Изобретение относится к области железнодорожного транспорта, а именно к устройствам формирования информационной модели поезда с обозначением от головной части поезда порядкового номера подвижной единицы, типа подвижной единицы (локомотив это или вагон), количества ее колесных пар (КП) и порядкового номера каждой КП поезда относительно первой КП от его головной части.
Эта информация позволяет расширить функциональные возможности автоматизированных систем, применяемых на железнодорожном транспорте. В частности, появляется возможность относить к конкретным подвижным единицам (ПЕ) и КП поезда информацию, получаемую от перегонных устройств контроля тех или иных параметров ПЕ, информацию, считываемую с идентификаторов ПЕ и ее отдельных элементов, а также с идентификаторов грузов, перевозимых этими ПЕ.
Известны способ и устройство для определения порядковых номеров ПЕ движущегося железнодорожного состава на основе регистрации промежутка между ПЕ с использованием промышленных ИК или лазерных датчиков, например, фотоэлектрических датчиков Connect 3 серии W 18-3 WS/WE 18-3, МИК-02, Perimetr, РЕ30Р/РЕ60Р, Aleph АВТ-30/60/120, применяемых в системе Транзит - инспектор PRO [1], а также радиотехнического датчика РТД-С [2].
Недостатком этих способов и устройств является то, что их работа зависит от погодных условий, и/или они не позволяют определить порядковый номер ПЕ в случае, когда состав поезда совершает маневры с изменением направления движения.
Известны способ и устройство определения порядковых номеров вагонов движущегося железнодорожного состава на основе детектирования просветов между вагонами с использованием электромагнитного излучения, в которых обеспечивается независимость работы от изменения направлений движения состава поезда и от погодных условий (см., например, патент RU 2627254, опубл. 04.08.2017, МПК B61L 1/16, или патент US 8655540, опубл. 18.02.2014, МПК B61L 1/16).
Недостатком этих технических решений является то, что в них не определяется тип подвижной единицы поезда (локомотив это или вагон). А это необходимо определять, например, при построении автоматизированных систем закрепления состава поезда на станционных путях.
Известен также способ формирования информационной модели поезда, движущегося по контрольному участку считывания параметров поезда, с определением от головы поезда порядкового номера и типа каждой подвижной единицы (локомотив это, грузовой вагон, рефрижератор или др.), количества колесных пар в каждой подвижной единице и порядкового номера каждой колесной пары подвижной единицы относительно первой колесной пары от головы поезда - патент DE 10064598 на изобретение «Railway train configuration data set generation method identifies different wagon types from their measured axle  », опубл. 18.07.2002, МПК B61L 1/16; B61L 25/02, в котором «осуществляется набор данных, идентифицирующих типы вагонов в железнодорожном составе и их относительные положения, путем измерения расстояний между осями колесных пар поезда и сравнением измеренных значений с предварительно сохраненными в памяти контроллера значениями расстояний между осями, характерными для разных известных типов вагонов». Межосевые расстояния в проходящих подвижных единицах поезда в этом способе измеряют с помощью двух рельсовых датчиков колеса (РД), расположенных вдоль участка пути на некотором расстоянии «В» меньшем минимально возможного межосевого расстояния всех существующих на сегодня железнодорожных подвижных единиц.
», опубл. 18.07.2002, МПК B61L 1/16; B61L 25/02, в котором «осуществляется набор данных, идентифицирующих типы вагонов в железнодорожном составе и их относительные положения, путем измерения расстояний между осями колесных пар поезда и сравнением измеренных значений с предварительно сохраненными в памяти контроллера значениями расстояний между осями, характерными для разных известных типов вагонов». Межосевые расстояния в проходящих подвижных единицах поезда в этом способе измеряют с помощью двух рельсовых датчиков колеса (РД), расположенных вдоль участка пути на некотором расстоянии «В» меньшем минимально возможного межосевого расстояния всех существующих на сегодня железнодорожных подвижных единиц.
Недостатком этого способа является зависимость надежности его работы от ускорений и возможной остановки поезда при движении по участку считывания параметров поезда.
Известно также устройство для счета подвижных единиц железнодорожного транспорта, надежность работы которого не зависит ни от погодных условий, ни от возможных ускорений, ни от остановки и смены направлений движения поезда при проходе по контрольному участку считывания параметров поезда (патент SU 1284870, опубл. 23.01.1987, МПК B61L 1/16; B61L 17/00). Устройство содержит реверсивные точечные путевые датчики, установленные на пути, блок фиксации проследования ПЕ, подключенный выходом к первому входу блока определения осности ПЕ, первый выход которого соединен с первым входом первого блока определения типа ПЕ, второй вход которого подключен к выходу первого блока фиксации признака подвижной единицы, устройство снабжено также блоками контроля свободности участка, триггером, элементами И, ИЛИ, ИЛИ-НЕ, дополнительными блоками фиксации признака подвижной единицы, дополнительными блоками определения типа подвижной единицы, и дополнительным реверсивным путевым датчиком, причем выходы первого, второго третьего и четвертого реверсивных точечных путевых датчиков подключены соответственно к первым входам соответствующих первого и второго блока контроля свободности участка, к второму и первому входам соответственно первого и третьего блоков контроля свободности участков, к первому входу блока фиксации проследования ПЕ, вторым входам блока определения осности и второго блока контроля свободности участка, к второму входу третьего блока контроля свободности участка, выходы первого и третьего блоков контроля свободности участка соединены с входами элемента ИЛИ-НЕ и с первыми входами соответственно первого и второго блоков фиксации признака ПЕ, второй, третий и четвертый входы каждого из которых подключены соответственно к выходу второго блока свободности участка, подключенного к первым входам триггера и второго блока определения типа ПЕ, к первому выходу триггера, подключенного к второму и третьему входам соответственно блока фиксации проследования ПЕ и блока определения осности и выходу блока фиксации проследования ПЕ, подключенного к первому входу третьего блока фиксации признака ПЕ, соединенного вторым входом к выходу элемента ИЛИ-НЕ, второму входу триггера, второй, третий и четвертый выходы блока определения осности соединены с первыми входами соответственно элемента И, первого элемента ИЛИ и третьего блока определения типа ПЕ, первый и второй выходы и второй и третий входы которого подключены соответственно к первым входам второго и третьего элементов ИЛИ, к выходу второго блока фиксации признака ПЕ и к второму выходу триггера, подключенного к вторым входам элемента И и второго блока определения типа ПЕ, к третьим входам блока фиксации проследования ПЕ и первого блока определения типа ПЕ, первый и второй выходы которого соединены с вторыми входами соответственно второго и первого элементов ИЛИ, последний из которых связан выходом с третьим входом второго блока определения типа ПЕ, четвертый вход и первый и второй выходы которого соединены соответственно с выходом третьего блока фиксации признака ПЕ и с третьим и со вторым входами соответственно второго и третьего элементов ИЛИ, третий вход последнего соединен с выходом элемента И. Данное устройство принято за прототип.
Недостатками прототипа являются большое количество используемого оборудования и ограниченные функциональные возможности его применения. Так, в прототипе сказано, что «расстояние между датчиками 1 и 4 (4,7 м) равно сумме расстояний между датчиками 1 и 2 и 2 и 4 и, вместе с тем, меньше минимального расстояния между колесными тележками ПЕ (далее - тележки) четырехосных и восьмиосных вагонов и больше максимального расстояния между тележками восьмиосных локомотивов и четырехосных тепловозов». Это утверждение не справедливо для четырехосных вагонов моделей 20-480, 12-4094, 20-4078, 20-9916-01 и для восьмиосных вагонов моделей 22-466, 22-4024, а также для локомотивов серии ТГ16. При наличии перечисленных подвижных единиц в составе поезда устройство, описанное в прототипе будет выдавать ложный результат, и, следовательно, не может использоваться. Кроме того, прототип не позволяет определять подвижные единицы с тремя тележками, производство которых было освоено в последнее время.
Техническим результатом заявляемого изобретения является расширение функциональных возможностей применения способа формирования информационной модели поезда, движущегося по контрольному участку считывания параметров поезда, и повышение надежности его работы.
Заявляемый технический результат достигается тем, что в способе формирования информационной модели поезда, включающем использование пункта считывания параметров поезда, в составе которого используют несколько контрольных участков пути, ограниченных реверсивными датчиками колеса, расположенными на пути следования поезда и подключенными к соответствующим входам блока обработки данных, осуществляющего анализ последовательностей занятия и освобождения контрольных участков колесными парами подвижного состава, по результатам которого определяют принадлежность каждой колесной пары той или иной подвижной единице, соответственно для каждой подвижной единицы, проследовавшей через пункт считывания параметров поезда, подсчитывают количество принадлежащих ей колесных пар, определяют базу тележек и осевую формулу подвижной единицы, по которым определяют тип каждой подвижной единицы - локомотив это или вагон, согласно изобретению используют, по меньшей мере, три контрольных участка пути, ограниченных реверсивными датчиками колеса: КУ3, длиной 7600 мм, ограниченный четвертым и первым РД, КУ2, длиной 3600 мм, ограниченный третьим и первым РД, и КУ1, длиной 2600 мм, ограниченный вторым и первым РД, при этом при присвоении очередного порядкового номера подвижной единице, считая от головной части поезда, учитывают количество ее колесных пар, а также порядковый номер каждой колесной пары этой подвижной единицы относительно первой колесной пары по счету от головной части поезда.
Заявляемый способ формирования информационной модели поезда поясняется чертежами, приведенными на фиг. 1, 2.
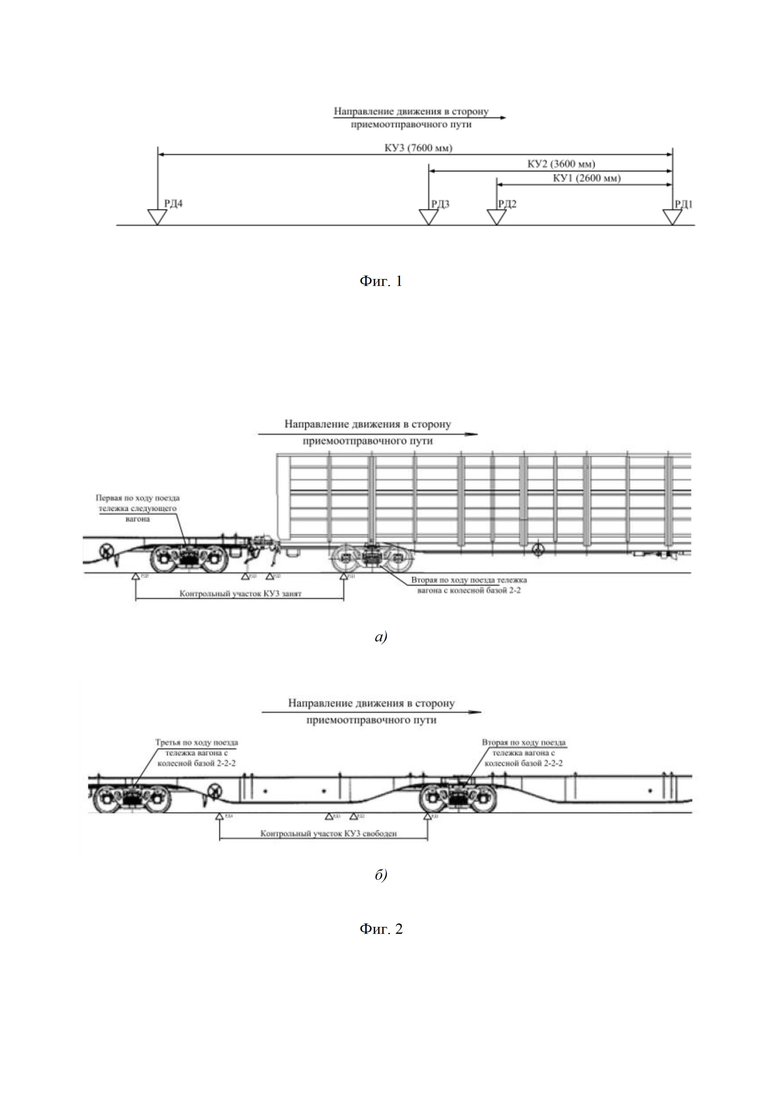
На фиг. 1 показано размещение реверсивных рельсовых датчиков колеса и соответствующих контрольных участков пути в пункте считывания параметров поезда. Используется три контрольных участка пути КУ3, КУ2, КУ1 и четыре РД. Показано взаимное расположение и расстояния между реверсивными датчиками колеса вдоль пути следования поезда. Все рельсовые датчики подключены к соответствующим входам блока обработки данных (на чертеже не показан).
На фиг. 2 приводятся примеры положения колесных пар относительно РД1-РД4 в момент подтверждения факта проследования пункта считывания параметров поезда вагонов с колесной формулой 2-2 (вагон с двумя тележками справа) (фиг. 2а) и 2-2-2 (вагон с тремя тележками) (фиг. 2б).
Реверсивные датчики колеса пункта считывания параметров поезда могут быть установлены на одной и/или двух рельсовых линиях одного отдельно взятого неразветвленного участка пути.
РД подключают к соответствующим входам блока обработки данных (на чертеже не показан), осуществляющего анализ последовательности занятия и освобождения контрольных участков колесными парами подвижного состава.
По результатам анализа последовательности занятия и освобождения колесными парами соответствующих контрольных участков пункта считывания параметров поезда и анализа количества подсчитанных осей (колесных пар) соответствующими РД в момент покидания очередной подвижной единицей пункта считывания параметров поезда для каждой подвижной единицы:
- определяют порядковый номер этой ПЕ относительно головной части поезда;
- подсчитывают количество КП, принадлежащих этой ПЕ;
- определяют порядковый номер каждой КП этой ПЕ относительно первой КП поезда;
- определяют базу тележек и осевую формулу ПЕ;
- определяют тип каждой подвижной единицы - локомотив это или вагон.
Принцип действия предлагаемого способа формирования модели поезда, проходящего через пункт считывания параметров поезда, основан на следующих положениях.
При определении принадлежности КП к той или иной ПЕ в блоке обработки данных используют следующие особенности взаимного расположения КП в существующем парке железнодорожных ПЕ:
а) группы (тележки) КП каждой ПЕ расположены симметрично относительно середины ПЕ, соответственно число КП в составе любой ПЕ всегда четное;
б) в пределах одной ПЕ расстояние между группами КП (между тележками ПЕ) всегда больше расстояния между КП внутри любой группы КП (здесь и далее под расстоянием между КП подразумевается расстояние между осями КП).
Способ определения принадлежности КП тем или иным ПЕ основан на селекции тележек ПЕ по их базе с помощью контрольных участков КУ1, КУ2 и КУ3. При этом КУ3 подтверждает проход двухосной тележки любой ПЕ (локомотивов, пассажирских, рефрижераторных и грузовых вагонов), КУ2 - проход тележек пассажирских, рефрижераторных и грузовых вагонов, а КУ1 - проход тележек только грузовых вагонов.
Данные, получаемые от КУ1-КУ3, обрабатываются не в режиме реального времени, а после проследования всех КП поезда за РД1. Таким образом обеспечивается возможность анализа всего полученного массива данных с целью обнаружения и коррекции ошибок, которые могут иметь место, например, из-за сбоев в работе рельсовых датчиков.
Принципы определения принадлежности КП и тележек локомотивам и вагонам в блоке обработки данных следующие.
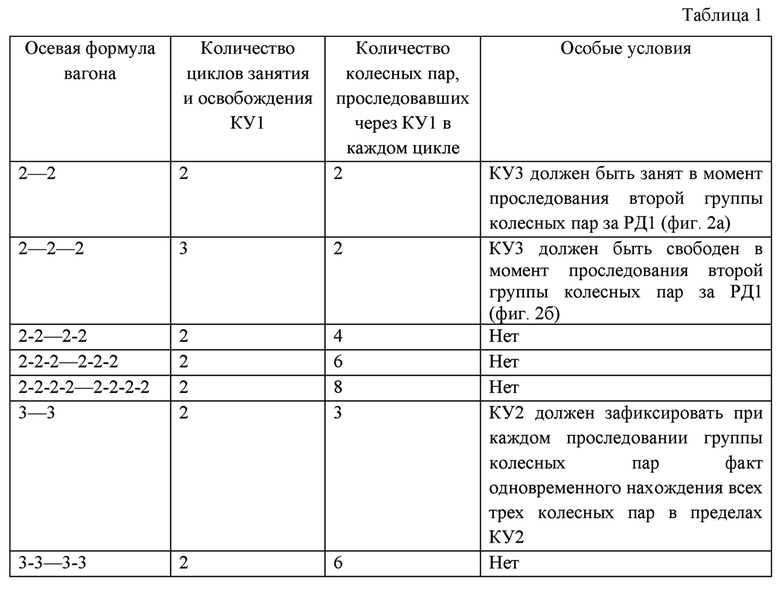
Все вагоны с осевыми формулами 2-2, 2-2-2-2, 2-2-2-2-2-2, 2-2-2-2-2-2-2-2 имеют базы тележек величиной до 2500 мм. Поэтому для определения принадлежности КП вагонам с вышеуказанными осевыми формулами достаточно получить данные о том, что КУ1 (длиной 2600 мм) дважды занимался и освобождался группами двух, трех, четырех, шести или восьми КП, проследовавшими в сторону приемоотправочного пути. Условия определения принадлежности КП вагонам с осевыми формулами 2-2, 2-2-2-2, 2-2-2-2-2-2, 2-2-2-2-2-2-2-2 и 3-3, 3-3-3-3 приведены в таблице 1.
Для определения принадлежности КП вагонам моделей 13-9851, 13-470-01 используется следующая особенность (Фиг. 2): расстояние между любыми соседними группами КП вышеуказанных моделей вагонов превышает 10175 мм, что больше, чем расстояние от крайней КП любого из вагонов моделей 13-9851, 13-470-01 до ближайшей КП любой ПЕ, сцепленной с данным вагоном (которое не более 4766 мм). Одновременно расстояние от крайней КП любого из вагонов моделей 13-9851, 13-470-01 до ближайшей КП любой ПЕ меньше, чем расстояние между датчиками РД4 и РД1. Когда КП предшествующей ПЕ покидает пункт считывания параметров поезда (КУ1), КУ3 всегда занят последующей ПЕ, за исключением случая, когда последняя ПЕ поезда покидает пункт считывания параметров поезда.
Таким образом, назначение КУ1-КУ3 следующее:
- КУ1 (длина 2600 мм), ограниченный РД2 и РД1, предназначен для выполнения следующих функций:
а) определение принадлежности колесных пар подвижной единице с двухосными тележками, база которых не превышает 2600 мм, или подвижной единице с трехосными тележками, в которых расстояние между любыми смежными КП не превышает 2600 мм;
б) подтверждение факта проследования в составе поезда вагона с любой из осевых формул 2-2, 2-2-2-2, 2-2-2-2-2-2, 2-2-2-2-2-2-2-2;
в) во взаимодействии с КУ3-подтверждение факта проследования в составе поезда грузового вагона с любой из осевых формул 3-3, 3-3-3-3;
г) во взаимодействии с КУ3-подтверждение проследования в составе прибывающего поезда любого грузового вагона с осевой формулой 2-2-2;
- КУ2 (длина 3600 мм), ограниченный РДЗ и РД1, предназначен для:
а) взаимодействия с КУ1 с целью определения принадлежности КП вагонам с осевой формулой 3-3 (базы тележек 3400 мм или 3500 мм);
б) определения принадлежности КП тележкам локомотивов с осевой формулой 2-2 или 2-2-2.
- КУ3 (длина 7600 мм), ограниченный РД4 и РД1, предназначен для взаимодействия с КУ1 с целью определения принадлежности КП грузовым вагонам с осевой формулой 2-2-2.
Описанный способ формирования информационной модели поезда, движущегося через пункт считывания параметров поезда, позволяет определить практически все типы ПЕ в поезде, обращаемые на сети дорог РФ - магистральные локомотивы, все существующие типы вагонов с осевой формулой 2-2, 2-2-2, 2-2-2-2, 2-2-2-2-2-2, 2-2-2-2-2-2-2-2, 3-3, 3-3-3-3.
Одновременно с определением типа подвижных единиц пункт считывания параметров поезда определяет количество КП в каждой ПЕ и в поезде в целом. Количество КП, принадлежащих всему поезду, определяется количеством КП, подсчитанных рельсовыми датчиками к моменту освобождения поездом пункта считывания параметров поезда. Количество КП, принадлежащих каждой ПЕ, определяется по ее осевой формуле. При этом данные от РД обрабатываются не в реальном масштабе времени, а когда весь поезд уходит за пределы пункта считывания параметров поезда. Работа устройства происходит следующим образом.
Во время следования поезда по участку, в пределах которого оборудован пункт считывания параметров поезда, идет регистрация и накопление данных о последовательности занятия и освобождения контрольных участков пути от КУ3 до КУ1 и о количестве колесных пар, прошедших над соответствующими реверсивными датчиками колеса при занятии и освобождении каждого из контрольных участков. Когда поезд покидает участок, в пределах которого оборудован пункт считывания параметров поезда, блок обработки данных начинает анализ накопленных данных в соответствии с вышеизложенными алгоритмами и формирование информационной модели поезда.
Предлагаемый способ формирования информационной модели поезда не предусматривает измерения межосевых расстояний в ПЕ. Это обеспечивает независимость получаемых результатов от скорости движения, допускается возможность остановки и временной смены направления движения поезда во время прохода отдельных ПЕ поезда через пункт считывания параметров поезда. Одновременно предлагаемый способ позволяет идентифицировать в составе поезда практически все типы железнодорожных единиц, эксплуатируемых на сети магистральных дорог РФ (то есть обладает расширенными функциональными возможностями относительно прототипа), используя при этом меньшее количество оборудования, чем в прототипе. Следовательно, способ обеспечивает увеличение надежности работы.
Таким образом, предложенное решение обладает лучшими характеристиками, чем все известные аналоги и прототип.
Хотя изобретение подробно пояснено с помощью предпочтительных вариантов выполнения, изобретение не ограничивается раскрытыми примерами, и специалистами в данной области техники могут быть частично изменены размеры указанных контрольных участков пути в пункте считывания параметров поезда и их количество, без выхода за объем защиты описанного изобретения.
Литература (ссылочные источники):
1. Транзит - инспектор PRO, Руководство пользователя, версия 4.3.2, стр. 68 [Интернет ресурс] http://inf.mpservice.com.ua/1.1/inspektor_video/gd_vagon.pdf
2. Датчик радиотехнический контроля свободности стрелочных участков РТД-С. Техническое описание и инструкция по эксплуатации, [Интернет ресурс] https://megaobuchalka.ru/1/21823.html.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА КОНТРОЛЯ ХОДОВЫХ ЧАСТЕЙ ВАГОНОВ | 2010 |
|
RU2450948C1 |
| СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ СВОБОДНОСТИ УЧАСТКОВ ПУТИ ОТ ПОДВИЖНОГО СОСТАВА | 2015 |
|
RU2600175C1 |
| СИСТЕМА СЛЕЖЕНИЯ ЗА АВАРИЙНО ГРЕЮЩИМИСЯ РОЛИКОВЫМИ БУКСОВЫМИ УЗЛАМИ КОЛЕСНЫХ ПАР ЖЕЛЕЗНОДОРОЖНЫХ ВАГОНОВ | 2007 |
|
RU2337029C1 |
| Система управления устройствами закрепления железнодорожного подвижного состава | 2017 |
|
RU2682519C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА КОНТРОЛЯ ХОДОВЫХ ЧАСТЕЙ ВАГОНОВ С АВТОМАТИЗИРОВАННЫМ РАБОЧИМ МЕСТОМ ОСМОТРЩИКА ВАГОНОВ ПРИ ВСТРЕЧЕ ПОЕЗДА "СХОДУ" | 2010 |
|
RU2450947C1 |
| СПОСОБ И СИСТЕМА МОНИТОРИНГА ПОДВИЖНОГО СОСТАВА | 2020 |
|
RU2744048C1 |
| СПОСОБ ИСПЫТАНИЙ ЭЛЕКТРОННЫХ УСТРОЙСТВ НА ОСНОВЕ АВТОМАТИЧЕСКОГО ФОРМИРОВАНИЯ ТЕСТОВ | 2022 |
|
RU2811421C1 |
| УСТРОЙСТВО СЧЕТА ВАГОНОВ | 2018 |
|
RU2683705C1 |
| РЕЛЬСОВАЯ ЦЕПЬ ДЛЯ КОНТРОЛЯ ЗАНЯТОСТИ БЛОК-УЧАСТКА И КАБЕЛЬНЫЙ ПЕТЛЕВОЙ ДАТЧИК КОНТРОЛЯ ПРОХОДА КОЛЕСНЫХ ПАР И ЕДИНИЦ ЖЕЛЕЗНОДОРОЖНОГО ПОДВИЖНОГО СОСТАВА | 2007 |
|
RU2340497C2 |
| Устройство для контроля состояния вагонов | 1986 |
|
SU1364521A1 |
Изобретение относится к средствам формирования информационной модели поезда. В способе используют пункт считывания параметров поезда, в состав которого входят контрольные участки (КУ) пути, ограниченные реверсивными датчиками колеса (РД), расположенными на пути следования поезда и подключенными к соответствующим входам блока обработки данных, осуществляющего анализ последовательностей занятия и освобождения контрольных участков колесными парами подвижного состава, по результатам которого определяют принадлежность каждой колесной пары той или иной подвижной единице. Соответственно для каждой подвижной единицы, проследовавшей через пункт считывания параметров поезда, подсчитывают количество принадлежащих ей колесных пар, определяют базу тележек и осевую формулу подвижной единицы, по которым определяют тип каждой подвижной единицы. Используют по меньшей мере три контрольных участка пути, ограниченных реверсивными датчиками колеса: КУ3, длиной 7600 мм, ограниченный четвертым и первым РД, КУ2, длиной 3600 мм, ограниченный третьим и первым РД, и КУ1, длиной 2600 мм, ограниченный вторым и первым РД. При присвоении очередного порядкового номера подвижной единице, считая от головной части поезда, учитывают количество ее колесных пар, а также порядковый номер каждой колесной пары этой подвижной единицы относительно первой колесной пары по счету от головной части поезда. Достигается расширение функциональных возможностей способа формирования информационной модели поезда и повышение надежности его работы. 2 ил., 1 табл.
Способ формирования информационной модели поезда, включающий использование пункта считывания параметров поезда, в составе которого используют несколько контрольных участков (КУ) пути, ограниченных реверсивными датчиками колеса (РД), расположенными на пути следования поезда и подключенными к соответствующим входам блока обработки данных, осуществляющего анализ последовательностей занятия и освобождения контрольных участков колесными парами подвижного состава, по результатам которого определяют принадлежность каждой колесной пары той или иной подвижной единице, соответственно для каждой подвижной единицы, проследовавшей через пункт считывания параметров поезда, подсчитывают количество принадлежащих ей колесных пар, определяют базу колесных тележек и осевую формулу, по которой определяют тип каждой подвижной единицы – локомотив это или вагон, отличающийся тем, что используют по меньшей мере три контрольных участка пути, ограниченных реверсивными датчиками колеса: КУ3, длиной 7600 мм, ограниченный четвертым и первым РД, КУ2, длиной 3600 мм, ограниченный третьим и первым РД, и КУ1, длиной 2600 мм, ограниченный вторым и первым РД, при присвоении очередного порядкового номера подвижной единице, считая от головной части поезда, учитывают количество ее колесных пар, а также порядковый номер каждой колесной пары этой подвижной единицы относительно первой колесной пары по счету от головной части поезда.
| Колосоуборка | 1923 |
|
SU2009A1 |
| DE 10064598 C1, 18.07.2002 | |||
| DE 102016209259 A1, 30.11.2017 | |||
| Устройство для счета подвижных единиц железнодорожного транспорта | 1984 |
|
SU1284870A1 |

