Это изобретение относится к автономной анимированной жизненной форме, в частности роботизированной жизненной форме/спутнику, имеющему подобные живым характеристики и реакции.
УРОВЕНЬ ТЕХНИКИ ИЗОБРЕТЕНИЯ
Роботизированные жизненные формы, имеющие подобные живым характеристики, были введены и использовались по всему миру. Например, детеныш динозавра, продаваемый под торговым знаком PLEO, является роботизированным питомцем, который испытал значительный коммерческий успех и является интересным и приятным домашним животным. Однако по-настоящему милый и интересный питомец - домашнее животное, способное к воспроизведению реакции живого существа в многочисленных аспектах подобных живым реакций на свою окружающую среду и своего хозяина или хозяйку, может иметь ограниченные возможности. Например, если робот ограничен по своей возможности реагировать на голосовую команду, датчик касания или внешнее условие и воспроизводить требуемую подобную живой реакцию, он является менее желательным в качестве жизненной формы или питомца. Реакция должна отражать уровень раздражителя, такого как ласкание, в противоположность удару, и отвечать соответствующей анимацией. Однако если база данных предварительно анимированных допустимых движений ограничена, действие и нрав роботизированного устройства ограничен подобным образом.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
В варианте осуществления настоящего изобретения, вышеупомянутая проблема ограниченной реакции робота решается ответными мерами посредством предоставления роботизированного домашнего животного, реагирующего на некоторое количество внешних входных сигналов, инициированных его человеком-владельцем или из других внешних раздражителей, и который, в пределах своей внутренней робототехники, обладает способностью реагирования одним из некоторого количества возможных рабочих режимов, чтобы по-настоящему выдавать подобную живой реакцию ради удовольствия и наслаждения своего владельца.
В еще одном аспекте изобретения, датчики ввода робота чувствительны к некоторому количеству воспринимаемых условий, в том числе, перегрузкам, движению, направлению движения, положению тела робота и ускорению.
В еще одном аспекте изобретения, внешние датчики ввода реагируют на раздражители питания, тепло и холод, голосовые команды, условия света или темноты, соответствующие времени суток, наличие препятствий или крутых склонов и другие условия, на которые реагировала бы живая жизненная форма.
Еще одним другим аспектом настоящего изобретения является способность робота распознавать голос своего владельца и реагировать соответственно подобным живому образом.
Другие преимущества и возможности этого изобретения станут очевидными из последующего описания, взятого в связи с прилагаемыми чертежами, на которых в качестве иллюстрации и примера изложен вариант осуществления настоящего изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг. 1 иллюстрирует примерную роботизированную жизненную форму по настоящему изобретению, представляющую собой детеныша динозавра и показывающую местоположения различных датчиков;
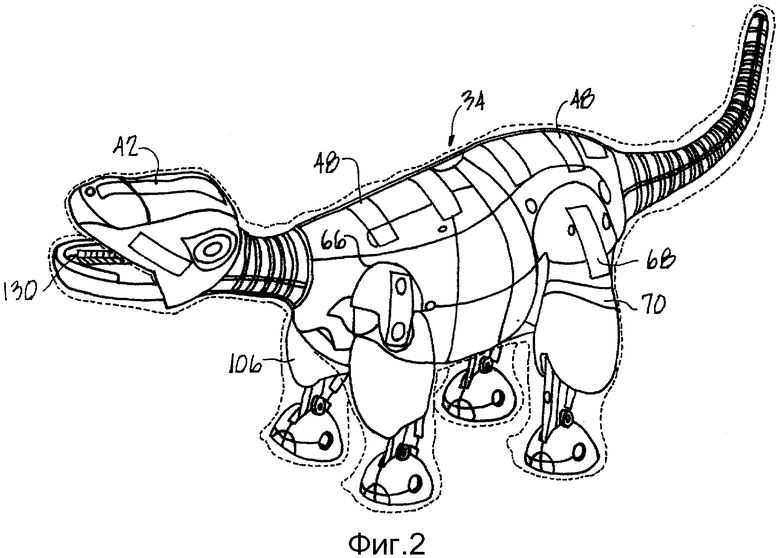
фиг. 2 показывает роботизированную жизненную форму по фиг. 1 со снятой ее наружной оболочкой для показа внутренних деталей;
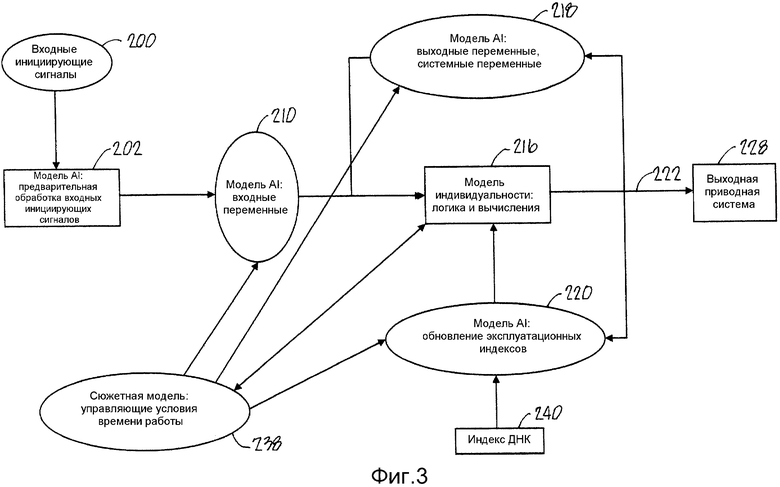
фиг. 3 - схема последовательности операций, показывающая модели с искусственным интеллектом и индивидуальности роботизированной жизненной формы по настоящему изобретению;
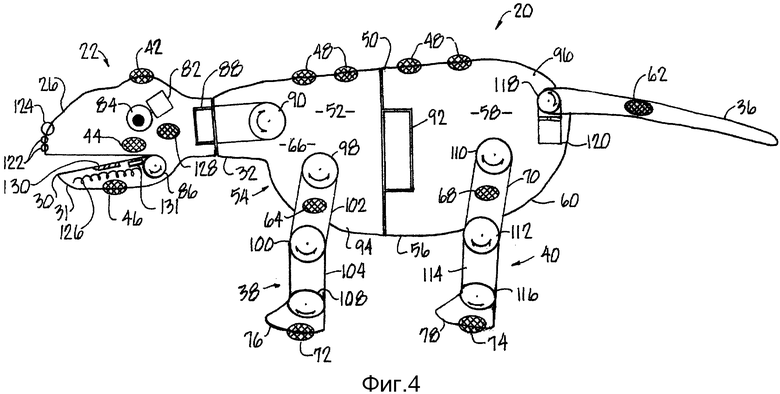
фиг. 4 - схематический вид сбоку роботизированной жизненной формы, показывающий приводы и датчики;
фиг. 5 - блок-схема последовательности операций способа, внутреннее программное обеспечение, реагирующее на внешние входные инициирующие сигналы;
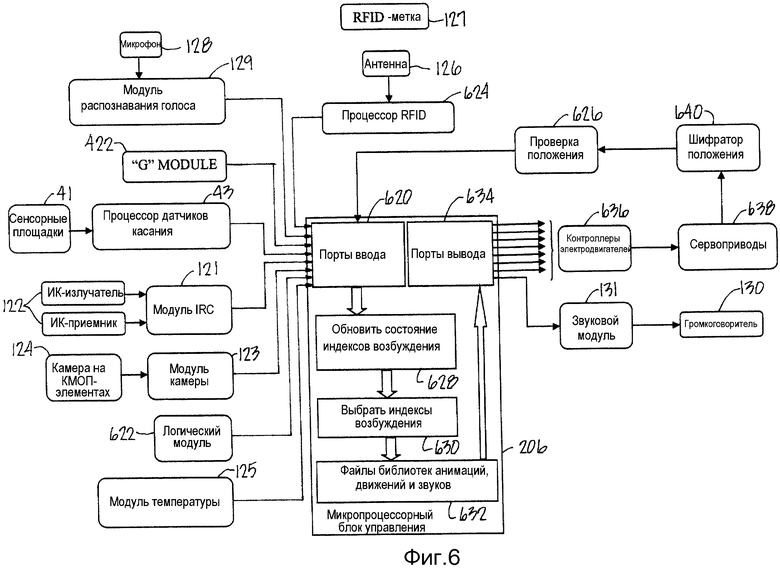
фиг. 6 - структурная схема аппаратных средств роботизированной жизненной формы;
фиг. 7 - таблица врожденных атрибутов и значений;
фиг. 7A - таблица индексов ДНК;
фиг. 8 - таблица установки приоритета анимаций, являющихся результатом ассоциативно связанных индексов возбуждения;
фиг. 9 - пример выбранных групп анимаций, каждая из которых вырабатывает соответствующее поведение робота;
фиг. 10A-K - таблицы, перечисляющие внешние входные сигналы и получающиеся в результате режимы возбуждения;
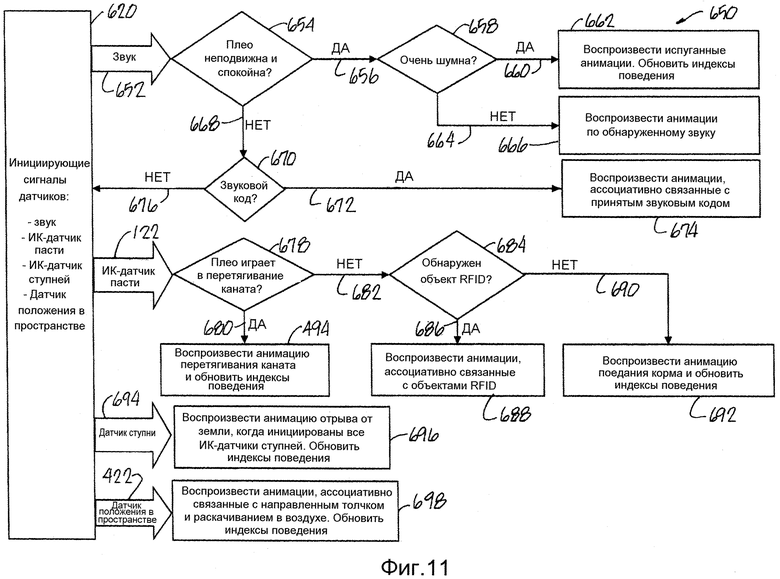
фиг. 11 - структурная схема, иллюстрирующая действие четырех инициаторов датчиков;
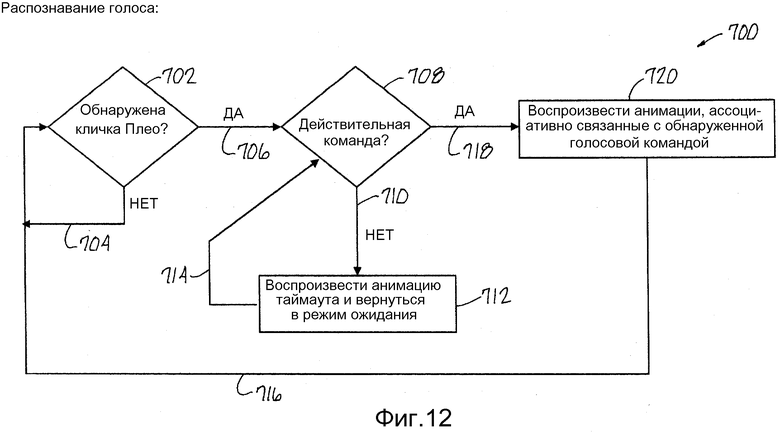
фиг. 12 - структурная схема распознавания голоса;
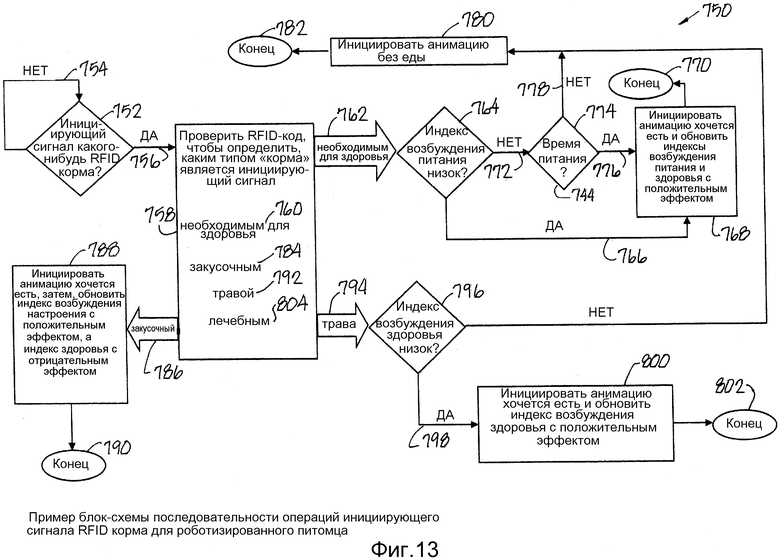
фиг. 13 - пример схемы последовательности операций инициирующего сигнала RFID корма и
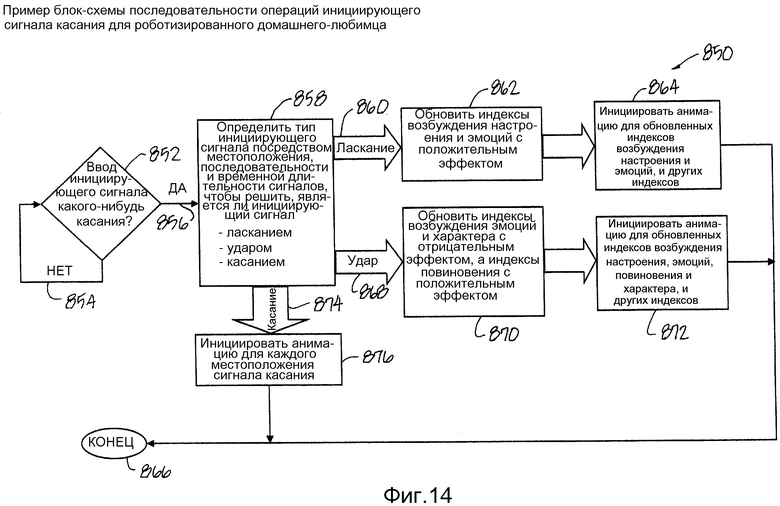
фиг. 14 - блок-схема последовательности операций способа инициирующего сигнала касания.
ПОДРОБНОЕ ОПИСАНИЕ
Сначала, со ссылкой на фиг. 1, роботизированная жизненная форма по настоящему изобретению в целом указана номером 20 ссылки. Как проиллюстрировано, роботизированная жизненная форма 20 находится в виде молодого динозавра камаразавра, хорошо известного динозавра-завропода, найденного в Северной Америке и в наибольшей степени изобилующего в ископаемых из позднего юрского периода. Его голова 22 является короткой и коробчатой, с ноздрями 24, посаженными над его мордой 26 и перед его глазами 28, и пастью 30. Его шея 32 короче и толще, чем у большинства динозавров-завроподов, и он обладает толстым туловищем 34 и коротким до некоторой степени сплюснутым хвостом 36. Его передние лапы или передние ноги 38 и задние лапы или задние ноги 40 имеют приблизительно одинаковую длину, задние лапы 40 является слегка более длинными. В предпочтительном варианте осуществления роботизированная жизненная форма 20 сконфигурирована в качестве молодого камаразавра, имитирующего его воспринимаемые движения, поведение, индивидуальность, взаимодействие со своей окружающей средой, эмоции, реакции и смышленость, включая обучение. Однако, это изобретение не ограничено предпочтительным вариантом осуществления, изложенным в материалах настоящей заявки, так как доктрины этого раскрытия могут быть применены к другим жизненным формам и роботизированным жизненным формам. Например, движения, поведение, индивидуальность, относящиеся к окружающей среде взаимодействия, эмоции, реакции и смышленость могут быть применены к собаке, в частности к ее началу вскармливания в качестве щенка и прохождению через взрослую собаку и заканчивая старой собакой, и применяются к другим обычным формам домашних животных, например, таких как кошка, черепаха, кролик, лошадь, свинья, корова и т. д.
Со ссылкой на фиг. 1, 2, 4 и 6, внутри робот включает в себя переключатели, датчики, электронные элементы управления, сервоприводы и электродвигатели в дополнение к программному обеспечению для приведения в действие электронного питомца 20. Один или более датчиков 42 касания головы могут быть расположены вдоль макушки головы 22. Датчики включают в себя сенсорные площадки 41 (фиг. 6), присоединенные к процессору 43 датчиков касания. Два или более датчиков 44 касания щек могут быть расположены на противоположных сторонах головы 22. Один или более датчиков 46 касания подбородка могут быть расположены под пастью 30 и распределяться по его переду и бокам. Вдоль туловища 34 роботизированного питомца, могут быть расположены один или более датчиков 48 касания, показаны четыре датчика 48. Как проиллюстрировано на фиг. 4, датчики 48 касания туловища расположены только вдоль спины 50 роботизированной жизненной формы 20, с тем чтобы не загромождать иллюстрацию. Однако должно быть понятно, что множество датчиков касания туловища могут быть расположены по бокам 52 груди 54, живота 56, бедер 58 и зада 60 роботизированной жизненной формы 20, если требуется. Один или более датчиков 62 касания хвоста могут быть расположены вдоль хвоста 36. Один или более датчиков 64 касания лопаток могут быть расположены на противоположных плечах 66 роботизированной жизненной формы 20. Один или более датчиков 68 касания бедер могут быть расположены на противоположных бедрах 70 роботизированной жизненной формы 20. Один или более датчиков 72 и 74 касания ступнями земли могут быть расположены в каждой из передней 76 и задней 78 ступней. В качестве альтернативы, каждая ступня 76 и 78 может включать в себя контактные переключатели.
Датчики касания могут быть дискретными датчиками касания или, в зависимости от местоположения, полосковым датчиком касания. Например, вдоль макушки головы 22 датчик 42 касания головы может быть одиночным дискретным датчиком касания, а датчик 48 касания туловища может быть дискретным датчикам касания или одиночным полосковым датчиком касания, продолжающимся от загривка 32 вдоль спины 50 до хвоста 36. Дискретные или полосковые датчики касания могут быть воспринимающими усилие резисторами с переменным уровнем чувствительности, например, используя делитель напряжения. Все из датчиков касания являются частью сетки датчиков касания, покрывающей часть или по существу всю наружную оболочку роботизированного питомца. Сетка датчиков касания, например, может использоваться на туловище 34 наряду с тем, что дискретные датчики касания расположены в специфичных зонах, таких как нижние части ступней 76 и 78. Другие датчики касания, такие как емкостные датчики касания физических усилий, также могут использоваться. Датчики касания, такие как тонкопленочные гибкие тактильные датчики усилий и/или давления, также могут использоваться.
Несколько сервоприводов могут быть реализованы в роботизированной жизненной форме 20. Два или более сервоприводов 82 глаз (фиг. 4) управляют движением глаз 28 и век 84. Сервопривод 86 пасти управляет открыванием и закрыванием пасти 30. Сервопривод 88 головы присоединяет голову 22 к шее 32, чтобы двигать головой 22 в крутильном движении. Сервопривод 90 шеи присоединяет шею 32 к туловищу 34 для движения шеей 32 и головой 22 из стороны в сторону, вверх и вниз, и в крутильном движении. Сервопривод 92 скручивания туловища присоединяет переднее туловище 94 к заднему туловищу 96, чтобы поворачивать и скручивать туловище 34.
Пара верхних сервоприводов 98 передних ног присоединяет передние ноги 38 к плечам 66 для движения передних конечностей каждой ноги 38 от ассоциативно связанного плеча 66 по каждую сторону роботизированной жизненной формы 20. Пара средних сервоприводов 100 передних ног присоединяет верхние части 102 передних ног 38 к нижним частям 104 передних ног 38 для движения передних конечностей в передних коленях или локтях 106. Пара нижних приводов 108 передних ног присоединяет нижние части 104 передних ног 38 к передним ступням 76, чтобы обеспечивать поворотное и/или крутильное движение ступней 76.
Пара верхних сервоприводов 110 задних ног присоединяет задние ноги 40 к бедрам 58 для движения задних конечностей от бедер 58. Пара средних сервоприводов 112 задних ног присоединяет голени 70 к нижним частям 114 задних ног 40 для движения задних конечностей в задних коленях. Пара нижних приводов 116 задних ног присоединяет нижние части 114 задних ног 40 к ступням 78, чтобы обеспечивать поворотное и/или крутильное движение ступней 78.
Сервопривод 118 движения хвоста вверх-вниз и сервопривод 120 движения хвоста из стороны в сторону присоединяют хвост 36 к заднему туловищу 96 для движения хвоста. Управление сервоприводом может быть единичным или в любой комбинации для совершения движения. Например, сервопривод 88 головы может двигать головой 22 из стороны в сторону как при покачивании головой 22 «нет» или вверх и вниз, как при покачивании головы 22 «да». Сервопривод 88 головы присоединяет голову 22 к шее, чтобы двигать головой 22 в крутильном движении.
Один или более инфракрасных передатчиков/приемников 122 могут быть встроены в морду 26 для восприятия присутствия других роботизированных жизненных форм и/или приема другой информации. Передатчики/приемники 122 присоединены к ИК-модулю 121 (фиг. 6). ИК-передатчики/приемники 122 могут использоваться для восприятия объектов и границ, например, чтобы предохранять роботизированную жизненную форму 20 от падения с поверхности стола или другой приподнятой конструкции.
Камера 124 на КМОП-структурах, присоединенная к модулю 123 камеры, может быть встроена в морду 26 возле ИК-передатчика 122 (фиг. 4 и 6) для обнаружения условий освещения, таких как день и ночь. Датчик 125 температуры выдает входные сигналы температуры окружающей среды, которые могут оказывать влияние на различные режимы работы и поведение роботизированной жизненной формы 20.
Считыватель 126 радиочастотной идентификации (RFID) может быть интегрирован в пасть 30 роботизированной жизненной формы, чтобы реагировать на RFID-метки 127, идентифицированные в качестве корма, идентификационных карт и/или средств обучения. Хотя дальность действия RFID 126 может быть вплоть до сорока футов, дальность действия конкретного RFID 126, вставленного в пасть 30 роботизированной жизненные формы, может быть ограничена требованием объекта быть в контакте или очень близко от подбородка 31 роботизированной жизненной формы до нескольких дюймов или футов от RFID 126.
Пара микрофонов, расположенных на 128 на каждой стороне головы 22, позволяет роботизированной жизненной форме 20 «слышать» команды, определять направление звука и распознавать и узнавать голос. Передний громкоговоритель 130, присоединенный к звуковому модулю 131 (фиг. 6), может быть расположен в пасти 30.
Со ссылкой на фиг. 1-6, все из датчиков выдают входные инициирующие сигналы 200 в программный модуль 202 искусственного интеллекта (AI) (фиг. 3), который приводится в исполнение микропроцессорным блоком 206 управления (MCU) (фиг. 6). Входные инициирующие сигналы обрабатываются на 208 (фиг. 5), где входные сигналы преобразуются и масштабируются для модуля 210 AI.
Полученное в результате временное действие каждого из входных значений может масштабироваться согласно зависимости 212 входного сигнала и индекса возбуждения. Индексы возбуждения AI в момент t времени обновляются на этапе 214. Индексы в момент t времени сравниваются, чтобы определить преобладающие индексы возбуждения (DDI) согласно критериям 216 приоритета по выходным переменным 218 и эксплуатационным индексам 220 (фиг. 3). Соответствующие файлы анимации извлекаются, и упорядоченные DDI извлекаются на этапе 220. Затем, преобладающие файлы анимации для DDI1-N экспортируются в приводную систему 228 (фиг. 5). Если временное перекрытие, которое является временным интервалом между внешними инициирующими сигналами 224, не истекло, 226, выходная система 228 привода выдает надлежащие сигналы на контроллеры электродвигателей, приводы и громкоговорители 230. Если временное перекрытие истекло, 232, анимация сна или отдыха, 234, выдается в выходную приводную систему 228.
Модель 216 индивидуальности управляет всеми входными инициирующими событиями 210 (фиг. 3) с комбинацией всех связанных условий, эксплуатационного индекса 220, выходных переменных 218 и случайных переменных. Система 220 эксплуатационных индексов управляет поддержанием эксплуатационных индексов из выходных переменных 218, событий 238 и индексу 240 ДНК. Выходные переменные 218 находятся под влиянием эксплуатационного индекса 220, инициирующего сигнала 238 события и модели 216 индивидуальности.
Со ссылкой на фиг. 7, роботизированная жизненная форма 20 включает в себя врожденные атрибуты 300, например, такие как пол 302, активность 304, характер 306, повиновение 308, тембр 310, шумность 312 и смышленость 314. Пол 302 может быть мужским, женским или бесполым. Атрибут 304 активности находится в диапазоне от шустрого до нормального к спокойному. Атрибут 306 характера находится в диапазоне от плохого к нормальному до хорошего. Атрибут 308 повиновения находится в диапазоне от упрямого до нормального к послушному. Атрибут 310 тембра находится в диапазоне от низкого до нормального к высокому. Атрибут 312 шумности находится в диапазоне от тихого до нормального к шумному. Атрибут 314 смышлености находится в диапазоне от несообразительного до нормального к сообразительному.
Каждый из этих врожденных атрибутов 300 может находиться под влиянием одного или более других врожденных атрибутов. Например, если атрибут 302 пола имеет значение «мужской», средние типичные соответствующие врожденные атрибуты 300 могут включать в себя атрибут 304 активности «шустрый», атрибут 306 характера «плохой», атрибут 308 повиновения «упрямый», атрибут 310 тембра «низкий», атрибут 312 шумности «шумный» и атрибут 314 смышлености «несообразительный». Если атрибут 302 пола имеет значение «женский», типичные соответствующие врожденные атрибуты 300 могут быть атрибутом 304 активности «спокойный», атрибутом 306 характера «хороший», атрибутом 308 повиновения «послушный», атрибутом 310 тембра «высокий», атрибутом 312 шумности «тихий» и атрибутом 314 смышлености «сообразительный».
Хотя каждый из врожденных атрибутов описан выше в качестве имеющего диапазон из трех значений, должно быть понятно, что диапазон может иметь значение дискретных объемов и приращений или может быть непрерывным. Индекс ДНК изложен на фиг. 7A.
Врожденные значения 300, изначально установленные для конкретной роботизированной жизненной формы 20, могут быть основаны на колоколообразной кривой, настроенной согласно атрибуту 302 пола. Например, если атрибут 302 пола является бесполым, то центр колоколообразных кривых может изначально устанавливаться на центр или нормальное значение для каждого врожденного атрибута 300. Некоторые или все врожденные атрибуты 300 могут произвольно настраиваться и устанавливаться для ограничения предсказуемости поведения роботизированной жизненной формы 20. Если атрибут 302 пола установлен в женский, то центр колоколооразных кривых изначально может устанавливаться в значение между нормальным значением и внешним пределом для атрибута женского типа. Например, среднее значение для атрибута 304 активности для женского пола может находиться между нормальным и спокойным. Срединное значение или атрибут 310 тембра могут быть нормальным и высоким. Посредством применения случайно сформированной настройки к каждому из значений врожденных атрибутов 300, каждая роботизированная жизненная форма 20 начинает со своих собственных установленных атрибутов, которые делают ее отличной от других роботизированных жизненных форм. Например, одна женская роботизированная жизненная форма может иметь все из своих значений врожденных атрибутов 300 в пределах одного среднеквадратического отклонения от срединного значения, в то время как другая женская роботизированная жизненная форма может иметь значение атрибута 310 тембра, установленное в значение на нижней стороне шкалы, два или более среднеквадратических отклонений от срединного значения для всех женских роботизированных жизненных форм.
Со ссылкой на фиг. 7-9, роботизированная жизненная форма 20 может включать в себя пять неврожденных атрибутов 320, в том числе настроение 322, физическое состояние 324, питание 326, здоровье 328 и эмоции 330. Эти неврожденные атрибуты 320, также указываемые ссылкой как индексы возбуждения, включены в систему AI, чтобы определять физическое состояние и социальное поведение роботизированной жизненной формы. Эти неврожденные атрибуты 320 могут находиться под влиянием врожденных атрибутов 300 и благодаря взаимодействию с ее окружающей средой.
Атрибут 322 настроения меняется от очень грустного до нормального к очень веселому. Подобно реальным питомцам, атрибут 322 настроения может подвергаться отрицательному влиянию со временем, если его бьют или ругают. Атрибут 322 настроения может подвергаться положительному влиянию со временем, например, если с ним играют, его ласкают или он питается кормом, который ему нравится. Роботизированная жизненная форма 20 может показывать или демонстрировать свое настроение посредством языка тела и звука. Атрибут 322 настроения может оказывать влияние на атрибут 308 повиновения и атрибут 304 активности, например, демонстрируемые ее готовностью реагировать на голосовые команды и участвовать в играх.
Атрибут 324 физического состояния может находиться в диапазоне от очень изнуренного или сонного до нормального к очень энергичному. Атрибут 324 физического состояния может меняться со временем, с более высоким уровнем энергии утром после полной ночи сна, убывая в течение дня до ощущения изнурения ночью перед временем ложиться спать. Другими факторами, которые могут оказывать влияние на уровень энергии, являются временная продолжительность для активного движения, например, такого как участие в игре, и время после последнего приема корма или пропущенного приема корма, которые могут снижать значение атрибута 324 физического состояния. Уровень энергии, например, может повышаться сном, отдыхом, надлежащим питанием и питанием энергетическими кормами. Физическое состояние может показываться или демонстрироваться роботизированной жизненной формой 20 посредством ее языка тела, такого как быстрые энергичные движения против медленных и тяжелых движений, или посредством ее готовности реагировать на команды и другие взаимодействия и внешние раздражители.
Атрибут 326 питания может находиться в диапазоне от очень голодного (то есть, пропущенных трех или более приемов корма подряд) до полного к перекормленному и пресыщенному. Атрибут 326 питания изменяется со временем и находится под влиянием количества и типа корма «потребленного» роботизированной жизненной формой 20. Если пропущены один или более приемов корма, атрибут 326 питания может уменьшаться, что может оказывать влияние на атрибут 322 настроения, атрибут 324 физического состояния и атрибут 328 здоровья. Если слишком много корма выдано роботизированной жизненной форме 20, если питается между нормальными моментами времени питания, или она питается нездоровыми кормами, атрибут питания может увеличиваться, оказывая влияние на атрибут 324 физического состояния и атрибут 328 здоровья.
Атрибут 328 здоровья может находиться в диапазоне от очень болезненного/травмированного до нормального к очень здоровому. Атрибут 328 здоровья может резко изменяться от здорового до травмированного, например, если робота 20 уронили с высоты. В травмированном состоянии роботизированная жизненная форма 20 может быть неспособной ходить или прихрамывать на травмированной ноге(ах). Кроме того, местоположение травмы может оказывать влияние на его движение, такое как травма стопы, колена, плеча или спины. Физическая травма может оказывать влияние на желание роботизированной жизненной формы двигаться, играть, реагировать на команды, атрибут 322 настроения и атрибут 324 физического состояния. Атрибут 328 здоровья может подвергаться отрицательному влиянию температуры (слишком жаркой или слишком холодной), или если роботизированная жизненная форма 20 питается слишком большим количеством корма, слишком суррогатным кормом, горячим кормом, или пропущенного приема корма. Если атрибут 328 здоровья находится ниже нормального, могут поражаться другие атрибуты, такие как физическое состояние 324, настроение 322, активность 304 и повиновение 308. Питание роботизированной жизненной формы 20 травой и ласкание роботизированной жизненной формы 20 может повышать атрибут 328 здоровья со временем. Роботизированная жизненная форма 20 в от нормального до очень здорового состоянии будет нормально действовать, причем ее поведение определяется другими атрибутами.
Атрибут 330 эмоций может находиться в диапазоне от очень испуганного/рассерженного до невозмутимого к очень возбужденному. Атрибут 330 эмоций может подвергаться отрицательному влиянию падением роботизированной жизненной формы 20, например, удерживанием ее вниз головой или за ее хвост 36, или содержанием ее в темноте в дневное время. Ее реакция страха или ярости, например, может находиться под влиянием атрибута 302 пола, атрибута 306 характера, атрибута 322 настроения и атрибута 324 физического состояния. Наряду с игрой с роботизированной жизненной формой 20 посредством покачивания ее, подбрасыванием и ловлей ее, или посредством ее кормления острым кормом, атрибут 330 эмоций может подвергаться положительному влиянию, как продемонстрировано ее уровнем возбуждения. Атрибут 330 эмоций может оказывать влияние на поведение роботизированной жизненной формы в большой степени, которая демонстрируется языком ее тела и звуковым выводом. Атрибут 330 эмоций до некоторой степени может оказывать влияние на каждый из других атрибутов 300 и 320.
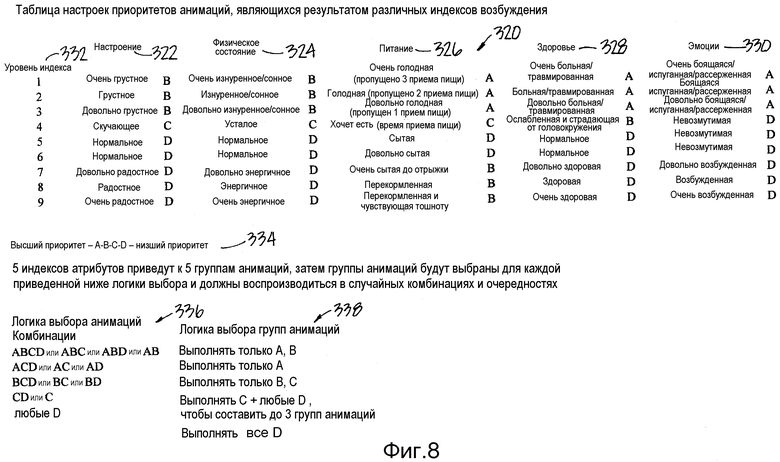
Для каждого неврожденного атрибута 320 уровень 332 индекса (фиг. 8) является парным с приоритетом 334 для конкретного атрибута. Как проиллюстрировано, уровень индекса находится в диапазоне с 1 до 9, а приоритет находится в диапазоне от A до D, причем, A является высшим приоритетом, а D является низшим приоритетом. В целом, чем ниже индекс 332, тем более отрицателен ассоциативно связанный атрибут, и чем выше индекс 332, тем положительнее ассоциативно связанный атрибут. Однако, приоритет 334, ассоциативно связанный с конкретным атрибутом 320, может назначаться на основании интенсивности уровня атрибута и взаимного влияния или зависимости с другими атрибутами.
В любой конкретный момент времени уровень 332 индекса считывается для каждого из неврожденных атрибутов 320 и ассоциативно связанного приоритета для конкретного неврожденного атрибута 320, чтобы определять комбинацию группы 336 анимаций. Например, если индекс атрибута 322 настроения имеет значение 5, а атрибут физического состояния имеет значение 4, и индекс атрибута 326 питания имеет значение 3, а атрибут 328 здоровья имеет значение 3, и индекс атрибута 330 эмоций имеет значение 6, комбинацией является DCAAD, или, переупорядоченная по приоритету AACDD. В этом примере только анимации, ассоциативно связанные с атрибутом 326 питания и атрибутом 328 здоровья, будут выбираться из логики 338 выбора группы анимаций. На основании логики 338 выбора все анимации приоритетов A и B выбираются и воспроизводятся раньше анимаций приоритета C и D. Как только выбрана последовательность анимаций, они воспроизводятся в случайных сочетаниях и очередности.
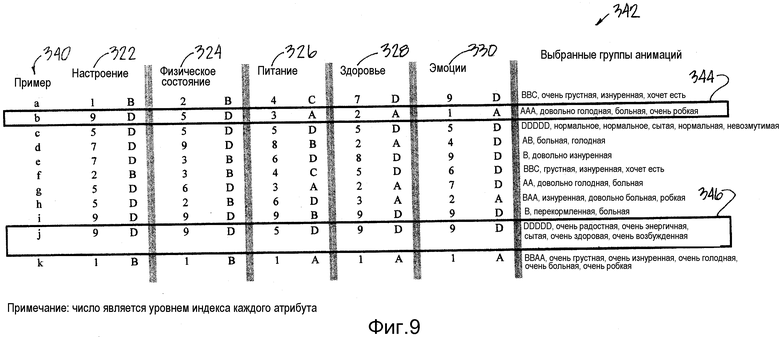
Как проиллюстрировано на фиг. 9, предоставлен ряд примеров 340 наряду с выбранными группами 342 анимаций. В примере «344» индекс атрибута 322 настроения имеет значение 9, индекс атрибута 324 физического состояния имеет значение 5, индекс атрибута 326 питания имеет значение 3, индекс атрибута 328 здоровья имеет значение 2, и индекс атрибута 330 эмоций имеет значение 1. Получающиеся в результате выбранные группы анимаций, 342, имеют значение AAA, соответствующее довольно голодному, удрученному и очень испуганному. В примере «j» 346, индекс атрибута 322 настроения имеет значение 9, индекс атрибута 324 физического состояния имеет значение 9, индекс атрибута 326 питания имеет значение 5, индекс атрибута 328 здоровья имеет значение 9, и индекс атрибута 330 эмоций имеет значение 9. Получающиеся в результате выбранные группы анимаций, 342, имеют значение DDDDD, соответствующее очень довольному, очень энергичному, сытому, очень здоровому и очень возбужденному. Другие примеры показаны на фиг. 11. Должно быть понятно, что комбинация индексов и соответствующих групп анимаций не ограничена проиллюстрированными примерами. В зависимости от количества индексов, количества атрибутов и количества уровней приоритета, комбинация групп анимаций может быть практически неограниченной, с дополнительной вариацией случайного порядка активизации конкретного атрибута из выбранной группы анимаций.
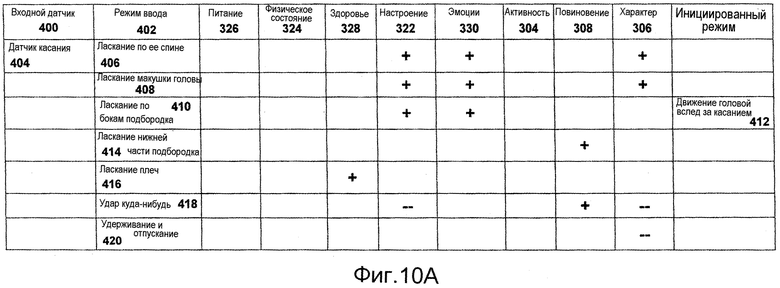
Со ссылкой на фиг. 5-9 и 10A-10K, внешние датчики 400, по отдельности идентифицированные на фиг. 4 (например, 42, 44, 48, и т. д.), обеспечивают ввод в и выбор различных режимов 402 ввода. Режимы 402 ввода оказывают влияние на различные врожденные атрибуты 300, а также неврожденные атрибуты 320. Например, датчики 404 касания инициируют некоторое количество разных режимов ввода в зависимости от конкретного затронутого датчика касания, последовательности приведения в действие датчиков касания и силы касания. Если датчики 48 касания затрагиваются в последовательности от шеи 32 к хвосту 36, выбранным режимом ввода является ласкание по ее спине 406. Ласкание роботизированной жизненной формы 20 по ее спине 50 и инициирование режима 406 ввода оказывает положительное влияние на атрибут 322 настроения, атрибут 330 эмоций и атрибут 306 характера. Если индекс 322 настроения имел значение 6, он может приращиваться, например, до 7, хотя не обязательно сразу. Режиму 406 ввода ласкания по ее спине может быть необходимым активизироваться на период времени, чтобы один или более из индексов были постепенно увеличивающимися. Дополнительно, находящиеся под влиянием индексы атрибутов могут быть постепенно увеличивающимися с разными интервалами. Например, атрибут 330 эмоций может приращиваться быстрее, чем атрибут 322 настроения.
Если макушка головы 22 подвергается ласканию посредством касания датчика 42, выбирается режим ввода ласкания макушки 408 головы, например, оказывающий положительное влияние на атрибут 322 настроения, атрибут 330 эмоций и атрибут 306 характера.
Если датчик 44 касания щек либо датчик 46 касания подбородка подвергаются касанию, например, инициируется режим ввода ласкания боковых щек 410, который положительно влияет на атрибут 322 настроения и атрибут 330 эмоций. Инициируется режим 412 движения головы вслед за касанием, который активизирует выходную приводную систему 228, чтобы приводить в действие сервопривод 88 головы и сервопривод 90 шеи, чтобы двигали голову по направлению к затрагиваемой стороне головы 22.
Если затрагивается датчик 46 касания подбородка, инициируется режим ввода ласкания ниже подбородка 414, положительно влияющий на атрибут 308 повиновения. Если затрагивается датчик 64 касания плеч, инициируется режим ввода ласкания плеч 416, положительно влияющий на атрибут 328 здоровья. Если роботизированная жизненная форма 20 ударяется где-либо 418, атрибут 322 настроения и атрибут 306 характера подвергаются отрицательному влиянию, но атрибут 308 повиновения подвергается положительному влиянию. В заключение, если датчики касания по любой стороне роботизированной жизненные формы подвергаются касанию и удерживаются, активизируется режим ввода 420 удерживания и отпускания, отрицательно влияющий на атрибут 306 характера. Должно быть понятно, что различные реакции на входной сигнал датчика касания предназначены только для иллюстративных целей и не ограничены конкретными реакциями, показанными и описанными.
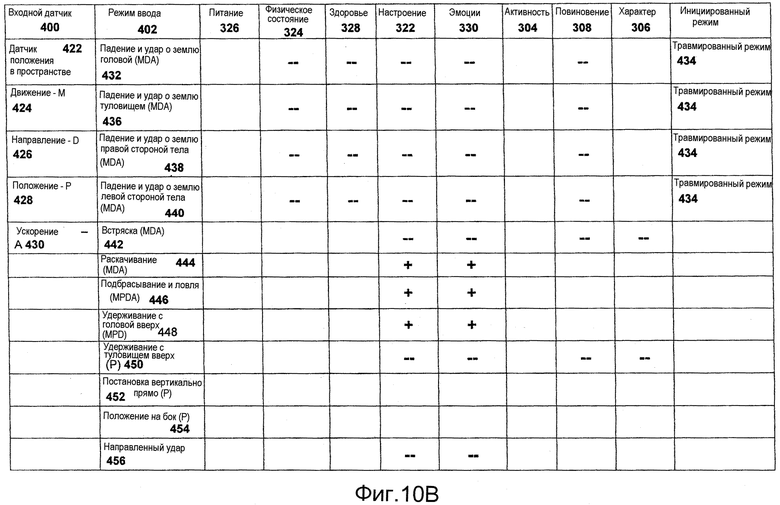
Возвращаясь к фиг. 10B, датчик 422 положения в пространстве (фиг. 6) обнаруживает движение 424 (M) направление 426 (D), положение 428 (P) и ускорение 430 (A). Если роботизированная жизненная форма 20 падает на свою голову 432, датчик 422 положения в пространстве обнаруживает движение 424, направление 426 и ускорение 430, а также входной сигнал датчика 42 касания головы, оказывая отрицательное влияние на атрибуты физического состояния 324, настроения 322, эмоций 330 и повиновения 308, немедленно снижая соответственные значения индексов. Дополнительно, инициируется обиженный режим 434.
Если роботизированная жизненная форма 20 падает и приземляется на сторону 436 своего хвоста, датчик 422 положения в пространстве обнаруживает движение 424, направление 426 и ускорение 430, а также входной сигнал от датчика 60 касания зада и датчика 62 касания хвоста, оказывая отрицательное влияние на атрибуты физического состояния 324, здоровья 328, настроения 322, эмоций 330 и повиновения 308. Ассоциативно связанные индексы для этих атрибутов немедленно подвергаются отрицательному приращению, и инициируется травмированный режим 434.
Если роботизированная жизненная форма 20 падает и приземляется на свой правый 438 или левый бок 440, датчик 422 перегрузки обнаруживает движение 424, направление 426 и ускорение 430, а также входной сигнал от датчиков касания туловища, расположенных на боках 52, груди 54, бедрах 58 и/или ногах 38 и 40. Атрибуты физического состояния 324, здоровья 328, настроения 322, эмоций 330 и повиновения 308 подвергаются отрицательному влиянию, дающему в результате немедленное отрицательное приращение ассоциативно связанных индексов для этих атрибутов, в таком случае инициируя травмированный режим 434. В зависимости от того, какие датчики касания активизируются, одна или более ног 38 или 40 могут травмироваться, давая в результате роботизированную жизненную форму 20, хромающую на одну или более ног.
Если роботизированная жизненная форма 20 встряхивается 442, датчик 422 положения в пространстве обнаруживает движение 424, направление 426 и ускорение 430, а также входной сигнал с датчиков касания туловища, отрицательно влияющие на атрибуты настроения 322, эмоций 330, повиновения 308 и характера 306. Величина и скорость, с которой могут подвергаться отрицательному приращению ассоциативно связанные индексы, например, могут меняться в зависимости от того, насколько сильны, и длительности встряски или сотрясения.
Если роботизированная жизненная форма 20 раскачивается 444 из стороны в сторону или взад и вперед, датчик 422 положения в пространстве обнаруживает движение 424, направление 426, положение 428 и ускорение 430, кроме того, обнаруживая входной сигнал с датчиков касания туловища, оказывая положительное влияние на атрибуты настроения 322 и эмоций 330 и вызывая приращение ассоциативно связанных индексов немедленно или со временем.
Если роботизированная жизненная форма 20 удерживается своей головой вверх 448, датчик 422 положения в пространстве обнаруживает движение 424, направление 426 и положение 428, а также входной сигнал с датчиков касания туловища, оказывая положительное влияние на атрибуты настроения 322 и эмоций 330. Результатом является приращение ассоциативно связанных индексов со временем.
Если роботизированная жизненная форма 20 удерживается за хвост 450, датчик 422 положения в пространстве обнаруживает положение 428, и входной сигнал также принимается с датчика 62 касания хвоста. Атрибуты настроения 322, эмоций 330, повиновения 308 и характера 306 подвергаются отрицательному влиянию, давая в результате отрицательное приращение ассоциативно связанных индексов.
Если роботизированная жизненная форма 20 является прямо стоящей 452 или лежащей на боку 454, датчик 422 положения в пространстве обнаруживает положение, а также входной сигнал с датчиков 72 и 74 касания ступней или датчиков касания туловища. В этих положениях, нет отрицательного или положительного вклада во врожденные 300 и неврожденные 320 атрибуты.
В заключение, если роботизированная жизненная форма 20 ударяется 456, сначала может приниматься входной сигнал датчика касания, сопровождаемый движением 424, направлением 426 и/или ускорением 430, обнаруживаемыми датчиком 422 положения в пространстве. Атрибуты настроения 322 и эмоций 330 могут подвергаться отрицательному влиянию, давая в результате немедленное отрицательное приращение ассоциативно связанных индексов.
Должно быть понятно, что режимы ввода, инициированные датчиком 422 положения в пространстве и датчиками касания, могут меняться согласно времени суток, температуре и другой комбинации событий. Например, если роботизированная жизненная форма 20 подбрасывается и ловится 446, но затем роняется, находящиеся под влиянием атрибуты могут переходить из положительных в отрицательные, инициируя травмированный режим 434. Однако, как только роботизированная жизненная форма 20 травмирована, например, ассоциативно связанные атрибуты могут не подвергаться положительному влиянию покачиванием 444 или подбрасыванием и поимкой 446, очень похоже на то, как животное или питомец не хотел бы играть, когда травмирован.
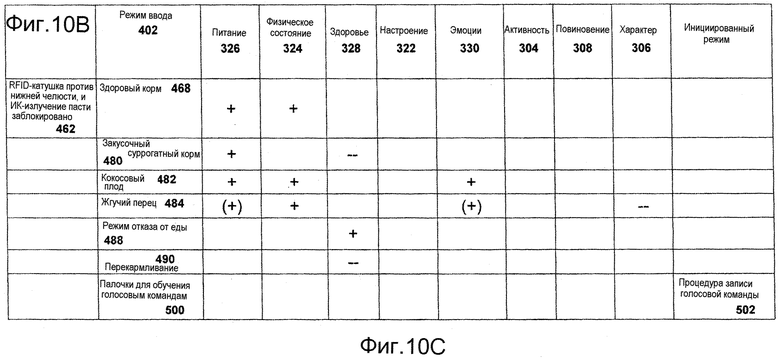
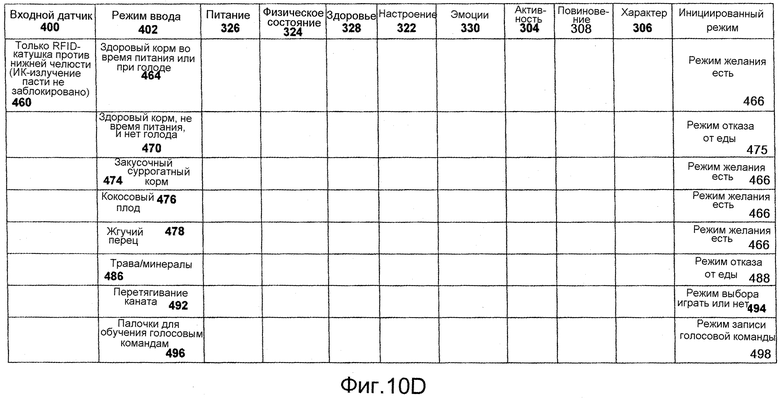
Входные сигналы с ИК-датчиков 122 в комбинации со считывателем 126 RFID инициируют режимы ввода, связанные с принятием корма, игрой и обучением, которые затем оказывают влияние на врожденные 300 и неврожденные 320 атрибуты. Когда считыватель 126 RFID обнаруживает присутствие RFID-метки 127, и ИК-датчики не блокированы, 460 (фиг. 10D), роботизированная жизненная форма 20 может реагировать по-другому, чем когда считыватель 126 RFID обнаруживает наличие RFID-метки, а ИК-датчики блокированы, 462 (фиг. 10C).
Например, если считыватель 126 RFID (фиг. 1, 4 и 6) обнаруживает RFID-метку здорового корма, когда имеет место время питания, или роботизированная жизненная форма голодна, 464 (фиг. 10D), и ИК-датчики 122 не блокированы, то инициируется режим 466 желания поесть. Если предложена RFID-метка здорового корма, 468 (фиг. 10C), которая обнаружена считывателем 126 RFID, и ИК-датчики 122 теперь блокированы 462, роботизированная жизненная форма 20 будет приводить в действие сервопривод 86 пасти, чтобы открывать свою пасть 30 и принимать RFID-метку здорового корма. Когда роботизированная жизненная форма 20 «ест» здоровый корм 468, атрибуты питания 326 и физического состояния 324 подвергаются положительному влиянию, приращивая ассоциативно связанные индексы. Если обнаружена RFID-метка здорового корма считывателем 126 RFID, но если не пришло время питания, или роботизированная жизненная форма 20 не голодна 470, и ИК-датчики 122 не блокированы 460, инициируется режим 475 отказа от еды. Если предложена RFID-метка здорового корма, которая обнаружена считывателем 126 RFID, и ИК-датчики 122 теперь блокированы, 462, роботизированная жизненная форма 20 будет активизировать сервопривод 90 шеи, чтобы отворачивать свою голову 22 от корма, удерживая свою пасть 30 закрытой.
Если считыватель 126 RFID обнаруживает RFID-метку закусочного суррогатного корма, 474 (фиг. 10D), RFID-метку фруктов, 476, или RFID-метку острого корма, такую как RFID-метка 478 жгучего перца, и ИК-датчики 122 не блокированы 460, инициируется режим 466 желания есть. Если ИК-датчики 122 блокированы, и считыватель 126 RFID обнаруживает закусочный суррогатный корм 480, фрукты 482 или острый корм 484 (фиг. 10C), роботизированная жизненная форма 20 будет приводить в действие сервопривод 86 пасти, чтобы открывать пасть 30 для приема корма. Любые из этих видов корма будут приращивать индекс атрибута 326 питания. Однако, суррогатный корм 480 также может оказывать отрицательное влияние на атрибут 328 здоровья, уменьшая соответственный индекс. Фрукты 482 и острый корм 484 будут оказывать положительное влияние на атрибуты физического состояния 324 эмоций 330, приращивая ассоциативно связанные индексы. Но острый корм 484 также может снижать индекс атрибута 306 характера.
Если RFID-метки 486 травы или минералов предложены роботизированной жизненной форме 20, и ИК-датчики не блокированы, 460, инициируется режим 488 отказа от еды (фиг. 10D). Если предложены трава или минералы 486, и ИК-датчики заблокированы, 462 (фиг. 10C), если роботизированная жизненная форма 20 не находится в травмированном режиме 434, она не будет открывать свою пасть 30 и будет отворачивать свою голову 22 от травы или минералов 486. Если она находится в травмированном режиме 434 (фиг. 10B), когда предложена трава или минералы 486, она не будет отворачивать свою голову 22, но также может не открывать свою пасть 30 незамедлительно. После представления травы или минералов 486 роботизированной жизненной форме 20, когда она находится в травмированном режиме 434, она может активизировать свои сервоприводы 86 для открывания своей пасти 30. Когда датчик 126 RFID обнаруживает RFID-метку травы или минералов, 488, индекс атрибута 328 здоровья может подвергаться приращению. Если роботизированная жизненная форма 20 принуждается есть или перекармливается, 490, когда она сыта, или посредством принудительного открывания ее пасти 30 и помещения RFID-метки корма в ее пасть 30, которая обнаруживается считывателем 126 RFID, атрибут 328 здоровья подвергается отрицательному влиянию, и ассоциативно связанный индекс подвергается отрицательному приращению. Если трава или минералы 488 принудительно скармливаются роботизированной жизненной форме 20, она затем может вести себя нездоровой в пределах инициирования действия или реакции рвоты.
Если игрушка 492 для игры, такой как перетягивание каната, обнаружена считывателем 126 RFID, и ИК-датчики 122 не блокированы 460, сервопривод 86 пасти будет приводиться в действие для открывания пасти 30, если роботизированная жизненная форма 20 желает поиграть, 494 (фиг. 10D). Если она не хочет играть, сервопривод 86 пасти не будет приводиться в действие для открывания пасти 30.
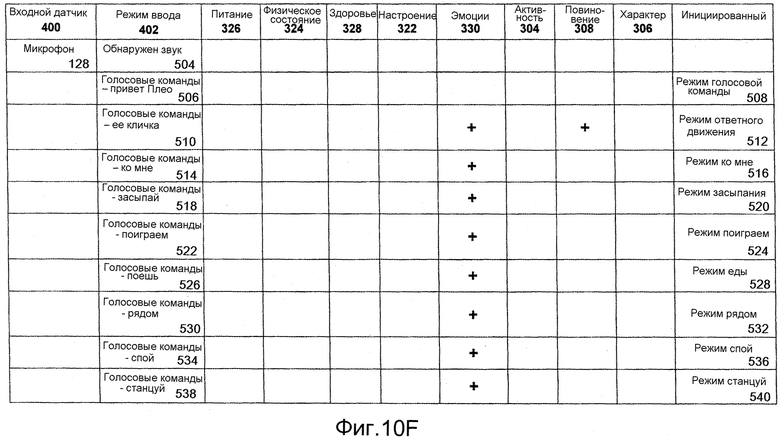
Если RFID-метка 496 палочки для обучения (фиг. 10D) обнаружена считывателем 126 RFID, и ИК-датчики 122 не блокированы, 460, может инициироваться режим 498 записи голосовой команды, который может указываться приведением в действие сервоприводов 118 и 120 хвоста 36, и сервоприводов 88 и 90 головы и шеи соответственно. Если палочка 496 для обучения обнаружена считывателем 126 RFID, когда ИК-датчик заблокирован, 462, сервопривод 86 пасти приводится в действие для открывания пасти 30. Если палочка 500 для обучения помещена в пасть 30, как обнаружено считывателем 126 RFID, пасть 30 закрывается посредством реверсирования сервопривода 86 пасти, чтобы принять палочку 500 для обучения, и инициируется процедура 502 записи голосовой команды. В процедуре 502 записи голосовой команды, микрофон 128 принимает команды, например, такие как «привет», кличка роботизированной жизненной формы, «ко мне», «засыпай», «поиграем», «поешь», «рядом», «спой» и «станцуй», которые обрабатываются модулем 129 распознавания голоса (фиг. 6). Другие команды могут учитываться или заучиваться роботизированной жизненной формой 20. Посредством повторения команды, роботизированная жизненная форма 20 «заучивает» команду. Если обнаружен звук, 504, и принятой командой является «привет» 506 (фиг. 10F), инициируется режим 508 голосовой команды, в котором роботизированная жизненная форма 20 слушает другие команды. Если принята кличка роботизированной жизненные формы 510, индексы атрибута 330 эмоций и атрибута 308 повиновения подвергаются приращению, и инициируется режим 512 ответного движения. Как только инициирован режим 512 ответного движения, соблюдаются другие принятые команды. Если режим 512 ответного движения не инициирован посредством приема клички 510 питомца до приема другой из команд, ответ на команду может выводиться или может не выводиться в зависимости от врожденных атрибутов 300 и текущего состояния других неврожденных атрибутов 320 в это время.
Если принята команда «ко мне», 514 (фиг. 10F), то индекс атрибута 330 эмоций подвергается превращению, и инициируется режим «ко мне». В режиме 516 «ко мне», роботизированная жизненная форма 20, с использованием стереомикрофонов 128 на каждой стороне головы 22, перемещается по направлению к источнику команды, а затем, останавливается для ожидания другой команды.
Если принята команда «засыпай», 518, то индекс атрибута 330 эмоций приращивается, и инициируется режим 520 «засыпай». В режиме 520 «засыпай» роботизированная жизненная форма 20 будет засыпать по команде, если она находится в уставшем состоянии 324 атрибута физического состояния. Иначе, она может ложиться, но может засыпать или не засыпать.
Если принята команда «давай поиграем», 522, то индекс атрибута 330 эмоций приращивается, и инициируется режим 524 «давай поиграем». В режиме 524 «давай поиграем» роботизированная жизненная форма 20 может проявлять интерес к игре или становится более активной или возбужденной.
Если принята команда «рядом», 530, то индекс атрибута 330 эмоций приращивается, и инициируется режим 532 «рядом». В режиме 532 «рядом» роботизированная жизненная форма 20 будет следовать за источником команды до тех пор, пока звуки не принимаются в течение предопределенного периода времени, или до тех пор, пока не начат другой режим. Если принята команда «спой», 534, то индекс атрибута 330 эмоций приращивается, и инициируется режим 536 «спой». В режиме 536 «спой» роботизированная жизненная форма 20 может производить музыкальные звуки через громкоговоритель 130.
Если принята команда «станцуй», 538, то индекс атрибута 330 эмоций приращивается, и инициируется режим 540 «станцуй». В режиме 540 танца роботизированная жизненная форма 20 может танцевать под ритм музыки, которую она принимает через микрофон 128.
Все из голосовых команд и реакций на них взаимосвязаны с состоянием врожденных атрибутов 300 и неврожденных атрибутов 320, а также другими режимами. Например, если голосовая команда еще не была заучена при первом инициировании процедуры 502 записи голосовой команды, то режим, ассоциативно связанный с такой командой, не может инициироваться, так как роботизированная жизненная форма 20 еще не знает и не понимает команду. Подобным образом, если роботизированная жизненная форма 20 находится в травмированном режиме 434, то, например, она не будет реагировать на команды «поиграем» 522 или «станцуй» 538. Или если атрибут 324 физического состояния имеет значение изнуренное или очень изнуренное, команда «ко мне» 514, например, может выполняться только частично.
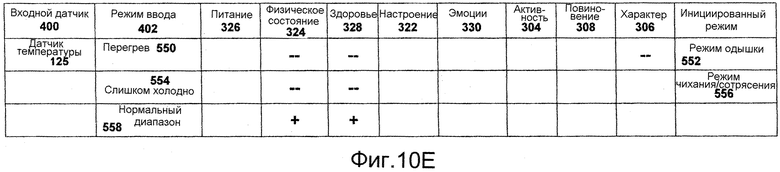
Датчик 125 температуры (фиг. 6) измеряет температуру окружающей среды. Нормальный рабочий диапазон, например, может быть приблизительно от 50°F (10°C) до 104°F (40°C). В зависимости от жизненной формы, ее диапазон может значительно меняться. Если температура находится около или выше верхней температуры, инициируется режим ввода перегрева 550 (фиг. 10E), оказывая отрицательное влияние на атрибут 324 физического состояния и атрибут 328 здоровья, а также атрибут 306 характера, давая в результате снижение ассоциативно связанных индексов со временем и инициируя режим 552 одышки. В режиме одышки пасть 30 роботизированной жизненной формы открывается сервоприводом 86 пасти и звук одышки издается динамиком 130. Если температура находится около или ниже нижней температуры, инициируется режим ввода слишком холодного 554, оказывая отрицательное «влияние» на атрибуты физического состояния 324 и здоровья 328, уменьшая ассоциативно связанные индексы. Инициируется режим 556 чиханья/сотрясения, вызывая действие чиханья посредством движения сервоприводов головы 88 и шеи 89 и производя звук «чиханья» из громкоговорителя 130 наряду с открыванием пасти 30. Сотрясение, например, выполняется быстрым колебанием одного из сервоприводов 86, 88, 89, 98, 100, 108, 110, 112, 116, 118 и/или 120, и созданием звука «сотрясения» из громкоговорителя 130.
Камера 124, расположенная на носу 26, обнаруживает уровни освещения и движение. Если режим ввода света в дневное время 560 (фиг. 10G) инициирован освещением, обнаруженным камерой 124, выше предопределенного порогового значения, в течение дневного периода, атрибут 330 эмоций подвергается положительному влиянию, ассоциативно связанный индекс периодически приращивается. Дневной период, например, может быть от 8 часов утра до 10 часов вечера, с соответствующим ночным периодом с 10 часов вечера до 8 часов утра. Если окружающее освещение падает ниже предопределенного порогового значения в течение дневного периода, режим ввода темноты в дневное время 562 инициируется, оказывая отрицательное влияние на атрибут 330 эмоций и ассоциативно связанный индекс, давая в результате инициированный режим 564 покоя. В режиме 564 покоя, роботизированная жизненная форма 20, например, может укладывать свою голову 22 и/или закрывать свои глаза 28. Режим ввода темноты в дневное время 562 также может оказывать отрицательное влияние на атрибуты активности 304 и настроения 322.
Если окружающее освещение, обнаруженное камерой 124, находится выше предопределенного порогового значения ночью, например, может инициироваться режим ввода света в ночное время 566, отрицательно влияя на атрибут 330 эмоций, а также атрибуты настроения 322 и характера 306. Может инициироваться тревожный режим 568, например, в котором роботизированная жизненная форма 20 может проявлять дезориентацию, волнение и/или нереагирующее поведение.
Если окружающее освещение, обнаруженное камерой 124 находится ниже предопределенного уровня ночью, режим ввода темного ночного времени 570 может инициироваться, оказывая положительное влияние на атрибут 330 эмоций, отрицательно влияя на атрибут 304 активности и вызывая режим 572 сна. В режиме 572 сна, например, роботизированная жизненная форма 20 может подергивать, двигать одной или более ног 38 и 40, своей головой 22, шеей 32 и/или хвостом 36 и может переворачиваться или менять положения сна. Пороговое значение уровня освещения может меняться согласно времени дня. Например, пороговое значение может циклически изменяться от низкого значения, соответствующего самому темному времени ночи около 3 часов утра, возрастая до высокого значения, соответствующего самого яркого времени дня около 1 часа дня, затем, вновь снижаясь до низкого значения.
Если камера 124 обнаруживает перемещение объекта, может инициироваться режим ввода движущегося объекта 574, инициируя режим 576 слежения головой, в котором приводы головы 88 и шеи 89 приводятся в движение для отслеживания или сопровождения движущегося объекта.
Носовые ИК-датчики 122 выявляют присутствие объекта, такого как корм перед роботизированной жизненной формой 20, а также другие препятствия и границы. Если ИК-датчики 122 обнаруживают объект перед роботизированной жизненной формой 20, который не имеет RFID-метки, распознаваемой считывателем 126 RFID, режим ввода переднего препятствия 578 может инициироваться, давая в результате инициирование обратного/поворотного режима 580 (фиг. 10H). В обратном/поворотном режиме 580 роботизированная жизненная форма 20 может случайным образом поворачивать влево или вправо, отходить назад, а затем, поворачивать влево или вправо, чтобы избежать обнаруженного объекта.
Если ИК-датчики 122 выявляют границу, например, такую как край стола или край ступеньки, режим ввода обнаружения крутого склона, 582, может инициироваться, вызывая инициирование режима 584 отхода назад. В режиме 584 отхода назад, роботизированная жизненная форма 20 может останавливаться и отступать от обнаруженной границы, а затем поворачивать влево или вправо, чтобы сторониться границы.
Часы 600 реального времени начинают работу с начального включения питания роботизированной жизненной формы 20 и продолжают идти в фоновом режиме, выдавая временные интервалы для внутренних тактовых сигналов и инициирующих сигналов, таких как режим 560 ввода света в дневное время. Дополнительно, часы 600 реального времени инициируют изменения периодов жизни каждые три года 602 робота, которые инициируют возрастной режим 604 (фиг. 10I). Режим 604 возраста, например, может включать в себя периоды жизни, такие как новорожденный, юный, зрелый и пожилой. В первый период жизни роботизированная жизненная форма 20 сначала открывает свои глаза 28 и начинает адаптироваться к своей окружающей среде благодаря ее датчикам 404 касания, микрофонам 128, ИК-датчикам 122, камере 128, датчику 422 положения в пространстве и датчику 125 температуры, а также ее врожденным атрибутам 300. Во время первого периода роботизированная жизненная форма 20 начинает взаимодействовать со своей окружающей средой, демонстрируя основные поведения, например, такие как стоячее положение, ходьба, голод и любознательность. Роботизированная жизненная форма 20 может охватываться дремотой в течение дня во время первого периода.
Во втором периоде роботизированная жизненная форма 20 может проявлять большую любознательность, интерес и способность заучивать команды, становиться более игривой и демонстрировать до некоторой степени непредсказуемое поведение и характер. В третьем периоде роботизированная жизненная форма 20 может демонстрировать продолжительное обучение и воспитание посредством взаимодействий. Уникальная и распознаваемая индивидуальность, индивидуальные нрав и поведение могут развиваться так же, как полный диапазон движений тела и социальных поведений.
В четвертом периоде роботизированная жизненная форма 20 может проявлять признаки старения, например, такие как, не настолько активное существование, более медленные и менее координированные движения, склонность легче заболевать, повышенная чувствительность к колебаниям температуры и требование большего сна или дремоты. На протяжении всех периодов своей жизни «голос» роботизированной жизненной формы может изменяться, так же как его «слух» и «зрение».
Через равные промежутки времени на основании часов 600 реального времени инициируется режим 606 ввода пробуждения, который инициирует режим 608 пробуждения, чтобы пробуждать роботизированную жизненную форму 20 каждое утро в предписанное время или в разное время, на основании атрибутов физического состояния 324, здоровья 328 и настроения 322.
Датчик 610 напряжения аккумуляторной батареи контролирует уровень напряжения аккумуляторной батареи. Если напряжение аккумуляторной батареи падает ниже предопределенного уровня, инициируется режим 612 ввода низкого напряжения, который инициирует режим 614 отключения для отключения роботизированной жизненной формы 20. До тех пор пока уровень напряжения находится ниже предопределенного уровня, роботизированная жизненная форма 20 будет оставаться в состоянии отключения и не может включаться обратно.
Со ссылкой на фиг. 4, 6 и 12, микропроцессорный блок 206 управления включает в себя порты 620 ввода, которые принимают входные сигналы из модуля 129 распознавания голоса, который присоединен к микрофонам 128; датчика 422 положения в пространстве; процессора 43 датчиков касания, присоединенного к датчикам 41 касания; ИК-модуля 121, присоединенного к ИК-передатчикам/приемникам 122; модуля 128 камеры, присоединенного к камере 124; логического модуля 622; модуля/датчика 125 температуры; считывателя 126 и процессора 624 RFID; логики 626 проверки положения. На основании внешних входных сигналов 400, принятых через порты 620 ввода, индексы 332 возбуждения обновляются 628 на основании врожденных атрибутов 300, неврожденных атрибутов 320 и различных инициированных режимов 402 ввода. Индексы 336 возбуждения анимации выбираются 630 и приоритезируются, и группы анимации выбираются 328 из библиотечных файлов 632. Выбранные анимации отправляются в порты 634 вывода, которые выводятся в MCU 636 контроллера электродвигателя и звуковой модуль 131, присоединенный к громкоговорителю 130. Контроллеры 636 электродвигателей выдают специфичную управляющую информацию на выбранные сервоприводы 638 на основании выбранных анимаций, которые считываются шифратором 640 положений, ассоциативно связанным с каждым сервоприводом, отправляются в логику 626 проверки положения и подаются обратно в порты 620 ввода MCU 206. Эта информация о положении используется приводной логикой для определения текущей конфигурации роботизированной жизненной формы 20 и планирования следующего движения.
Со ссылкой на фиг. 4, 6 и 11 примерная логическая блок-схема последовательности операций способа для обработки входных сигналов датчиков в целом указана номером 650 ссылки. Входные сигналы датчиков принимаются портами 620 ввода MCU 206. Если принимается звуковой входной сигнал 652, MCU 206 определяет неподвижное/безмолвное состояние роботизированной жизненной формы 20. Если состояние является неподвижным и/или безмолвным 656, то определяется уровень звука, 658. Если уровень звука высок, 660, то выполняется испуганная анимация, 662, и атрибут 330 эмоции подвергается отрицательному влиянию. Если уровень шума не громок 664, анимация 666 обнаруженного звука выполняется посредством MCU 206. Если состояние не является неподвижным и/или безмолвным, 668, то MCU 206 определяет, является ли принятый звук звуковым кодом 670. Если обнаружен звуковой код, 672, то MCU 206 выполняет анимации, ассоциативно связанные с принятым звуковым кодом, 674. Если звуковой код не принят 676, то последовательность операций заканчивается.
Если ИК-датчик 122 пасти активизирован, то MCU 206 определяет, находится ли система в режиме участия в игре, таком как перетягивание каната, 678. Если инициирован режим 492 ввода перетягивания каната, 680, то инициируется режим 494 участия в игре. Если не в режиме 682 участия в игре, MCU 206 проверяет входной сигнал 684 процессора 624 RFID. Если обнаружена RFID-метка 127 объекта, 686, то ассоциативно связанная анимация выполняется, 688, посредством MCU 206. Если RFID-метка 127 объекта не обнаружена, 690, то ассоциативно связанная анимация поедания корма выполняется, 692, посредством MCU 206.
Если активизирован датчик ступни, 694, то ассоциативно связанная анимация опускания на землю, такое как ходьба или танец, 696, выполняется посредством MCU 206. Датчики ступней, например, могут быть переключателями 72 и 74 или могут быть ИК-датчиками для определения расстояния от объекта или поверхности.
Если входной сигнал датчика 422 положения в пространстве принимается портами 620 ввода MCU 206, ассоциативно связанные двигательные анимации 698 выполняются посредством MCU 206.
Со ссылкой на фиг. 12 примерная логическая блок-схема последовательности операций способа для модуля распознавания голоса в целом указана номером 700 ссылки. Микрофоны 128, расположенные по каждую сторону головы 22 роботизированной жизненной формы, принимают звуки, которые выдаются в модуль 129 распознавания голоса (фиг. 6). Модуль 129 распознавания голоса анализирует каждый входной сигнал с микрофонов 128 касательно специфичных речевых образов, таких как кличка 702 роботизированной жизненной формы, которая заучена и сохранена. Если проанализированный звуковой образ не совпадает с речевым образом 704 клички, последовательность операций возвращается в начало, чтобы анализировать следующий звуковой образ. Если проанализированный звуковой образ совпадает с речевым образом для клички 706 роботизированной формой жизни, то анализируется следующий звуковой образ 703. Если следующий звуковой образ не является действительной командой, 710, то выполняется анимация таймаута, 712, и последовательность возвращается, 714, для приема еще одного звукового образа 708. Если следующий звуковой образ не является действительной командой, 710, и анимация таймаута истекла 712, последовательность операций возвращается, 716, к началу 702. Если действительная команда 708 распознана, 718, то ассоциативно связанная анимация выбирается и выполняется, 720, и последовательность операций возвращается в начало.
Со ссылкой на фиг. 4, 6, 8, 10 и 13, блок-схема последовательности операций способа для модуля обработки корма в целом указана номером 750 ссылки. Считыватель 126 и процессор 624 RFID пассивно ожидают инициирующего сигнала RFID корма, 752. До тех пор, пока инициирующий сигнал RFID не обнаружен, 754, модуль 750 обработки корма остается в состоянии 752 ожидания. Если инициирующий сигнал RFID обнаружен, 756, RFID-код проверяется для определения типа обнаруженного корма, 758. Если обнаружена RFID-метка 760 необходимого для здоровья корма, 762, то проверяется значение индекса атрибута 326 корма, 764. Если индекс атрибута 326 корма является низким 766, например, находится между 1 и 3, которые имеют значение приоритета A, то инициируется анимация поедания, 768, где инициируется режим 464 ввода голода, инициирующий режим 466 желания есть. С RFID-меткой 760 здорового корма, обнаруженной считывателем 126 и процессором 624 RFID, режим 466 желания есть инициирует режим ввода здорового корма 468. Индексы как атрибута 326 питания, так и атрибута 324 физического состояния приращиваются, 768, и последовательность операций заканчивается 770.
Если индекс питания не является низким, 772, индекс атрибута 326 питания проверяется, чтобы определить, является ли он значением 4 индекса времени питания, 774. Если он имеет значение времени питания, 776, то инициируется анимация 768 поедания, как описано выше, и последовательность операций заканчивается, 770. Если он не имеет значения времени 778 питания, со здоровым кормом, инициируется режим 470 ввода не времени питания и не голодного, инициируя режим 472 отказа от еды и анимацию 780 без еды. Затем, последовательность операций заканчивается.
Если индекс питания не является низким, 772, индекс атрибута 326 питания проверяется, чтобы определить, является ли он значением 4 индекса времени питания, 774. Если он имеет значение времени питания, 776, то инициируется анимация 768 поедания, как описано выше, и последовательность операций заканчивается, 770. Если он не имеет значения времени 778 питания, со здоровым кормом, инициируется режим ввода 470 не времени питания и не голодного, инициируя режим 472 отказа от еды и анимацию 780 без еды. Затем последовательность операций заканчивается, 782.
Если обнаруженный тип корма, 758, является RFID-меткой 784 легкой закуски, выбирается тракт выбора легкой закуски, 786. Анимация 788 поедания инициируется в тех случаях, когда инициируется режим 474 ввода неблокированного ИК-излучением закусочного суррогатного корма, инициируя режим 466 желания есть, и инициируется режим ввода 480 блокированного ИК-излучением закусочного суррогатного корма. Индекс атрибута 326 питания приращивается наряду с тем, что индекс 320 атрибута здоровья подвергается отрицательному приращению. Затем, последовательность операций модуля обработки корма заканчивается, 790.
Если RFID-метка 792 с меньшей частью травы, 758, то выбирается тракт 794 обработки травы. Затем, считывается индекс атрибута 328 здоровья, 796. Если индекс атрибута 328 здоровья является низким, 798, например, имеющим значение индекса от 1 до 4, то выполняется анимация 800 поедания, где инициируется режим 486 ввода неблокированных ИК-излучением травы/минералов, в начале приводя к инициированию режима 488 отказа от еды. Так как индекс атрибута 328 здоровья является низким, если предложена RFID-метка 792 травы с блокированием ИК-датчиков 122, режим 488 ввода травы/минералов инициируется, с приращением индекса атрибута 328 здоровья. Затем, модуль обработки корма останавливается, 802. Если индекс атрибута 328 здоровья не является низким 804, инициируется анимация 780 без еды, и обработка заканчивается, 782.
Со ссылкой на фиг. 4, 6, 8, 10 и 14, блок-схема последовательности операций способа инициирующего сигнала касания в целом указана номером 850 ссылки. Процессор 43 касания ожидает входного сигнал 852 с любой из сенсорных площадок 41. Если не принято никаких входных сигналов, 854, последовательность 850 операций находится в состоянии ожидания. Если принят сенсорный входной сигнал, 856, процессор 43 определяет тип инициирующего сигнала по местоположению сигнала, последовательности и времени срабатывания для определения, является ли инициирующий сигнал ласканием, ударом или касанием, 858. Если инициирующий сигнал является касанием, 860, определяется датчик 404 касания для инициирования ассоциативно связанного режима 402 ввода. Например, если ласкание определено происходящим вдоль спины 50 роботизированной жизненной формы, инициируется режим 406 ввода питомца вдоль его спины, и индексы возбуждения настроения и индексы эмоционального возбуждения подвергаются положительному влиянию, 862. Инициируются ассоциативно связанные анимации, 864, и обработка заканчивается, 866.
Если инициирующий сигнал является ударом 868, режим 418 ввода удара куда-нибудь инициируется, оказывая отрицательное влияние на атрибуты настроения 322 и характера 306, причем атрибут 308 повиновения подвергается отрицательному влиянию, 870. Ассоциативно связанные анимации являются типичными, 872, и обработка заканчивается, 866.
Если инициирующий сигнал является касанием 874, ассоциативно связанные анимации соответствуют местоположению касания, 876. Обработка заканчивается, 866.
Роботизированная жизненная форма 20 по настоящему изобретению является автономным существом со сложной архитектурой программного обеспечения, которая дает роботизированной жизненной форме 20 возможность заучивать и понимать голосовые команды, выражать настроения и эмоции, реагировать на различные виды корма, иметь представление о времени - дне и ночи, воспринимать жару и холод, становиться уставшим, иметь кожную чувствительность, обладать ощущением ориентации и движения, реагировать на всю окружающую среду. Роботизированная жизненная форма 20 может ощущать и передавать эмоции, быть осознающей саму себя и взаимодействовать со своей окружающей средой, и обучаться и развивается со временем. Хотя роботизированная жизненная форма 20 в предпочтительном варианте осуществления изображена в качестве камаразавра, она не должна ограничиваться им. Роботизированная жизненная форма 20 может воплощать многие разные жизненные формы, какие-то прошлые или настоящие, какие-то полностью новые.
С роботизированной жизненной формой 20 следует обращаться осторожно, как с любым живым существом. Датчики 41 касания, покрывающие тело роботизированной жизненной формы, обнаруживают различные касания, которые могут оказывать влияние на поведение роботизированной жизненной формы 20.
Роботизированная жизненная форма 20 включает в себя источник питания в виде перезаряжаемой аккумуляторной батареи для питания MCU 106, схем и сервоприводов. Роботизированная жизненная форма 20 также включает в себя порт мини-USB и карту памяти микро-SD для обновлений программного обеспечения и обмена информацией с MCU 106, и синхронизации времени для настройки своего внутреннего времени на настоящее время.
Когда роботизированная жизненная форма 20 подвергается включению питания в первый раз, ей может потребоваться некоторое время, чтобы пробудиться и реагировать на свою окружающую среду. В качестве «новорожденной» роботизированной жизненной формы 20, она может спать дольше днем и быть нерасположенной играть или взаимодействовать во время часов сна. Это сонное поведение может продолжаться на протяжении ее новорожденного и пожилого периодов. В первые несколько дней «жизни», роботизированная жизненная форма 20 может открывать свои глаза, моргать и оглядываться вокруг в своей новой окружающей среде, потягиваться и издавать крик, и кричать, когда она голодна. К окончанию своего новорожденного периода, роботизированная жизненная форма 20 может предпринимать свои первые нетвердые и неуверенные детские шаги, начинать обследовать свою окружающую среду, получать более короткий сон и демонстрировать более широкий диапазон настроений и эмоций в ответ на взаимодействие со своей окружающей средой и владельцем.
Как только роботизированная жизненная форма 20 демонстрирует юное поведение, она может быть готова обучаться. Первым, что должна заучить роботизированная жизненная форма 20, является ее кличка. Чтобы заучить свою кличку, идентификационная карта с RFID-меткой может размещаться под подбородком 31 роботизированной жизненной формы, чтобы распознаваться считывателем 126 RFID. Как только распознана, роботизированная жизненная форма 20 может отображать поведение признательности, такое как виляние своим хвостом 36 и открывание своей пасти 30. Когда идентификационная карта помещена в пасть 30 роботизированной жизненной формы, она может закрывать свою пасть 30 и демонстрировать поведение одобрения, издавая довольные или радостные звуки, покачивая своей головой взад и вперед, затем, ожидая, чтобы услышать и заучить кличку, которую владелец выбрал для нее. Если выбранная кличка роботизированной жизненной формы произнесена громко и четко, роботизированная жизненная форма 20 может вилять своим хвостом, покачивать своей головой взад и вперед, а затем, выпускать идентификационную карту, чтобы указать, что она заучила свою кличку. Роботизированная жизненная форма 20 может быть переименована посредством повторения этой процедуры.
Роботизированная жизненная форма 20 может быть обучена слушать и запоминать голосовые команды. Одна или более обучающих RFID-меток могут использоваться, чтобы инициировать обучение роботизированной жизненной формы 20 для заучивания голосовых команд. RFID-метка обучения общего назначения может использоваться для инициирования изучения голосовых команд, или специальные RFID-метки могут использоваться для изучения специальных команд. Например, для обучения команде 514 «ко мне» и команды 522 «давай поиграем», может использоваться единственная RFID-метка, которая распознается считывателем 126 и процессором 624 RFID, чтобы инициировать процесс обучения. В качестве альтернативы, уникальная RFID-метка может использоваться для обучения каждой команде. Посредством использования уникальной RFID-метки для обучения специфичной команде, роботизированная жизненная форма 20 может обучаться предварительно запрограммированной команде на каком-нибудь языке. Посредством осуществления процесса обучения для специфичной команды и обучения такому звуковому образу для заучиваемой команды, голосовая команда может настраиваться управляться владельцем. Как только команда была заучена роботизированной жизненной формой 20, она может махать своим хвостом 36, действовать взволновано, покачивая своей головой 22 из стороны в сторону и выпускать заученную RFID-метку.
Чтобы роботизированная жизненная форма 20 выполняла голосовую команду, может быть необходимым сначала привлечь ее внимание посредством прослушивания ею своей клички. Когда роботизированная жизненная форма 20 слышит свою кличку, она может вставать неподвижно и посмотреть в направлении звука. В зависимости от значений индексов и значения индекса атрибута 308 повиновения, роботизированная жизненная форма 20 может реагировать на голосовую команду выполнением голосовой команды.
Роботизированная жизненная форма 20 использует входной сигнал своего датчика 422 положения в пространстве в комбинации со своими датчиками 41 касания и ножными переключателями 72 и 74 для определения ориентации и движения. Когда заняты один или более ножных переключателей 72 и/или 74, MCU 206 определяет, что роботизированная жизненная форма 20 находится в контакте с поверхностью. Кроме того, по мере того, как роботизированная жизненная форма 20 движется или ходит, обратная связь, принимаемая с шифратора 670 положения и логики проверки 626 положения, а также ножных переключателей 72 и 74, используется MCU 206 для определения положения и направления перемещения роботизированной жизненной формы 20. Функция датчика 428 положения у датчика 422 положения в пространстве выдает информацию об ориентации в MCU 206, которая используется с входным сигналом датчика 41 касания для определения, удерживается ли роботизированная жизненная форма 20 вверх своей головой 22 или вверх своим хвостом 36. Входной сигнал с датчика 62 касания хвоста и функция датчика 428 положения у датчика 422 положения в пространстве, могут использоваться MCU 206 для определения, что роботизированная жизненная форма 20 удерживается за хвост, с формированием надлежащей реакции, например, такой как отбивающееся движение и вой.
Качательное движение может выявляться функциями датчика 424 движения, датчика 430 ускорения и датчика 426 направления у датчика 422 положения в пространстве. Например, качательное движение выявляется, в то время как датчик 422 положения в пространстве обнаруживает движение главным образом в плоскости X или Z, или некоторой их комбинации, с некоторым отклонением по оси Y, предполагающим по существу горизонтальную дугу, положительное ускорение, сопровождаемое отрицательным ускорением, затем, резкое изменение направления на пиковом значении по оси Y. Качательное движение, вероятно, повторяется в течение периода времени, давая в результате приращение индексов атрибутов настроения 322 и эмоций 330. MCU 206 может вырабатывать реакцию, такую как виляние хвостом, довольный звук и удерживание головы 22 роботизированной формы жизни вверху.
Подобным образом, событие падения может выявляться датчиком 424 движения, датчиком 430 ускорения и датчиком 426 направления у датчика 422 положения в пространстве. Когда роботизированная жизненная форма 20 подвергается падению, датчик 422 положения в пространстве обнаруживает движение по оси Y в отрицательном направлении, и положительное ускорение, сопровождаемое резкой остановкой, и входные сигналы с различных датчиков 41 касания, активизируемые в зависимости от участков, ударяющихся о землю. Зависимость от амплитуды удара, определенной временем падения и активизируемые датчики 41 касания могут определять, травмирована ли роботизированная жизненная форма 20, и если так, насколько серьезно и в какой части(ях), или она только напугана. Падение роботизированной жизненной формы 20 может давать в результате отрицательное воздействие на атрибуты физического состояния 324, здоровья 328, настроения 322, эмоций 330 и повиновения 308. Внешняя реакция посредством MCU 206, например, может включать в себя подергивание тела, опущенную голову 22 и хвост 36, полуприкрытые глаза 28 и хныкающий звук для указания повреждения.
Должно быть понятно, что, несмотря на то что некоторые формы этого изобретения были проиллюстрированы и описаны, оно не ограничено ими кроме тех случаев, когда и в той мере, в какой такие ограничения включены в последующую формулу изобретения.








Изобретение относится к области робототехники. Технический результат - обеспечение повышения реакции робота на внешние входные сигналы. Роботизированная жизненная форма содержит: тело робота, сочлененное для движения вверх и вниз и из стороны в сторону и поддерживаемое передними и задними ногами, заканчивающимися соответственными ступнями, каждая из упомянутых ног имеет по меньшей мере два сустава, упомянутое тело имеет шею, заканчивающуюся головой, снабженной глазами и пастью; внутренние и внешние датчики ввода, расположенные на упомянутом теле робота, в том числе датчик касания головы, множество датчиков касания, распределенных по туловищу упомянутого тела, и множество датчиков касания на упомянутых ступнях; средство, реагирующее на упомянутые датчики, для определения уровней индексов возбуждения в соответствии с критериями приоритета, выбранными из множества групп неврожденных анимаций; и множество сервоприводов, ассоциативно связанных с упомянутым телом робота и реагирующих на преобладающие индексы возбуждения для побуждения робота выполнять анимации, являющиеся их результатом. 14 з.п. ф-лы, 25 ил.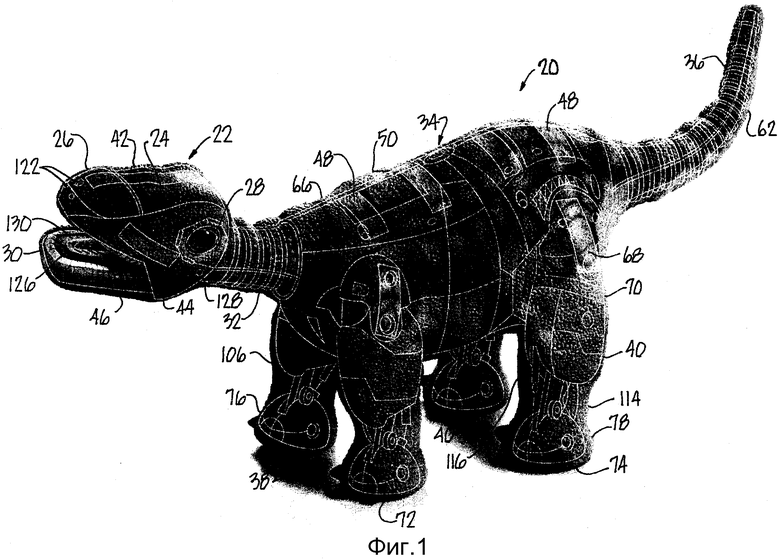
1. Роботизированная жизненная форма, реагирующая на меняющуюся окружающую среду, воспринимаемую упомянутым роботом, причем упомянутый робот содержит:
тело робота, имитирующее молодого камаразавра, сочлененное для движения вверх и вниз и из стороны в сторону и поддерживаемое передними и задними ногами, заканчивающимися соответственными ступнями, каждая из упомянутых ног имеет по меньшей мере два сустава, упомянутое тело имеет шею, заканчивающуюся головой, снабженной глазами и пастью,
внутренние и внешние датчики ввода, расположенные на упомянутом теле робота и чувствительные к касанию, звуку и условиям освещения, движению, корму, температуре, голосовым командам, времени суток, препятствиям и опасностям, в том числе датчик касания головы, множество датчиков касания, распределенных по туловищу упомянутого тела, и множество датчиков касания на упомянутых ступнях,
средство, реагирующее на упомянутые датчики, для определения уровней индексов возбуждения в соответствии с критериями приоритета, выбранными из множества групп неврожденных анимаций, содержащих настроение тела робота, соответствующее одному из множества уровней индексов возбуждения от грустного до веселого, физическое состояние робота, соответствующее одному из множества уровней индексов возбуждения от изнуренного или сонного до энергичного, состояние тела робота, определяемое уровнями индексов возбуждения кормом от голодного до перекормленного и пресыщенного, уровнями индексов возбуждения здоровья от болезненного до здорового и уровнями индексов возбуждения эмоций тела робота от испуганного до возбужденного, и
множество сервоприводов, ассоциативно связанных с упомянутым телом робота и реагирующих на преобладающие индексы возбуждения для побуждения робота выполнять анимации, являющиеся их результатом, и совместимые с врожденными атрибутами пола, активности, характера, повиновения, тембра, шумности и смышлености.
2. Роботизированная жизненная форма по п. 1, в которой первый из упомянутых приводов управляет упомянутыми глазами робота, второй из упомянутых приводов управляет открыванием и закрыванием упомянутой пасти, третий из упомянутых приводов управляет движением упомянутой головы, четвертый из упомянутых приводов управляет движением шеи относительно туловища, а пятый из упомянутых приводов управляет относительным движением передней и задней частей туловища, чтобы побуждать туловище поворачиваться и извиваться, тем самым выдавая похожие на живые реакции на воспринятые условия.
3. Роботизированная жизненная форма по п. 1, дополнительно содержащая средство в упомянутом роботе, устанавливающее врожденные атрибуты, в том числе пол, активность, характер, послушность, тембр, шумность и смышленость.
4. Роботизированная жизненная форма по п. 1, в которой упомянутый робот является мужского пола, отличающийся проворством, плохим характером, упрямством, низким тембром, высокой шумностью и низкой смышленостью, или
упомянутый робот является женского пола, отличающийся медлительностью, хорошим характером, послушностью, высоким тембром, низкой шумностью и высокой смышленостью, или
упомянутый робот является бесполым, отличается нормальными активностью, характером, послушностью, тембром, шумностью и смышленостью.
5. Роботизированная жизненная форма по п. 1, в которой упомянутое тело робота снабжено акустическим датчиком, средством, реагирующим на громкие звуки для воспроизведения испуганных анимаций и обновления индексов поведения, воспроизведения обнаруживаемых звуком анимаций в ответ на более низкоуровневые звуки или анимаций, ассоциативно связанных с принятым звуковым кодом.
6. Роботизированная жизненная форма по п. 1, в которой упомянутые датчики ввода включают в себя инфракрасный датчик пасти, инфракрасные датчики ступней и датчик положения в пространстве для инициации воспроизведения анимаций в ответ на датчики пасти и ступней и анимаций, ассоциативно связанных с направленным толчком и перемещением.
7. Роботизированная жизненная форма по п. 1, дополнительно включающая в себя средство для выполнения игровых анимаций в ответ на обнаруженную голосовую команду.
8. Роботизированная жизненная форма по п. 1, в которой упомянутые датчики ввода реагируют на ласку положительно и обновляют индексы возбуждения настроения и индексы эмоционального возбуждения, реагируют на удар отрицательно обновлением индексов возбуждения настроения, эмоционального возбуждения и возбуждения раздражения с отрицательным эффектом и обновлением соответствующих индексов возбуждения и реагируют на касание инициированием анимаций, соответствующих местоположению сигнала касания.
9. Роботизированная жизненная форма по п. 1, в которой упомянутое тело робота имеет хвост, сочлененный для движения относительно упомянутого тела, а также сервопривод движения хвоста вверх-вниз и сервопривод движения хвоста из стороны в сторону, связывающие хвост с задней частью упомянутого туловища в ответ на выходное возбуждение.
10. Роботизированная жизненная форма по п. 1, в которой упомянутое тело робота имеет мужские врожденные атрибуты проворства, плохого характера, упрямства, низкого тембра, высокой шумности и несильной смышлености, или
упомянутое тело робота имеет бесполые врожденные атрибуты нормальных активности, характера, послушности, тембра, шумности и смышлености, или
упомянутое тело робота имеет женские врожденные атрибуты и является тихим, с хорошим характером, послушным, с высоким тембром, низкой шумностью и проницательной смышленостью.
11. Роботизированная жизненная форма по п. 1, в которой упомянутое настроение робота имеет уровни индекса возбуждения от очень грустного до очень веселого, уровни индексов возбуждения физического состояния от очень изнуренного или сонного до очень энергичного, уровни индексов питания от очень голодного до перекормленного и пресыщенного, уровни индекса здоровья от очень больного до очень здорового и уровни эмоциональных индексов от очень робкого до очень возбужденного и включает в себя логику выбора группы анимаций, реагирующую на упомянутые уровни индексов.
12. Роботизированная жизненная форма по п. 1, дополнительно содержащая инициаторы датчиков, реагирующие на звук, ИК-датчик пасти, ИК-датчики ступней и датчик положения в пространстве для инициации соответствующих анимаций.
13. Роботизированная жизненная форма по п. 1, дополнительно включающая в себя средство для распознавания клички роботизированной жизненной формы и инициирования игровых анимаций, ассоциативно связанных с обнаруженной голосовой командой.
14. Роботизированная жизненная форма по п. 1, дополнительно включающая в себя средство, реагирующее на инициирующий сигнал RFID корма для определения типа корма и обновления индексов возбуждения с соответствующими положительными или отрицательными эффектами, и/или
упомянутый робот снабжен средством, чувствительным к инициирующему сигналу RFID корма для определения, является ли корм здоровым, закусочным, растительным или лечебным, и положительного или отрицательного реагирования в зависимости от предопределенных индексов возбуждения питания, и/или
включающая в себя модуль обработки корма, чувствительный к инициирующему сигналу RFID для определения, является ли корм необходимым для здоровья, закусочным, растительным или лечебным, и обновления индексов возбуждения с соответствующим положительным или отрицательным эффектом.
15. Роботизированная жизненная форма по п. 1, в которой упомянутое тело робота имеет врожденные атрибуты, в том числе пол, активность, характер, послушность, тембр, шумность и смышленость.
| Устройство для определения влажности сыпучих материалов | 1984 |
|
SU1195231A1 |
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| ЩИТОВОЙ ДЛЯ ВОДОЕМОВ ЗАТВОР | 1922 |
|
SU2000A1 |
| Топчак-трактор для канатной вспашки | 1923 |
|
SU2002A1 |
| US 3911613 A, 14.10.1975 | |||
| Способ и приспособление для нагревания хлебопекарных камер | 1923 |
|
SU2003A1 |
| Перекатываемый затвор для водоемов | 1922 |
|
SU2001A1 |
| Подшипниковый узел для колесно-моторного блока | 1984 |
|
SU1229471A1 |
| Способ ловли птиц | 1943 |
|
SU65394A1 |

