Область техники
Настоящее изобретение относится к подвижному роботу и, в частности, к устройству и способу для определения положения подвижного робота.
Уровень техники
Подвижный робот, в частности робот-уборщик, как правило, представляет собой устройство для автоматической уборки участка посредством всасывания таких посторонних веществ, как пыль или тому подобное, с пола, при этом автоматически перемещаясь вдоль поверхности стены жилого помещения (например, гостиной, жилой комнаты или т.п.), без участия пользователя.
Робот-уборщик определяет расстояние между собой и препятствием на участке уборки, например мебелью, офисным оборудованием, стеной или т.п., с помощью датчика расстояния, и избирательно приводит в действие электродвигатель для привода своего левого колеса и электродвигатель для привода своего правого колеса в зависимости от идентифицированного расстояния, и при этом робот-уборщик автоматически изменяет свое расстояние для уборки убираемого участка. Причем робот-уборщик выполняет уборку, двигаясь по убираемому участку, используя картографическую информацию, хранящуюся в его собственном запоминающем устройстве.
Ниже приводится описание картографирования для формирования картографической информации.
Во-первых, робот-уборщик перемещается вдоль боковой поверхности рабочего пространства (например, вдоль поверхности стены в жилом помещении), чтобы вычислить расстояние и направление между собой и установленной на стене зарядной станцией, и определяет свое положение на основе значения вычисленного расстояния и значения направления, чтобы сканировать рабочее пространство. При этом робот-уборщик определяет свое текущее положение с помощью декодера, установленного на его колесе.
Робот-уборщик определяет, есть ли препятствие между ним и зарядной станцией. Если препятствия нет, то робот-уборщик передает/принимает сигнал на/от зарядной станции зарядки, чтобы сканировать рабочее пространство. Наоборот, если между роботом-уборщиком и зарядной станций препятствие есть, то робот-уборщик сначала сканирует еще одно рабочее пространство, и затем, когда препятствие будет устранено, передает/принимает сигнал на/от зарядной станции, чтобы сканировать рабочее пространство, в котором устранено препятствие.
Но в способе определения положения робота-уборщика с помощью кодера, поскольку текущее положение робота-уборщика проверяется с помощью установленного на колесе кодера, возникает ошибка из-за пробуксовки колеса или холостого вращения.
Согласно еще одному известному способу обнаружения положения робота-уборщика: в рабочем пространстве (например, на поверхности стены жилой комнаты) прикрепляют наклейки или отражательные пластины одинаковой формы через определенные интервалы, и робот-уборщик распознает наклейку или отражательную пластину с помощью ПЗС-камеры, чтобы тем самым компенсировать ошибку, возникающую из-за пробуксовывания колеса или холостого вращения, и тем самым робот-уборщик определяет расстояние между собой и зарядной станцией. Но в этом способе определение положения робота-уборщика с помощью наклейки или отражательной пластины, когда яркость освещения убираемого участка изменяется или если распознается форма, аналогичная наклейке или отражательной пластине, ошибка расстояния может увеличиваться.
Помимо этого, если яркость освещения выше или ниже порогового значения, то ПЗС-камера (прибор с зарядовой связью) не сможет распознать наклейку или отражательную пластину, и поэтому робот-уборщик не сможет проверить свое положение. При этом, поскольку ПЗС-камера должна устанавливаться на роботе-уборщике, поэтому возрастает себестоимость робота-уборщика.
Технология робота-уборщика согласно известному уровню техники также описывается в патентах США №№5440216 и 5646494.
Сущность изобретения
Поэтому задача данного изобретения заключается в обеспечении устройства и способа для определения положения подвижного робота, с помощью которых будет точно определяться положение робота-уборщика путем вычисления времени, необходимого для приема каждого ультразвукового сигнала подвижным роботом после его генерирования средством генерирования ультразвукового сигнала в зарядной станции, на основе РЧ-(радиочастотного)сигнала, излучаемого через определенные временные интервалы, и значения расстояния между средствами генерирования ультразвукового сигнала, и тем самым определения положения подвижного робота на основе вычисленных значений.
Для обеспечения этих и других преимуществ и согласно назначению настоящего изобретения, осуществляемого согласно приводимому здесь общему описанию, обеспечивают способ определения положения подвижного робота, согласно которому: вычисляют время, необходимое каждому ультразвуковому сигналу, генерированному средством генерирования ультразвукового сигнала в зарядной станции, чтобы достичь подвижного робота, на основе момента времени, в который подвижный робот излучил РЧ; и вычисляют расстояние между зарядной станцией и подвижным роботом на основе указанного вычисленного времени достижения; и вычисляют угол между зарядной станцией и подвижным роботом на основе вычисленного значения расстояния и заданного значения расстояния между средствами генерирования ультразвукового сигнала.
Для обеспечения этих и других преимуществ и согласно назначению настоящего изобретения, осуществляемого согласно приводимому здесь общему описанию, обеспечивают устройство для определения положения подвижного робота, которое генерирует РЧ-сигнал и ультразвуковые сигналы, вычисляет время, необходимое каждому ультразвуковому сигналу, чтобы достичь подвижного робота, на основе момента времени, в который генерирован РЧ-сигнал; и определяют положение подвижного робота на основе указанного времени достижения и заданного значения расстояния между средством генерирования ультразвукового сигнала, который генерирует ультразвуковые сигналы.
Для обеспечения этих и других преимуществ и согласно назначению настоящего изобретения, осуществляемого согласно приводимому здесь общему описанию, обеспечивают устройство для определения положения подвижного робота, содержащее: средство генерирования РЧ, установленное в подвижном роботе и излучающее РЧ-сигнал; средство приема РЧ, установленное в зарядной станции и принимающее РЧ-сигнал, излучаемый средством генерирования РЧ; средства генерирования ультразвукового сигнала, каждое из которых установлено в зарядной станции и генерирует ультразвуковые сигналы; управляющее средство для управления средств генерирования ультразвукового сигнала, при этом ультразвуковые сигналы генерируются всякий раз, когда РЧ-сигнал принимается средством приема РЧ; средство приема ультразвукового сигнала, установленное на внешней поверхности периметра подвижного робота и принимающее ультразвуковые сигналы, генерируемые средствами генерирования ультразвукового сигнала; и микрокомпьютер, установленный в подвижном роботе и вычисляющий расстояние и угол между подвижным роботом и зарядной станцией на основе времени, необходимого каждому ультразвуковому сигналу, чтобы дойти до подвижного робота, и заданного значения расстояния между средствами генерирования ультразвуковых сигналов.
Упомянутые выше и прочие объекты, признаки, особенности и преимущества настоящего изобретения поясняются в приводимом ниже подробном описании настоящего изобретения совместно с прилагаемыми чертежами.
Перечень чертежей
Прилагаемые чертежи, поясняющие изобретение и являющиеся неотъемлемой частью данного описания, иллюстрируют осуществления изобретения и вместе с описанием поясняют его принципы.
На чертежах:
фиг.1 - блок-схема конструкции устройства определения положения подвижного робота в соответствии с осуществлением настоящего изобретения;
фиг.2 - блок-схема способа определения положения подвижного робота в соответствии с осуществлением настоящего изобретения;
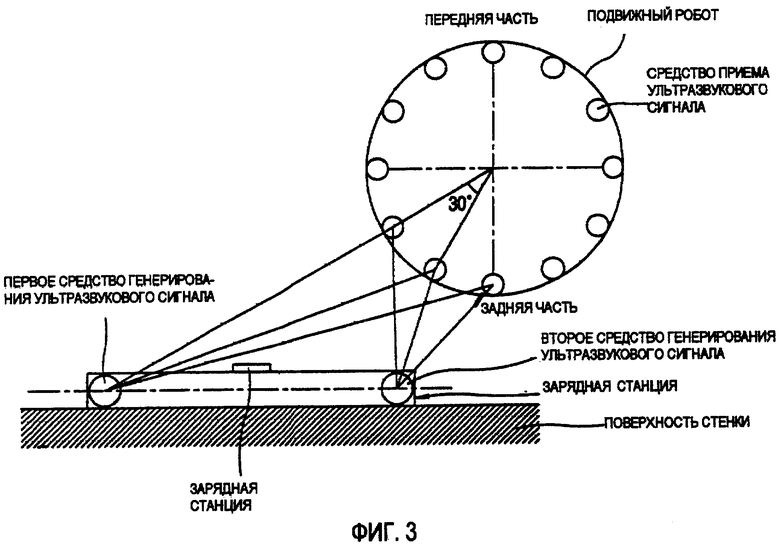
фиг.3 - схематическое изображение способа вычисления расстояния и угла между подвижным роботом и зарядной станцией в соответствии с осуществлением настоящего изобретения;
Сведения, подтверждающие возможность осуществления изобретения
Ниже приводится, со ссылкой на фиг.1-3, подробное описание предпочтительного варианта осуществления устройства и способа определения положения подвижного робота, которые обеспечивают возможность точного определения положения подвижного робота путем вычисления времени, необходимого каждому ультразвуковому сигналу, генерированному средством генерирования ультразвукового сигнала в зарядной станции, чтобы достичь подвижного робота, на основе момента времени, в который генерирован РЧ-сигнал; вычисления расстояния между зарядной станцией и подвижным роботом на основе указанного вычисленного времени достижения; и вычисления угла между зарядной станцией и подвижным роботом на основе вычисленного значения расстояния и заданных значений расстояния между средствами генерирования ультразвукового сигнала.
Фиг.1 показывает блок-схему конструкции устройства определения положения подвижного робота в соответствии с осуществлением настоящего изобретения.
В соответствии с упомянутой схемой: устройство определения положения подвижного робота согласно осуществлению настоящего изобретения содержит: средство 1 генерирования РЧ, установленное в определенном в подвижном роботе и излучающее РЧ-сигнал через определенные интервалы времени для определения положения подвижного робота; средство 2 приема РЧ, установленное в заданном положении в зарядной станции, находящейся, например, на поверхности стены жилого помещения, и принимающее РЧ-сигнал, излучаемый средством 1 генерирования РЧ; первое и второе средства 3, 4 генерирования ультразвукового сигнала, каждое из которых установлено в заданном положении в зарядной станции и соответственно генерирующее первый и второй ультразвуковые сигналы в целях вычисления расстояния и угла между подвижным роботом и зарядной станцией; управляющее средство 5, установленное в заданном положении в зарядной станции и управляющее первым и вторым средствами 3, 4 генерирования ультразвукового сигнала, в результате чего первый и второй ультразвуковые сигналы соответственно генерируются всякий раз при приеме РЧ-сигнала средством 2 приема РЧ; множество средств (Rx1˜Rxn) приема ультразвукового сигнала, установленных на внешней поверхности периметра подвижного робота с определенным интервалом между ними и соответственно принимающих первый и второй ультразвуковые сигналы, генерируемые первым и вторым средствами 3, 4 генерирования; микрокомпьютер 6, установленный в подвижном роботе и вычисляющий расстояние и угол между подвижным роботом и зарядной станцией на основе времени прохождения каждого сигнала из числа первого и второго ультразвуковых сигналов и заданного значения расстояния между первым и вторым средствами 3, 4 генерирования ультразвукового сигнала; и запоминающее устройство 7 для запоминания чисел для идентифицирования положений множества средств (Rx1˜Rxn) приема ультразвукового сигнала и заданного значения расстояния между первым и вторым средствами 3, 4 генерирования ультразвукового сигнала.
Далее приводится описание действия устройства для определения положения подвижного робота в соответствии с осуществлением настоящего изобретения.
Во-первых, при перемещении подвижного робота по убираемому участку по заданной схеме движения микрокомпьютер 6 управляет средством 1 генерирования РЧ, чтобы определять положения подвижного робота через заданные интервалы времени.
Средство 1 генерирования РЧ генерирует РЧ-сигнал для определения положений подвижного робота через заданные интервалы времени (например, каждые 3 секунды) под управлением микрокомпьютера 6, и излучает генерируемый РЧ-сигнал.
Средство 2 приема РЧ, установленное в зарядной станции, принимает РЧ-сигнал и выводит первый уведомляющий сигнал, сообщающий, что РЧ-сигнал принят, в управляющее средство 5, находящееся в зарядной станции. При этом управляющее средство 5 управляет первым и вторым средствами 3, 4 генерирования ультразвукового сигнала в заданные интервалы времени на основе первого уведомляющего сигнала.
Первое и второе средства 3, 4 генерирования ультразвукового сигнала соответственно генерируют первый и второй ультразвуковые сигналы под управлением управляющего средства 5. Причем может быть установлено множество первого и второго устройств генерирования ультразвукового сигнала, и также множество первого и второго устройств генерирования ультразвукового сигнала может быть установлено в заданных положениях зарядной станции симметрично друг другу в горизонтальном направлении, либо оно может быть установлено в заданных положениях зарядной станции симметрично друг другу в вертикальном и горизонтальном направлениях. Зарядная станция стационарно установлена на поверхности стены жилого помещения или тому подобного помещения для зарядки батареи (не показана) подвижного робота.
Затем множество средств (Rx1˜Rxn) приема ультразвукового сигнала, установленных в подвижном роботе, принимает соответственно генерированные первый и второй ультразвуковые сигналы и выводит второй уведомляющий сигнал, сообщающий микрокомпьютеру 6 о том, что первый и второй ультразвуковые сигналы приняты.
На основе второго уведомляющего сигнала микрокомпьютер 6 вычисляет время, необходимое каждому сигналу из числа первого и второго ультразвуковых сигналов, чтобы достичь одно или более средств приема (Rx1˜Rxn) ультразвуковых сигналов после их генерирования средствами 3, 4 генерирования ультразвукового сигнала. Затем микрокомпьютер 6 вычисляет расстояние и угол между подвижным роботом и зарядной станцией на основе указанного вычисленного времени достижения и заданного значения расстояния между первым и вторым средствами 3, 4 генерирования ультразвукового сигнала, тем самым определяя текущее положение подвижного робота. Затем микрокомпьютер 6 компенсирует текущую ошибку положения подвижного робота на основе значения определенного положения.
Микрокомпьютер 6 также проверяет положения средств (например, Rx1, Rx2) приема ультразвукового сигнала, которые приняли первый и второй ультразвуковые сигналы, из числа множества средств (Rx1˜Rxn) приема ультразвукового сигнала путем идентифицирования соответствующего средства приема ультразвукового сигнала по номерам положения, заранее запомненным в запоминающем устройстве 7. То есть, микрокомпьютер 6 определяет направление, в котором следует подвижный робот, по заданному номеру положения средства приема ультразвукового сигнала, которое приняло ультразвуковой сигнал.
Например, внешняя форма подвижного робота круглая, и задняя часть подвижного робота (противоположная направлению, в котором следует робот) составляет ноль градусов; первое средство (Rx1) приема ультразвукового сигнала установлено в положении ноля градусов, и второе средство (Rx2) приема ультразвукового сигнала установлено в положении, отстоящем от первого средства приема ультразвукового сигнала с интервалом в 30 градусов между ними. То есть, первое и второе средства (Rx1, Rx2) приема ультразвукового сигнала установлены рядом друг с другом. При этом, если положение номера первого средства (Rx1) приема ультразвукового сигнала есть «1», и номер положения второго средства (Rx2) приема ультразвукового сигнала есть «2», когда первый и второй ультразвуковые сигналы принимаются первым и вторым средствами (Rx1, Rx2) приема сигнала, то микрокомпьютер 5 может точно распознать, что подвижный робот перемещается в направлении, противоположном зарядной станции, по этим номерам положения, поскольку первое и второе средства (Rx1, Rx2) приема ультразвукового сигнала установлены на задней части внешней поверхности периметра подвижного робота.
Ниже приводится описание способов вычисления расстояния и угла между подвижным роботом и зарядной станцией.
Во-первых, микрокомпьютер 6 определяет время, требуемое для приема каждого сигнала из числа первого и второго ультразвуковых сигналов одним или несколькими средствами (Rx1-Rxn) приема ультразвукового сигнала после соответствующего их генерирования первым и вторым средствами 3, 4 генерирования ультразвукового сигнала, на основе момента времени, когда генерирован РЧ-сигнал, который генерируется через заданные интервалы. Затем микрокомпьютер 6 вычисляет расстояние между подвижным роботом и зарядной станцией на основе указанным образом определенного времени достижения. Первый и второй ультразвуковые сигналы могут быть приняты одним средством (например, Rx1) приема ультразвукового сигнала, или двумя, или более средствами (например, Rx1˜Rx3) приема ультразвукового сигнала.
Например, микрокомпьютер 6 определяет время, необходимое каждому сигналу из числа первого и второго ультразвуковых сигналов, чтобы быть принятым одним или более средствами (Rx1˜Rxn) приема ультразвукового сигнала после его генерирования первым и вторым средствами 3, 4 генерирования ультразвукового сигнала, на основе момента времени, в который генерирован РЧ-сигнал, генерируемый с заданными временными интервалами. Затем микрокомпьютер 6 на основе определенного указанным образом времени достижения вычисляет расстояние между подвижным роботом и зарядной станцией. То есть, если первый и второй ультразвуковые сигналы обнаружены только в одном средстве (Rx1) приема ультразвукового сигнала, то микрокомпьютер 6 вычисляет значение расстояния между одним средством (Rx1) приема ультразвукового сигнала и зарядной станцией на основе времени, необходимого для достижения каждым сигналом из числа первого и второго ультразвуковых сигналов, принимаемых одним средством (Rx1) приема ультразвукового сигнала, и вычисляет фактическое расстояние между подвижным роботом и зарядной станцией путем суммирования полудиаметра подвижного робота с вычисленным значением расстояния. При этом угол между подвижным роботом и зарядной станцией вычисляется триангуляцией на основе времени достижения каждого сигнала из числа первого и второго ультразвуковых сигналов и заданного значения расстояния между первым и вторым средствами 3, 4 генерирования ультразвукового сигнала.
При обнаружении первого и второго ультразвуковых сигналов двумя средствами (например, Rx1, Rx2) микрокомпьютер 6 вычисляет расстояния между подвижным роботом и зарядной станцией на основе времени достижения каждого сигнала из числа первого и второго ультразвуковых сигналов. Затем микрокомпьютер 6 вычисляет угол между подвижным роботом и зарядной станцией триангуляцией на основе каждого полученного значения расстояния и заданного значения расстояния между первым и вторым средствами 3, 4 генерирования ультразвукового сигнала.
При этом микрокомпьютер 6 определяет расстояние (s) между средствами приема ультразвукового сигнала и средствами генерирования ультразвукового сигнала согласно следующей формуле:
S=340 [m/sec]×(Т1-Т2) формула 1
где 340 [m/s] - скорость звука; Т1 - время, требуемое для приема ультразвукового сигнала, Т2 - время, требуемое для генерирования ультразвукового сигнала ультразвукового сигнала после приема РЧ-сигнала.
Далее следует подробное описание работы устройства определения положения подвижного робота в соответствии с настоящим изобретением со ссылкой на фиг.2, 3.
Фиг.2 показывает блок-схему способа определения положения подвижного робота согласно осуществлению настоящего изобретения.
Фиг.3 схематически показывает этапы вычисления расстояния и угла между подвижным роботом и зарядной станцией согласно настоящему изобретению.
Во-первых, по истечении заданного времени (S1) средство 1 генерирования РЧ генерирует РЧ-сигнал (S2). РЧ-сигнал генерируется по истечении заданного времени.
Первое и второе средства 3, 4 генерирования ультразвукового сигнала, установленные в зарядной станции, затем формируют первый и второй ультразвуковые сигналы на основе момента времени, в который сформирован РЧ-сигнал (S3). При этом первый ультразвуковой сигнал генерируется раньше второго ультразвукового сигнала. Соответственно, при определении фактического времени достижения второго ультразвукового сигнала, генерированного по истечении заданного времени после генерирования первого ультразвукового сигнала, микрокомпьютер 6 определяет фактическое время достижения второго ультразвукового сигнала путем вычитания заданного времени из времени достижения второго ультразвукового сигнала, включающего в себя заданное время.
Затем микрокомпьютер 6 определяет время (время достижения), необходимое для приема каждого сигнала из числа первого и второго ультразвуковых сигналов одним или более средствами приема ультразвукового сигнала, и затем вычисляет расстояние и угол между подвижным роботом и зарядной станцией на основе указанным образом определенного времени достижения и заданного значения расстояния между первым и вторым средствами 3, 4 генерирования ультразвуковых сигналов. При этом первый и второй ультразвуковые сигналы могут приниматься одним, или двумя, и более средствами приема ультразвукового сигнала в соответствии с положением подвижного робота.
Далее приводится описание способов определения положения подвижного робота, когда первый и второй ультразвуковые сигналы принимаются одним средством (например, Rx1) приема ультразвукового сигнала и принимаются двумя или более средствами (например, Rx1˜Rx3) приема ультразвукового сигнала.
Сначала микрокомпьютер 6 определяет, принимаются ли первый и второй ультразвуковые сигналы (S4) двумя или более средствами приема ультразвукового сигнала. Например, когда первый и второй ультразвуковые сигналы обнаружены только в одном средстве (Rx1) приема ультразвукового сигнала, микрокомпьютер 6 вычисляет значение расстояния между одним средством (Rx1) приема ультразвукового сигнала и зарядной станцией на основе времени достижения обнаруженных первого и второго сигналов. Например, микрокомпьютер 6 вычисляет время достижения первого ультразвукового сигнала (S5) и вычисляет расстояния между средством (Rx1) приема ультразвукового сигнала и каждым средством из числа первого и второго средств 3, 4 (S6) генерирования ультразвукового сигнала.
Помимо этого, путем суммирования полудиаметра подвижного робота со значением расстояния между средством (Rx1) приема ультразвукового сигнала и зарядной станцией микрокомпьютер 6 вычисляет фактическое расстояние между подвижным роботом и зарядной станцией (S7). При этом угол между подвижным роботом и зарядной станцией вычисляется триангуляцией на основе значения расстояния между средством (Rx1) приема ультразвукового сигнала и первым средством 3 генерирования ультразвукового сигнала в зарядной станции, значения расстояния между средством (Rx1) приема ультразвукового сигнала и вторым средством 4 генерирования ультразвукового сигнала и заданного значения расстояния между первым и вторым средствами (S8) генерирования ультразвукового сигнала.
При приеме первого и второго ультразвуковых сигналов двумя или более средствами (например, Rx1˜x3) приема ультразвуковых сигналов микрокомпьютер 6 вычисляет время достижения первого и второго ультразвуковых сигналов, принимаемых двумя или более средствами (Rx1˜Rx3) приема ультразвукового сигнала (S9). Для уменьшения объема вычислений в микрокомпьютере 6: микрокомпьютер 6 выбирает два средства (например, Rx1 и Rx2) приема ультразвукового сигнала, которые приняли самые быстрые ультразвуковые сигналы среди вычисленных значений (S10) времени достижения, и вычисляет значения расстояния между зарядной станцией и каждым из двух выбранных средств приема ультразвукового сигнала на основе времени достижения первого и второго ультразвуковых сигналов, принятых двумя выбранными средствами (S11) приема ультразвукового сигнала.
Помимо этого, путем суммирования полудиаметра подвижного робота со значением расстояния между зарядной станцией и каждым из двух выбранных средств (например, Rx1 и Rx2) приема ультразвукового сигнала микрокомпьютер 6 вычисляет фактическое расстояние между подвижным роботом и зарядной станцией (S12).
Затем микрокомпьютер 6 вычисляет угол между подвижным роботом (например, Rx1 и Rx2) и зарядной станцией триангуляцией на основе фактических значений расстояния между зарядной станцией и двумя выбранными средствами (например, Rx1 и Rx2) приема ультразвуковых сигналов и заданного значения расстояния между первым и вторым средствами 3, 4 (S13).
При этом микрокомпьютер 6 определяет направление, по которому следует подвижный робот, по номеру положений двух средств приема ультразвукового сигнала, принявших первый и второй ультразвуковые сигналы, чтобы проверить текущее положение подвижного робота, и компенсирует ошибку положения подвижного робота в зависимости от проверяемого положения.
По истечении заданного времени (S1) этапы (S2-S13) для определения положения подвижного робота выполняются повторно.
В соответствии с излагаемым выше описанием устройство и способ определения положения подвижного робота согласно настоящему изобретению могут точно определять положение подвижного робота путем вычисления времени, требуемого каждому ультразвуковому сигналу, генерируемому средством генерирования ультразвукового сигнала в зарядной станции, чтобы достичь подвижного робота, на основе момента времени, в который генерирован РЧ-сигнал, излучаемый подвижным роботом; вычисления расстояния между зарядной станцией и подвижным роботом на основе вычисленного времени достижения; и вычисления угла между зарядной станцией и подвижным роботом на основе вычисленного значения расстояния и заданного значения расстояния между средством генерирования ультразвукового сигнала.
Помимо этого, устройство и способ для определения положения подвижного робота согласно настоящему изобретению точно определяют текущее положение подвижного робота, не используя для этого дорогостоящую ПЗС-камеру, в результате чего снижается себестоимость подвижного робота.
Несмотря на то что настоящее изобретение можно осуществить в нескольких вариантах в рамках его изобретательской идеи и существенных признаков, подразумевается, что излагаемые выше варианты осуществления не ограничиваются какими-либо частностями данного описания, если это специально не оговаривается; и данное изобретение следует истолковывать в широком смысле в рамках его концепции и объема, определяемых в прилагаемой формуле изобретения, и поэтому все изменения и варианты в рамках притязаний или их эквивалентов считаются включенными в прилагаемую формулу изобретения.

Изобретение относится к подвижному роботу (уборщику) и, в частности, к определению его положения в рабочем пространстве. Устройство определения положения подвижного робота согласно настоящему изобретению выполнено с возможностью точного определения положения подвижного робота путем вычисления времени, необходимого каждому ультразвуковому сигналу, генерируемому средствами генерирования ультразвукового сигнала, чтобы достичь подвижного робота, на основе момента времени, в который генерирован РЧ-(радиочастотный) сигнал, излучаемый подвижным роботом; вычисления расстояния между зарядной станцией и подвижным роботом на основе указанного вычисленного времени достижения; и вычисления угла между зарядной станцией и подвижным роботом на основе вычисленного значения расстояния и заданного значения расстояния между средствами генерирования ультразвукового сигнала. 7 з.п. ф-лы, 3 ил.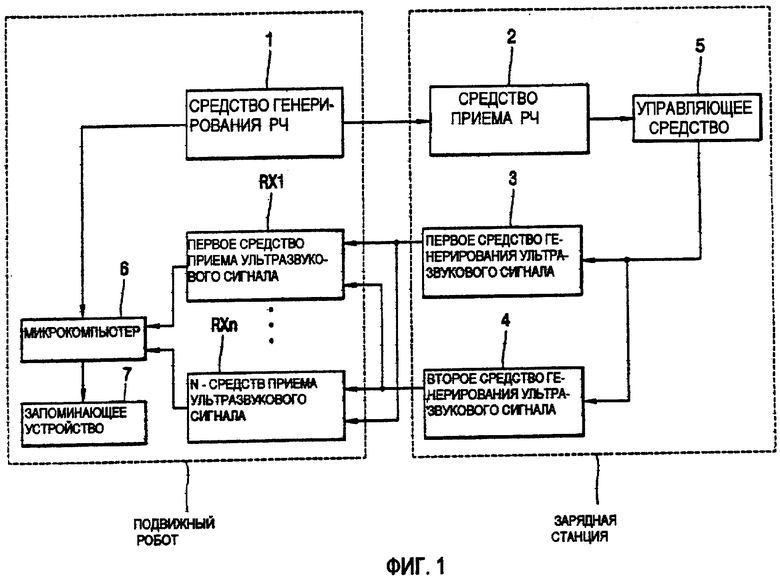
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| US 5646494 A1, 08.07.1997 | |||
| US 5440216 A1, 08.08.1995 | |||
| ПОДВИЖНОЕ КОНТРОЛЬНОЕ УСТРОЙСТВО (ВАРИАНТЫ) | 1991 |
|
RU2134908C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ ПОДВИЖНОГО ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2092788C1 |

