Область техники
Настоящее изобретение относится к управлению транспортным средством, оборудованным AC-вращающейся электрической машиной, соединенной с ведущим колесом.
Уровень техники
Японский выложенный патент № 2017-163728 раскрывает транспортное средство, оборудованное AC-мотором, соединенным с ведущим колесом, аккумулятором и инвертором, сконфигурированным, чтобы преобразовывать DC-мощность, подаваемую от аккумулятора, в AC-мощность и подавать AC-мощность мотору.
В транспортном средстве, когда возникает такая неисправность, что ток не может протекать от мотора к аккумулятору, (т.е., аккумулятору запрещается заряжаться), и когда скорость вращения мотора во время рекуперации равна или выше предварительно определенного значения (т.е., когда прогнозируется, что противоэлектродвижущее напряжение больше напряжения аккумулятора), выполняется трехфазное управление включением, чтобы приводить трехфазные ветви инвертора в токопроводящее состояние. В результате, рекуперативный ток, формируемый во время рекуперации мотора, циркулирует между мотором и инвертором без подачи к аккумулятору. Следовательно, предотвращается заряд аккумулятора посредством рекуперативного тока от мотора.
Сущность изобретения
Хотя в трехфазном управлении включением, описанном выше, предотвращается подача рекуперативного тока в аккумулятор, поскольку рекуперативный ток протекает через инвертор, существует опасность перегрева инвертора из-за джоулева тепла. Следовательно, желательно развивать технологию, приспособленную для предотвращения заряда аккумулятора и предотвращения перегрева инвертора.
Настоящее изобретение было выполнено, чтобы решать вышеупомянутую проблему, и его целью является предотвращения заряда устройства аккумулирования мощности посредством рекуперативной мощности и предотвращения перегрева инвертора, когда устройству аккумулирования мощности запрещается заряжаться, в то время как вращающаяся электрическая машина приводится во вращение посредством движущей мощности от ведущего колеса.
(1) Приводное устройство согласно настоящему изобретению является приводным устройством для транспортного средства, оборудованного AC-вращающейся электрической машиной, соединенной с ведущим колесом, и включает в себя устройство аккумулирования мощности, инвертор, сконфигурированный, чтобы преобразовывать DC-мощность, подаваемую от устройства аккумулирования мощности, в AC-мощность и подавать AC-мощность к вращающейся электрической машине, и устройство управления, сконфигурированное, чтобы управлять инвертором. Устройство управления конфигурируется, чтобы выполнять управление нулевым крутящим моментом, чтобы приводить в действие инвертор, так что выходной крутящий момент от вращающейся электрической машины равен нулю, когда устройству аккумулирования мощности запрещается заряжаться, в то время как вращающаяся электрическая машина приводится во вращение посредством движущей мощности от ведущего колеса.
Согласно приводному устройству, описанному выше, когда устройству аккумулирования мощности запрещается заряжаться, в то время как вращающаяся электрическая машина приводится во вращение посредством движущей мощности от ведущего колеса, управление нулевым крутящим моментом выполняется, чтобы приводить в действие инвертор, так что выходной крутящий момент от вращающейся электрической машины равен нулю (т.е., PWM (широтно-импульсная модуляция) управление выполняется в инверторе, так что ток q-оси, протекающий через вращающуюся электрическую машину, равен нулю). Таким образом, когда вращающаяся электрическая машина приводится во вращение посредством движущей мощности от ведущего колеса, вращающаяся электрическая машина не формирует какой-либо рекуперативный крутящий момент, и, таким образом, рекуперативная мощность не формируется. Таким образом, предотвращается заряд устройства аккумулирования мощности посредством рекуперативной мощности, и предотвращается протекание рекуперативного тока через инвертор. В результате, предотвращается заряд устройства аккумулирования мощности посредством рекуперативной мощности, и предотвращается перегрев инвертора.
(2) В одном варианте осуществления устройство управления конфигурируется, чтобы выполнять управление нулевым крутящим моментом, когда устройству аккумулирования мощности запрещается заряжаться, в то время как вращающаяся электрическая машина приводится во вращение посредством движущей мощности от ведущего колеса, и когда определяется, что мощность, потерянная инвертором, больше рекуперативной мощности от вращающейся электрической машины во время управления нулевым крутящим моментом.
Если выходной крутящий момент от вращающейся электрической машины точно равен нулю, как желательно в результате управления нулевым крутящим моментом, вращающаяся электрическая машина не формирует какую-либо рекуперативную мощность. Однако, если, например, ошибка присутствует в обнаруженном значении резольвера, который обнаруживает угол поворота вращающейся электрической машины, выходной крутящий момент от вращающейся электрической машины не равен нулю во время управления нулевым крутящим моментом, но сдвигается в сторону рекуперации, и, таким образом, очень небольшое количество рекуперативной мощности может быть сформировано.
Принимая во внимание этот момент, в вышеописанном варианте осуществления, управление нулевым крутящим моментом выполняется, когда определяется (решается), что мощность, потерянная инвертором, больше рекуперативной мощности от вращающейся электрической машины во время управления нулевым крутящим моментом. Следовательно, даже если рекуперативная мощность формируется во время управления нулевым крутящим моментом, рекуперативная мощность теряется как тепло инвертором и не будет подаваться устройству аккумулирования мощности. Таким образом, возможно выполнять управление нулевым крутящим моментом, в то же время гарантируя, что устройство аккумулирования мощности не заряжается рекуперативной мощностью во время управления нулевым крутящим моментом.
(3) В одном варианте осуществления инвертор электрически подключается между устройством аккумулирования мощности и вращающейся электрической машиной и снабжается трехфазными возбуждающими ветвями, каждая из которых включает в себя верхнюю ветвь и нижнюю ветвь. Когда устройству аккумулирования мощности запрещается заряжаться, в то время как вращающаяся электрическая машина приводится во вращение посредством движущей мощности от ведущего колеса, и когда определяется, что мощность, потерянная инвертором, не больше рекуперативной мощности от рекуперативной электрической машины во время управления нулевым крутящим моментом, устройство управления выполняет трехфазное управление включением, чтобы поддерживать верхнюю ветвь или нижнюю ветвь каждой трехфазной возбуждающей ветви инвертора в токопроводящем состоянии.
Если рекуперативная мощность от вращающейся электрической машины больше мощности, потерянной инвертором во время управления нулевым крутящим моментом, часть рекуперативной мощности может подаваться устройству управления мощностью без потери инвертором.
Принимая во внимание этот момент, в вышеописанном варианте осуществления, когда определяется (решается), что мощность, потерянная инвертором, не больше рекуперативной мощности от вращающейся электрической машины во время управления нулевым крутящим моментом, трехфазное управление включением будет выполняться вместо управления нулевым крутящим моментом. Таким образом, во время, когда устройству аккумулирования мощности запрещается заряжаться, возможно предотвращать заряд устройства аккумулирования мощности посредством рекуперативной мощности более надежным образом.
(4) В одном варианте осуществления устройство управления определяет, что мощность, потерянная инвертором, больше рекуперативной мощности от вращающейся электрической машины во время управления нулевым крутящим моментом, когда скорость вращения вращающейся электрической машины меньше порогового значения, и определяет, что мощность, потерянная инвертором, не больше рекуперативной мощности от вращающейся электрической машины во время управления нулевым крутящим моментом, когда скорость вращения вращающейся электрической машины больше порогового значения.
Согласно вышеописанному варианту осуществления, возможно определять (решать), больше или нет мощность, потерянная инвертором, чем рекуперативная мощность от вращающейся электрической машины во время управления нулевым крутящим моментом, на основе результата сравнения между скоростью вращения вращающейся электрической машины и пороговым значением.
(5) В одном варианте осуществления, когда устройству аккумулирования мощности запрещается заряжаться, в то время как вращающаяся электрическая машина приводится во вращение посредством движущей мощности от ведущего колеса, и когда противоэлектродвижущее напряжение вращающейся электрической машины меньше напряжения устройства аккумулирования мощности, устройство управления выполняет управление выключением, чтобы приводить инвертор в состояние отключения затвора.
Когда противоэлектродвижущее напряжение вращающейся электрической машины меньше напряжения устройства аккумулирования мощности, рекуперативный ток не протекает от вращающейся электрической машины к устройству аккумулирования мощности, если инвертор установлен в состояние отключения затвора. Следовательно, в вышеописанном варианте осуществления, когда противоэлектродвижущее напряжение вращающейся электрической машины меньше напряжения устройства аккумулирования мощности, управление выключением выполняется, чтобы приводить инвертор в состояние отключения затвора. Таким образом, по сравнению со случаем, когда выполняется управление нулевым крутящим моментом, возможно предотвращать заряд устройства аккумулирования мощности посредством рекуперативной мощности более надежным образом.
(6) В одном варианте осуществления, когда устройству аккумулирования мощности запрещается заряжаться, в то время как вращающаяся электрическая машина приводится во вращение посредством движущей мощности от ведущего колеса, и когда определяется, что мощность, потерянная инвертором, больше рекуперативной мощности от вращающейся электрической машины во время управления нулевым крутящим моментом, устройство управления выполняет трехфазное управление включением, если обнаруживается, что устройство аккумулирования мощности заряжается.
Согласно вышеописанному варианту осуществления, когда обнаруживается, что устройство аккумулирования мощности заряжается, выполняется трехфазное управление включением. В результате, рекуперативный ток протекает между вращающейся электрической машиной и инвертором без подачи к устройству аккумулирования мощности, и, таким образом, предотвращается заряд устройства аккумулирования мощности.
(7) В одном варианте осуществления, когда устройству аккумулирования мощности запрещается заряжаться, в то время как вращающаяся электрическая машина приводится во вращение посредством движущей мощности от ведущего колеса, и когда определяется, что мощность, потерянная инвертором, не больше рекуперативной мощности от вращающейся электрической машины во время управления нулевым крутящим моментом, устройство управления выполняет управление нулевым крутящим моментом, если обнаруживается, что вращающаяся электрическая машина или инвертор перегревается.
Согласно вышеописанному варианту осуществления, когда обнаруживается, что вращающаяся электрическая машина или инвертор перегревается, выполняется управление нулевым крутящим моментом. В результате, ток, протекающий через вращающуюся электрическую машину и инвертор, уменьшается, и, таким образом, предотвращается перегрев вращающейся электрической машины или инвертора.
(8) Способ управления согласно настоящему изобретению является способом управления для управления транспортным средством, которое оборудуется AC-вращающейся электрической машиной, соединенной с ведущим колесом, устройством аккумулирования мощности, инвертором, сконфигурированным, чтобы преобразовывать DC-мощность, подаваемую из устройства аккумулирования мощности, в AC-мощность и подавать AC-мощность к вращающейся электрической машине. Способ управления включает в себя определение того, запрещается или нет устройству аккумулирования мощности заряжаться, в то время как вращающаяся электрическая машина приводится во вращение посредством движущей мощности от ведущего колеса, и выполнение управления нулевым крутящим моментом, чтобы возбуждать инвертор, так что выходной крутящий момент от вращающейся электрической машины равен нулю, когда устройству аккумулирования мощности запрещается заряжаться, в то время как вращающаяся электрическая машина приводится во вращение посредством движущей мощности от ведущего колеса.
Согласно вышеописанному способу, когда устройству аккумулирования мощности запрещается заряжаться, в то время как вращающаяся электрическая машина приводится во вращение посредством движущей мощности от ведущего колеса, управление нулевым крутящим моментом выполняется, чтобы возбуждать инвертор, так что выходной крутящий момент от вращающейся электрической машины равен нулю (т.е., PWM-управление выполняется в инверторе, так что ток q-оси, протекающий через вращающуюся электрическую машину, равен нулю). Таким образом, даже когда вращающаяся электрическая машина приводится во вращение посредством движущей мощности от ведущего колеса, вращающаяся электрическая машина не формирует какой-либо рекуперативный крутящий момент, и, таким образом, рекуперативная мощность не формируется. Таким образом, предотвращается заряд устройства аккумулирования мощности посредством рекуперативной мощности, и предотвращается протекание рекуперативного тока через инвертор. В результате, предотвращается заряд устройства аккумулирования мощности посредством рекуперативной мощности, и предотвращается перегрев инвертора.
Вышеупомянутые и другие цели, признаки, аспекты и преимущества настоящего изобретения станут более очевидными из следующего детального описания настоящего изобретения, которое приведено в связи с сопутствующими чертежами.
Краткое описание чертежей
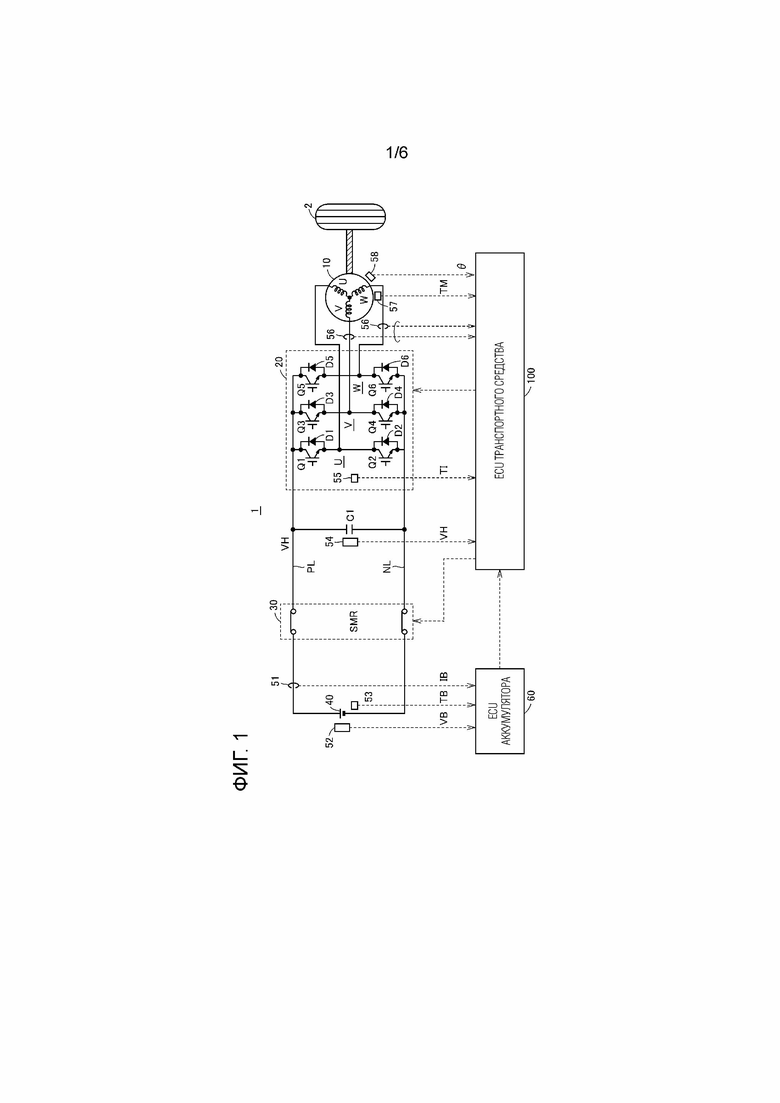
Фиг. 1 - блок-схема, схематично иллюстрирующая пример общей конфигурации транспортного средства;
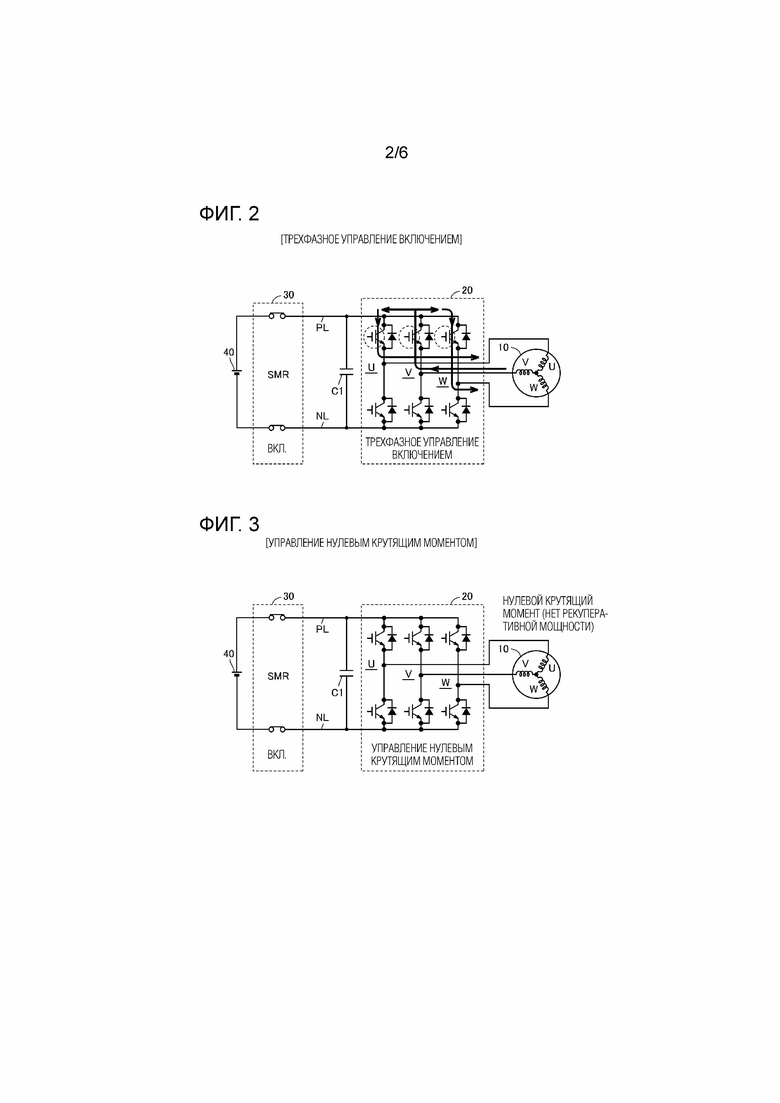
Фиг. 2 - схема, иллюстрирующая пример состояния цепи, когда выполняется трехфазное управление включением;
Фиг. 3 - схема, иллюстрирующая пример состояния цепи, когда выполняется управление нулевым крутящим моментом;
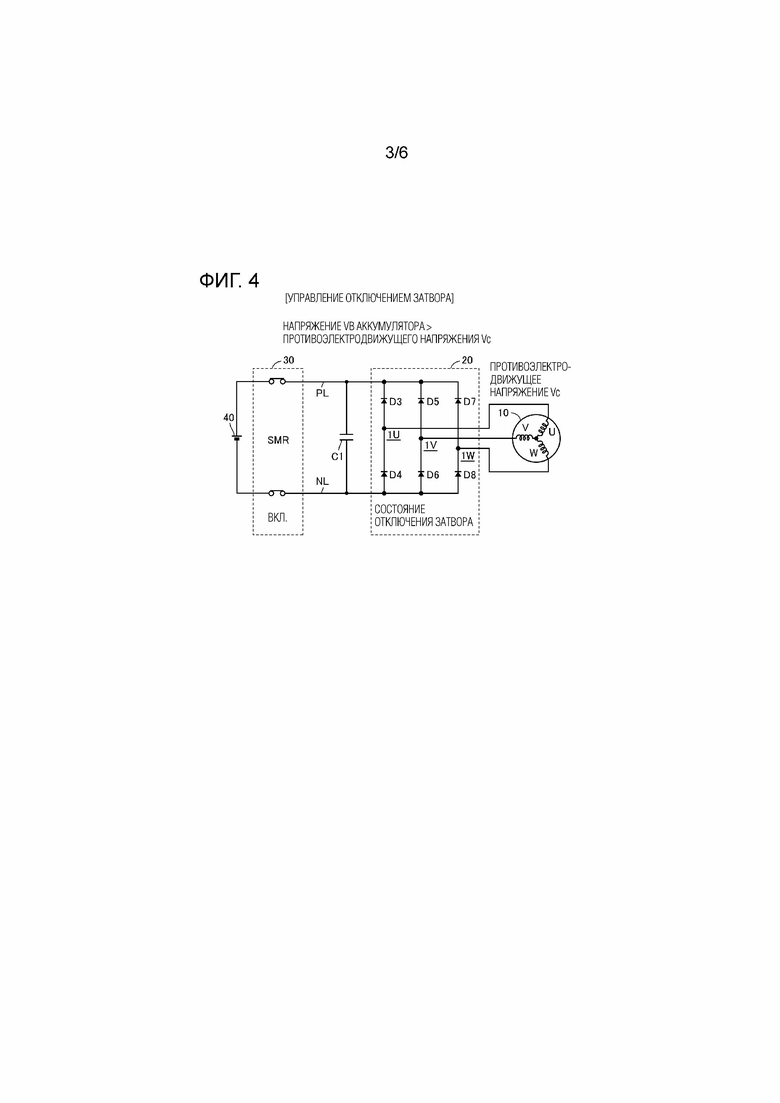
Фиг. 4 - схема, иллюстрирующая пример состояния цепи, когда выполняется управление отключением затвора;
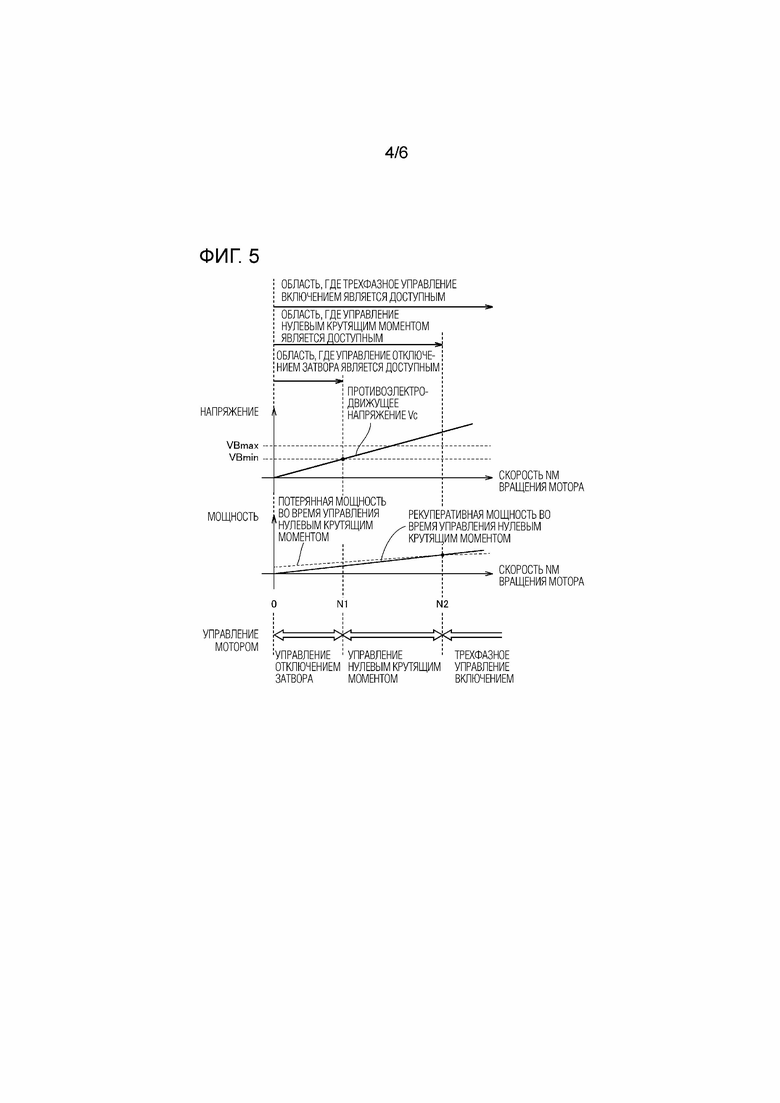
Фиг. 5 - схема, иллюстрирующая пример соотношения между противоэлектродвижущим напряжением Vc для MG и рекуперативной мощностью, сформированной вследствие рассогласования резольвера, и скоростью NM вращения мотора;
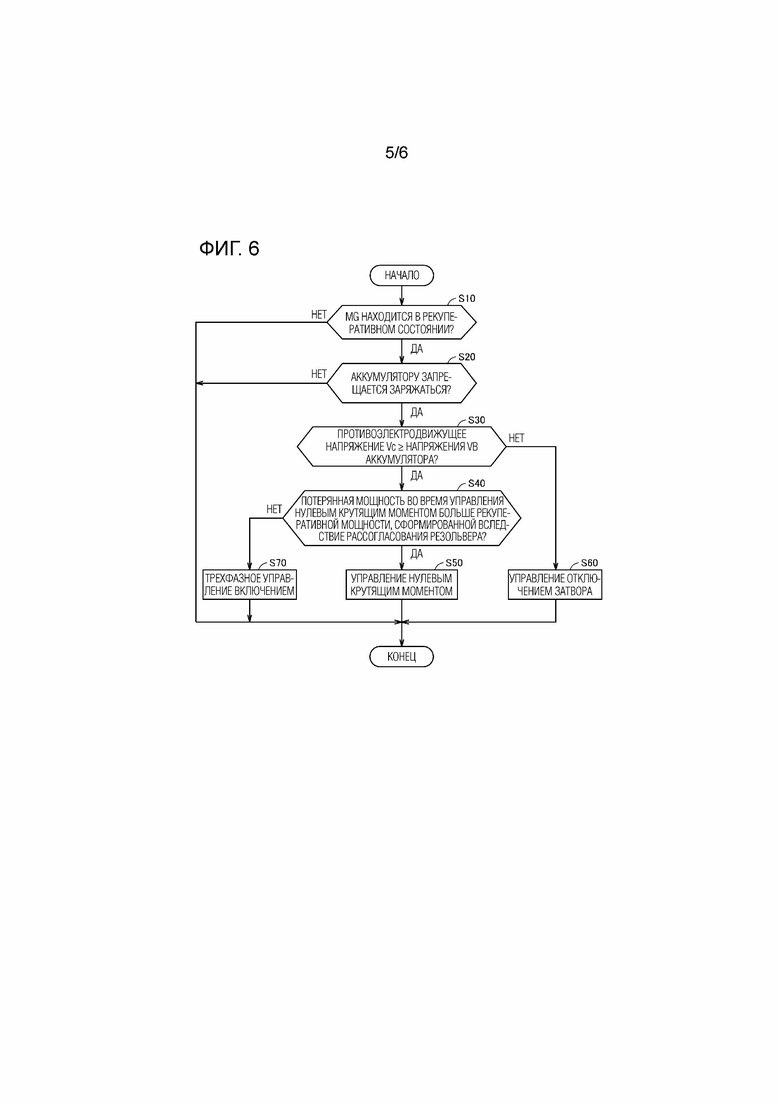
Фиг. 6 - блок-схема последовательности операций, иллюстрирующая пример процесса, который должен быть выполнен посредством ECU транспортного средства; и
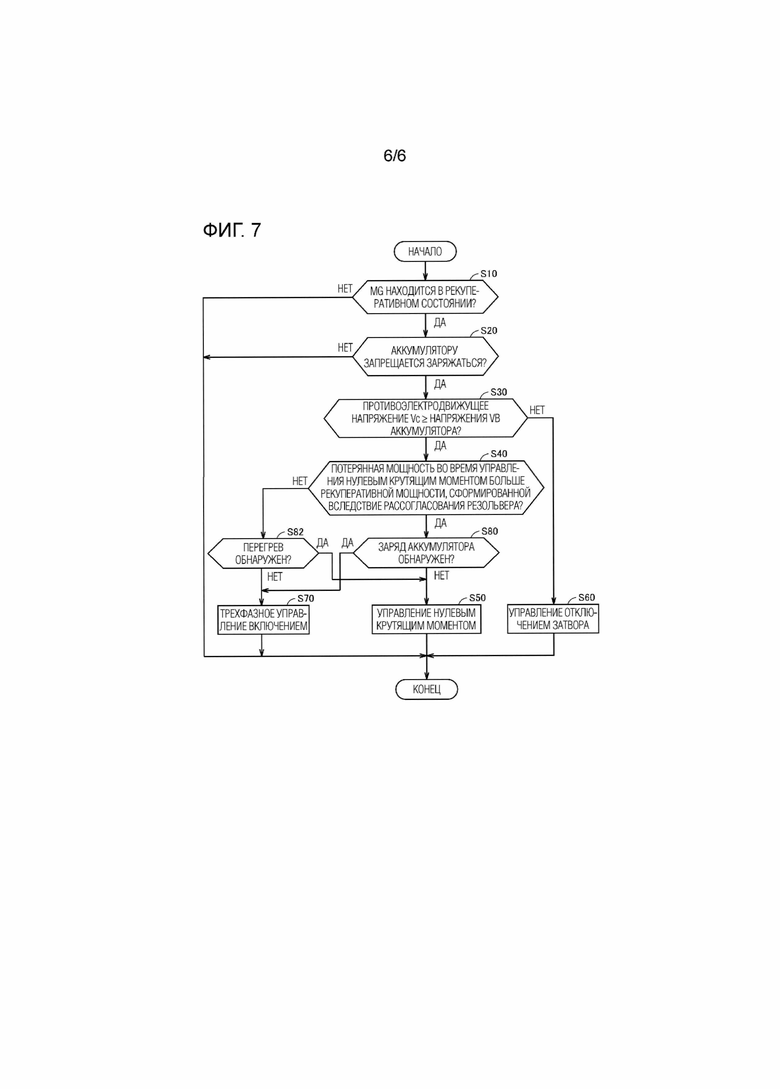
Фиг. 7 - блок-схема последовательности операций, иллюстрирующая другой пример процесса, который должен быть выполнен посредством ECU транспортного средства.
Описание предпочтительных вариантов осуществления
Далее в данном документе, вариант осуществления настоящего изобретения будет описан подробно со ссылкой на чертежи. На чертежах одинаковые или соответствующие части обозначаются одинаковыми ссылочными номерами, и их описание не будет повторяться.
Фиг. 1 представляет собой блок-схему, схематично иллюстрирующую пример общей конфигурации транспортного средства 1, оборудованного устройством привода согласно настоящему варианту осуществления. Транспортное средство 1 включает в себя ведущее колесо 2, MG (мотор-генератор) 10, инвертор 20, SMR (главное реле системы) 30, аккумулятор 40, ECU (электронный блок управления) 60 аккумулятора и ECU 100 транспортного средства.
Транспортное средство 1 конфигурируется, чтобы двигаться посредством движущей мощности, передаваемой от MG 10 к ведущему колесу 2. В дополнение к MG 10, транспортное средство 1 может включать в себя двигатель (не показан) в качестве источника привода.
MG 10 является трехфазным AC-мотором с постоянным типом магнита, включающим в себя постоянный магнит в роторе. Ротор для MG 10 механически соединяется с ведущим колесом 2. Хотя не показано на фиг. 1, в целом, зубчатая передача (редуктор скорости или т.п.) помещается между MG 10 и ведущим колесом 2.
MG 10 снабжается датчиком 57 температуры и резольвером 58. Датчик 57 температуры конфигурируется, чтобы обнаруживать температуру (температуру мотора) TM для MG 10 и выводить сигнал, указывающий результат обнаружения, в ECU 100 транспортного средства. Резольвер 58 конфигурируется, чтобы обнаруживать угол поворота (угол поворота мотора) θ ротора MG 10 и выводить сигнал, указывающий результат обнаружения, в ECU 100 транспортного средства.
Инвертор 20 включает в себя трехфазные ветви возбуждения (ветвь U U-фазы, ветвь V V-фазы, ветвь W W-фазы). Трехфазные ветви соединяются параллельно друг другу между силовыми линиями PL и NL. Ветвь U U-фазы включает в себя переключающие элементы Q1 и Q2, соединенные последовательно, ветвь V V-фазы включает в себя переключающие элементы Q3 и Q4, соединенные последовательно, ветвь W W-фазы включает в себя переключающие элементы Q5 и Q6. Диоды D1-D6 соединяются встречно-параллельно переключающим элементам Q1-Q6, соответственно.
Средняя точка каждой фазной ветви соединяется с соответствующей фазной катушкой MG 10. Другими словами один конец катушки U-фазы соединяется со средней точкой между переключающими элементами Q1 и Q2, один конец катушки V-фазы соединяется со средней точкой между переключающими элементами Q3 и Q4, и один конец катушки W-фазы соединяется со средней точкой между переключающими элементами Q5 и Q6. Другой конец катушки U-фазы, другой конец катушки V-фазы и другой конец катушки W-фазы соединяются друг с другом, чтобы формировать нейтральную точку.
Инвертор 20 снабжается датчиком 55 температуры. Датчик 55 температуры конфигурируется, чтобы обнаруживать температуру TI инвертора 20 и выводить сигнал, указывающий результат обнаружения, в ECU 100 транспортного средства. Датчик 56 тока конфигурируется, чтобы обнаруживать фазный ток, протекающий между инвертором 20 и MG 10, и выводить сигнал, указывающий результат обнаружения, в ECU 100 транспортного средства.
Инвертор 20 соединяется с аккумулятором 40 через силовые линии PL и NL. Конденсатор C1 соединяется между силовой линией PL и силовой линией NL. Конденсатор C1 конфигурируется, чтобы сглаживать колебание напряжения (системного напряжения VH) между силовой линией PL и силовой линией NL.
Датчик 54 напряжения конфигурируется, чтобы обнаруживать напряжение на концах конденсатора C1, другими словами, системное напряжение VH, и выводить сигнал, указывающий результат обнаружения, в ECU 100 транспортного средства.
SMR 30 вставляется между аккумулятором 40 и инвертором 20 и соединяется между силовыми линиями PL и NL. SMR 30 конфигурируется, чтобы переключать токопроводящее состояние (ВКЛ.) и состояние останова (ВЫКЛ.) между аккумулятором 40 и инвертором 20 в ответ на управляющий сигнал от ECU 100 транспортного средства.
Аккумулятор 40 иллюстрируется как характерный пример перезаряжаемого устройства аккумулирования мощности. Аккумулятор 40 типично является аккумуляторной батареей, такой как никелево-водородная аккумуляторная батарея или литиево-ионная аккумуляторная батарея. Конденсатор, такой как электрический двухслойный конденсатор, может быть использован в качестве устройства аккумулирования мощности вместо аккумулятора 40.
Аккумулятор 40 снабжается датчиком 51 тока, датчиком 52 напряжения и датчиком 53 температуры. Датчик 51 тока конфигурируется, чтобы обнаруживать ток (ток аккумулятора) IB, протекающий через аккумулятор 40. Датчик 52 напряжения конфигурируется, чтобы обнаруживать напряжение (напряжение аккумулятора) VB аккумулятора 40. Датчик 53 температуры конфигурируется, чтобы обнаруживать температуру (температуру аккумулятора) TB аккумулятора 40. Каждый датчик конфигурируется, чтобы выводить сигнал, указывающий результат обнаружения, в ECU 60 аккумулятора.
ECU 60 аккумулятора включает в себя CPU (центральный процессор), память, буфер ввода/вывода и т.п. ECU 60 аккумулятора конфигурируется, чтобы наблюдать за состоянием аккумулятора 40 на основе результатов обнаружения (тока IB аккумулятора, напряжения VB аккумулятора и температуры TB аккумулятора) от датчика 51 тока, датчика 52 напряжения и датчика 53 температуры, соответственно, и выводить сигнал, указывающий результат наблюдения аккумулятора 40, в ECU 100 транспортного средства.
Например, когда, по меньшей мере, одно из тока IB аккумулятора, напряжения VB аккумулятора и температуры TB аккумулятора является ненормальным значением за пределами предварительно определенного нормального диапазона, предполагается, что, по меньшей мере, один из аккумулятора 40, датчика 51 тока, датчика 52 напряжения и датчика 53 температуры отказал, ECU 60 аккумулятора определяет, что аккумулятору 40 должно быть запрещено заряжаться для того, чтобы не допускать избыточного заряда аккумулятора 40. Следует отметить, что аккумулятору 40 должно быть запрещено заряжаться, когда напряжение VB аккумулятора близко к полностью заряженному напряжению, хотя оно находится в нормальном диапазоне. Когда определяется, что аккумулятору 40 должно быть запрещено заряжаться, ECU 60 аккумулятора выводит запрос запрета заряда в ECU 100 транспортного средства.
ECU 100 транспортного средства включает в себя CPU, память, буфер ввода/вывода и т.п. На основе сигнала от каждого из датчика 54 напряжения, датчиков 55, 57 температуры, датчика 56 тока и резольвера 58, а также карты и программы, сохраненной в памяти, ECU 100 транспортного средства управляет инвертором 20, так, чтобы инструктировать транспортному средству 1 двигаться, когда желательно. Отметим, что управление ECU 100 транспортного средства не ограничивается обработкой посредством программного обеспечения, оно может быть обработано посредством специализированных аппаратных средств (электронной схемы).
ECU 100 транспортного средства определяет, устанавливать ли режим управления для MG 10 в режим движения от мощности или режим рекуперации, на основе скорости транспортного средства и величины задействования педали акселератора пользователем.
В режиме движения от мощности ECU 100 транспортного средства управляет инвертором 20 так, чтобы преобразовывать DC-мощность от аккумулятора 40 в AC-мощность и подавать AC-мощность к MG 10. Таким образом, MG 10 находится в режиме движения от мощности (состоянии, в котором MG 10 приводится во вращение посредством электрической мощности от аккумулятора 40) и передает крутящий момент движения от мощности ведущему колесу 2.
Когда аккумулятору 40 не запрещается заряжаться в режиме рекуперации (т.е., когда запрос запрета заряда не принимается от ECU 60 аккумулятора), ECU 100 транспортного средства управляет инвертором 20 так, чтобы инструктировать MG 10 формировать рекуперативную мощность во время состояния (далее в данном документе также называемого "рекуперативным состоянием"), в котором MG 10 приводится во вращение посредством движущей мощности от ведущего колеса 2, чтобы формировать противоэлектродвижущее напряжение. В результате, MG 10 передает рекуперативный крутящий момент (тормозной момент), соответствующий рекуперативной мощности, ведущему колесу 2. Рекуперативная мощность преобразуется в DC-мощность и подается к аккумулятору 40 посредством инвертора 20.
Хотя ECU 60 аккумулятора и ECU 100 транспортного средства иллюстрируются как размещенные раздельно на фиг. 1, два ECU могут быть объединены в единый функциональный блок.
<Отказоустойчивое управление, когда аккумулятору запрещается заряжаться>
Когда аккумулятору 40 должно быть запрещено заряжаться (т.е., когда определяется посредством ECU 60 аккумулятора, что аккумулятору 40 должно быть запрещено заряжаться) вследствие неисправности в аккумуляторе 40 или т.п., желательно, чтобы рекуперативная мощность MG 10 не подавалась к аккумулятору 40. С другой стороны, даже когда аккумулятору 40 запрещается заряжаться, для того, чтобы побуждать транспортное средство 1 двигаться в отказоустойчивом режиме, желательно, чтобы SMR 30 поддерживалось во включенном состоянии, с тем, чтобы предоставлять возможность электрической мощности разряжаться из аккумулятора 40 на MG 10.
Следовательно, когда аккумулятору 40 запрещается заряжаться (т.е., когда запрос запрета заряда принимается от ECU 60 аккумулятора), ECU 100 транспортного средства согласно настоящему варианту осуществления выполняет отказоустойчивое управление на инверторе 20, чтобы поддерживать SMR 30 во включенном состоянии, с тем, чтобы предоставлять возможность аккумулятору 40 разряжаться, но не допускать заряда аккумулятора 40.
Во время отказоустойчивого управления, для того, чтобы не допускать переключения SMR 30 между включенным состоянием и выключенным состоянием сложным образом, SMR 30 постоянно поддерживается во включенном состоянии независимо от того, находится ли MG 10 в состоянии движения от мощности или в состоянии рекуперации. Следовательно, когда MG 10 находится в режиме рекуперации, требуется управлять инвертором 20 с тем, чтобы не допускать заряда аккумулятора 40.
Фиг. 2 является схемой, иллюстрирующей пример состояния цепи, когда трехфазное управление включением выполняется на инверторе 20, в то время как MG 10 приводится во вращение посредством движущей мощности от ведущего колеса 2 (т.е., в состоянии рекуперации). Трехфазное управление включением является управлением, сконфигурированным, чтобы поддерживать верхнюю ветвь (переключающие элементы Q1, Q3, Q5) для каждой из трех фаз инвертора 20 в токопроводящем состоянии. Отметим, что трехфазное управление включением может быть управлением, сконфигурированным, чтобы поддерживать нижнюю ветвь (переключающие элементы Q2, Q4, Q6) для каждого из трех фаз инвертора 20 в токопроводящем состоянии.
Когда ротор MG 10 вращается посредством ведущего колеса 2, противоэлектродвижущее напряжение (противоэлектродвижущая мощность) Vc формируется в MG 10. Вследствие трехфазного управления включением, рекуперативный ток, получающийся в результате из противоэлектродвижущего напряжения Vc, может протекать через верхнюю ветвь для каждой из трех фаз инвертора 20 в обоих направлениях. Следовательно, рекуперативный ток циркулирует между MG 10 и инвертором 20 без подачи к аккумулятору 40, имеющему большое сопротивление. Таким образом, предотвращается заряд аккумулятора 40 посредством рекуперативной мощности MG 10.
Хотя в трехфазном управлении включением, описанном выше, предотвращается подача рекуперативного тока в аккумулятор 40, поскольку рекуперативный ток протекает через инвертор, существует опасность перегрева инвертора 20 из-за джоулева тепла. Следовательно, желательно, чтобы предотвращался заряд аккумулятора 40, и предотвращался перегрев инвертора 20.
Следовательно, ECU 100 транспортного средства согласно настоящему варианту осуществления выполняет управление нулевым крутящим моментом на инверторе 20, когда аккумулятору 40 запрещается заряжаться, в то время как MG 10 приводится во вращение посредством движущей мощности от ведущего колеса 2.
Управление нулевым крутящим моментом является управлением для возбуждения инвертора 20, так что выходной крутящий момент из MG 10 равен нулю. В целом, d-q-осная вращающаяся система координат, состоящая из направления магнитного потока (d-оси) постоянного магнита ротора и направления (q-оси), ортогонального направлению магнитного потока, используется в управлении MG 10. В управлении нулевым крутящим моментом согласно настоящему варианту осуществления, инвертор 20 возбуждается посредством PWM-управления, так что командное значение тока в направлении q-оси, способствующее выходному крутящему моменту из MG 10, равно нулю в d-q-осной вращающейся системе координат на основе угла θ поворота мотора, который является обнаруженным значением резольвера 58.
Фиг. 3 представляет собой схему, иллюстрирующую пример состояния цепи, когда управление нулевым крутящим моментом выполняется на инверторе 20, в то время как MG 10 приводится во вращение движущей мощностью от ведущего колеса 2.
Даже когда MG 10 приводится во вращение посредством движущей мощности от ведущего колеса 2, если управление нулевым крутящим моментом выполняется, предотвращается формирование посредством MG 10 рекуперативного крутящего момента, и, таким образом, рекуперативная мощность не формируется. Следовательно, предотвращается заряд аккумулятора 40 посредством рекуперативной мощности, и предотвращается протекание рекуперативного тока через инвертор 20. В результате, предотвращается заряд аккумулятора 40 посредством рекуперативной мощности, и предотвращается перегрев инвертора 20.
Если выходной крутящий момент от MG 10 точно равен нулю, как желательно в результате управления нулевым крутящим моментом, MG 10 не формирует какую-либо рекуперативную мощность. Однако, если ошибка присутствует в угле θ поворота мотора, обнаруженном посредством резольвера 58 вследствие того факта, что позиция установки резольвера 58 отклоняется от предварительно определенной эталонной позиции (рассогласование резольвера), выходной крутящий момент от MG 10 не становится нулевым во время управления нулевым крутящим моментом, а сдвигается в сторону рекуперации, и, таким образом, очень небольшое количество рекуперативной мощности может быть сформировано.
Принимая во внимание этот момент, когда аккумулятору 40 запрещается заряжаться, в то время как MG 10 приводится во вращение посредством движущей мощности от ведущего колеса 2, ECU 100 транспортного средства согласно настоящему варианту осуществления выполняет управление нулевым крутящим моментом, в то же время гарантируя, что рекуперативная мощность, которая может быть сформирована вследствие рассогласования резольвера во время управления нулевым крутящим моментом, теряется в качестве тепла инвертором 20.
В частности, ECU 100 транспортного средства вычисляет рекуперативную мощность, сформированную посредством MG 10 вследствие ошибки в угле θ поворота мотора, которая вызвана рассогласованием резольвера во время управления нулевым крутящим моментом (далее в данном документе называется "рекуперативной мощностью, сформированной вследствие рассогласования резольвера во время управления нулевым крутящим моментом" или просто "рекуперативной мощностью во время управления нулевым крутящим моментом"), и электрическую мощность, которая теряется в качестве тепла инвертором 20 во время управления нулевым крутящим моментом (далее в данном документе также называется "потерянной мощностью во время управления нулевым крутящим моментом"), с помощью скорости вращения MG 10 (далее в данном документе называется "скоростью NM вращения мотора") или скорости транспортного средства в качестве параметра. Затем, ECU 100 транспортного средства сравнивает рекуперативную мощность, сформированную вследствие рассогласования резольвера во время управления нулевым крутящим моментом, с потерянной мощностью во время управления нулевым крутящим моментом. Скорость NM вращения мотора может быть вычислена, например, из цикла угла θ поворота мотора, который является значением обнаружения посредством резольвера 58.
Когда потерянная мощность во время управления нулевым крутящим моментом больше рекуперативной мощности, сформированной вследствие рассогласования резольвера во время управления нулевым крутящим моментом, ECU 100 транспортного средства выполняет управление нулевым крутящим моментом. Следовательно, даже если рекуперативная мощность формируется вследствие рассогласования резольвера во время управления нулевым крутящим моментом, рекуперативная мощность теряется в качестве тепла инвертором 20 без подачи к аккумулятору 40. В результате, возможно предотвращать заряд аккумулятора 40 посредством рекуперативной мощности, сформированной вследствие рассогласования резольвера во время управления нулевым крутящим моментом, более надлежащим образом.
С другой стороны, когда потерянная мощность во время управления нулевым крутящим моментом меньше рекуперативной мощности, сформированной вследствие рассогласования резольвера во время управления нулевым крутящим моментом, даже если управление нулевым крутящим моментом выполняется, часть рекуперативной мощности, сформированной вследствие рассогласования резольвера, может быть подана к аккумулятору 40 без потери инвертором 20. Следовательно, ECU 100 транспортного средства выполняет трехфазное управление включением вместо управления нулевым крутящим моментом. В результате, возможно предотвращать заряд аккумулятора 40 посредством рекуперативной мощности, сформированной вследствие рассогласования резольвера, более надежно.
Кроме того, когда противоэлектродвижущее напряжение Vc для MG 10 меньше напряжения VB аккумулятора, даже если все ветви (переключающие элементы Q1-Q6) инвертора 20 поддерживаются в непроводящем состоянии, рекуперативный ток не будет протекать от MG 10 к аккумулятору 40. Принимая во внимание этот момент, когда противоэлектродвижущее напряжение Vc для MG 10 меньше напряжения VB аккумулятора, ECU 100 транспортного средства согласно настоящему варианту осуществления выполняет управление отключением затвора, чтобы поддерживать все ветви инвертора 20 в непроводящем состоянии.
Фиг. 4 представляет собой схему, иллюстрирующую пример состояния цепи, когда управление отключением затвора выполняется на инверторе 20, когда противоэлектродвижущее напряжение Vc для MG 10 меньше напряжения VB аккумулятора. Когда управление отключением затвора выполняется, противоэлектродвижущее напряжение Vc прикладывается к аккумулятору 40 через диоды D1, D3 и D5 инвертора 20, но поскольку противоэлектродвижущее напряжение Vc меньше напряжения VB аккумулятора, ток не будет протекать в направлении от MG 10 в направлении аккумулятора 40. Таким образом, предотвращается заряд аккумулятора 40 посредством рекуперативной мощности, и предотвращается перегрев инвертора 20 более надлежащим образом.
И противоэлектродвижущее напряжение Vc для MG 10, и рекуперативная мощность, сформированная вследствие рассогласования резольвера, имеют такую характеристику, что каждый параметр увеличивается, когда скорость NM вращения мотора увеличивается. Принимая во внимание этот момент, когда аккумулятору 40 запрещается заряжаться, в то время как MG 10 приводится во вращение посредством движущей мощности от ведущего колеса 2, ECU 100 транспортного средства согласно настоящему варианту осуществления определяет, какое управление из управления нулевым крутящим моментом, трехфазного управления включением и управления отключением затвора должно выполняться, с помощью скорости NM вращения мотора в качестве параметра.
Фиг. 5 представляет собой схему, иллюстрирующую пример соотношения между противоэлектродвижущим напряжением Vc для MG 10 и рекуперативной мощностью, формируемой вследствие рассогласования резольвера во время управления нулевым крутящим моментом, и скоростью NM вращения мотора.
Противоэлектродвижущее напряжение Vc для MG 10 имеет такую характеристику, что оно увеличивается, когда скорость NM вращения мотора увеличивается. С другой стороны, напряжение VB аккумулятора может колебаться между минимальным значением VBmin и максимальным значением VBmax в ответ на величину заряда аккумулятора 40. Следовательно, например, скорость NM вращения мотора во время, когда противоэлектродвижущее напряжение Vc равно минимальному значению VBmin напряжения аккумулятора, получается посредством экспериментов или т.п. и сохраняется заранее в памяти в качестве первого порогового значения N1. Таким образом, то, меньше или нет противоэлектродвижущее напряжение Vc напряжения VB аккумулятора, может быть определено (решено) на основе результата сравнения между скоростью NM вращения мотора, вычисленной из значения обнаружения посредством резольвера 58, и первого порогового значения N1, сохраненного в памяти (см. верхнюю часть на фиг. 5).
Рекуперативная мощность, сформированная вследствие рассогласования резольвера во время управления нулевым крутящим моментом, также имеет такую характеристику, что она увеличивается, когда скорость NM вращения мотора увеличивается. Потерянная мощность во время управления нулевым крутящим моментом возникает, даже когда скорость NM вращения мотора равна 0, и увеличивается, когда скорость NM вращения мотора увеличивается, но приращение (градиент увеличения) потерянной мощности во время управления нулевым крутящим моментом, когда скорость NM вращения мотора увеличивается на единицу измерения величины, меньше приращения (градиента увеличения) рекуперативной мощности, сформированной вследствие рассогласования резольвера во время управления нулевым крутящим моментом, когда скорость NM вращения мотора увеличивается на единицу измерения величины. Следовательно, например, скорость NM вращения мотора во время, когда рекуперативная мощность, сформированная вследствие рассогласования резольвера во время управления нулевым крутящим моментом, равна потерянной мощности во время управления нулевым крутящим моментом, получается посредством экспериментов или т.п. и сохраняется заранее в качестве второго порогового значения N2. Таким образом, то, больше или нет рекуперативная мощность, сформированная вследствие рассогласования резольвера во время управления нулевым крутящим моментом, чем потерянная мощность во время управления нулевым крутящим моментом, может быть определено (решено) на основе результата сравнения между скоростью NM вращения мотора, вычисленной из значения обнаружения посредством резольвера 58, и вторым пороговым значением N2, сохраненным в памяти (см. нижнюю часть на фиг. 5).
Как иллюстрировано на фиг. 5, поскольку рекуперативная мощность, сформированная вследствие рассогласования резольвера во время управления нулевым крутящим моментом, является очень небольшой, обычно, второе пороговое значение N2 (т.е., скорость NM вращения мотора во время, когда рекуперативная мощность, сформированная вследствие рассогласования резольвера во время управления нулевым крутящим моментом) больше первого порогового значения N1 (т.е., скорость NM вращения мотора во время, когда противоэлектродвижущее напряжение Vc равно минимальному значению VBmin напряжения аккумулятора), как иллюстрировано на фиг. 5.
В области, где скорость NM вращения мотора равна или больше порогового значения N1, но меньше второго порогового значения N2, даже если рекуперативная мощность формируется вследствие рассогласования резольвера во время управления нулевым крутящим моментом, рекуперативная мощность может быть потеряна как тепло инвертором 20 без подачи к аккумулятору 40, ECU 100 транспортного средства выполняет управление нулевым крутящим моментом.
В области, где скорость NM вращения мотора равна или больше второго порогового значения N2, даже если выполняется управление нулевым крутящим моментом, часть рекуперативной мощности, сформированной вследствие рассогласования резольвера, может быть подана к аккумулятору 40 без потери инвертором 20, ECU 100 транспортного средства выполняет трехфазное управление включением вместо управления нулевым крутящим моментом.
Кроме того, в области, где скорость NM вращения мотора меньше первого порогового значения N1, даже если все ветви инвертора 20 поддерживаются в непроводящем состоянии, рекуперативный ток может не протекать от MG 10 к аккумулятору 40, ECU 100 транспортного средства выполняет управление отключением затвора.
Фиг. 6 представляет собой блок-схему последовательности операций, иллюстрирующую пример процесса, который должен быть выполнен посредством ECU 100 транспортного средства. Эта блок-схема последовательности операций циклически выполняется каждый раз, когда, например, удовлетворяется предварительно определенное условие.
ECU 100 транспортного средства определяет, находится или нет MG 10 в рекуперативном состоянии (т.е., состоянии, в котором MG 10 приводится во вращение посредством движущей мощности от ведущего колеса 2) (этап S10). Когда определяется, что MG 10 не находится в рекуперативном состоянии (Нет на этапе S10), ECU 100 транспортного средства пропускает последующие этапы и переходит к возврату.
Когда определяется, что MG 10 находится в рекуперативном состоянии (Да на этапе S10), ECU 100 транспортного средства определяет, запрещается или нет аккумулятору 40 заряжаться (этап S20). ECU 100 транспортного средства определяет, что аккумулятору 40 запрещается заряжаться, когда ECU 100 транспортного средства принимает запрос запрета заряда от ECU 60 аккумулятора.
Когда определяется, что аккумулятору 40 не запрещается заряжаться (Нет на этапе S20), ECU 100 транспортного средства пропускает последующие этапы и переходит к возврату. В этом случае, как описано выше, обычное управление выполняется в инверторе 20 с тем, чтобы инструктировать MG 10 формировать рекуперативную мощность.
Когда определяется, что аккумулятору 40 запрещается заряжаться (Да на этапе S20), ECU 100 транспортного средства определяет, действительно или нет противоэлектродвижущее Vc для MG 10 равно или больше напряжению VB аккумулятора (этап S30). В настоящем варианте осуществления, как описано выше со ссылкой на фиг. 5, когда скорость NM вращения мотора, вычисленная из значения обнаружения посредством резольвера 58, равна или больше первого порогового значения N1 (т.е., скорости NM вращения мотора во время, когда противоэлектродвижущее напряжение Vc равно минимальному значению VBmin напряжения аккумулятора), ECU 100 транспортного средства определяет, что противоэлектродвижущее напряжение Vc равно или больше напряжения VB аккумулятора. Способ для определения того, действительно или нет противоэлектродвижущее напряжение Vc равно или больше напряжения VB аккумулятора, не ограничивается вышеописанным способом. Например, противоэлектродвижущее напряжение Vc для MG 10 может быть вычислено из скорости NM вращения мотора, вычисленной из значения обнаружения посредством резольвера 58, и то, действительно или нет вычисленное противоэлектродвижущее напряжение Vc равно или больше напряжения VB аккумулятора, обнаруженного посредством датчика 52 напряжения, может быть определено посредством сравнения.
Когда определяется, что противоэлектродвижущее напряжение Vc меньше напряжения VB аккумулятора (Нет на этапе S30), ECU 100 транспортного средства выполняет управление отключением затвора в инверторе 20 (этап S60).
Когда определяется, что противоэлектродвижущее напряжение Vc равно или больше напряжения VB аккумулятора (Да на этапе S30), ECU 100 транспортного средства определяет, больше или нет потерянная мощность во время управления нулевым крутящим моментом, чем рекуперативная мощность, сформированная вследствие рассогласования резольвера (этап S40). Например, как описано выше со ссылкой на фиг. 5, когда скорость NM вращения мотора меньше второго порогового значения N2, ECU 100 транспортного средства определяет, что потерянная мощность во время управления нулевым крутящим моментом больше рекуперативной мощности, сформированной вследствие рассогласования резольвера.
Когда определяется, что потерянная мощность во время управления нулевым крутящим моментом больше рекуперативной мощности, сформированной вследствие рассогласования резольвера (Да на этапе S40), ECU 100 транспортного средства выполняет управление нулевым крутящим моментом в инверторе 20 (этап S50).
Когда определяется, что потерянная мощность во время управления нулевым крутящим моментом меньше рекуперативной мощности, сформированной вследствие рассогласования резольвера (Нет на этапе S40), ECU 100 транспортного средства выполняет трехфазное управление включением в инверторе 20 (этап S70).
Как описано выше, когда аккумулятору 40 запрещается заряжаться, в то время как MG 10 приводится во вращение посредством движущей мощности от ведущего колеса 2, ECU 100 транспортного средства согласно настоящему варианту осуществления выполняет управление нулевым крутящим моментом в инверторе 20. Таким образом, даже когда MG 10 приводится во вращение посредством движущей мощности от ведущего колеса 2, MG 10 не формирует какой-либо рекуперативный крутящий момент, и, таким образом, рекуперативная мощность не формируется. Следовательно, предотвращается заряд аккумулятора 40 посредством рекуперативной мощности, и предотвращается протекание рекуперативного тока через инвертор 20. В результате, предотвращается заряд аккумулятора 40 посредством рекуперативной мощности, и предотвращается перегрев инвертора 20.
В частности, когда аккумулятору 40 запрещается заряжаться, в то время как MG 10 приводится во вращение посредством движущей мощности от ведущего колеса 2, и когда потерянная мощность во время управления нулевым крутящим моментом больше рекуперативной мощности, сформированной вследствие рассогласования резольвера, выполняется управление нулевым крутящим моментом. Следовательно, даже если рекуперативная мощность формируется вследствие рассогласования резольвера во время управления нулевым крутящим моментом, рекуперативная мощность теряется в качестве тепла инвертором 20 без подачи к аккумулятору 40. Таким образом, возможно выполнять управление нулевым крутящим моментом, в то же время гарантируя, что аккумулятор 40 не заряжается рекуперативной мощностью во время управления нулевым крутящим моментом.
Когда рекуперативная мощность формируется вследствие рассогласования резольвера во время управления нулевым крутящим моментом, рекуперативная мощность теряется как тепло инвертором 20, но, поскольку рекуперативная мощность, сформированная вследствие рассогласования резольвера во время управления нулевым крутящим моментом, чрезвычайно меньше рекуперативной мощности, сформированной во время трехфазного управления включением, количество тепла, сформировавшегося в инверторе 20, является очень небольшим по сравнению с количеством тепла, сформировавшегося во время трехфазного управления включением. Следовательно, предотвращается перегрев инвертора 20.
Дополнительно, когда аккумулятору 40 запрещается заряжаться, в то время как MG 10 приводится во вращение посредством движущей мощности от ведущего колеса 2, и когда потерянная мощность во время управления нулевым крутящим моментом меньше рекуперативной мощности, сформированной вследствие рассогласования резольвера, даже если управление нулевым крутящим моментом выполняется, часть рекуперативной мощности, сформированной вследствие рассогласования резольвера, может подаваться к аккумулятору 40 без потери инвертором 20, и, таким образом, выполняется трехфазное управление включением. Таким образом, во время, когда аккумулятору 40 запрещается заряжаться, возможно предотвращать заряд аккумулятора 40 посредством рекуперативной мощности более надежным образом.
Кроме того, когда аккумулятору 40 запрещается заряжаться, в то время как MG 10 приводится во вращение посредством движущей мощности от ведущего колеса 2, и когда противоэлектродвижущее напряжение Vc для MG 10 меньше напряжения VB аккумулятора, даже если все ветви инвертора 20 поддерживаются в непроводящем состоянии, рекуперативный ток может не протекать от MG 10 к аккумулятору 40, ECU 100 транспортного средства согласно настоящему варианту осуществления выполняет управление отключением затвора в инверторе 20. Таким образом, по сравнению со случаем, когда выполняется управление нулевым крутящим моментом, возможно предотвращать заряд аккумулятора 40 посредством рекуперативной мощности более надежным образом.
Более конкретно, ECU 100 транспортного средства согласно настоящему варианту осуществления может определять (решать), меньше или нет противоэлектродвижущее напряжение VC, чем напряжение VB аккумулятора, на основе результата сравнения между скоростью NM вращения мотора и первым пороговым значением N1 (т.е., скоростью NM вращения мотора, полученная посредством экспериментов или т.п. во время, когда противоэлектродвижущее напряжение Vc равно минимальному значению VBmin напряжения аккумулятора), сохраненного заранее в памяти. Аналогично, ECU 100 транспортного средства согласно настоящему варианту осуществления может определять (решать), действительно или нет рекуперативная мощность, сформированная вследствие рассогласования резольвера во время управления нулевым крутящим моментом, больше потерянной мощности во время управления нулевым крутящим моментом, на основе результата сравнения между скоростью NM вращения мотора и вторым пороговым значением N2 (т.е., скоростью NM вращения мотора, полученной посредством экспериментов или т.п. во время, когда рекуперативная мощность сформирована вследствие рассогласования резольвера во время управления нулевым крутящим моментом), сохраненным заранее в памяти. Таким образом, когда аккумулятору 40 запрещается заряжаться, в то время как MG 10 вращается посредством движущей мощности от ведущего колеса 2, возможно определять, какое управление из управления нулевым крутящим моментом, трехфазного управления включением и управления отключением затвора должно выполняться, на основе скорости NM вращения.
Параметр, используемый для определения того, какое управление из управления нулевым крутящим моментом, трехфазного управления включением и управления отключением затвора должно выполняться, может быть любым параметром, который коррелирует со скоростью NM вращения мотора. Например, возможно определять, какое управление из управления нулевым крутящим моментом, трехфазного управления включением и управления отключением затвора должно выполняться, на основе скорости вращения (скорости транспортного средства) ведущего колеса 2, которое механически соединяется с MG 10.
Первая модификация
В варианте осуществления, описанном выше, когда аккумулятору 40 запрещается заряжаться, в то время как MG 10 приводится во вращение посредством движущей мощности от ведущего колеса 2, и когда скорость NM вращения мотора находится в области, где скорость NM вращения мотора равна или больше первого порогового значения N1, но меньше второго порогового значения N2, выполняется управление нулевым крутящим моментом. Однако, если обнаруживается, что аккумулятор 40 фактически заряжается в этой области, трехфазное управление включением может выполняться вместо управления нулевым крутящим моментом, с тем, чтобы запрещать заряд.
В варианте осуществления, описанном выше, когда аккумулятору 40 запрещается заряжаться, в то время как MG 10 приводится во вращение посредством движущей мощности от ведущего колеса 2, и когда скорость NM вращения мотора находится в диапазоне, где скорость NM вращения мотора равна или больше второго порогового значения N2, трехфазное управление включением выполняется. Однако, если обнаруживается, что инвертор 20 или MG 10 перегревается в этой области, управление нулевым крутящим моментом может быть выполнено вместо трехфазного управления включением, с тем, чтобы предотвращать перегрев.
Фиг. 7 представляет собой блок-схему последовательности операций, иллюстрирующую пример процесса, который должен быть выполнен посредством ECU 100 транспортного средства согласно первой модификации. В блок-схеме последовательности операций, иллюстрированной на фиг. 7, этап S80 и этап S82 добавляются в вышеописанную блок-схему последовательности операций, иллюстрированную на фиг. 6. Поскольку другие этапы (этапы, пронумерованные так же, что и этапы, иллюстрированные на фиг. 6) уже были описаны выше, подробное описание не будет повторяться.
Если определяется, что противоэлектродвижущее напряжение Vc равно или больше напряжения VB аккумулятора (Да на этапе S30), и потерянная мощность во время управления нулевым крутящим моментом больше рекуперативной мощности, сформированной вследствие рассогласования резольвера (Да на этапе S40), другими словами, если скорость NM вращения мотора находится в диапазоне, где скорость NM вращения мотора равна или больше первого порогового значения N1, но меньше второго порогового значения N2, ECU 100 транспортного средства определяет, обнаруживается или нет, что аккумулятор 40 фактически заряжается (этап S80). В частности, когда ECU 100 транспортного средства принимает от ECU 60 аккумулятора информацию, указывающую, что ток для заряда аккумулятора 40 обнаруживается посредством датчика 51 тока, ECU 100 транспортного средства определяет, что обнаруживается, что аккумулятор 40 фактически заряжается.
Когда обнаруживается, что аккумулятор 40 фактически не заряжается (Нет на этапе S80), ECU 100 транспортного средства выполняет управление нулевым крутящим моментом (этап S50).
Когда обнаруживается, что аккумулятор 40 фактически заряжается (Да на этапе S80), ECU 100 транспортного средства выполняет трехфазное управление включением вместо управления нулевым крутящим моментом (этап S70). В результате, рекуперативный ток теряется во время циркуляции между MG 10 и инвертором 20 без подачи к аккумулятору 40, имеющему большое сопротивление, что делает возможным предотвращение заряда аккумулятора 40.
Если определяется, что противоэлектродвижущее напряжение Vc равно или больше напряжения VB аккумулятора (Да на этапе S30), и потерянная мощность во время управления нулевым крутящим моментом меньше рекуперативной мощности, сформированной вследствие рассогласования в установке резольвера (Нет на этапе S40), другими словами, если скорость NM вращения мотора находится в диапазоне, где скорость NM вращения мотора равна или больше второго порогового значения N2, ECU 100 транспортного средства определяет, обнаруживается или нет, что инвертор 20 или MG 10 перегревается (этап S82). В частности, если температура TI инвертора 20, обнаруженная посредством датчика 55 температуры, больше допустимой температуры инвертора 20, или если температура TM мотора, обнаруженная посредством датчика 57 температуры, больше допустимой температуры MG 10, ECU 100 транспортного средства определяет, что обнаруживается, что инвертор 20 или MG 10 перегревается.
Когда обнаруживается, что инвертор 20 или MG 10 не перегревается (Нет на этапе S82), ECU 100 транспортного средства выполняет трехфазное управление включением (этап S50).
Когда обнаруживается, что инвертор 20 или MG 10 перегревается (Да на этапе S82), ECU 100 транспортного средства выполняет управление нулевым крутящим моментом вместо трехфазного управления включением (этап S50), с тем, чтобы предотвращать перегрев. Таким образом, ток, протекающий через инвертор 20 или MG 10, уменьшается по сравнению со случаем, когда выполняется трехфазное управление включением, что делает возможным предотвращение перегрева инвертора 20 или MG 10.
Таким образом, трехфазное управление включением и управление нулевым крутящим моментом могут быть выбраны на основе того, обнаруживается или нет фактический заряд или перегрев, в дополнение к области, содержащей скорость NM вращения мотора.
Вторая модификация
В процессе, иллюстрированном на фиг. 6 и 7, этап S20 выполняется после этапа S10, этап S20 может быть выполнен перед этапом S10.
Другими словами, когда аккумулятору 40 запрещается заряжаться (Да на этапе S20), последующие этапы продолжаются, а когда заряд аккумулятора 40 не запрещается (Нет на этапе S20), последующие этапы пропускаются, и процесс переходит к возврату (с тем, чтобы выполнять обычное управление).
Хотя настоящее изобретение подробно описано и проиллюстрировано, очевидно, что оно служит только в качестве иллюстрации и примера и не должно восприниматься в качестве ограничения, при этом объем настоящего изобретения интерпретируется только посредством прилагаемой формулы изобретения.
Изобретение относится к транспортным средствам. Приводное устройство для транспортного средства, оборудованного AC-вращающейся электрической машиной, соединенной с ведущим колесом, содержит устройство аккумулирования мощности; инвертор, DC/AC преобразователь мощности и устройство управления инвертором. Устройство управления выполнено с возможностью осуществления управления нулевым крутящим моментом, чтобы возбуждать инвертор, так что выходной крутящий момент от вращающейся электрической машины равен нулю, когда устройству аккумулирования мощности запрещается заряжаться, в то время как вращающаяся электрическая машина приводится во вращение посредством движущей мощности от ведущего колеса. Предотвращается перегрев инвертора. 2 н. и 6 з.п. ф-лы, 7 ил.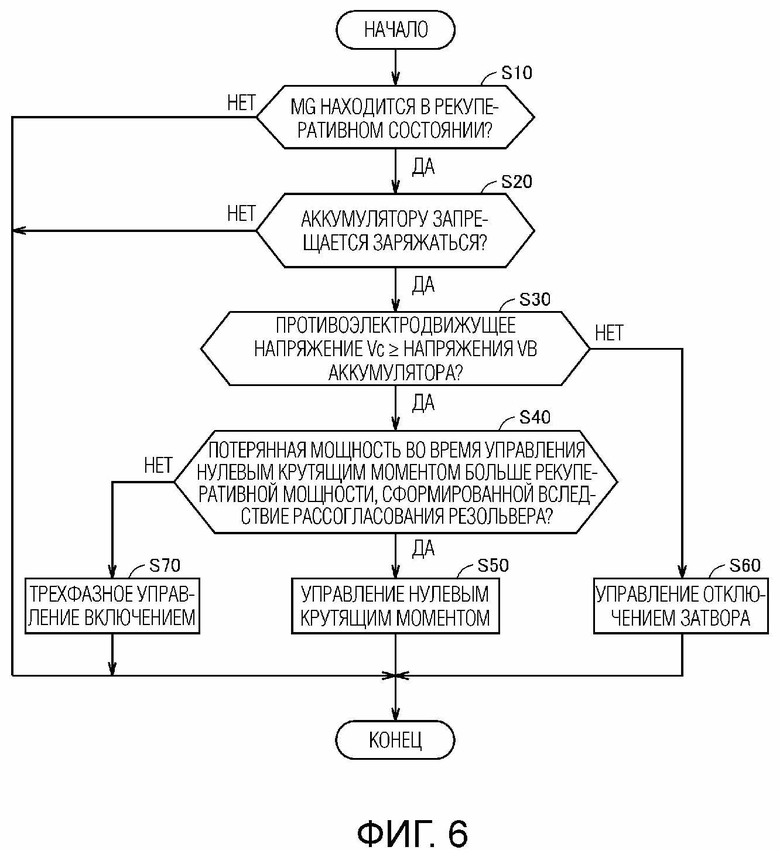
1. Приводное устройство для транспортного средства, оборудованного AC-вращающейся электрической машиной, соединенной с ведущим колесом, содержащее:
устройство аккумулирования мощности;
инвертор, выполненный с возможностью преобразования DC-мощности, подаваемой от устройства аккумулирования мощности, в AC-мощность и подачи AC-мощности к вращающейся электрической машине; и
устройство управления, выполненное с возможностью управления инвертором,
при этом устройство управления выполнено с возможностью осуществления управления нулевым крутящим моментом, чтобы возбуждать инвертор, так что выходной крутящий момент от вращающейся электрической машины равен нулю, когда устройству аккумулирования мощности запрещается заряжаться, в то время как вращающаяся электрическая машина приводится во вращение посредством движущей мощности от ведущего колеса.
2. Приводное устройство по п.1, в котором устройство управления выполнено с возможностью осуществления управления нулевым крутящим моментом, когда устройству аккумулирования мощности запрещается заряжаться, в то время как вращающаяся электрическая машина приводится во вращение посредством движущей мощности от ведущего колеса, и когда определяется, что мощность, потерянная инвертором, превышает рекуперативную мощность от вращающейся электрической машины во время управления нулевым крутящим моментом.
3. Приводное устройство по п. 1 или 2, в котором
инвертор электрически подключен между устройством аккумулирования мощности и вращающейся электрической машиной и снабжен трехфазными возбуждающими ветвями, каждая из которых включает в себя верхнюю ветвь и нижнюю ветвь,
причем устройство управления выполнено с возможностью осуществления трехфазного управления включением, чтобы поддерживать верхнюю ветвь или нижнюю ветвь каждой трехфазной возбуждающей ветви инвертора в токопроводящем состоянии, когда устройству аккумулирования мощности запрещается заряжаться, в то время как вращающаяся электрическая машина приводится во вращение посредством движущей мощности от ведущего колеса, и когда определяется, что мощность, потерянная инвертором, не превышает рекуперативную мощность от вращающейся электрической машины во время управления нулевым крутящим моментом.
4. Приводное устройство по п. 2 или 3, в котором устройство управления выполнено с возможностью:
определения того, что мощность, потерянная инвертором, превышает рекуперативную мощность от вращающейся электрической машины во время управления нулевым крутящим моментом, когда скорость вращения вращающейся электрической машины меньше порогового значения; и
определения того, что мощность, потерянная инвертором, не превышает рекуперативную мощность от вращающейся электрической машины во время управления нулевым крутящим моментом, когда скорость вращения вращающейся электрической машины превышает пороговое значение.
5. Приводное устройство по любому из пп. 1-4, в котором устройство управления выполнено с возможностью осуществления управления выключением, чтобы приводить инвертор в состояние отключения затвора, когда устройству аккумулирования мощности запрещается заряжаться, в то время как вращающаяся электрическая машина приводится во вращение посредством движущей мощности от ведущего колеса, и когда противоэлектродвижущее напряжение вращающейся электрической машины меньше напряжения устройства аккумулирования мощности.
6. Приводное устройство по любому из пп. 3-5, в котором, даже когда устройству аккумулирования мощности запрещается заряжаться, в то время как вращающаяся электрическая машина приводится во вращение посредством движущей мощности от ведущего колеса, и когда определяется, что мощность, потерянная инвертором, превышает рекуперативную мощность от вращающейся электрической машины во время управления нулевым крутящим моментом, устройство управления выполнено с возможностью осуществления трехфазного управления включением, когда обнаруживается, что устройство аккумулирования мощности заряжается.
7. Приводное устройство по любому из пп. 3-5, в котором, даже когда устройству аккумулирования мощности запрещается заряжаться, в то время как вращающаяся электрическая машина приводится во вращение посредством движущей мощности от ведущего колеса, и когда определяется, что мощность, потерянная инвертором, не превышает рекуперативную мощность от вращающейся электрической машины во время управления нулевым крутящим моментом, устройство управления выполнено с возможностью осуществления управления нулевым крутящим моментом, когда обнаруживается, что вращающаяся электрическая машина или инвертор перегревается.
8. Способ управления приводным устройством транспортного средства, оборудованного AC-вращающейся электрической машиной, соединенной с ведущим колесом, устройством аккумулирования мощности и инвертором, причем инвертор выполнен с возможностью преобразования DC-мощности, подаваемой от устройства аккумулирования мощности, в AC-мощность и подачи AC-мощности к вращающейся электрической машине, при этом способ включает этапы, на которых:
определяют, запрещается или нет устройству аккумулирования мощности заряжаться, в то время как вращающаяся электрическая машина приводится во вращение посредством движущей мощности от ведущего колеса; и
выполняют управление нулевым крутящим моментом, чтобы возбуждать инвертор, так что выходной крутящий момент от вращающейся электрической машины равен нулю, когда устройству аккумулирования мощности запрещается заряжаться, в то время как вращающаяся электрическая машина приводится во вращение посредством движущей мощности от ведущего колеса.
| US 2017264229 A1, 14.09.2017 | |||
| JP 2006340599 A, 14.12.2006 | |||
| СИСТЕМА ПРИВОДА ДВИГАТЕЛЯ С ПЕРЕМЕННЫМ МАГНИТНЫМ ПОТОКОМ | 2007 |
|
RU2397600C1 |
| JP 2000116170 A, 21.04.2000. | |||

