Предлагаемое изобретение относится к приему сигналов, в частности, к технике выделения сигналов из шума и может быть использовано в любой области, где требуется обеспечение максимального отношения сигнал/шум.
Известен способ стабилизации средней частоты шумовых выбросов над пороговым уровнем [1-2], заключающийся в определении частоты шумовых срабатываний на выходе порогового устройства и автоматической корректировки порога для поддержания заданной частоты срабатываний.
Наиболее близким по технической сущности к предлагаемому способу является способ приема импульсных сигналов [3] путем регулирования порогового уровня в зависимости от частоты его превышений шумом. Согласно данному способу частоту f определяют путем накопления выходных импульсов в течение времени Т, а порог U в установившемся режиме определяется выражением U=U0+Uf=U0+ΔUTf0exp(-U2/2σ2), где U0 - начальное значение порога; f0 - частота пересечения шумом нулевого порога; σ - среднеквадратическое значение шума; ΔU - единичное приращение порога по контуру обратной связи при пересечении порога шумом.
Недостатком указанного способа является медленный выход на рабочий режим ввиду того, что в процессе установления рабочего порога частота шумовых срабатываний уменьшается, и скорость переходного процесса, пропорциональная текущей частоте, снижается. Согласно [3] время Tr выхода на рабочий режим при таком способе составляет 1-6 с в зависимости от требований, предъявляемых к точности стабилизации частоты шумовых срабатываний.
Задачей изобретения является уменьшение времени выхода на рабочий режим.
Указанная задача решается за счет того, что в известном способе приема импульсных сигналов путем регулирования порогового уровня в зависимости от частоты его превышений шумом, предварительно определяют частоту f0 срабатываний порогового устройства от воздействия шума при нулевом значении порога, устанавливают порог на уровне 0<U1<U2, затем увеличивают порог до уровня U1<U2<U3, одновременно определяя частоту f шумовых срабатываний, и при частоте f=f2=kf0, где k - предварительно заданный коэффициент из диапазона k=0,01…0,9, увеличивают порог в m раз до рабочего уровня U3=mU2 после чего фиксируют этот порог и начинают принимать сигналы, причем,  , где f3 - допустимая частота ложных срабатываний в режиме приема сигналов.
, где f3 - допустимая частота ложных срабатываний в режиме приема сигналов.
Эквивалентный порог U3 можно вводить путем введения ослабления с коэффициентом m перед пороговой обработкой сигнала.
Техническим результатом изобретения является минимальное время выхода на рабочий режим порогового обнаружителя сигналов при обеспечении максимальной вероятности обнаружения сигнала.
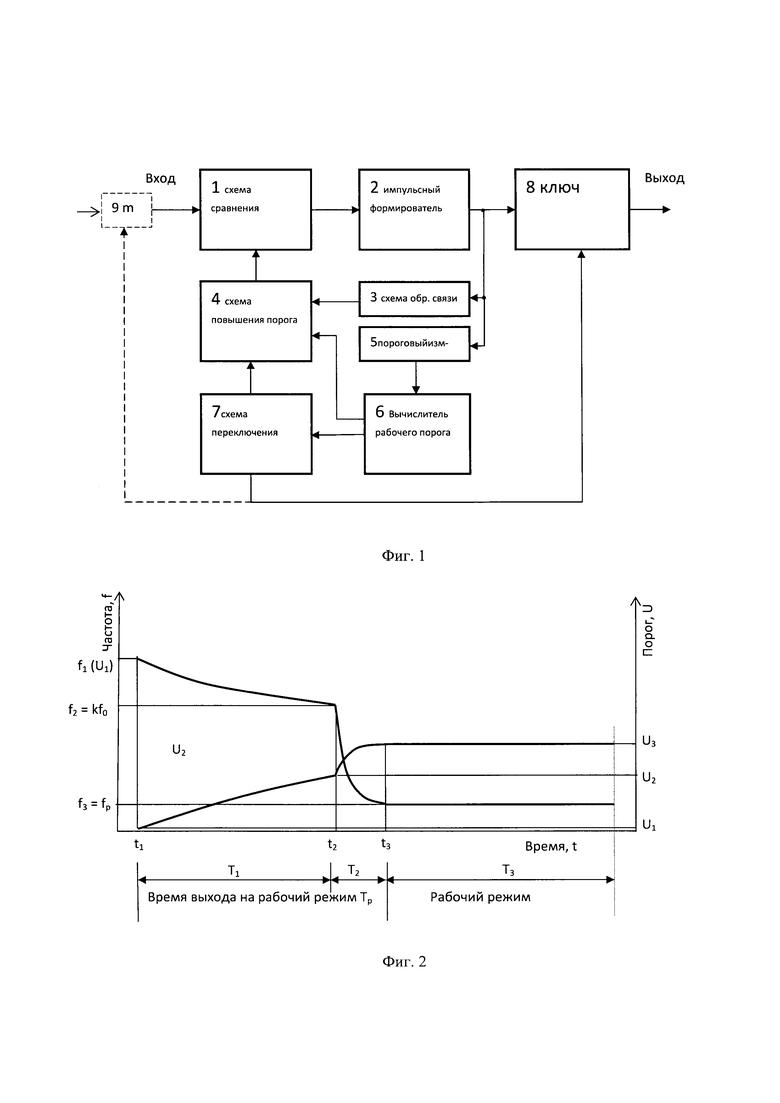
На фиг. 1 представлена схема устройства, реализующего способ. На фиг. 2 показана циклограмма способа.
Согласно фиг. 1 пороговый обнаружитель содержит схему сравнения 1, на вход которой подается смесь сигнала с шумом, а на выходе включен импульсный формирователь 2, генерирующий импульсы стандартной амплитуды и длительности при превышении порога схемы сравнения смесью сигнала с шумом. Между выходом импульсного формирователя 2 и управляющим входом схемы сравнения 1 включены схема обратной связи 3 и схема повышения порога 4, замыкающие контур шумовой автоматической регулировки. Схема повышения порога 4 управляется последовательно связанными пороговым измерителем частоты 5, подключенным к выходу импульсного формирователя, и вычислителем рабочего порога 6. Последний выдает результат вычислений порога на схему повышения порога 4 и синхросигнал для переключения - на схему переключения 7, управляющую моментом повышения порога. На выходе импульсного формирователя установлен ключ 8, открывающий выход схемы при поступлении синхросигнала от схемы переключения 7. Если величина коэффициента m фиксирована, то эквивалентное повышение порога может осуществляться включением аттенюатора 9, установленного на входе схемы сравнения.
На фиг. 2 показана последовательность операций способа. T1 - время стабилизации; Т2 - время переключения порога; Т3 - время работы (рабочий режим).
Способ осуществляется следующим образом (фиг. 2).
В момент времени t1 устанавливают первоначальный уровень порога U1 и запирают ключ 8, блокируя появление на выходе срабатывания от превышения порога шумом. В течение времени T1=t2-t1 осуществляют стабилизацию порога посредством его корректировки на величину ΔU при каждом шумовом превышении порога схемы сравнения 1 и соответствующем срабатывании импульсного формирователя 2. Формирование добавки ΔU производят с помощью схемы обратной связи 3, связанной со схемой повышения порога 4, то есть с помощью шумовой автоматической регулировки ШАРП [3]. В момент времени t2, останавливают процесс стабилизации и повышают порог до уровня U3=mU2, где  По окончании переходного процесса переключения в момент времени t3 фиксируют порог на уровне U3, открывают ключ 8 и, тем самым, переходят в рабочий режим приема сигналов.
По окончании переходного процесса переключения в момент времени t3 фиксируют порог на уровне U3, открывают ключ 8 и, тем самым, переходят в рабочий режим приема сигналов.
Период Т1 должен обеспечивать выход на стабильный режим частоты f2. Частоту f2 выбирают из условия, чтобы выполнялись два противоположных требования. С одной стороны, частота f2 должна быть как можно ближе к f0, чтобы минимизировать время выхода T1 на режим стабилизации. С другой стороны, разница между f2 и f0 должна быть значимой, чтобы обеспечить необходимую точность вычисления и установки рабочего порога. Для существующих исходных данных отношение f2/f0 должно находиться в пределах 0,01<f2/f0<0,9.
Частота f пересечения порога U нормальным процессом с дисперсией σ2 и коэффициентом корреляции R(τ) определяется выражением [3]

где  - частота пересечения нулевого порога.
- частота пересечения нулевого порога.
Из (1) и фиг. 2 следует

И, соответственно,

где U3 и f3 - рабочие значения порога и частоты шумовых срабатываний после момента t3 выхода на рабочий режим.
Период стабилизации T1 определяется по известной методике [3], причем T1 и время выхода на режим Тпр, обеспечиваемое прототипом, связаны очевидным соотношением

Пример 1. f0=107 Гц; f2=0,8 f0=8⋅106 Гц; f3=100 Гц; Тпр=1 с (низкая точность стабилизации). Предлагаемый способ при этих исходных данных обеспечивает период стабилизации T1=1,25⋅10-4 с.
Время переключения Т2 определяется быстродействием применяемой электроники и может не учитываться.
Прототип обеспечивает выход на режим за Тпр=1-6 с [3]. Таким образом, максимальный выигрыш предлагаемого способа по быстродействию составляет Тпр/Т1=80000 раз.
Данный способ позволяет:
- Существенно сократить время выхода порогового обнаружителя на рабочий режим до 1 мс и менее.
- Обеспечить работу в частотном режиме, что существенно для ряда приложений, например, в частотных дальномерах, при обновлении информации с частотой до 1000 Гц.
- Обеспечить работу при нестационарном шуме.
- Обеспечить максимальное значение отношения порог шум с высокой точностью.
Эти выводы подтверждены компьютерным моделированием и испытаниями макетных образцов. Тем самым, подтверждено решение поставленной задачи - существенное уменьшение времени выхода на рабочий режим.
Источники информации
1. US pat. №3516751. Optical radiation pulse control receiver. 1970.
2. Бурд A.M., Лейченко Ю.А., Мотенко Б.Н., Попов A.C. Температурная стабилизация фотоприемника с ЛФД // Приборы и техника эксперимента. - 1975. - №4, - С. 176-178.
3. Вильнер В.Г. Проектирование пороговых устройств с шумовой стабилизацией порога. // Оптико-механическая промышленность. - 1984 г. - №5, - С. 39-41. - прототип.
4. Г. Корн, Т. Корн. Справочник по математике (для научных работников и инженеров). - «Наука», М., 1973 г. - 832 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ автоматической стабилизации частоты пересечения порогового уровня выбросами шумового процесса | 2019 |
|
RU2718856C1 |
| Способ приема сигналов | 2020 |
|
RU2750443C1 |
| Способ обнаружения оптических сигналов с помощью лавинного фотодиода | 2023 |
|
RU2815330C1 |
| Способ определения дисперсии шума | 2023 |
|
RU2797829C1 |
| Импульсное пороговое устройство с шумовой стабилизацией порога | 2019 |
|
RU2732004C1 |
| Способ импульсного локационного измерения дальности | 2022 |
|
RU2792086C1 |
| Пороговое устройство с шумовой стабилизацией порога | 2019 |
|
RU2721174C1 |
| Способ порогового обнаружения оптических сигналов | 2021 |
|
RU2778629C1 |
| Пороговое устройство с автоматической шумовой стабилизацией порога | 2019 |
|
RU2732003C1 |
| Способ приема импульсных оптических сигналов | 2021 |
|
RU2778048C1 |
Изобретение относится к приему сигналов, в частности к технике выделения сигналов из шума, и может быть использовано в любой области, где требуется обеспечение максимального отношения сигнал/шум. Технический результат состоит в существенном сокращении времени выхода на режим. Для этого в способе приема импульсных сигналов путем регулирования порогового уровня в зависимости от частоты его превышений шумом предварительно определяют частоту f0 срабатываний порогового устройства от воздействия шума при нулевом значении порога, устанавливают порог на уровне 0<U1<U2, затем увеличивают порог до уровня U2, одновременно определяя частоту f шумовых срабатываний, и при частоте f=f2=kf0, где k - предварительно заданный коэффициент из диапазона k=0,01…0,9, увеличивают порог в m раз до уровня U3=mU2 и принимают импульсные сигналы. 1 з.п. ф-лы, 2 ил.
1. Способ приема импульсных сигналов путем регулирования порогового уровня в зависимости от частоты его превышений шумом, отличающийся тем, что предварительно определяют частоту f0 срабатываний порогового устройства от воздействия шума при нулевом значении порога, устанавливают порог на уровне 0<U1<U2, затем увеличивают порог до уровня U1<U2<U3, одновременно определяя частоту f шумовых срабатываний, и при частоте f=f2=kf0, где k - предварительно заданный коэффициент из диапазона k=0,01…0,9, увеличивают порог в m раз до рабочего уровня U3=mU2, после чего фиксируют этот порог и начинают принимать сигналы, причем  , где f3 - допустимая частота ложных срабатываний в режиме приема сигналов.
, где f3 - допустимая частота ложных срабатываний в режиме приема сигналов.
2. Способ по п. 1, отличающийся тем, что эквивалентный порог U3 вводят путем введения ослабления с коэффициентом m перед пороговой обработкой сигнала.
| УСТРОЙСТВО СТАБИЛИЗАЦИИ СРЕДНЕЙ ЧАСТОТЫ ШУМОВЫХ ВЫБРОСОВ НАД ПОРОГОВЫМ УРОВНЕМ | 0 |
|
SU320067A1 |
| Устройство стабилизации средней частоты шумовых выбросов над пороговым уровнем | 1983 |
|
SU1133672A1 |
| US 3516751 A, 23.06.1970 | |||
| US 4051473 A, 27.09.1977 | |||
| ВИЛЬНЕР В.Г | |||
| Проектирование пороговых устройств с шумовой стабилизацией порога, ж.ОМП,1984. | |||

