Изобретение относится к устройству для динамической калибровки датчиков давления, содержащему корпус, соединенный с корпусом цилиндр для размещения текучей среды, выполненный с возможностью соединения с первым датчиком давления, актор и взаимодействующий с цилиндром поршень. При этом актор расположен между корпусом и обращенной от цилиндра стороной поршня.
Используемый актор преобразует при этом входной сигнал в механическое движение. Например, речь может идти при этом о пьезоэлектрическом акторе, который механически деформируется при приложении напряжения. Эта механическая деформация может передаваться затем в виде механического движения на поршень.
Изобретение относится также к способу динамической калибровки датчиков давления, при котором измеряется представляющий воздействующее на датчик давления давление фактический параметр и сравнивается с соответствующим заданным параметром. На основе сравнения определяется калибровочное значение с для фактического параметра, причем давление создается посредством поршня, взаимодействующего с цилиндром, заполненным текучей средой.
Датчик давления рассматриваемого здесь рода служит для определения давления текучей среды. Он может использоваться, например, для того чтобы определить давление масла или давление тормозной жидкости в автомобилях. При этом на выходе датчика давления создается соответствующая физическая выходная величина, например соответствующее давлению значение электрического напряжения.
В зависимости от изготовления отношение давления к выходной величине может быть различным от одного датчика давления к другому. Это касается как статических колебаний отношения, разного поведения при различных статических давлениях, так и отличий в динамическом поведении, т.е. отличий между различными датчиками давления в отношении их частотной характеристики при динамически изменяющихся давлениях.
Чтобы прийти к правильной оценке выходной величины, требуется поэтому калибровка датчика давления как в отношении его статического, так и динамического поведения. Описанное ниже изобретение касается калибровки динамического поведения датчиков давления.
Под калибровкой следует понимать способ, при котором на первом этапе определяется отклонение датчика от нормали, чтобы на втором этапе выявленное отклонение при последующем использовании датчика использовать для корректировки выявленных им значений.
Известна динамическая калибровка датчиков колебаний, в том числе также за счет предложения услуги заявителя. При этом калибруемый датчик колебаний возбуждается узко- или широкополосными сигналами. При узкополосном возбуждении датчики колебаний возбуждаются максимально ненарушенным синусообразным сигналом. При широкополосном возбуждении датчики колебаний возбуждаются, как правило, импульсами.
При возбуждении синусообразными сигналами можно измерить ответ, например выход U по напряжению датчика колебаний. Он ставится в соотношение с известным возбуждением, т.е. ускорением а, и получают чувствительность датчика:
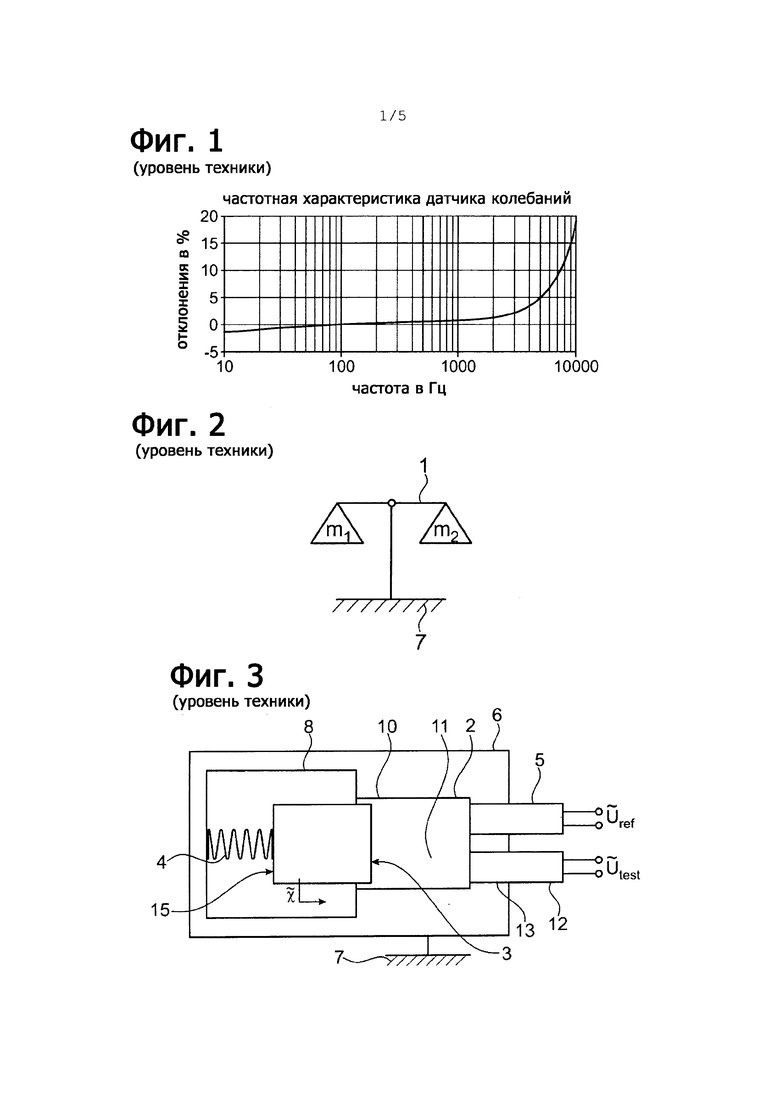
На основе конструктивного принципа датчика колебаний она, однако, зависит от частоты. При изменении частоты возбуждения частотная характеристика датчика колебаний может быть записана, как это показано на фиг. 1. Частотная характеристика помогает оценить, до какой частоты датчик колебаний может использоваться при реальном измерении и с какой частоты следует считаться с колебаниями измеренных значений.
В метрологии различают два вида калибровки – вторичную и первичную.
Известное определение частотной характеристики датчика колебаний осуществляется посредством первичной калибровки.
При первичной калибровке искомая физическая величина вычисляется по другим величинам. Если следует первично определить, например, массу жидкости, то можно измерить ее плотность ρ или определить по таблицам в качестве постоянной материала и измерить объем V жидкости. С помощью уравнения
m = V•ρ
можно вычислить массу m. При этом входящие в уравнение величины определяются, как правило, очень точно и позволяют очень точно вычислить определяемую величину. При вторичной калибровке между собой сравниваются только две величины. Следовательно, речь идет о сравнительной калибровке. Для изображенного на фиг. 2 примера это означает, что использование коромысловых весов для определения искомой массы m2 является сравнительным измерением. Если коромысло 1 горизонтально, то у плеч рычага одинаковой длины это означает, что масса m2 является такой же большой, что и известная масса m1. Масса m2 тогда определена и может быть указана с допусками измерительной системы как
m2 = m1
Для определения частотной характеристики датчиков давления такая вторичная калибровка известна.
Для этого известны динамические генераторы давления, которые всегда оборудованы сравнительным датчиком и служат, тем самым, для вторичной калибровки, как описано выше. Такой динамический генератор давления известен из нескольких публикаций:
- Kuhn; Werthschützky: Analysis of Dynamic Charakteristics of Pressure Sensors, EMK TU Darmstadt;
- Stefan Sindlinger: Einfluss der Gehäusung auf die Messunsicherheit von mikrogehäusten Drucksensoren mit piezoresistivem Messelement, Dissertation, EMK TU Darmstadt, 2007;
- Sven Kuhn: Messunsicherheit elektromechanischer Wirkprinzipien zur Druckmessung und Optimierung von Verfahren zur Fehlerkorrektur, Dissertation, EMK TU Darmstadt, 2001;
- Timo Kober: Analyse des Übertragungsverhaltens von Differenzdrucksensoren durch dynamische Druckkalibrierung, Artikel Technisches Messen 2/2010;
- Luca Tomasi: A new micromachined piezoresistive pressure sensor with dual range and self-test functionalities, Dissertation, 2007 или
- Adam Hurst: An Experimental Frequency Response Characterization of MEMS Piezoresistive Pressure Transducers, Proceedings of ASME Turbo Expo 2014: Turbine Technical Conference and Exposition, 2014-
Эти решения можно схематично объединить на фиг. 3.
В них в контрольном объеме 2 с помощью мембраны 3 создается давление р. К этой мембране 3 через поршень 8 присоединен пьезоэлектрический актор 4. Когда к пьезоэлектрическому актору 4 прикладывается напряжение, он расширяется. Расширение вызывает смещение мембраны 3. Она сжимает масло, которым заполнен контрольный объем 2, и вызывает возрастание давления.
Благодаря свойствам пьезоэлектрического актора 4 этим способом можно достичь описанных выше целей разработки. Частоту созданного давления р можно варьировать через частоту приложенного к актору напряжения. Амплитудой давления р можно управлять через амплитуду напряжения.
Как уже сказано, также в этом устройстве предусмотрен сравнительный датчик 5. Он имеет неизвестную динамику. Однако благодаря своей конструкции у него предполагается очень хорошая динамика. По отношению к фиг. 1 это означает, что
отклонение чувствительности по всем частотам равно 0%. Опорным значением является статически выявленная чувствительность сравнительного датчика 5.
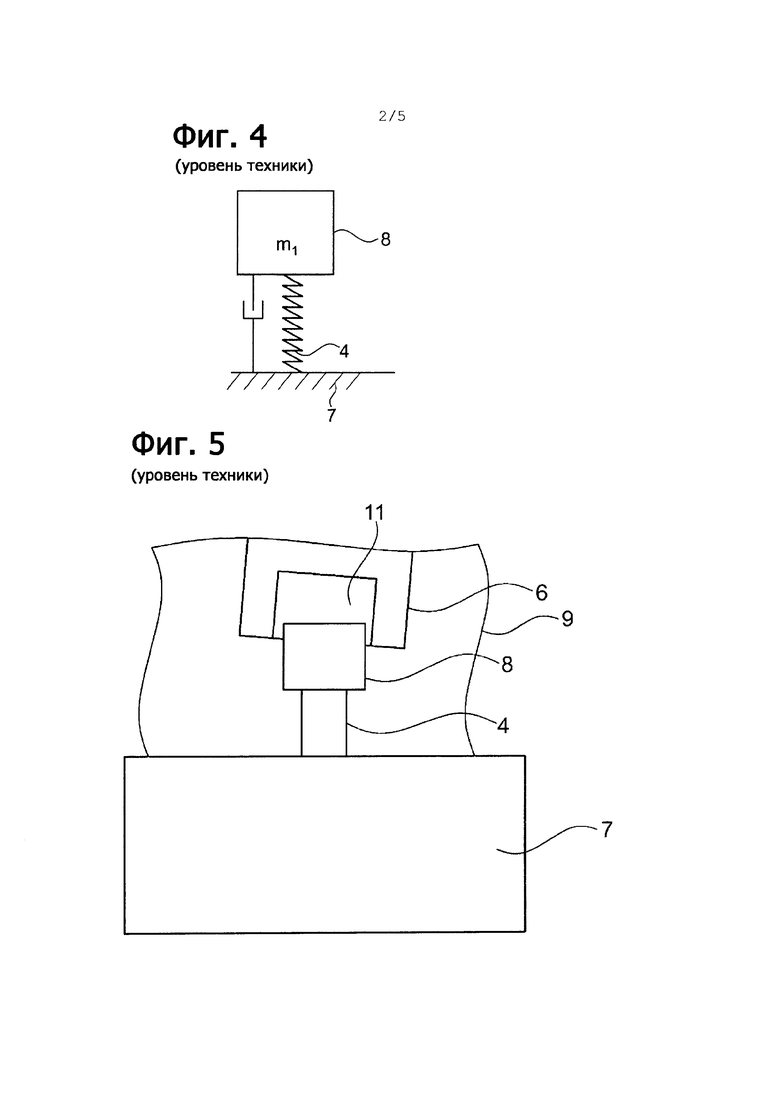
Помимо того факта, что известный генератор давления предусмотрен для вторичной калибровки, оказалось, что конструкция, которая предусматривает, что корпус находится в покое, т.е. прочно соединен с фундаментом, приводит к тому, что корпус совершает бесконтрольные и сильные колебания, вследствие чего использование для первичной калибровки, при которой должно быть вычислено давление р, исключается из-за сильного мешающего влияния на расчет давления. Как показано на механической эквивалентной схеме на фиг. 4, корпус 6 прочно соединен с фундаментом 7. Этим должна быть достигнута возможность лишь одного движения поршня 8. Движение поршня 8 и корпуса 6 в противоположную сторону должно быть предотвращено за счет фундамента 7 и соединения корпуса 6 с ним, например через траверсу 9. При этом масса фундамента 7, по меньшей мере, на порядок больше массы корпуса 6.
Как схематично показано на фиг. 5, заодно колеблются также массы корпуса 6 и траверсы 9. Это происходит весьма бесконтрольно и поэтому не подходит для первичной калибровки.
Для динамического поведения датчиков давления не известен никакой стандартный способ первичной калибровки. Вследствие этого не существует также никакой динамически калиброванной нормали давления, которую можно было бы использовать для вторичной калибровки.
Задачей изобретения является создание способа и устройства, которые обеспечивали бы первичную калибровку динамического поведения датчика давления.
Эта задача решается посредством устройства описанного выше рода, которое статически определено только за счет соответствующего соединения корпус-актор и актор-поршень, а поршень герметизирован в цилиндре от окружающей атмосферы посредством уплотнения и подвижно расположен в уплотнении. В противоположность уровню техники, изображенному, в частности, на фиг. 4, отпадает соединение с фундаментом, и возникает свободный двухмассовый осциллятор. Массы свободного двухмассового осциллятора соединены между собой обоими элементами – текучей средой и актором. Жесткость и демпфирование элементов – текучая среда и актор – суммируются. У обеих масс допускается желаемое движение. Из-за отсутствующего фундамента это движение является определенным и легко измеряемым. Положение поршня и корпуса статически определяется исключительно с помощью актора или его корпуса в противоположность уровню техники, в котором для герметизации используется металлическая мембрана. За счет нее система статически переопределена, т.е. положение масс корпуса и поршня по отношению друг к другу определяется не одним соединением (корпус актора), а двумя соединениями (корпус пьезоактора + металлическая мембрана).
Преимущественно использования уплотнения, в частности эластомерного уплотнения, заключается в том, что необходимы меньшие исполнительные усилия для сжатия масла. Поэтому пьезоактор может иметь меньшие размеры, система, вообще, более компактная, а колебания, тем самым, в свою очередь, более определенные.
Для размещения первого датчика давления корпус может быть снабжен отверстием между своей внешней стороной и цилиндром. При этом отверстие может быть выполнено в виде отверстия для ввинчивания.
В другом варианте осуществления изобретения предусмотрено, что при использовании для первичной калибровки имеется измерительная система, регистрирующая движение поршня относительно корпуса. Поскольку речь идет о свободном двухмассовом осцилляторе, это относительное движение должно регистрироваться предпочтительным образом за счет определения движения поршня и корпуса. Движения измеряются целесообразно непосредственно в том месте поршня и корпуса, которое граничит непосредственно с текучей средой.
При этом предпочтительно, если измерительная система выполнена с возможностью регистрации как динамических, так и статических движений. Поскольку для расчета как давления, так и объема следует измерять статические и динамические движения поршня, за счет такого выполнения могут отпасть несколько измерительных систем.
Согласно другому варианту, измерительная система может быть выполнена в виде калиброванного датчика колебаний или в виде лазерного виброметра с декодером скорости и пути.
При этом актор может быть выполнен в виде полого актора с лучевой проводкой, через которую лазерный виброметр направлен на поршень.
Поскольку, согласно изобретению, в распоряжение может быть предоставлен динамически первично-калиброванный датчик давления, он может осуществлять тогда также точную вторичную калибровку. Для этого предусмотрено, что при использовании для вторичной калибровки цилиндр для размещения текучей среды соединяется с вторично калибруемым вторым датчиком давления. При вторичной калибровке с помощью первично-калиброванного датчика давления в качестве эталонного датчика можно значительно снизить затраты.
При этом корпус может быть снабжен вторым отверстием между своей внешней стороной и цилиндром для размещения второго датчика давления. Это второе отверстие также может быть выполнено в виде отверстия для ввинчивания.
Для осуществления предложенного способа может быть предусмотрен линейный шпиндель, создающий статическое начальное давление в цилиндре.
В качестве альтернативы линейному шпинделю может быть предусмотрен второй цилиндр, в котором подвижно расположен герметизированный от окружающей атмосферы регулировочный поршень.
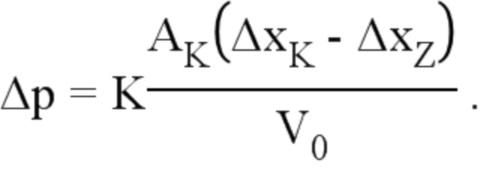
Задача изобретения решается также посредством способа динамической калибровки датчиков давления, при котором соответствующее фактическому значению изменение Δр давления вычисляется посредством значения К сжатия текучей среды, активной площади АК давления, заполненного текучей средой объема V0 цилиндра, перемещения ΔхК поршня и перемещения ΔхZ цилиндра по формуле:
Изменение давления можно затем сравнить с представляющим давление значением калибруемого датчика давления, нагружаемого давлением и, тем самым, изменением давления. Из этого сравнения определяется затем калибровочное значение. Датчик давления калибруется, тем самым, непосредственно детектируемым значением, т.е. первично, а не через сравнение.
Давление рn можно вычислить для различных перемещений хК(1) … хК(n) поршня и перемещений хZ(1) … xZ(n) цилиндра по формуле:
 ,
, .
.
Таким образом, предложенным способом можно выполнять калибровку с разными статическими давлениями.
Перемещение ΔхК … хК поршня и перемещение ΔхZ … xZ цилиндра могут создаваться также динамически, т.е. в виде функции времени  К = dхК/dt и Z = dxZ/dt. Динамическая функция давления
К = dхК/dt и Z = dxZ/dt. Динамическая функция давления  = dp/dt вычисляется тогда по формуле:
= dp/dt вычисляется тогда по формуле:
В этом варианте создания динамической функции давления К и Z могут быть созданы в виде синусоидальной функции с частотой f.
При этом возможно также создание К и Z с переменной частотой, т.е. К(f) и Z(f), а калибровочного значения с – путем расчета зависимого от частоты давления (f) в виде
функции с(f). Таким образом, можно определить полную частотную характеристику датчика.
В первом варианте способа предусмотрено, что на давление в цилиндре накладывается динамическое давление, создаваемое в акторе. Если К и Z создаются в виде синусоидальной функции с частотой f, то в цилиндре создается статическое начальное давление, лежащее выше окружающего давления, на которое затем накладывается динамическое давление.
Требуемые для расчета давления по формуле
значения площади АК поршня, объема V0, модуля К сжатия, а также зависимых от времени движения К поршня и движения Z цилиндра определяются следующим образом:
а) расчет площади АК осуществляется путем измерения диаметра поршня;
б) модуль К сжатия устанавливается с помощью используемой текучей среды и с помощью документированных табличных значений.
Определяются зависимые от времени движение К поршня и движение Z цилиндра. Это может осуществляться за счет отдельного измерения их ускорений  К и Z, а затем с помощью уравнений:
К и Z, а затем с помощью уравнений:
 и
и 
Определение объема V0 осуществляется с использованием необязательно динамически калиброванного датчика давления. Объем V0 заполнен жидкой средой, преимущественно маслом. Следовательно, проводятся два измерения динамического выходного сигнала  датчика давления в цилиндре. Между этими измерениями исходный объем изменяется, однако статическое начальное давление, представленное статическим выходным сигналом U на датчике давления, устанавливается таким же, т.е. на то же значение, что и до изменения исходного объема. Эти этапы можно пояснить подробнее. Сначала проводится первое измерение, причем измеряются движение К1 поршня и движение Z1 цилиндра, и на датчике давления определяется динамический исходный параметр 1 при частоте f1. Затем объем цилиндра изменяется на величину ΔV. После этого проводится второе измерение динамического исходного параметра 2 при той же частоте f2 = f1, причем измеряются движение К2 поршня и движение Z2 цилиндра, которые необходимы, чтобы получить на датчике давления тот же динамический исходный параметр, т.е. 1 = 2. Затем объем V0 может быть вычислен по формуле:
датчика давления в цилиндре. Между этими измерениями исходный объем изменяется, однако статическое начальное давление, представленное статическим выходным сигналом U на датчике давления, устанавливается таким же, т.е. на то же значение, что и до изменения исходного объема. Эти этапы можно пояснить подробнее. Сначала проводится первое измерение, причем измеряются движение К1 поршня и движение Z1 цилиндра, и на датчике давления определяется динамический исходный параметр 1 при частоте f1. Затем объем цилиндра изменяется на величину ΔV. После этого проводится второе измерение динамического исходного параметра 2 при той же частоте f2 = f1, причем измеряются движение К2 поршня и движение Z2 цилиндра, которые необходимы, чтобы получить на датчике давления тот же динамический исходный параметр, т.е. 1 = 2. Затем объем V0 может быть вычислен по формуле:
Во втором варианте способа предусмотрено, что требуемые для расчета давления по формуле
значения площади АК поршня, объема V0, модуля К сжатия, а также зависимых от времени движения К поршня и движения Z цилиндра определяются следующим образом:
а) расчет площади АК осуществляется путем измерения диаметра поршня;
б) модуль К сжатия устанавливается с помощью используемой текучей среды и с помощью документированных табличных значений;
в) определяются зависимые от времени движение К поршня и движение Z цилиндра. Это может осуществляться за счет отдельного измерения их ускорений К и Z, а затем с помощью уравнений:
и
Определение объема V0 осуществляется с использованием необязательно динамически, однако обязательно статически калиброванного датчика давления. С целью определения объема V0 жидкая среда заменяется газообразной средой. Таким образом, проводятся два измерения статических давлений р1 и р2 в цилиндре, между которыми исходный объем изменяется на величину ΔV. При этом сначала проводится первое измерение, на основании которого на датчике давления определяется статический исходный параметр U1. Затем объем цилиндра изменяется на величину ΔV, и проводится второе измерение статического исходного параметра U2. После этого объем V0 вычисляется по формуле:
 .
.
В одном варианте способа предусмотрено, что посредством отдельного регулировочного поршня площадью AVK, совершающего регулировочное движение с регулировочным путем ΔхVK, объем V0 изменяется и вычисляется по формуле:
 .
.
В третьем варианте способа может отпасть затратное определение объема V0, необходимое в первом и втором вариантах. При этом создаются зависимые от времени движение К поршня и движение Z цилиндра и регистрируются посредством измерительной системы. Динамическая функция давления вычисляется по формуле:
причем все постоянные величины объединяются в C1, т.е.:
Без раздельного определения отдельных величин С1 определяется в целом. Это осуществляется за счет двух статических измерений давления обязательно статически калиброванного датчика в отношении к данному смещению ΔхК поршня и смещению ΔхZ цилиндра, которые также измеряются. На этой основе определяются разность Δр давлений, смещение ΔхК поршня и смещение ΔхZ цилиндра, а С1 вычисляется по формуле:
Смещение ΔхК поршня и смещение ΔхZ цилиндра можно выбрать также с ΔхК >> ΔхZ, причем отличие составляет, по меньшей мере, один порядок. Зависимая от времени функция давления определяется тогда с использованием уравнения:
причем С1 определяется за счет двух статических измерений давления обязательно статически калиброванного датчика в отношении к данному смещению ΔхК поршня, а разность Δр давлений и С1 вычисляются по формуле:
Изобретение позволяет динамически первично калибровать датчик давления. Таким образом, предложенное решение предусматривает также, что такой первично калиброванный датчик с известным калибровочным значением с используется в качестве первого датчика давления для вторичной калибровки второго датчика давления. Следовательно, значительно уменьшаются затраты на устройство и способ.
Изобретение более подробно поясняется ниже на примерах его осуществления. На прилагаемых чертежах изображают:
фиг. 1 - частотную характеристику датчика колебаний с отклонением по отношению к чувствительности при 160 Гц;
фиг. 2 - принцип функционирования вторичной калибровки;
фиг. 3 - пьезоэлектрический генератор давления в соответствии с уровнем техники;
фиг. 4 - механическую эквивалентную схему генератора давления в соответствии с уровнем техники;
фиг. 5 - схематично влияние соединения с фундаментом в соответствии с уровнем техники;
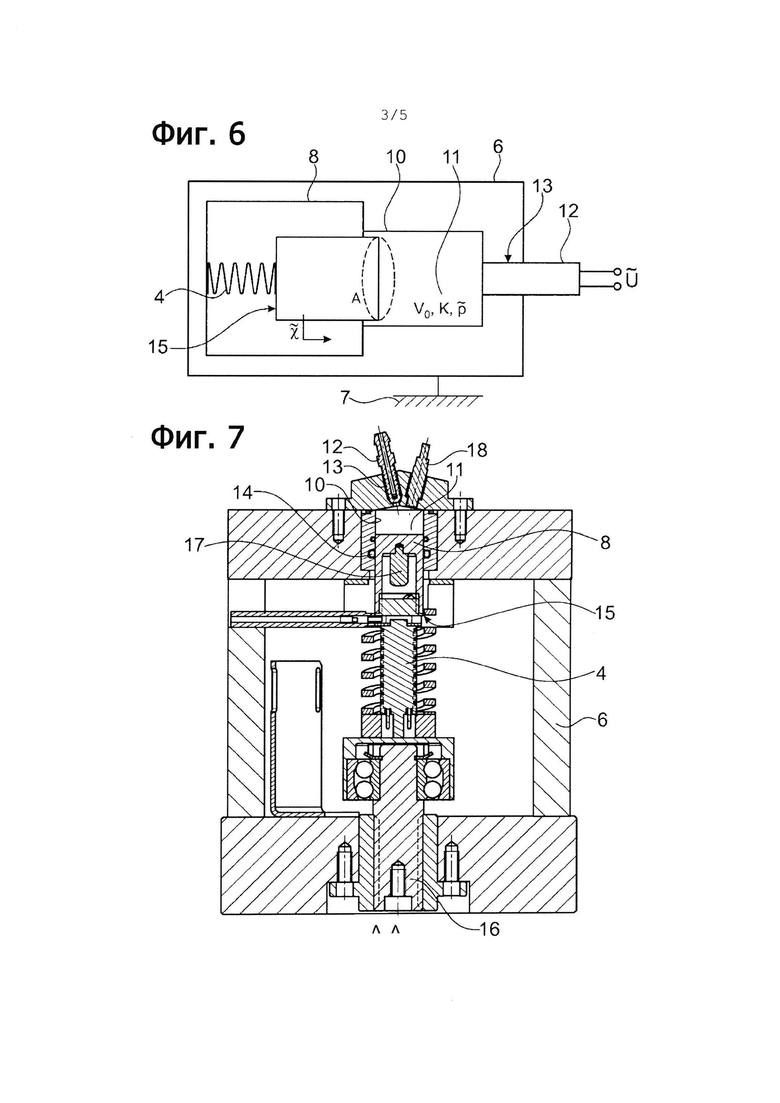
фиг. 6 - схематично принцип функционирования предложенного решения;
фиг. 7 - конструкцию предложенного калибровочного устройства в соответствии с первым примером;
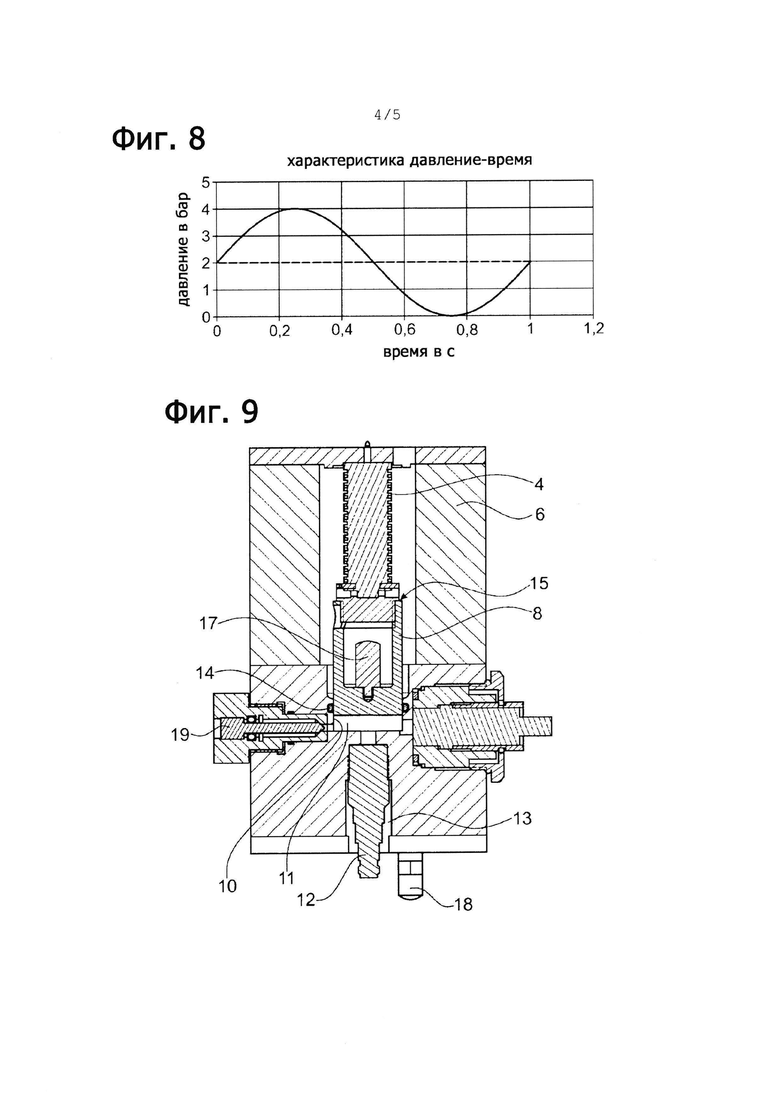
фиг. 8 - характеристику давление-время динамического нагружения давлением калибруемого датчика давления;
фиг. 9 - конструкцию предложенного калибровочного устройства в соответствии со вторым примером;
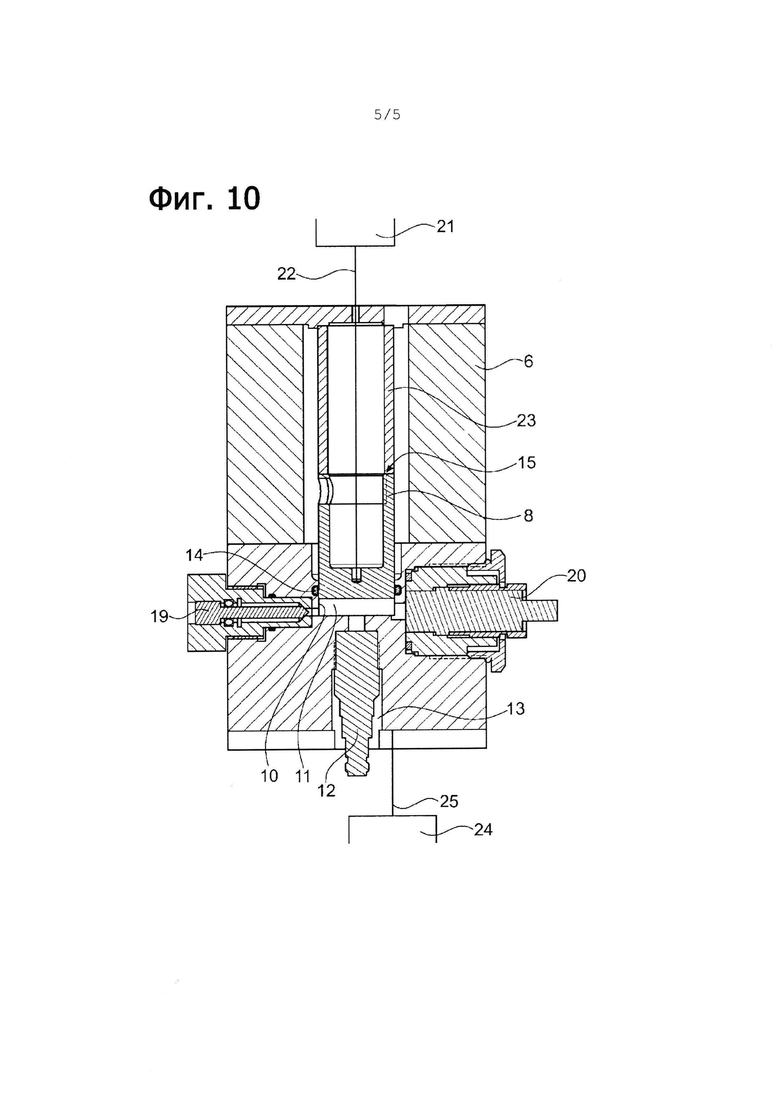
фиг. 10 - конструкцию предложенного калибровочного устройства в соответствии с третьим примером.
На фиг. 6 изображен принцип предложенного решения. Устройство содержит корпус 6 и соединенный с корпусом цилиндр 10 для размещения текучей среды 11, в частности масла, такого как гидравлическое масло. Цилиндр 10 выполнен с возможностью соединения с первым датчиком 12 давления. Он может быть соединен с цилиндром 10 через первое отверстие 13, в частности резьбовое отверстие, и находится, тем самым, в контакте с текучей средой 11. Первый датчик 12 давления является датчиком, который должен быть первично калиброван.
Далее предусмотрен поршень 8, взаимодействующий с цилиндром 10 таким образом, что он герметизирован в нем от окружающей атмосферы посредством уплотнения 14 и подвижно расположен в уплотнении 14. Таким образом, поршень 8 может давить непосредственно на текучую среду 11 и устанавливать в цилиндре 10 давление. Поршень приводится в движение пьезоэлектрическим актором 4, который расположен между корпусом 6 и обращенной от цилиндра 10 стороной 15 поршня 8.
Устройство не имеет соединения с большей массой, в частности фундаментом. Таким образом, оно статически определено только соединением корпуса 6 с актором 4 и актора 4 с поршнем 8.
Используемый актор 4 преобразует входной сигнал в механическую деформацию, которая в виде механического движения передается на поршень 8.
Конструкция предложенного устройства, изображенная на фиг. 7, содержит все элементы, как они показаны на фиг. 6. Одинаковыми ссылочными позициями обозначены одинаковые элементы, такие как корпус 6, поршень 8, цилиндр 10, текучая среда 11, первый датчик 12 давления, первое отверстие 13, уплотнение 14 и обращенная от цилиндра сторона 15 поршня 8. Дополнительно предусмотрен действующий на актор 4 линейный шпиндель 16, который устанавливает в цилиндре 10 начальное давление. На него затем накладывается динамическое давление, создаваемое актором 4. Таким образом, может быть создан изображенный на фиг. 8 профиль давления.
Вследствие различных влияний желательно, чтобы масляный объем был очень маленьким для повышения точности конструкции. Однако это означает, напротив, что уже при очень малом пути поршня (≈ 0,1 мкм) создаются достаточно высокие давления. Измерение этого пути с достаточной точностью является большим вызовом. Поэтому, согласно изобретению, предложено использовать датчики 17, 18 колебаний. Они могут быть калиброваны очень точно. С помощью измеренных ускорений можно тогда вычислить искомые пути.
Регистрирующая движение поршня относительно цилиндра измерительная система состоит поэтому из первого датчика 17 колебаний, соединенного с поршнем, и второго датчика 18 колебаний, соединенного с корпусом. Определение пути поршня осуществляется посредством подаваемых датчиками 17, 18 колебаний выходных сигналов. Определение зависимого от времени движения К поршня осуществляется посредством эквивалентного ускорению выходного сигнала первого датчика 17 колебаний, а движение Z цилиндра определяется посредством эквивалентного ускорению выходного сигнала второго датчика 18 колебаний. Это осуществляется за счет отдельного измерения их ускорений К и Z, а затем с помощью уравнений:
и
В зависимости от чувствительности датчика измерение пути возможно только начиная с достаточно высоких частот. Из-за ограниченного конструктивного пространства в поршне можно использовать лишь очень маленький датчик.
Расчет давления для калибровки первого датчика 12 давления происходит в этом примере, как это описано под «первым вариантом способа».
Когда первый датчик 12 давления первично динамически калиброван, он может использоваться в качестве эталонного датчика для второго датчика 20 давления для вторичной калибровки.
Конструкция предложенного устройства, изображенная на фиг. 9, содержит все элементы, как они показаны в принципиальном виде на фиг. 6. Одинаковыми ссылочными позициями обозначены одинаковые элементы, такие как корпус 6, поршень 8, цилиндр 10, текучая среда 11, первый датчик 12 давления, первое отверстие 13, уплотнение 14 и обращенная от цилиндра сторона 15 поршня 8. Дополнительно предусмотрен действующий на цилиндр 10 регулировочный поршень 19, который устанавливает в цилиндре 10 начальное давление. На него затем накладывается динамическое давление, создаваемое актором 4. Таким образом, может быть создан изображенный на фиг. 8 профиль давления.
Определение зависимого от времени движения К поршня осуществляется и в этом примере посредством эквивалентного ускорению выходного сигнала первого датчика 17 колебаний, а движение Z цилиндра определяется посредством эквивалентного ускорению выходного сигнала второго датчика 18 колебаний. Это осуществляется за счет отдельного измерения их ускорений К и Z, а затем с помощью уравнений:
и
Здесь следует упомянуть, что движение цилиндра может быть иногда намного меньшим и для достаточной точности пренебрежимо меньшим, чем движение поршня. В этом случае можно отказаться от определения движения Z цилиндра. Тогда может отпасть также второй датчик 18 колебаний.
Расчет давления для калибровки первого датчика 12 давления происходит в примере на фиг. 9, как это описано под «вторым вариантом способа».
Конструкция предложенного устройства, изображенная на фиг. 10, содержит все элементы, как они показаны в принципиальном виде на фиг. 6. Одинаковыми ссылочными позициями обозначены одинаковые элементы, такие как корпус 6, поршень 8, цилиндр 10, текучая среда 11, первый датчик 12 давления, первое отверстие 13, уплотнение 14 и обращенная от цилиндра сторона 15 поршня 8. Дополнительно предусмотрен действующий на цилиндр 10 регулировочный поршень 19, который устанавливает в цилиндре 10 начальное давление. На него затем накладывается динамическое давление, создаваемое актором 4. Таким образом, может быть создан изображенный на фиг. 8 профиль давления.
Целью примера на фиг. 10 является расширение частотного диапазона, который до сих пор ограничен используемыми в примерах на фиг. 7, 9 датчиками 17, 18 колебаний. В частности, частотный диапазон должен быть расширен в направлении малых частот до f = 0 Гц. Поскольку имеются методы статической калибровки датчиков давления, с расширением частотного диапазона до f = 0 Гц возможны присоединение динамического способа к статическому и, тем самым, также сравнение полученных значений.
Чтобы достичь этого, в примере на фиг. 10 датчики 17, 18 колебаний на фиг. 7, 9 были заменены первым 21 и вторым 24 лазерными виброметрами. Они способны измерять намного меньшие ускорения, чем упомянутые датчики 17, 18 колебаний.
Чтобы направить лазерный луч 22 лазерного виброметра 21 непосредственно на поршень, актор 4 выполнен в виде полого актора 23. Лазерный луч 25 второго лазерного виброметра 24 попадает непосредственно на корпус 6.
Кроме того, лазерный виброметр 21 способен с очень высокой точностью проводить также статические измерения смещения поршня. Это является существенным преимуществом по сравнению с описанными примерами. То же относится ко второму лазерному виброметру 24.
Расчет давления для калибровки первого датчика 12 давления происходит в примере на фиг. 10, как это описано под «третьим вариантом способа».
Также здесь можно при наличии динамической первичной калибровки первого датчика 12 давления динамически вторично калибровать второй датчик 20 давления. При такой вторичной калибровке лазерные виброметры 21, 24 могут тогда отпасть.
Особенности изобретения можно обобщить следующим образом:
- используется пистонфон (система поршень-цилиндр);
- реализована свободная двухмассовая колебательная система;
- обеспечиваются движения поршня 8 и корпуса 6;
- в двух точках измеряются смещения поршня 8 и корпуса 6;
- речь идет о статически определенной системе, поскольку поршень 8 и корпус 6 соединены соответственно только корпусом 6 и самим актором 4. Для этого используется уплотнение 14, в частности эластомерное уплотнение;
- предусмотрен регулировочный поршень 19, с помощью которого возможно создание статического повышения давления. Статическое повышение давления обязательно требуется, чтобы:
- создавать амплитуды давления более 1 бар и
- создавать определенные условия калибровки в конструкции (в частности, достигать определенного модуля К сжатия).
Перечень ссылочных позиций
1 – коромысло
2 – контрольный объем
3 – мембрана
4 – актор
6 – корпус
7 - фундамент
8 – поршень
9 – траверса
10 – цилиндр
11 – текучая среда
12 – первый датчик давления
13 – первое отверстие
14 – уплотнение
15 – обращенная от цилиндра сторона поршня
16 – линейный шпиндель
17 – первый датчик колебаний
18 – второй датчик колебаний
19 – регулировочный поршень
20 – второй датчик давления
21 – лазерный виброметр
22 – лазерный луч
23 – полый актор
24 – второй лазерный виброметр
25 – лазерный луч второго лазерного виброметра
В основе изобретения, касающегося устройства и способа динамической калибровки датчиков давления, причем посредством устройства по принципу пистонфона давление, воздействующее на датчик давления, сравнивается с соответствующим заданным параметром, на основе чего определяется калибровочное значение с, лежит задача создания решения, которое обеспечивало бы первичную калибровку динамического поведения датчика давления. Эта задача решается за счет того, что устройство статически определено только за счет соответствующего соединения корпус – актуатор и актуатор – поршень, а поршень герметизирован в цилиндре от окружающей атмосферы посредством уплотнения и подвижно расположен в уплотнении, и вычисляется соответствующее фактическому значению изменение давления. Технический результат – создание способа и устройства первичной динамической калибровки датчиков давления. 2 н. и 16 з.п. ф-лы, 10 ил.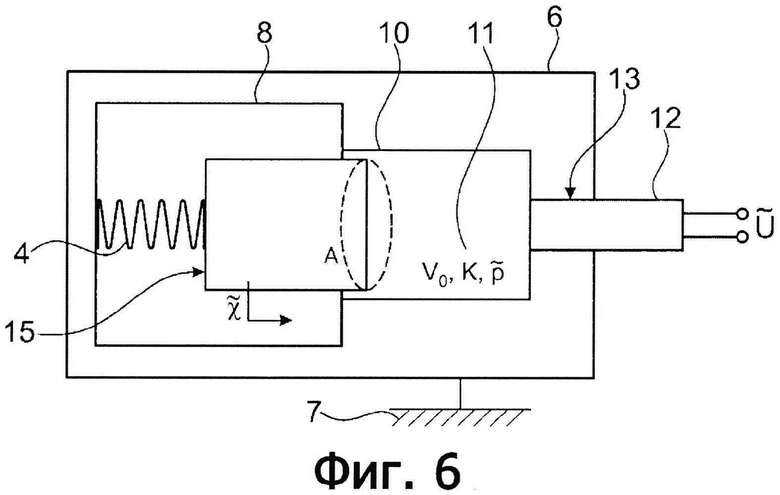
1. Устройство для динамической калибровки датчиков давления, содержащее корпус (6), соединенный с корпусом (6) цилиндр (10) для размещения текучей среды (11), выполненный с возможностью соединения через первое отверстие (13) с первым датчиком (12) давления, находящимся, тем самым, в контакте с текучей средой (11), актуатор (4) и выполненный с возможностью взаимодействия с цилиндром (10) поршень (8), причем актуатор (4) расположен между корпусом (6) и обращенной от цилиндра (10) стороной (15) поршня (8), отличающееся тем,
- что оно статически определено только за счет соответствующего соединения корпус (6) - актуатор (4) и актуатор (4) - поршень (8), не имея никакого соединения с большей массой, в частности никакого соединения с фундаментом,
- актуатор выполнен в виде пьезоэлектрического актуатора,
а поршень (8) герметизирован в цилиндре (10) от окружающей атмосферы посредством уплотнения (14) и подвижно расположен в уплотнении (14).
2. Устройство по п. 1, отличающееся тем, что при использовании для первичной калибровки предусмотрена измерительная система (17, 18), выполненная с возможностью регистрации движения поршня (8) относительно корпуса (6).
3. Устройство по п. 2, отличающееся тем, что измерительная система (17, 18) выполнена с возможностью регистрации как динамических, так и статических движений.
4. Устройство по п. 2 или 3, отличающееся тем, что измерительная система выполнена в виде калиброванного датчика (17, 18) колебаний или в виде лазерного виброметра (21, 24) с декодером скорости и пути.
5. Устройство по п. 4, отличающееся тем, что актуатор (4) выполнен в виде полого актуатора (23) с лучевой проводкой, через которую лазерный виброметр (21) направлен на поршень.
6. Устройство по п. 1, отличающееся тем, что при использовании для вторичной калибровки цилиндр (10) для размещения текучей среды выполнен с возможностью соединения с вторично калибруемым вторым датчиком (20) давления.
7. Устройство по любому из пп. 1-4, отличающееся тем, что предусмотрен линейный шпиндель (16), выполненный с возможностью создания в цилиндре (10) статического начального давления.
8. Устройство по любому из пп. 1-4, отличающееся тем, что предусмотрен второй цилиндр, в котором расположен герметизированный от окружающей атмосферы подвижный регулировочный поршень (19).
9. Способ динамической калибровки датчиков давления, при котором измеряют представляющий воздействующее на датчик (12) давления давление фактический параметр, и сравнивают с соответствующим заданным параметром, и на основе сравнения определяют калибровочное значение с для фактического параметра, причем давление создают посредством поршня (8), выполненного с возможностью взаимодействия с цилиндром (10), заполненным текучей средой (11), отличающийся тем, что соответствующее фактическому значению изменение Δр давления вычисляют посредством значения К сжатия текучей среды, активной площади АК давления, заполненного текучей средой объема V0 цилиндра, перемещения ΔхК поршня и перемещения ΔхZ цилиндра по формуле:
10. Способ по п. 9, отличающийся тем, что давление рn вычисляют для различных перемещений хК(1) … хК(n) поршня и перемещений хZ(1) … xZ(n) цилиндра по формуле:
 ,
, .
.
11. Способ по п. 9 или 10, отличающийся тем, что перемещение ΔхК поршня и перемещение ΔхZ цилиндра создают динамически, т.е. в виде функции времени  К = dхК/dt и Z = dxZ/dt, а динамическую функцию давления
К = dхК/dt и Z = dxZ/dt, а динамическую функцию давления  = dp/dt вычисляют по формуле:
= dp/dt вычисляют по формуле:
 .
.
12. Способ по п. 11, отличающийся тем, что К и Z создают в виде синусоидальной функции с частотой f.
13. Способ по п. 12, отличающийся тем, что К и Z создают с переменной частотой, т.е. К(f) и Z(f), а калибровочное значение - путем расчета зависимого от частоты давления (f) в виде функции с(f).
14. Способ по любому из пп. 9-13, отличающийся тем, что
- на давление в цилиндре (10) накладывают динамическое давление, которое создают посредством актуатора (4),
- определение величин площадь А поршня, объем V0, модуль К сжатия и зависимые от времени движение К поршня и движение Z цилиндра осуществляют посредством
- расчета площади А путем измерения диаметра поршня (8),
- установления модуля К сжатия с помощью используемой текучей среды (11), документированных табличных значений,
- определения зависимых от времени движения К поршня и движения Z цилиндра,
- расчета объема V0 с использованием необязательно динамически калиброванного датчика (12, 20) давления, причем проводят два измерения динамического выходного сигнала  датчика давления в цилиндре (10), между которыми изменяют исходный объем, однако статическое начальное давление, представленное статическим выходным сигналом U на датчике (12; 20) давления, устанавливают таким же, причем сначала проводят первое измерение, причем измеряют движение К1 поршня и движение Z1 цилиндра и на датчике (12; 20) давления определяют динамический исходный параметр 1 при частоте f1, затем объем цилиндра изменяют на величину ΔV, после чего проводят второе измерение динамического исходного параметра 2 при той же частоте f2 = f1, причем измеряют движение К2 поршня и движение Z2 цилиндра, которые необходимы, чтобы получить на датчике давления тот же динамический исходный параметр, т.е. 1 = 2, а затем объем V0 вычисляют по формуле:
датчика давления в цилиндре (10), между которыми изменяют исходный объем, однако статическое начальное давление, представленное статическим выходным сигналом U на датчике (12; 20) давления, устанавливают таким же, причем сначала проводят первое измерение, причем измеряют движение К1 поршня и движение Z1 цилиндра и на датчике (12; 20) давления определяют динамический исходный параметр 1 при частоте f1, затем объем цилиндра изменяют на величину ΔV, после чего проводят второе измерение динамического исходного параметра 2 при той же частоте f2 = f1, причем измеряют движение К2 поршня и движение Z2 цилиндра, которые необходимы, чтобы получить на датчике давления тот же динамический исходный параметр, т.е. 1 = 2, а затем объем V0 вычисляют по формуле:
 .
.
15. Способ по любому из пп. 8-13, отличающийся тем, что определение величин площадь А поршня, объем V0, модуль К сжатия и зависимые от времени движение К поршня и движение Z цилиндра осуществляют посредством
- расчета площади А путем измерения диаметра поршня (8),
- установления модуля К сжатия с помощью используемой текучей среды (11), посредством документированных табличных значений,
- определения зависимых от времени движения К поршня и движения Z цилиндра,
- расчета объема V0 с использованием необязательно динамически, однако обязательно статически калиброванного датчика (12; 20) давления,
- причем с целью определения объема V0 жидкую среду заменяют газообразной средой,
- проводят два измерения статических давлений р1 и р2 в цилиндре, между которыми исходный объем изменяют на величину ΔV, причем сначала проводят первое измерение, на основании которого на датчике (12; 20) давления определяют статический исходный параметр U1, объем цилиндра (10) изменяют на величину ΔV, проводят второе измерение статического исходного параметра U2 и объем V0 вычисляют по формуле:
 .
.
16. Способ по п. 15, отличающийся тем, что посредством отдельного регулировочного поршня (19) площадью AVK, совершающего регулировочное движение с регулировочным путем ΔхVK, объем V0 изменяют и вычисляют по формуле:
 .
.
17. Способ по любому из пп. 9-13, отличающийся тем, что создают зависимые от времени движение К поршня и движение Z цилиндра и регистрируют посредством измерительной системы (17, 18), а динамическую функцию давления вычисляют по формуле:
 ,
,
причем С1 определяют за счет двух статических измерений давления обязательно статически калиброванного датчика (12; 20) давления в отношении к данному смещению ΔхК поршня и смещению ΔхZ цилиндра и на этой основе определяют разность Δр давлений, смещение ΔхК поршня и смещение ΔхZ цилиндра, а С1 вычисляют по формуле:
18. Способ по любому из пп. 9-17, отличающийся тем, что первично калиброванный по нему датчик (12) с известным калибровочным значением с используют в качестве первого датчика (12) давления для вторичной калибровки второго датчика (20) давления.
| US 3590626 A1, 06.07.1971 | |||
| Контрольная касса | 1929 |
|
SU22347A1 |
| DE 10018493 C1, 31.10.2001 | |||
| DE 102009027624 A1, 14.01.2010. | |||

