Предлагаемое изобретение относится к приему сигналов, в частности к технике выделения сигналов из шума и может быть использовано в любой области, где требуется обеспечение максимального отношения сигнал/шум.
Известен способ стабилизации средней частоты шумовых выбросов над пороговым уровнем [1-2], заключающийся в определении частоты шумовых срабатываний на выходе порогового устройства и автоматической корректировки порога для поддержания заданной частоты срабатываний.
Наиболее близким по технической сущности к предлагаемому способу является способ автоматической стабилизации частоты f пересечения порогового уровня выбросами шумового процесса [3] путем регулирования порогового уровня в зависимости от частоты его превышений шумом. Согласно данному способу частоту f определяют путем накопления выходных импульсов в течение времени Т, а порог U в установившемся режиме определяется выражением U=U0+Uf=U0+ΔUTf0exp(-U2/2σ2), где U0 - начальное значение порога; f0 - частота пересечения шумом нулевого порога; σ - среднеквадратическое значение шума; ΔU - единичное приращение порога по контуру обратной связи при его пересечении шумом.
Недостатком указанного способа является медленный выход на рабочий режим ввиду того, что в процессе установления рабочего порога частота шумовых срабатываний уменьшается, и крутизна переходного процесса, пропорциональная текущей частоте, снижается. Согласно [3] время Tr выхода на рабочий режим при таком способе составляет 1-6 с в зависимости от требований, предъявляемых к точности стабилизации.
Задачей изобретения является уменьшение времени выхода на рабочий режим.
Указанная задача решается за счет того, что в известном способе автоматической стабилизации частоты f пересечения порогового уровня выбросами шумового процесса путем регулирования порогового уровня в зависимости от частоты его превышений шумовым процессом, предварительно определяют частоту f0 превышения шумовым процессом нулевого порогового уровня и максимальное среднеквадратическое значение σmax шумового процесса, устанавливают начальный пороговый уровень U1<mσmax, где m<(U1/σ) - предварительная оценка требуемого отношения порог/шум в режиме стабилизации, которому соответствует частота f1 превышения шумовым процессом уровня U1 и уменьшают частоту f до стабильного значения f0>f2>fp, где fp - требуемое значение частоты f в рабочем режиме, путем увеличения порога на величину ΔU после каждого превышения его шумом до тех пор, пока порог не выйдет на стабильный уровень U2, после чего производят подсчет количества N2 превышений порога шумовыми выбросами в течение времени усреднения Т2, по окончании этого времени в момент t3 регистрируют величину N2, определяют частоту шумовых выбросов f2=N2/T2 и устанавливают рабочий пороговый уровень  величину Т2 устанавливают из условия N2>1/δ2N, где δN - предельное относительное отклонение количества шумовых превышений порогового уровня от их среднего значения, величину f2 устанавливают в пределах 0,01<f2/f0<0,9, a ΔU выбирают из условия
величину Т2 устанавливают из условия N2>1/δ2N, где δN - предельное относительное отклонение количества шумовых превышений порогового уровня от их среднего значения, величину f2 устанавливают в пределах 0,01<f2/f0<0,9, a ΔU выбирают из условия 
 где индексы означают предварительную оценку максимальных и минимальных значений величин U3, U1 и N1.
где индексы означают предварительную оценку максимальных и минимальных значений величин U3, U1 и N1.
Техническим результатом изобретения является минимальное время выхода на рабочий режим порогового обнаружителя сигналов при обеспечении максимальной вероятности обнаружения сигнала.
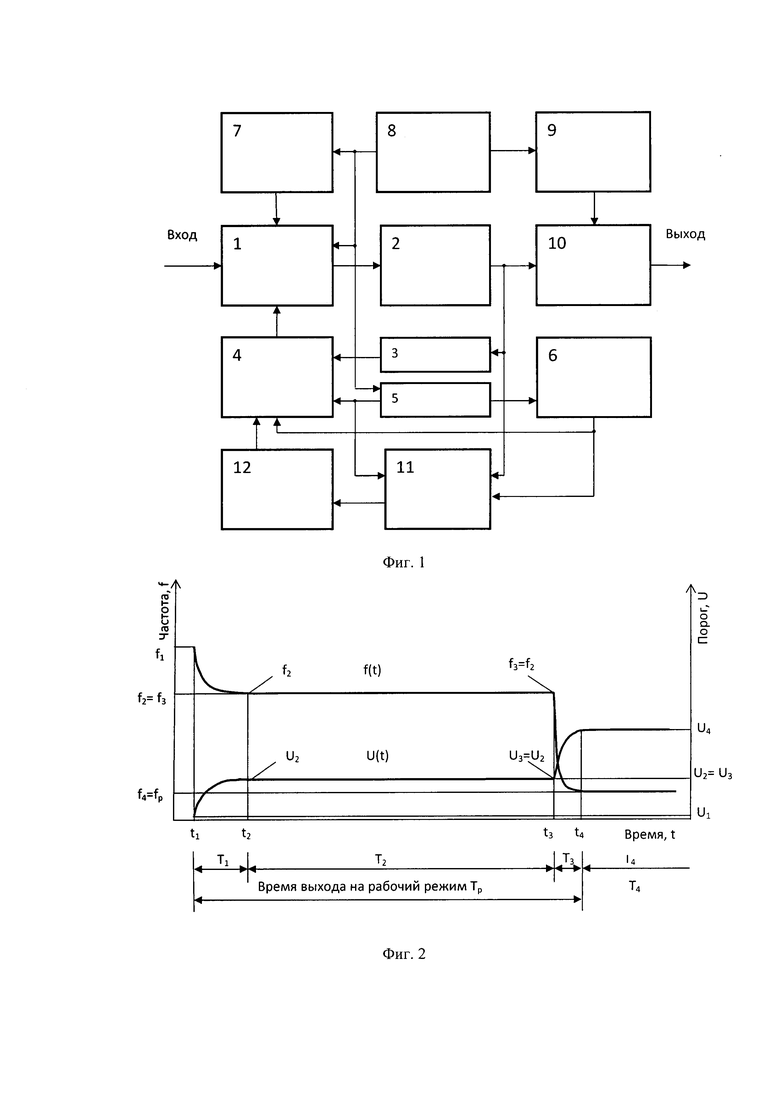
На фиг. 1 представлена схема устройства, реализующего способ. На фиг. 2 показана циклограмма способа.
Согласно фиг. 1 пороговый обнаружитель содержит схему сравнения 1, на вход которой подается смесь сигнала с шумом, а на выходе включен импульсный формирователь 2, генерирующий импульсы стандартной амплитуды и длительности при превышении порога схемы сравнения смесью сигнала с шумом. Между выходом импульсного формирователя 2 и управляющим входом схемы сравнения 1 включены схема обратной связи 3 и схема повышения порога 4, замыкающие контур шумовой автоматической регулировки. Схема повышения порога 4 связана с таймером стабилизации 5, на выходе которого включен таймер переключения режима 6. Таймер стабилизации 5, таймер выхода на режим 6 и схема сброса порога 7 связаны со схемой включения 8. На выходе импульсного формирователя 2 установлен связанный с таймером выхода на режим 6 ключ 10, выход которого является выходом устройства. На выходе импульсного формирователя 2 установлен счетчик усреднения 11, управляемый с выхода таймера стабилизации 5 и таймера переключения режима 6. На выходе счетчика 11 включен вычислитель рабочего порога 12, связанный с управляющим входом схемы повышения порога 4 и выходом таймера переключения режима 6.
На фиг. 2 показана последовательность операций способа. T1 - время стабилизации; Т2 - время усреднения; Т3 - время переключения в рабочий режим; Т4 - время работы; Тр - время выхода на рабочий режим.
Способ осуществляется следующим образом.
В момент времени t1 включают схему сброса порога 9, устанавливающую первоначальный уровень порога U1 и запускающую таймер стабилизации 5 и таймер переключения режима 6. Одновременно закрывается ключ 10. В течение интервала времени T1, задаваемого таймером стабилизации 5, после каждого срабатывания импульсного формирователя 2 схема обратной связи 3 формирует добавку ΔU, на которую увеличивают порог схемы сравнения 2, в результате чего частота шумовых срабатываний понижается, и по истечении времени T1, задаваемого таймером стабилизации 5, процесс шумовой регулировки порога выходит на стационарный режим порога срабатывания U2=Const. В этот момент времени t2 включают таймер переключения режима 6 и счетчик N2 11, с помощью которого подсчитывают количество шумовых срабатываний N2 в течение времени усреднения Т2, задаваемого таймером переключения режима 6. По окончании периода Т2 по команде с таймера переключения режима 6 останавливают счетчик 11 и передают с него число N2 на вычислитель рабочего порога 12, с помощью которого определяют среднюю частоту f2=N2/T2 шумовых превышений порога U2 и величину рабочего порога  где f0 - частота превышения шумовым процессом нулевого порогового уровня; fp - частота шумовых превышений рабочего порога U4. По истечении времени Тр=T1+Т2+Т3, задаваемого таймером выхода на режим, где Т3 - время переключения порога, открывают ключ 10 и регистрируют на его выходе срабатывания от поступающих на вход сигналов.
где f0 - частота превышения шумовым процессом нулевого порогового уровня; fp - частота шумовых превышений рабочего порога U4. По истечении времени Тр=T1+Т2+Т3, задаваемого таймером выхода на режим, где Т3 - время переключения порога, открывают ключ 10 и регистрируют на его выходе срабатывания от поступающих на вход сигналов.
Период T1 должен обеспечивать выход на стабильный режим частоты f2. Частоту f2 выбирают из условия, чтобы выполнялись два противоположных требования. С одной стороны, частота f2 должна быть как можно ближе к f0, чтобы минимизировать время выхода T1 на режим стабилизации. С другой стороны, разница между f2 и f0 должна быть значимой, чтобы обеспечить необходимую точность вычисления рабочего порога. Для широкого диапазона условий отношение f2/f0 должно быть в пределах 0,01<f2/f0<0,9.
Частота f пересечения порога U нормальным процессом с дисперсией σ2 и коэффициентом корреляции R(τ) определяется выражением [3]

где  - частота пересечения нулевого порога.
- частота пересечения нулевого порога.
Из (1) и фиг. 2 следует



И, соответственно,

где U4 и fp - рабочие значения порога и частоты шумовых срабатываний после момента t4 выхода на рабочий режим.
Период стабилизации T1 определяется по известной методике [3], причем T1 и время выхода на режим Тпр, обеспечиваемое прототипом, связаны очевидным соотношением

Пример 1. f0=107 Гц; f2=0,8f0=8⋅106 Гц; f4=100 Гц; Тпр=1 с (низкая точность стабилизации). T1=1,25⋅10-4 с.
Время усреднения Т2 определяется вероятностным разбросом количества срабатываний N2. При распределении случайной величины со средним значением N по закону Пуассона (имеющему место в данном случае) ее дисперсия [4, с. 574] DN=N, а среднеквадратическое отклонение 
Относительное среднеквадратическое отклонение количества шумовых срабатываний  откуда требуемое минимальное количество N2 составляет
откуда требуемое минимальное количество N2 составляет

Пример 2. δN=0,02. N2=2500.
Среднюю частоту шумовых превышений порога U2 определяют по формуле

Откуда 
Пример 3. f2=8⋅106 Гц; N2=2500. Т2~3⋅10-4 с.
Если принять время переключения порога Т3<<Т1, то время выхода на рабочий режим при полученных выше результатах
Тр~Т1+Т2~4⋅10-4 с.
Прототип [3] обеспечивает выход на режим за 1-6 с. Таким образом, выигрыш предлагаемого способа по быстродействию составляет 2500-15000 раз.
Данный способ позволяет:
- Существенно сократить время выхода порогового обнаружителя на рабочий режим до 0,5 мс и менее.
- Обеспечить работу в частотном режиме, что существенно для ряда приложений, например, в частотных дальномерах, при обновлении информации с частотой до 1000 Гц.
- Обеспечить работу при нестационарном шуме.
- обеспечить максимальное значение отношения порог шум с высокой точностью.
Эти выводы подтверждены компьютерным моделированием и испытаниями макетных образцов. Тем самым, подтверждено решение поставленной задачи - существенное уменьшение времени выхода на рабочий режим.
Источники информации
1. US pat. №3516751. Optical radiation pulse control receiver. 1970.
2. Бурд A.M., Лейченко Ю.А., Мотенко Б.Н., Попов A.C. Температурная стабилизация фотоприемника с ЛФД // Приборы и техника эксперимента. - 1975. - №4, - С. 176-178.
3. Вильнер В.Г. Проектирование пороговых устройств с шумовой стабилизацией порога. // Оптико-механическая промышленность. - 1984 г. - №5, - С. 39-41. - прототип.
4. Г. Корн, Т. Корн. Справочник по математике (для научных работников и инженеров). - «Наука», М., 1973 г. - 832 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ приема импульсных сигналов | 2019 |
|
RU2732005C1 |
| Способ приема сигналов | 2020 |
|
RU2750443C1 |
| Способ обнаружения оптических сигналов с помощью лавинного фотодиода | 2023 |
|
RU2815330C1 |
| Пороговое устройство с шумовой стабилизацией порога | 2019 |
|
RU2721174C1 |
| Импульсное пороговое устройство с шумовой стабилизацией порога | 2019 |
|
RU2732004C1 |
| Способ порогового обнаружения оптических сигналов | 2021 |
|
RU2778629C1 |
| Способ определения дисперсии шума | 2023 |
|
RU2797829C1 |
| Пороговое устройство с автоматической шумовой стабилизацией порога | 2019 |
|
RU2732003C1 |
| Способ шумовой автоматической регулировки порога | 2023 |
|
RU2794928C1 |
| Способ порогового обнаружения оптических сигналов | 2023 |
|
RU2797660C1 |
Изобретение относится к приему сигналов, в частности к технике выделения сигналов из шума. Технический результат изобретения заключается в сокращении времени выхода на рабочий режим порогового обнаружителя сигналов при обеспечении максимальной вероятности обнаружения сигнала. Согласно заявленному способ автоматической стабилизации частоты f пересечения порогового уровня выбросами шумового процесса путем регулирования порогового уровня в зависимости от частоты его превышений шумовым процессом, предварительно определяют частоту f0 превышения шумовым процессом нулевого порогового уровня и максимальное среднеквадратическое значение σmax шумового процесса, устанавливают начальный пороговый уровень U1<mσmax, где m<(U1/σ) - предварительная оценка требуемого отношения порог/шум в режиме стабилизации, которому соответствует частота f1 превышения шумовым процессом уровня U1 и уменьшают частоту f до стабильного значения f0>f2>fp, где fp - требуемое значение частоты f в рабочем режиме, путем увеличения порога на величину ΔU после каждого превышения его шумом до тех пор, пока порог не выйдет на стабильный уровень U2, после чего производят подсчет количества N2 превышений порога шумовыми выбросами в течение времени усреднения Т2, по окончании этого времени в момент t3 регистрируют величину N2, определяют частоту шумовых выбросов f2=N2/T2 и устанавливают рабочий пороговый уровень 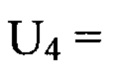
 величину Т2 устанавливают из условия N2>1/δ2N, где δN - предельное относительное отклонение количества шумовых превышений порогового уровня от их среднего значения, величину f2 устанавливают в пределах 0,01<f2/f0<0,9, а ΔU выбирают из условия
величину Т2 устанавливают из условия N2>1/δ2N, где δN - предельное относительное отклонение количества шумовых превышений порогового уровня от их среднего значения, величину f2 устанавливают в пределах 0,01<f2/f0<0,9, а ΔU выбирают из условия  где индексы означают предварительную оценку максимальных и минимальных значений величин U3, U1 и N1. 2 ил.
где индексы означают предварительную оценку максимальных и минимальных значений величин U3, U1 и N1. 2 ил.
Способ автоматической стабилизации частоты f пересечения порогового уровня выбросами шумового процесса путем регулирования порогового уровня в зависимости от частоты его превышений шумовым процессом, отличающийся тем, что предварительно определяют частоту f0 превышения шумовым процессом нулевого порогового уровня и максимальное среднеквадратическое значение σmax шумового процесса, устанавливают начальный пороговый уровень U1<mσmax, где m<(U1/σ) - предварительная оценка требуемого отношения порог/шум в режиме стабилизации, которому соответствует частота f1 превышения шумовым процессом уровня U1 и уменьшают частоту f до стабильного значения f0>f2>fp, где fp - требуемое значение частоты f в рабочем режиме, путем увеличения порога на величину ΔU после каждого превышения его шумом до тех пор, пока порог не выйдет на стабильный уровень U2, после чего производят подсчет количества N2 превышений порога шумовыми выбросами в течение времени усреднения Т2, по окончании этого времени в момент t3 регистрируют величину N2, определяют частоту шумовых выбросов f2=N2/T2 и устанавливают рабочий пороговый уровень 
 величину Т2 устанавливают из условия N2>1/δ2N, где δN - предельное относительное отклонение количества шумовых превышений порогового уровня от их среднего значения, величину f2 устанавливают в пределах 0,01<f2/f0<0,9, а ΔU выбирают из условия
величину Т2 устанавливают из условия N2>1/δ2N, где δN - предельное относительное отклонение количества шумовых превышений порогового уровня от их среднего значения, величину f2 устанавливают в пределах 0,01<f2/f0<0,9, а ΔU выбирают из условия  где индексы означают предварительную оценку максимальных и минимальных значений величин U3, U1 и N1.
где индексы означают предварительную оценку максимальных и минимальных значений величин U3, U1 и N1.
| ВИЛЬНЕР В.Г | |||
| Проектирование пороговых устройств с шумовой стабилизацией порога, ж | |||
| ОМП, 1984, N5, 39-41 | |||
| УСТРОЙСТВО СТАБИЛИЗАЦИИ СРЕДНЕЙ ЧАСТОТЫ ШУМОВЫХ ВЫБРОСОВ НАД ПОРОГОВЫМ УРОВНЕМ | 0 |
|
SU320067A1 |
| Устройство стабилизации средней частоты шумовых выбросов над пороговым уровнем | 1983 |
|
SU1133672A1 |
| US 4051473, 27.09.1977. | |||

