Область техники, к которой относится изобретение
[1] Настоящее раскрытие относится к сообщению о событии и воссозданию события на основе краудсорсинга для автомобилей с использованием транспортных средств с подключением к Интернету и транспортной инфраструктуры с подключением к Интернету.
Уровень техники
[2] Транспортные средства представляют собой среды с множеством датчиков с подключением к облачному сервису, совместно использующие коммуникации между транспортными средствами (V2V) и коммуникации транспортных средств с инфраструктурой транспортной системы (V2I).
Сущность изобретения
[3] Способ включает в себя этап, на котором принимают с помощью краудсорсингового сервера данные датчиков от транспортных средств в непосредственной близости от местоположения события во время события в ответ на уведомление транспортных средств о возникновении события. Данные датчиков включают в себя данные датчиков транспортных средств, воспринимаемые во время события.
[4] Данные датчиков могут включать в себя данные датчиков транспортных средств, воспринимаемые до, во время и после события.
[5] Способ может дополнительно включать в себя этапы, на которых принимают с помощью краудсорсингового сервера уведомление о возникновении события и связывают с помощью краудсорсингового сервера данные датчиков с событием.
[6] Способ может дополнительно включать в себя этап, на котором воссоздают событие с использованием данных датчиков, связанных с событием.
[7] Способ может дополнительно включать в себя этап, на котором уведомляют с помощью краудсорсингового сервера получателя о воссозданной версии события. Получателем может являться по меньшей мере одно из транспортных средств.
[8] Способ может дополнительно включать в себя этап, на котором принимают с помощью краудсорсингового сервера данные датчиков от инфраструктуры транспортной системы в непосредственной близости от местоположения события. Данные датчиков инфраструктуры транспортной системы включают в себя данные датчиков инфраструктуры транспортной системы, воспринимаемые во время события.
[9] В событии могут участвовать или могут не участвовать какие-либо из транспортных средств. Событие может представлять собой столкновение с участием по меньшей мере одного из транспортных средств.
[10] Способ может дополнительно включать в себя этапы, на которых уведомляют краудсорсинговый сервер о возникновении события, и при уведомлении краудсорсингового сервера о возникновении события инициируют с помощью краудсорсингового сервера обеспечение транспортными средствами данных датчиков краудсорсинговому серверу.
[11] Система включает в себя краудсорсинговый сервер, выполненный с возможностью приема данных датчиков от транспортных средств в непосредственной близости от местоположения события во время события в ответ на уведомление транспортных средств о возникновении события. Данные датчиков включают в себя данные датчиков транспортных средств, воспринимаемые во время события.
[12] Другой способ включает в себя этапы, на которых обнаруживают с помощью первого транспортного средства возникновение события и уведомляют с помощью первого транспортного средства краудсорсинговый сервер и другие транспортные средства в непосредственной близости от события во время события о возникновении события. Этот способ дополнительно включает в себя этап, на котором передают от других транспортных средств данные датчиков других транспортных средств, воспринимаемые во время события, краудсорсинговому серверу.
[13] Этот способ может дополнительно включать в себя этап, на котором передают с помощью первого транспортного средства данные датчиков первого транспортного средства, воспринимаемые во время события, краудсорсинговому серверу.
[14] Данные датчиков одного заданного из транспортных средств включают в себя данные датчиков, указывающие на по меньшей мере одно из внешней среды одного заданного из транспортных средств, рабочее состояние одного заданного из транспортных средств и местоположение одного заданного из транспортных средств.
[15] Этот способ может дополнительно включать в себя этапы, на которых уведомляют с помощью первого транспортного средства блоки инфраструктуры транспортной системы в непосредственной близости от события о возникновении события и передают от блоков инфраструктуры транспортной системы данные датчиков блоков инфраструктуры транспортной системы, воспринимаемые во время события, краудсорсинговому серверу. Данные датчиков блоков инфраструктуры транспортной системы включают в себя данные датчиков, указывающие на внешние среды блоков инфраструктуры транспортной системы.
[16] Этот способ может дополнительно включать в себя этапы, на которых связывают с помощью краудсорсингового сервера данные датчиков с событием и воссоздают событие с использованием данных датчиков, связанных с событием.
[17] В событии могут участвовать или могут не участвовать какие-либо из транспортных средств. Событие может представлять собой столкновение с участием одного из (i) первого транспортного средства и ни одного из других транспортных средств и (ii) первого транспортного средства и по меньшей мере одного из других транспортных средств.
Краткое описание чертежей
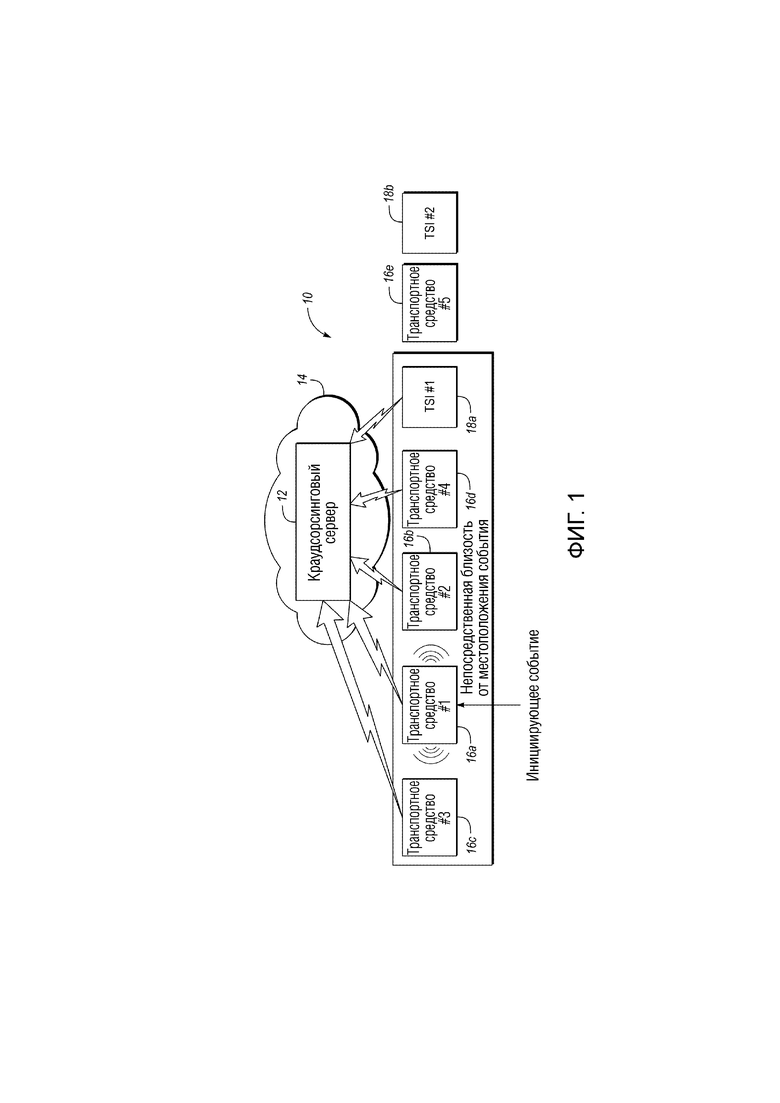
[18] Фигура 1 иллюстрирует блок-схему автомобильной системы сообщения о событии и воссоздания события на основе краудсорсинга;
[19] Фигура 2 иллюстрирует блок-схему, изображающую работу автомобильной системы сообщения о событии и воссоздания события на основе краудсорсинга; и
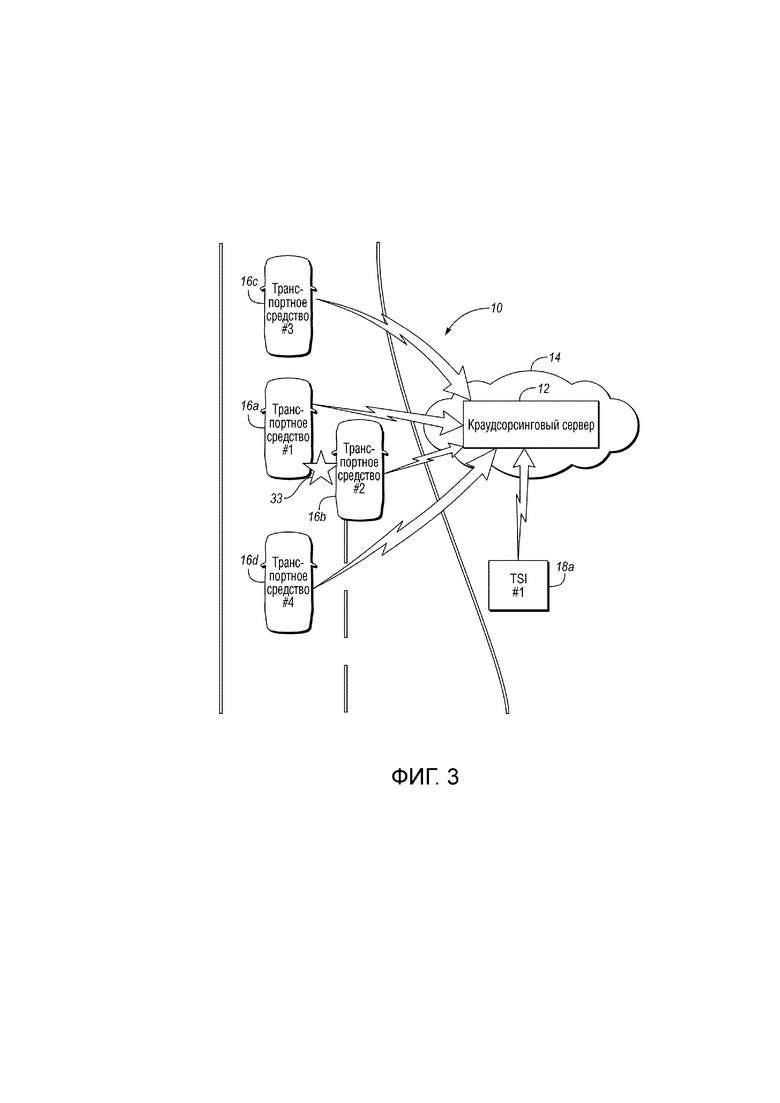
[20] Фигура 3 иллюстрирует схему автомобильной системы сообщения о событии и воссоздания события на основе краудсорсинга, использующую транспортные средства, участвовавшие в столкновении, находящиеся поблизости транспортные средства и находящуюся поблизости инфраструктуру транспортной системы.
Подробное описание
[21] Здесь раскрыты подробные варианты выполнения настоящего изобретения; однако следует понимать, что раскрытые варианты выполнения представляют собой всего лишь примерные варианты выполнения настоящего изобретения, которое может быть выполнено в различных и альтернативных формах. Фигуры необязательно выполнены в масштабе; некоторые признаки могут быть преувеличены или минимизированы для показа деталей особых компонентов. В связи с этим конкретные конструктивные и функциональные детали, раскрытые здесь, не следует интерпретировать как ограничивающие, но всего лишь как характерную основу для обучения специалиста в области техники для различного применения настоящего изобретения.
[22] Теперь со ссылкой на Фигуру 1 показана блок-схема автомобильной системы 10 сообщения о событии и воссоздания события на основе краудсорсинга. После столкновения транспортных средств часто затруднительно определять, кто был виноват. Система 10 использует существующие автомобильные технологии и технологии инфраструктур с подключением к Интернету для образования системы, которая может обеспечивать краудсорсинговые данные для определения вины и для обеспечения аварийно-спасательных служб релевантной информацией своевременно и точно.
[23] Система 10 включает в себя краудсорсинговый сервер 12, расположенный в облачном сервисе 14. Краудсорсинговый сервер 12 выполнен с возможностью приема беспроводных сообщений от транспортных средств, таких как транспортные средства 16a, 16b, 16c, 16d и 16e, и от блоков инфраструктуры транспортной системы (TSI), таких как блоки 18a и 18b TSI. Транспортные средства 16 включают в себя датчики, которые могут воспринимать внешнюю среду транспортных средств и рабочие условия транспортных средств. Датчики транспортных средств, которые могут воспринимать внешнюю среду транспортных средств, включают в себя видеокамеры, дальномерные/радарные/ультразвуковые датчики, микрофоны, GPS-приемник и т.д. Датчики транспортных средств, которые могут воспринимать рабочие условия транспортных средств, включают в себя бортовые датчики, которые собирают рабочие данные транспортных средств, например, от локальной сети контроллеров (CAN)транспортных средств, включающие в себя данные о рулевом управлении, данные о положении дросселя, данные об ускорении ходовой части и т.д. Транспортные средства 16 выполнены с возможностью беспроводного сообщения их данных датчиков краудсорсинговому серверу 12.
[24] Блоки 18 TSI расположены смежно с проезжей частью и включают в себя датчики, такие как смонтированные видеокамеры. Блоки 18 TSI выполнены с возможностью беспроводного сообщения их данных датчиков краудсорсинговому серверу 12.
[25] При работе при возникновении инициирующего события транспортные средства 16 в непосредственной близости от события во время события уведомляются о возникновении события. Транспортные средства 16 отвечают путем загрузки их данных датчиков на краудсорсинговый сервер 12. Загружаемые данные датчиков от транспортного средства 16 представляют собой данные датчиков транспортного средства, воспринимаемые во время события, включая непосредственно до, во время и непосредственно после события (например, за пять секунд до и пять секунд после события). Краудсорсинговый сервер 12 связывает загружаемые данные датчиков с событием. Таким образом, происходит сообщение о событии на основе краудсорсинга. Загружаемые данные датчиков, связанные с событием, могут анализироваться для воссоздания события. Таким образом, происходит воссоздание события на основе краудсорсинга.
[26] Альтернативно или дополнительно, блоки 18 TSI в непосредственной близости от события во время события уведомляются о возникновении события. Блоки 18 TSI отвечают путем загрузки их данных датчиков на краудсорсинговый сервер 12. Загружаемые данные датчиков от блока 18 TSI представляют собой данные датчиков блока TSI, воспринимаемые во время события, включая непосредственно до, во время и непосредственно после события. Краудсорсинговый сервер 12 связывает эти загружаемые данные датчиков с событием.
[27] В инициирующем событии могут участвовать или могут не участвовать какие-либо из транспортных средств. Инициирующее событие с участием одного или более транспортных средств 16 может представлять собой столкновение транспортных средств. Как указано, определение ответственности при столкновении транспортных средств с участием множества транспортных средств всегда было затруднительным. Система 10 решает эту проблему, используя различные данные датчиков транспортных средств 16 и/или блоков 18 TSI для определения ответственности. Осуществление сохранения прокрутки данных датчиков транспортных средств 16 и/или блоков 18 TSI и загрузка этих данных датчиков на краудсорсинговый сервер 12 в облачном сервисе 14 при возникновении столкновения транспортных средств позволяет выполнять определение вины. В общем, инициирующие события или ситуации могут воссоздаваться в цифровой форме с использованием данных датчиков и повторно воспроизводиться для установления ответственности.
[28] Со ссылкой на Фигуру 1 будет более подробно описана работа системы 10 для сообщения о событии и воссоздания события на основе краудсорсинга. Описываемая работа будет предполагать, что инициирующее событие представляет собой столкновение с участием первого транспортного средства 16а. Работа начинается с участия первого транспортного средства 16а в столкновении. В столкновении может участвовать только само первое транспортное средство 16а или с какими-либо из других транспортных средств 16 и/или с какими-либо другими транспортными средствами, не показанными на Фигуре 1. Для простоты будет предполагаться, что в столкновении участвует только само первое транспортное средство 16а.
[29] Акт столкновения является инициирующим событием для системы 10. Датчики первого транспортного средства 16а обнаруживают нахождение первого транспортного средства в столкновении. Обнаружение столкновения инициирует загрузку первым транспортным средством 16а его данных датчиков на краудсорсинговый сервер 12. Данные датчиков включают в себя, например, уведомление о том, что первое транспортное средство 16а участвовало в столкновении, и информацию о GPS-местоположении, указывающую на местоположение первого транспортного средства 16а во время столкновения. В связи с этим информация о GPS-местоположении также указывает на местоположение и время столкновения. Данные датчиков включают в себя данные датчиков, воспринимаемые датчиками первого транспортного средства 16а во время столкновения (т.е. непосредственно до, во время и непосредственно после столкновения). Все вместе данные датчиков, загружаемые с первого транспортного средства 16а на краудсорсинговый сервер 12, включают в себя информацию, относящуюся к местоположению и времени столкновения, внешней среде первого транспортного средства во время столкновения и рабочим условиям первого транспортного средства во время столкновения. Разумеется, вместо передачи данных датчиков первого транспортного средства 16а от первого транспортного средства краудсорсинговому серверу 12, происходящей одновременно с обнаружением столкновения, передача может происходить в более позднее время (через часы, дни) после столкновения.
[30] Обнаружение столкновения также инициирует распространение первым транспортным средством 16а флажка оповещения. Флажок оповещения представляет собой оповещение о том, что произошло инициирующее событие. В этом случае, так как инициирующее событие представляет собой столкновение с участием первого транспортного средства 16а, флажок оповещения представляет собой флажок оповещения о столкновении. Например, флажок оповещения о столкновении указывает на местоположение и время столкновения. Краудсорсинговый сервер 12 принимает флажок оповещения о столкновении, распространяемый от первого транспортного средства 16а. Краудсорсинговый сервер 12 может быть дополнительно или альтернативно осведомлен об участии первого транспортного средства 16а в столкновении на основе флажка оповещения о столкновении от первого транспортного средства 16а. В любом случае краудсорсинговый сервер 12 связывает флажок оповещения о столкновении и данные датчиков, загружаемые с первого транспортного средства 16а, с идентификатором, уникально связанным с событием столкновения.
[31] Распространение флажка оповещения о столкновении от первого транспортного средства 16а служит другой цели. Флажок оповещения является инициатором для загрузки транспортными средствами в непосредственной близости от столкновения во время столкновения их данных датчиков, воспринимаемых во время столкновения, на краудсорсинговый сервер 12. Как показано на Фигуре 1, второе, третье и четвертое транспортные средства 16b, 16c и 16d находятся в непосредственной близости от столкновения во время столкновения. Например, второе, третье и четвертое транспортные средства 16b, 16c и 16d находятся в непосредственной близости от столкновения во время столкновения в силу приему флажка оповещения. В качестве другого примера, второе, третье и четвертое транспортные средства 16b, 16c и 16d находятся в непосредственной близости от столкновения во время столкновения на основе сравнения их местоположения с местоположением столкновения. Дополнительно, при приеме флажка оповещения краудсорсинговый сервер 12 может распространять флажок оповещения для приема транспортными средствами 16 в непосредственной близости от столкновения во время столкновения. Транспортные средства 16, принимающие флажок оповещения, могут передавать флажок оповещения другим транспортным средствам с использованием технологии коммуникации между транспортными средствами (V2V).
[32] В любом случае, в ответ на прием флажка оповещения, и находясь в непосредственной близости от столкновения во время столкновения, второе, третье и четвертое транспортные средства 16b, 16c и 16d загружают их соответственные данные датчиков во время столкновения (снова непосредственно до, во время и непосредственно после столкновения) на краудсорсинговый сервер 12. Данные датчиков от второго транспортного средства 16b включают в себя информацию, относящуюся к местоположению второго транспортного средства во время столкновения, внешней среде второго транспортного средства во время столкновения и рабочим условиям второго транспортного средства во время столкновения; данные датчиков от третьего транспортного средства 16c включают в себя информацию, относящуюся к местоположению третьего транспортного средства во время столкновения, внешней среде третьего транспортного средства во время столкновения и рабочим условиям третьего транспортного средства во время столкновения; и т.д. Передача данных датчиков от любого из второго, третьего и четвертого транспортных средств 16b, 16c и 16d краудсорсинговому серверу 12 может происходить одновременно с приемом флажка оповещения (т.е. во время столкновения) или в более позднее время после приема флажка оповещения (т.е. в более позднее время после столкновения).
[33] Краудсорсинговый сервер 12 связывает данные датчиков, загружаемые со второго, третьего и четвертого транспортных средств 16b, 16c и 16d, с идентификатором, уникально связанным с событием столкновения. Все данные датчиков, загружаемые с первого, второго, третьего и четвертого транспортных средств 16a, 16b, 16c и 16d, тем самым связываются вместе с идентификатором, уникально связанным с событием столкновения. Таким образом, происходит сообщение о событии на основе краудсорсинга с использованием множества транспортных средств. Множество транспортных средств, используемых для сообщения о событии на основе краудсорсинга, включают в себя транспортные средства, непосредственно участвовавшие в событии (т.е. первое транспортное средство 16а, участвовавшее в столкновении), и сторонние транспортные средства, которые фактически выступали в качестве свидетелей события (т.е. второе, третье и четвертое транспортные средства 16b, 16c и 16d).
[34] Как показано на Фигуре 1, пятое транспортное средство 16e не находится в непосредственной близости от столкновения во время столкновения. В связи с этим пятое транспортное средство 16e не принимает флажок оповещения или, с другой стороны, пятое транспортное средство принимает флажок оповещения, но считается находящимся слишком далеко от местоположения столкновения во время столкновения. Так как пятое транспортное средство 16e не находится в непосредственной близости от столкновения во время столкновения, пятое транспортное средство не загружает никакие из его данных датчиков о столкновении. Таким образом, данные датчиков, связываемые краудсорсинговым сервером 12 с событием столкновения, не перегружаются нерелевантной информацией.
[35] Флажок оповещения также является инициатором для загрузки блоками TSI в непосредственной близости от столкновения во время столкновения их данных датчиков, воспринимаемых во время столкновения, на краудсорсинговый сервер 12. Как показано на Фигуре 1, первый блок 18а TSI находится в непосредственной близости от столкновения во время столкновения. В связи с этим в ответ на прием флажка оповещения, распространяемого первым транспортным средством 16a, первый блок 18a TSI загружает его соответственные данные датчиков во время столкновения на краудсорсинговый сервер 12. Данные датчиков от первого блока 18a TSI включают в себя информацию, относящуюся к местоположению первого блока TSI и внешней среде первого блока TSI во время столкновения. Передача данных датчиков от первого блока 18a TSI краудсорсинговому серверу 12 может происходить одновременно с приемом флажка оповещения или в более позднее время после столкновения.
[36] Краудсорсинговый сервер 12 связывает данные датчиков, загружаемые с первого блока 18a TSI, с идентификатором, уникально связанным с событием столкновения. Все данные датчиков, загружаемые с первого, второго, третьего и четвертого транспортных средств 16a, 16b, 16c и 16d и первого блока 18a TSI, тем самым связываются вместе с идентификатором, уникально связанным с событием столкновения. Таким образом, происходит сообщение о событии на основе краудсорсинга с использованием транспортных средств и блоков TSI.
[37] Как показано на Фигуре 1, второй блок 18b TSI не находится в непосредственной близости от столкновения. В связи с этим второй блок 18b TSI не загружает никакие из его данных датчиков о столкновении. Таким образом, снова данные датчиков, связываемые краудсорсинговым сервером 12 с событием столкновения, не перегружаются нерелевантной информацией.
[38] Как отмечено, описанная работа предполагает, что в столкновении участвует только само первое транспортное средство 16a. В случае столкновения с участием первого транспортного средства 16a и других транспортных средств работа дополнительно включает в себя загрузку другими транспортными средствами их данных датчиков на краудсорсинговый сервер 12 в ответ на обнаружение столкновения и передачу их собственных флажков оповещения о столкновении.
[39] Распространение флажка оповещения о событии от первого транспортного средства 16a, а также от каких-либо из других транспортных средств, для приема находящимися поблизости транспортными средствами может выполняться с использованием технологии коммуникации между транспортными средствами (V2V). Таким образом, транспортное средство, участвовавшее в событии, таком как столкновение, т.е. первое транспортное средство 16a, может сообщать другим транспортным средствам о том, что произошло столкновение. Как описано, после инициации флажка события другие транспортные средства и блоки TSI с подключением к Интернету вблизи столкновения загружают релевантные данные датчиков на краудсорсинговый сервер 12 в облачном сервисе 14. Для увеличения надежности передачи данных одно транспортное средство может передавать его релевантные данные датчиков другому транспортному средству посредством коммуникаций V2V, которые далее отправляют эти данные датчиков краудсорсинговому серверу 12.
[40] Краудсорсинговый сервер 12 связывает все из загружаемых данных датчиков с событием. Загружаемые данные датчиков могут анализироваться для воссоздания события. Анализ может выполняться третьей стороной или краудсорсинговым сервером 12. В любом случае краудсорсинг информации может приводить к более сложному и точному анализу событий, таких как столкновения, с данными, ранее недоступными. Сообщения очевидцев, послеаварийные опросы полицией и т.п. могут потенциально быть заменены системой 10.
[41] Теперь со ссылкой на Фигуру 2 с непрерывной ссылкой на Фигуру 1 показана блок-схема 20, изображающая работу системы 10. Работа начинается при возникновении инициирующего события, как показано в блоке 22. Краудсорсинговый сервер 12 осведомляют о местоположении и времени инициирующего события, как указано в блоке 24. Транспортные средства 16 и блоки 18 TSI в непосредственной близости от события во время события немедленно осведомляют о событии, как указано в блоке 26. Эти транспортные средства 16 и блоки 18 TSI отвечают путем загрузки их данных датчиков, воспринимаемых во время события, на краудсорсинговый сервер 12, как указано в блоке 28. Краудсорсинговый сервер 12 связывает все загружаемые данные датчиков с уникальным идентификатором инициирующего события, как указано в блоке 30. Загружаемые данные датчиков анализируют с помощью третьей стороны или с помощью краудсорсингового сервера 12 для воссоздания инициирующего события, как указано в блоке 32. Этот анализ воссоздания инициирующего события может включать в себя этапы, на которых определяют причину инициирующего события, ответственность сторон, участвовавших в инициирующем событии, и повреждения, вызванные инициирующим событием.
[42] Инициирующее событие может представлять собой столкновение с участием одного или более транспортных средств, как описано. Однако в инициирующем событии не обязательно должны участвовать какие-либо из транспортных средств, и инициирующее событие не обязательно должно представлять собой относящееся к автомобилям событие. Например, инициирующее событие может представлять собой событие, относящееся к применениям в обороне и национальной безопасности. Инициирующее событие может принимать любую из различного типа форм, так как система 10 представляет собой инструмент наблюдения на основе краудсорсинга, который может фиксировать интересующую среду в интересующее время. Все, что комплект датчиков транспортных средств может воспринимать, может классифицироваться в качестве события. В связи с этим в инициирующем событии не обязательно должно участвовать какое-либо транспортное средство – все, что имеет значение, это то, что релевантные данные о событии могут собираться с находящихся поблизости транспортных средств.
[43] Пример различного типа инициирующего события представляет собой событие оружейного выстрела. При работе три транспортных средства воспринимают волну давления от оружейного выстрела и инициируют событие оружейного выстрела. Транспортные средства передают инициацию сообщения о событии оружейного выстрела краудсорсинговому серверу 12. Краудсорсинговый сервер 12 кластеризует три отдельных инициации события в одно событие. Краудсорсинговый сервер 12 знает местоположение и время приема волны давления, что позволяет идентифицировать локализацию источника волны давления. Краудсорсинговый сервер 12 оповещает полицию об области для дополнительного расследования. Подобным образом, например, инициирующее событие может представлять собой обнаружение оружейного выстрела внешним микрофоном транспортного средства. В этом случае данные датчиков микрофонов от всех из находящихся поблизости транспортных средств могут использоваться для триангуляции исходной точки оружейного выстрела.
[44] Другой пример различного типа инициирующего события представляет собой охранную сигнализацию в области. При работе транспортные средства, движущиеся в области, слышат охранную сигнализацию, выдающую громкий звук. Транспортные средства инициируют возможное событие кражи. Краудсорсинговый сервер 12 объединяет эти отдельные события в одно событие на основе вероятностного моделирования и оповещает полицию об области для дополнительного расследования.
[45] В другом примере различного типа инициирующего события участвует транспортное средство, выключенное и припаркованное на обочине автомагистрали. Транспортные средства, движущиеся по автомагистрали, воспринимают выключенное транспортное средство на обочине автомагистрали и не перемещающееся. Транспортные средства сообщают краудсорсинговому серверу 12 о том, что имеется брошенное или вышедшее из строя транспортное средство в определенном местоположении с уникальными метками события. Краудсорсинговый сервер 12 кластеризует события в одну метку с использованием мультимодального вероятностного моделирования и сообщает о припаркованном транспортном средстве дорожно-патрульной службе.
[46] Другой пример различного типа инициирующего события включает в себя сообщение о нарушении правил дорожного движения. Описанные примеры различного типа инициирующего события являются несколькими из многих различных инициирующих событий, которые могут фиксироваться системой 10.
[47] Теперь со ссылкой на Фигуру 3 с непрерывной ссылкой на Фигуры 1 и 2 показана схема системы 10, использующей транспортные средства, участвовавшие в столкновении, находящиеся поблизости транспортные средства и находящиеся поблизости блоки TSI. В качестве примера, транспортные средства, участвовавшие в столкновении, включают в себя первое и второе транспортные средства 16a и 16b, а транспортные средства и блоки TSI, находящиеся поблизости от столкновения во время столкновения, включают в себя третье и четвертое транспортные средства 16c и 16d и первый блок 18a TSI. Как указано на Фигуре 3, первое, третье и четвертое транспортные средства 16a, 16c и 16d двигаются по однополосной дороге, а второе транспортное средство 16b пытается войти и присоединиться к перемещающемуся дорожному движению.
[48] Второе транспортное средство 16b не видит первое транспортное средство 16a и входит в его траекторию. Между первым и вторым транспортными средствами 16a и 16b происходит столкновение. И первое, и второе транспортные средства 16a и 16b распространяют флажки оповещения о столкновении. Краудсорсинговый сервер 12 немедленно принимает эти сообщения и группирует их вместе на основе близости. Первое и второе транспортные средства 16a и 16b выбирают релевантные данные датчиков, сжимают их и далее загружают во временном диапазоне до и после столкновения.
[49] Местная аварийно-диспетчерская служба принимает уведомление об аварии и информацию о серьезности. Серьезность вычисляется модулем управления системой пассивной безопасности (RCM), который знает статус раскрытия подушки безопасности. В этом примере серьезность сообщается как низкая так, что аварийно-спасательные службы не запрашиваются. База данных местного дорожного движения обновляется с информацией об аварии и автоматически контролирует затор дорожного движения в области для перенаправления водителей в области.
[50] Третье и четвертое транспортные средства 16c и 16d принимают по меньшей мере один из флажков оповещения о столкновении. Первый блок 18a TSI в области также инициируется по меньшей мере одним из флажков оповещения о столкновении. Третье и четвертое транспортные средства 16c и 16d и блок 18a TSI контактируют с краудсорсинговым сервером 12, который дает им команду на начало загрузки их релевантных данных датчиков. Краудсорсинговый сервер 12 группирует все из этих данных датчиков в уникальный идентификатор события аварии или с помощью подобной группировки метаданных.
[51] И третье, и четвертое транспортные средства 16c и 16d имеют хорошую видимость столкновения с помощью их соответственного комплекта датчиков. Блок 18a TSI представляет собой камеру дорожного движения, и он также имеет хорошую видимость столкновения. Третье транспортное средство 16c имеет данные датчиков, которые включают в себя видео с камеры заднего вида и обращенные назад дальномерные датчики. Четвертое транспортное средство 16d имеет данные датчиков, которые включают в себя видео с обращенной вперед камеры, дальномерные данные от установленного спереди радара и карту лидара.
[52] Анализ после столкновения с использованием краудсорсинговых данных определяет, что столкновение представляет собой событие низкой степени серьезности в местоположении X, обозначенном на Фигуре 3 символом звездочки, имеющим ссылочную позицию 33. На видео видно, как второе транспортное средство 16b врезается в первое транспортное средство 16a, входя в перемещающееся дорожное движение. Видео с третьего транспортного средства 16c показывает и данные датчиков с четвертого транспортного средства 16d указывают на то, что на автомагистрали отсутствуют обломки, и что дорога безопасна для продолжения движения. Алгоритм ситуационного анализа, например, краудсорсингового сервера 12, определяет, что второе транспортное средство 16b является виновным в этом столкновении. Не требуется отправлять на место происшествия офицера полиции для расследования столкновения. Эта работа системы 10 отличается от традиционного столкновения, так как серьезность становится известна немедленно от данных датчиков из толпы, и ответственность становится вскоре известна после последующей обработки данных датчиков.
[53] Технологии, которые могут использоваться для определения, какие данные датчиков являются релевантными, включают в себя использование различных типов кластеризации для группировки полезных данные и далее применение теории графов для определения, какие из этих данных являются наиболее релевантными. Простая инициация на основе времени и расстояния до инициирующего события может использоваться для инициации загрузки транспортными средствами и блоками TSI их данных датчиков на краудсорсинговый сервер 12. Это дает все данные датчиков от инфраструктуры и транспортных средств с подключением к Интернету в пределах расстояния от инициирующего события в пределах определенного временного интервала возникновения инициирующего события. Этот набор данных может содержать некоторые ненужные и потенциально ошибочные данные. Выполнение высокоразмерной кластеризации и классификации на основе множественных параметров датчиков и далее применение теории графов может использоваться для фильтрации релевантных данных датчиков и далее нахождения наиболее статистически значимых данных.
[54] Как описано, транспортные средства имеют постоянно увеличивающийся комплект датчиков, который включает в себя 360-градусные камеры, микрофоны, радары/дальномерные датчики, GPS и т.п. Все из этих датчиков могут быть полезными для понимания тонких нюансов событий столкновений. Данные CAN транспортных средств могут быть также важными; данные, такие как положение дросселя, входные данные рулевого управления и ускорение ходовой части от множества транспортных средств, будут давать дополнительное представление о событии.
[55] Профили или модели могут создаваться на основе прошлых данных датчиков для определения, является ли водитель осторожным или опасным водителем. Все из них могут вводиться в модели страхования для более точной количественной оценки водителей. Иски по страхованию будут намного более простыми и легкими с записанным видео события, так как возможность обмана значительно уменьшается. Применение слияния краудсорсинговых данных датчиков от транспортных средств и инфраструктуры с подключением к Интернету будет давать еще более хорошие данные и аналитику для выполнения более точного и менее подверженного обману послеаварийного анализа. Это раскрытие фокусируется на событиях столкновений, но система 10 применима к любому событию, в котором представлены транспортные средства и/или инфраструктура с подключением к Интернету.
[56] Несмотря на то, что выше описаны примерные варианты выполнения, не предполагается, что эти варианты выполнения описывают все возможные формы настоящего изобретения. Точнее, слова, используемые в описании, представляют собой слова описания, а не ограничения, и понятно, что различные изменения могут быть выполнены без отклонения от замысла и объема охраны настоящего изобретения. Дополнительно, признаки по-разному осуществляемых вариантов выполнения могут быть объединены для образования дополнительных вариантов выполнения настоящего изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| МОБИЛЬНОЕ ОБНАРУЖЕНИЕ ОРУЖЕЙНОГО ВЫСТРЕЛА | 2014 |
|
RU2679338C2 |
| СИСТЕМА АВТОМАТИЗИРОВАННОГО МОНИТОРИНГА СООТВЕТСТВИЯ СИГНАЛОВ И АВАРИЙНОГО ОПОВЕЩЕНИЯ | 2020 |
|
RU2812263C2 |
| ЭЛЕКТРОННЫЙ КОНТРОЛЛЕР | 2021 |
|
RU2833343C1 |
| СИСТЕМА УПРАВЛЕНИЯ И ВЫЧИСЛЕНИЙ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2654162C2 |
| СХЕМА РАЗМЕЩЕНИЯ КОМПОНЕНТОВ ТРАНСПОРТНОГО СРЕДСТВА | 2010 |
|
RU2482985C1 |
| Комплекс оповещения участников дорожного движения для предотвращения их столкновений | 2024 |
|
RU2836064C1 |
| СПОСОБ АНАЛИЗИРОВАНИЯ ДАННЫХ, ПОЛУЧЕННЫХ ОТ ОБЪЕДИНЕННЫХ ДЕТЕКТОРОВ РАДАРОВ | 2010 |
|
RU2515465C2 |
| СПОСОБ И СИСТЕМА ДЛЯ ПРЕДОТВРАЩЕНИЯ ПРОИСШЕСТВИЙ | 2015 |
|
RU2711835C2 |
| РАСПРЕДЕЛЕННАЯ СИСТЕМА ОДНОВРЕМЕННОЙ ГРУППОВОЙ ФИКСАЦИИ СОБЫТИЙ | 2022 |
|
RU2790984C1 |
| СИСТЕМА И СПОСОБ ОБРАБОТКИ, СОХРАНЕНИЯ И ПЕРЕДАЧИ ДАННЫХ ОТ ПО МЕНЬШЕЙ МЕРЕ ОДНОГО ПОДВИЖНОГО ОБЪЕКТА | 2021 |
|
RU2839362C1 |

Заявленное изобретение относится к краудсорсинговому серверу, который принимает данные датчиков от транспортных средств в непосредственной близости от местоположения события во время события в ответ на уведомление транспортных средств о возникновении события. Данные датчиков включают в себя данные датчиков транспортных средств, воспринимаемые во время события. Краудсорсинговый сервер связывает данные датчиков с событием. Изобретение обеспечивает возможность ускоренного определения факта происшествия и максимально точное определение места происшествия. 2 н. и 10 з.п. ф-лы, 3 ил.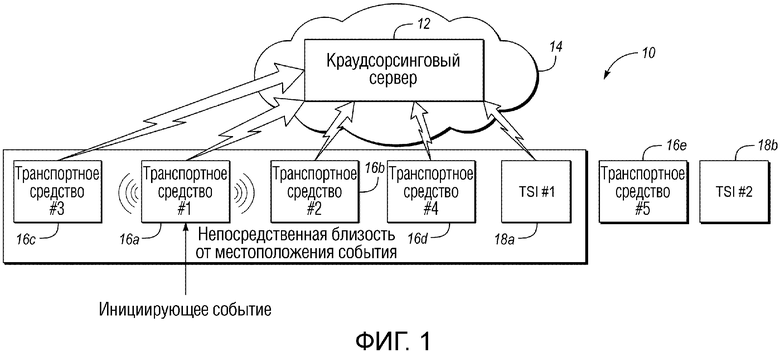
1. Способ обработки событий на основе краудсорсинга, содержащий этапы, на которых:
обнаруживают датчиками транспортных средств оружейный выстрел;
передают от транспортных средств данные датчиков, включающие в себя местоположения транспортных средств, воспринятые во время оружейного выстрела, на сервер;
связывают сервером данные датчиков с одним событием на основе того, что упомянутые местоположения транспортных средств находятся рядом и данные датчиков восприняты в одно время; и
осуществляют триангуляцию сервером местоположения упомянутого события по связанным данным датчиков.
2. Способ по п. 1, в котором:
этап обнаружения датчиками транспортных средств оружейного выстрела включает в себя обнаружение оружейного выстрела датчиками микрофонов транспортных средств.
3. Способ по п. 1, в котором:
этап обнаружения датчиками транспортных средств оружейного выстрела включает в себя обнаружение оружейного выстрела датчиками давления.
4. Способ по п. 1, дополнительно содержащий этапы, на которых:
распространяют одним из транспортных средств оповещение с использованием связи между транспортными средствами (V2V) на другие транспортные средства в непосредственной близости от упомянутого одного из транспортных средств во время оружейного выстрела; и
передают от транспортных средств в непосредственной близости от упомянутого одного из транспортных средств в ответ на оповещение данные датчиков, включающие в себя местоположения транспортных средств, воспринятые во время выстрела, на сервер.
5. Способ по п. 1, в котором:
данные датчиков некоторого одного из транспортных средств дополнительно включают в себя данные датчиков, указывающие внешнюю среду упомянутого одного из транспортных средств.
6. Способ по п. 1, дополнительно содержащий этапы, на которых:
распространяют одним из транспортных средств оповещение с использованием связи между транспортными средствами и инфраструктурой (V2I) на блоки инфраструктуры транспортной системы, расположенные смежно с проезжей частью, в непосредственной близости от упомянутого одного из транспортных средств во время оружейного выстрела; и
передают от блоков инфраструктуры транспортной системы в ответ на прием оповещения данные датчиков блоков инфраструктуры транспортной системы, воспринятые во время выстрела, на сервер.
7. Способ по п. 1, дополнительно содержащий:
воссоздание события с использованием связанных данных датчиков.
8. Способ по п. 1, в котором:
данные датчиков некоторого одного из транспортных средств дополнительно включают в себя данные датчиков, указывающие рабочее состояние упомянутого одного из транспортных средств.
9. Способ по п. 8, в котором:
рабочее состояние упомянутого одного из транспортных средств включает в себя по меньшей мере одно из рабочего состояния рулевого управления, рабочих данных о положении дросселя, рабочих данных об ускорении ходовой части упомянутого одного из транспортных средств.
10. Система обработки событий на основе краудсорсинга, содержащая:
множество транспортных средств, каждое из которых имеет множество датчиков, причем датчики каждого транспортного средства включают в себя датчик микрофона и/или датчик давления;
сервер, расположенный удаленно от транспортных средств;
при этом транспортные средства выполнены с возможностью передачи на сервер своих данных датчиков, включающих в себя местоположения транспортных средств, воспринятые во время оружейного выстрела, когда оружейный выстрел обнаружен датчиком микрофона и/или датчиком давления из датчиков транспортных средств; и
сервер выполнен с возможностью связывания данных датчиков с одним событием на основе того, что упомянутые местоположения транспортных средств находятся рядом и данные датчиков восприняты в одно время, и осуществления триангуляции местоположения упомянутого события по связанным данным датчиков.
11. Система по п. 10, в которой:
данные датчиков некоторого одного из транспортных средств дополнительно включают в себя данные датчиков, указывающие рабочее состояние упомянутого одного из транспортных средств.
12. Система по п. 11, в которой:
рабочее состояние упомянутого одного из транспортных средств включает в себя по меньшей мере одно из рабочего состояния рулевого управления, рабочих данных о положении дросселя, рабочих данных об ускорении ходовой части упомянутого одного из транспортных средств.
| US 2014324247 A1, 30.10.2014 | |||
| US 2012242511 A1, 27.09.2012 | |||
| US 2012256769 A1, 11.10.2012 | |||
| US 2007050191 A1, 01.03.2007. |

