Система централизованного управления автоматическим накоплением и распределением подвесных сидений подвесного устройства для посадки пассажиров
Область техники, к которой относится изобретение
Настоящее изобретение относится к технической области подвесных устройств, используемых в угольных шахтах для посадки и транспортировки пассажиров, в частности, к системе централизованного управления автоматическим накоплением и распределением подвесных сидений подвесного устройства для посадки пассажиров.
Предпосылки к созданию изобретения
Горно-шахтная пассажирская канатная дорога (подвесное устройство для посадки пассажиров) главным образом предназначена для перевозки персонала в наклонных или горизонтальных выработках угольных шахт, при этом их принцип действия аналогичен принципу действия туристической канатной дороги, устанавливаемой на поверхности земли. Двигатель приводит в действие фрикционное колесо, установленное на редукторе и функционирующее в качестве приводного устройства, и подвесной совершающий движение по замкнутому кругу однонаправленный стальной проволочный канат выступает в качестве тягового транспортного механизма. Натяжение стального проволочного каната осуществляется задним натяжным устройством, и при движении опорой стальному проволочному канату служит канатный шкив, предназначенный для поддержания степени натяжения стального проволочного каната между движущимися по канату колесами. Канатное зажимное устройство служит для соединения пассажирского подвесного сидения со стальным проволочным канатом, и данное устройство совершает движение по кругу с целью обеспечения транспортировки персонала.
При использования такой системы накопление и извлечение подвесных сидений являются трудоемкой задачей ввиду большой занимаемой площади, повышающей рабочую нагрузку на обслуживающий персонал. Таким образом, настоящее изобретение предусматривает создание автоматической системы централизованного управления накоплением и распределением подвесных сидений для посадки пассажиров.
Сущность изобретения
Целью настоящего изобретения является создание автоматической системы централизованного управления накоплением и распределением подвесных сидений для посадки пассажиров, с целью решения проблем, известных из предшествующего уровня техники, в частности, проблем, связанных со складированием, извлечением и отправкой подвесных сидений; с большой занимаемой площадью и повышенной рабочей нагрузкой на обслуживающий персонал.
Для достижения указанной цели предусматривается создание нижеприведенной технической схемы, а именно: автоматической системы централизованного управления накоплением и распределением подвесных сидений подвесного устройства для посадки пассажиров, включающей робот-накопитель подвесных сидений, подвесной путь для накопления подвесных сидений, робот-распределитель подвесных сидений, подвесной путь для распределения подвесных сидений, накопительную стойку для подвесных сидений и систему управления.
Робот-накопитель подвесных сидений включает два серводвигателя, продольную балку, роторный пневматический цилиндр и фиксаторы, в котором один серводвигатель сопрягается с роликом для приведения в действие робота-накопителя подвесных сидений для перемещения в поперечном направлении на накопительной рельсовой балке, в то время как второй серводвигатель приводит в действие продольную балку для ее перемещения в направлении вверх и вниз, при этом два серводвигателя взаимно закреплены в монтажных рамах, роторный пневматический цилиндр установлен на нижнем конце продольной балки, и конец роторного вала роторного пневматического цилиндра неподвижно закреплен фиксатором с помощью болта.
Робот-накопитель подвесных сидений соответственно установлен на накопительной рельсовой балке, и два конца накопительной рельсовой балки соответствуют непосредственно накопительному входному порту накопительной стойки для подвесных сидений и задней части подвесного сидения на подвесном пути посадки пассажиров.
Конструкции робота-распределителя подвесных сидений и робота-накопителя подвесных сидений являются идентичными.
Робот-распределитель подвесных сидений соответственно установлен на подвесном пути распределения подвесных сидений, и два конца подвесного пути распределения подвесных сидений непосредственной соответствуют распределительному входному порту накопительной стойки для подвесных сидений и начальной части подвесного сидения на подвесном пути посадки пассажиров.
Фотоэлектрические выключатели установлены на двух концах подвесного пути накопления подвесных сидений и подвесного пути распределения подвесных сидений соответственно.
Подвесной путь для накопления подвесных сидений включает балочную транспортную раму подвесного пути и устройство для подвешивания подвесного сидения.
(1) Балочная транспортная рама включает рельсовую балку для подвесных сидений, тяговую цепь и приводное устройство, и рельсовая балка для подвесных сидений представляет собой замкнутую эллиптическую рельсовую балку, при этом тяговая цепь закреплена на внешней стенке рельсовой балки для подвесных сидений, и пластина, препятствующая слетанию тяговой цепи, размещена на нижней стороне внешней стенки рельсовой балки для подвесных сидений. Кроме того, приводной двигатель размещен на рельсовой балке для подвесных сидений, и редуктор установлен на выходном валу приводного двигателя, в то время как приводные механизмы установлены на выходном валу редуктора. Приводной механизм соединен с тяговой цепью в адаптивном режиме управления, и тяговая цепь приводится в действие для кругового перемещения по внешней стенке рельсовой балки для подвесных сидений с помощью приводных механизмов.
(2) Устройство для подвешивания подвесного сидения включает подвесной кронштейн, зажимное кольцо и датчик давления. Подвесной кронштейн, закрепленный на рельсовой балке для подвесных сидений, жестко соединен с тяговой цепью с помощью крепежного зажима. При этом вращающаяся тяговая цепь служит в качестве приводного механизма подвесного кронштейна, который снабжен опорным роликом, опирающимся на рельсовую балку для подвесных сидений. Зажимное кольцо приварено к нижнему концу подвесного кронштейна, и указанное кольцо используется для накопления и создания опоры для подвесных сидений, и датчик давления размещен в положении контакта зажимного кольца с подвесным сидением.
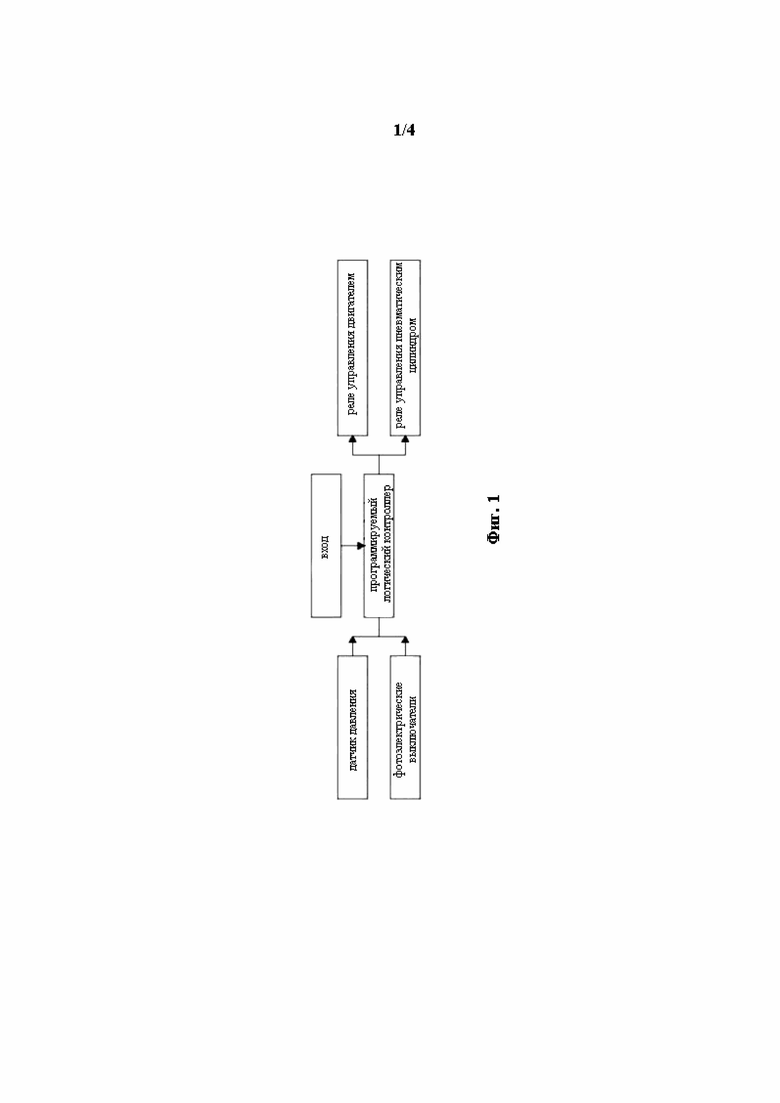
Система управления включает пульт управления и электрический шкаф управления, в которой электрический шкаф управления включает ПЛК (программируемый логический контроллер), реле управления двигателем и реле управления пневматическим цилиндром. Вход пульта управления соединен с выходом датчика давления и портом вывода фотоэлектрического выключателя, при этом устройство вывода пульта управления соединено со входом ПЛК. Выход ПЛК соединен с реле управления двигателем и реле управления пневматическим цилиндром, и реле управления двигателем и реле управления пневматическим цилиндром соответственно соединены с устройством вывода двигателя и пневматического цилиндра робота-распределителя подвесных сидений и робота-накопителя подвесных сидений.
Предпочтительно, чтобы фиксатор робота-распределителя подвесных сидений являлся электромагнитным фиксатором или приводным фиксатором пневматического цилиндра.
Предпочтительно, чтобы фотоэлектрические выключатели на подвесном пути для накопления подвесных сидений и подвесном пути для распределения подвесных сидений соответственно были размещены у накопительного отверстия накопительной стойки для подвесных сидений, у хвостовой части подвесного сидения на подвесном пути посадки пассажиров; у распределительного отверстия подвесного пути для накопления подвесных сидений и начальной части подвесного сидения на подвесном пути посадки пассажиров.
Предпочтительно, чтобы дисплей был встроен в пульт управления, и дисплей являлся сенсорным дисплеем.
Предпочтительно, чтобы шкаф управления, описание которого приведено выше, дополнительно включал блок электропитания, и выход описанного блока электропитания был соединен с выходным интерфейсом ПЛК (программируемым логическим контроллером).
По сравнению с существующей технологией преимущества указанных подвесных сидений заключаются в интегрировании функций накопления и распределения подвесных сидений с целью повышения общей эффективности системы, кроме того, за счет использования режима управления, осуществляемого электромеханическим блоком, обеспечивается дистанционное управление со стороны операторов и сокращение объемов ручного труда.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
ФИГ. 1 – блок-схема системы настоящего изобретения
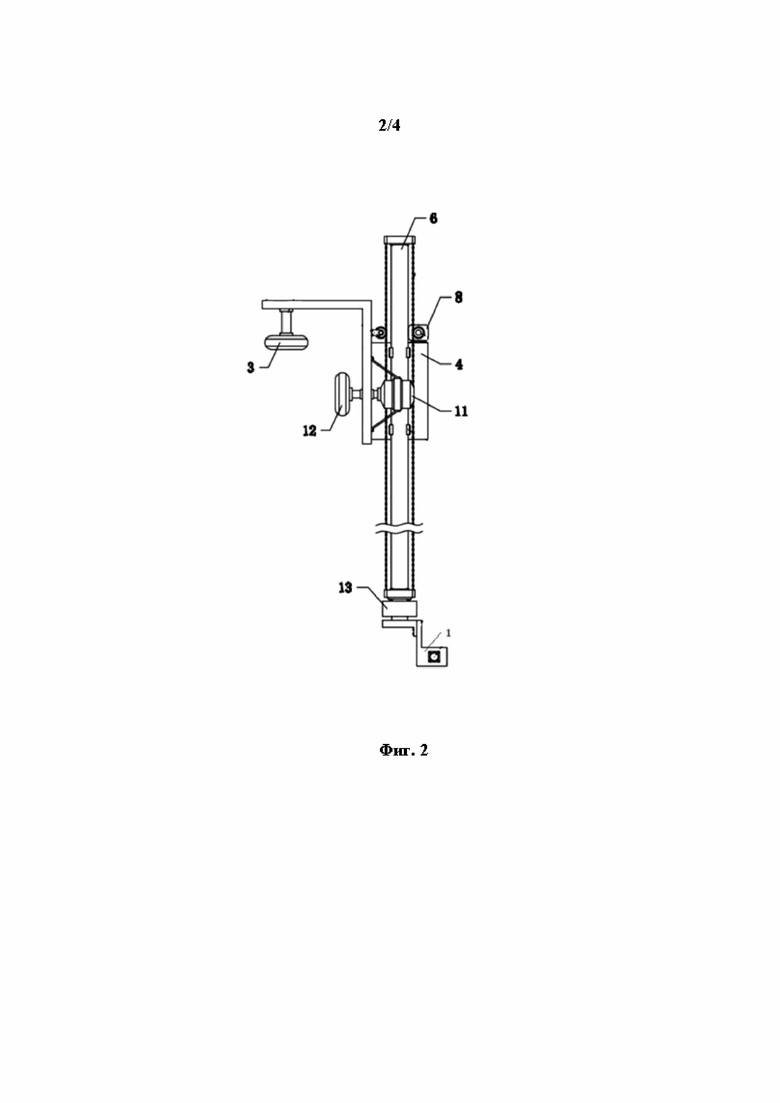
ФИГ. 2 – робот-накопитель подвесных сидений настоящего изобретения
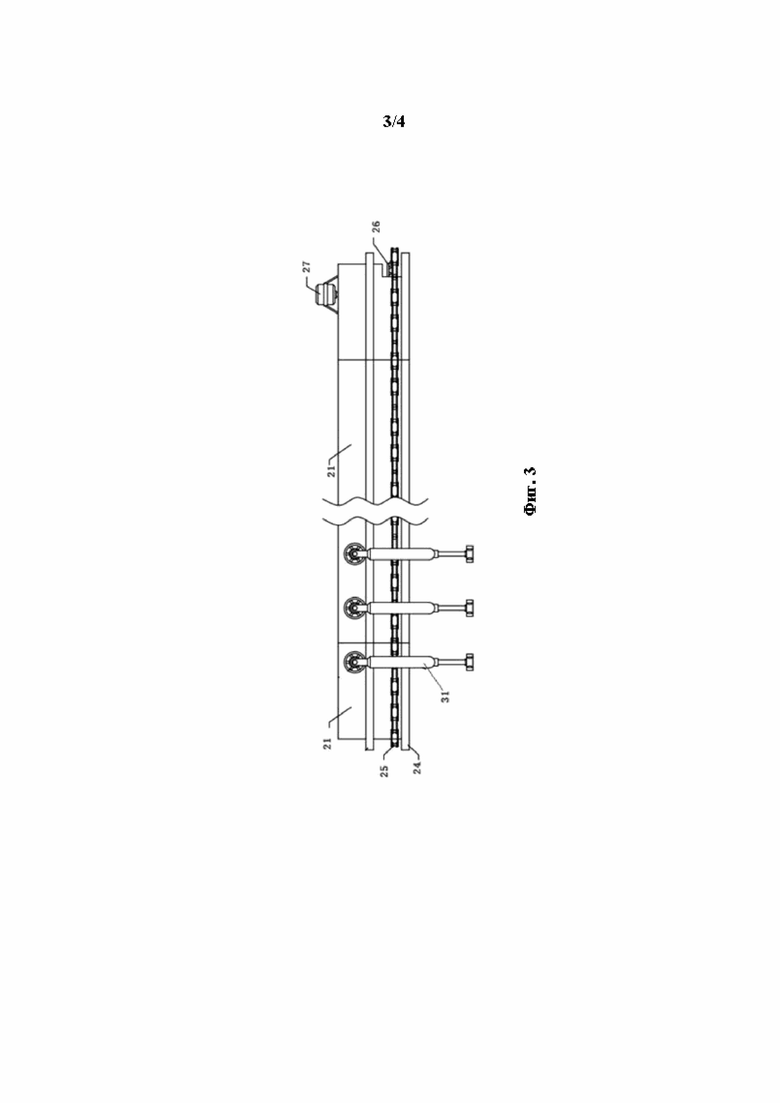
ФИГ. 3 –накопительная стойка для подвесных сидений настоящего изобретения
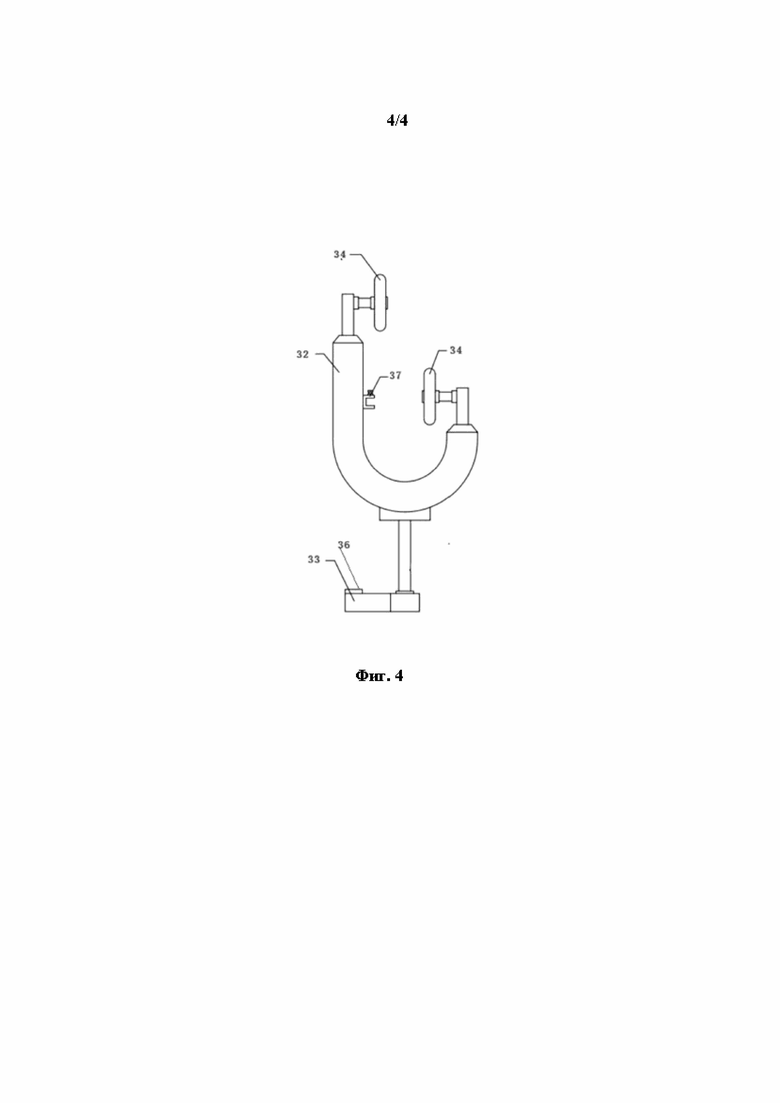
ФИГ. 4 – устройство для подвешивания подвесного сидения настоящего изобретения
1 - фиксатор, 3 - ролики, 4 – монтажная рама, 6 - продольная балка, 8 - второй серводвигатель, 11 - первый серводвигатель, 12 - ролики, 13 – роторный цилиндр, 21 – рельсовая балка для подвесных сидений, 25 - тяговая цепь, 24 - пластина, препятствующая слетанию тяговой цепи, 26 - приводной механизм, 27 - приводной двигатель, 31 - устройство для подвешивания подвесных сидений, 32 - подвесной кронштейн, 33 - зажимное кольцо, 34 - опорные ролики, 36 - датчик давления и 37 - крепежный зажим.
Конкретный вариант реализации настоящего изобретения
Ниже приведено подробное и полное описание технических решений, используемых в вариантах реализации настоящего изобретения, со ссылками на прилагаемые рисунки настоящего изобретения. Вполне понятно, описанные ниже варианты реализации являются лишь частью вариантов реализации настоящего изобретения, а не всеми вариантами реализации. Все иные варианты реализации, созданные специалистами в данной области техники на основе вариантов реализации настоящего изобретения без творческих усилий, находятся в пределах объема патентной охраны настоящего изобретения.
Как проиллюстрировано на ФИГ. 1-4, в соответствии с технической схемой настоящее изобретение предусматривает создание системы централизованного управления автоматическим накоплением и распределением подвесных сидений подвесного устройства для посадки пассажиров, отличающейся тем, что автоматическая система централизованного управления накоплением и распределением указанных подвесных сидений подвесного устройства для посадки пассажиров включает робот-накопитель подвесных сидений, подвесной путь для накопления подвесных сидений, робот-распределитель подвесных сидений, подвесной путь для распределения подвесных сидений, накопительную стойку для подвесных сидений и систему управления.
Робот-накопитель подвесных сидений включает два серводвигателя, продольную балку, роторный пневматический цилиндр и фиксатор. Первый серводвигатель 11 и направляющие ролики 3 и 12 используются для приведения в действие робота-накопителя подвесных сидений для смещения в поперечном направлении и перемещения по подвесному пути для накопления подвесных сидений, при этом второй серводвигатель 8 приводит в действие продольную балку 6 для ее перемещения в направлении вверх и вниз, при этом два серводвигателя взаимно зафиксированы с помощью монтажной рамы 4. Кроме того, роторный пневматический цилиндр 13 размещен на нижнем конце продольной балки, и конец роторного вала роторного пневматического цилиндра закреплен фиксатором 1 с помощью болта.
Робот-накопитель подвесных сидений соответственно установлен на подвесной накопительной рельсовой балке, и два конца подвесной накопительной рельсовой балки непосредственно соответствуют входному порту накопительной стойки для подвесных сидений и задней части подвесного сидения на подвесном пути посадки пассажиров.
Конструкции робота-накопителя подвесных сидений и робота-распределителя подвесных сидений являются идентичными.
Робот-распределитель подвесных сидений соответственно установлен на подвесном пути распределения подвесных сидений, и два конца подвесного пути распределения подвесных сидений соответствуют распределительному отверстию накопительной стойки для подвесных сидений и начальной части подвесного сидения на подвесном пути посадки пассажиров соответственно.
Фотоэлектрические выключатели установлены на двух концах подвесного пути накопления подвесных сидений и подвесного пути для распределения подвесных сидений соответственно.
Подвесной путь для накопления подвесных сидений включает балочную транспортную раму и устройство для подвешивания подвесного сидения.
Балочная транспортная рама включает рельсовую балку 21 для подвесных сидений, тяговую цепь 25 и приводное устройство, при этом рельсовая балка для подвесных сидений представляет собой замкнутую эллиптическую рельсовую балку. Тяговая цепь размещена по внешней стенке подвесного рельса для подвесных сидений, и пластина 24, препятствующая слетанию тяговой цепи, размещена на нижней стороне внешней стенки рельсовой балки для подвесных сидений. Приводной двигатель 27 размещен на рельсовой балке для подвесных сидений, и редуктор установлен на выходном валу приводного двигателя. Приводной механизм 26 установлен на выходном валу редуктора и входит в зацепление с тяговой цепью в адаптивном режиме управления, и тяговая цепь приводится в действие приводным механизмом для кругового перемещения по внешней стенке рельсовой балки для подвесных сидений.
Устройство для подвешивания подвесного сидения включает подвесной кронштейн 32, зажимное кольцо 33 и датчик давления 36, в котором подвесной кронштейн закреплен на рельсовой балке 21 для подвесных сидений. Подвесной кронштейн жестко соединен с тяговой цепью с помощью крепежного зажима, и вращающаяся тяговая цепь служит в качестве приводного механизма подвесного кронштейна. Подвесной кронштейн снабжен опорным роликом 34, опирающимся на рельсовую балку для подвесных сидений, и зажимное кольцо 33 приварено на нижнем конце подвесного кронштейна, при этом указанное кольцо используется для накопления и в качестве опоры подвесных сидений, и датчик давления размещен в положении контакта зажимного кольца с подвесным сидением.
Система управления включает пульт управления и электрический шкаф управления, в которой электрический шкаф управления включает ПЛК (программируемый логический контроллер), реле управления двигателем и реле управления пневматическим цилиндром. Вход пульта управления соединен с выходом датчика давления и выходным портом фотоэлектрического выключателя, в то время как управляющий выход пульта управления соединен со входом ПЛК. При этом выход ПЛК соединен с реле управления двигателем и реле управления пневматическим цилиндром. Реле управления двигателем и реле управления пневматическим цилиндром соответственно соединены с выходными устройствами двигателя и пневматического цилиндра робота-распределителя подвесных сидений и робота-накопителя подвесных сидений.
Кроме того, фиксатор описанного выше робота-накопителя подвесных сидений является электромагнитным фиксатором или приводным фиксатором пневматического цилиндра. Подвесной путь накопления подвесных сидений и фотоэлектрический выключатель на подвесном пути распределения подвесных сидений соответственно размещены у накопительного порта накопительной стойки для подвесных сидений, хвостовой части подвесного пути пассажирских подвесных сидений, у распределительного отверстия накопительной рамы подвесных сидений и у начальной части подвесного сидения на подвесном пути посадки пассажиров. Кроме того, дисплей встроен в пульт управления, и дисплей является сенсорным дисплеем. Шкаф управления дополнительно включает блок электропитания, выход которого соединен с выходным интерфейсом ПЛК.
Модель ПЛК s7-300 компании «Siemens» выбрана для включения в систему управления настоящего изобретения.
Принцип действия
Подвесной путь для накопления подвесных сидений и фотоэлектрические выключатели на подвесном пути распределения подвесных сидений используются для ограничения исходного положения робота-накопителя подвесных сидений и робота-распределителя подвесных сидений. При перекрывании луча света, испускаемого фотоэлектрическим выключателем, прекращается перемещение робота-накопителя подвесных сидений или робота-распределителя подвесных сидений при подаче сигнала с пульта управления и электрического шкафа управления, и, кроме того, обеспечивается также управление перегрузкой («взять и поставить») подвесных сидений.
Накопительная стойка для подвесных сидений и подвесное устройство включают 50 комплектов, и 50 комплектов устройств подвесных сидений равномерно распределены по балочной транспортной раме. Номера 50 устройств подвесных сидений закодированы от 1 до 50 в управляющем программном обеспечении, при этом порядковые номера взаимно однозначно соответствуют датчикам давления на устройствах подвесных сидений. Датчик давления предназначен для определения того, находится ли зажимное кольцо в прижатом состоянии. При значении измеряемого давления, равном нулю, датчик давления указывает на отсутствие нагрузки, в то время как при значении измеряемого давления, указывающего на детектирование силы тяжести, воздействующей на подвесное сидение, обеспечивается обнаружение наличия подвесных сидений, и осуществляется подсчет общего количества подвесных сидений на накопительной раме подвесных сидений в реальном режиме времени.
Накопление: два серводвигателя используются для перемещения робота-накопителя подвесных сидений в x-направлении и z-направлении. Фиксация сидений осуществляется с помощью вращающегося пневматического цилиндра и фиксатора у хвостовой части робота-накопителя подвесных сидений. При фиксации фиксатора поднимается z-ось робота-накопителя подвесных сидений, и пневматический цилиндр поворачивается на 180 градусов. При перемещении робота-накопителя подвесных сидений по x-оси (подвесное сидение в хвостовой части на подвесном пути пассажирских подвесных сидений направляется к накопительному отверстию накопительной рамы подвесных сидений), устройство для подвешивания подвесного сидения без груза поворачивается к накопительному отверстию, z-ось робота-накопителя подвесных сидений опускается (отстегиваемое сидение размещается на свободном месте для складирования).
Распределение: при достижении подвесным устройством пассажирского подвесного сидения выгрузного окна робот-распределитель подвесных сидений использует вращающийся пневматический цилиндр и подъемное устройство по z-оси для извлечения подвесных сидений из окна, далее подвесные сидения транспортируются в направлении по x-оси (транспортирующим стальным проволочным канатом) к начальному концу подвесного пути пассажирских подвесных сидений. Короче говоря, робот-распределитель подвесных сидений используют для проведения операций по распределению подвесных сидений.
Были проиллюстрированы варианты реализации настоящего изобретения и приведено их описание, при этом специалистам в данной области техники должно быть очевидно, что в указанные варианты реализации настоящего изобретения могут быть внесены изменения и дополнения, которые не выходят за пределы существа и объема настоящего изобретения, при этом объем настоящего изобретения определен в прилагаемой формуле изобретения и в ее эквивалентах.
Изобретение относится к технической области подвесных устройств, используемых в угольных шахтах, для перевозки пассажиров, в частности к системе централизованного управления автоматическим накоплением и распределением подвесных сидений подвесного устройства для посадки пассажиров. Автоматическая система централизованного управления накоплением и распределением подвесных сидений подвесного устройства для посадки пассажиров включает робот-накопитель подвесных сидений, подвесной путь для накопления подвесных сидений, робот-распределитель подвесных сидений, подвесной путь для распределения подвесных сидений, накопительную стойку для подвесных сидений и систему управления. Робот-накопитель подвесных сидений включает два серводвигателя, продольную балку, роторный пневматический цилиндр и фиксаторы. Первый серводвигатель сопрягается с роликом для приведения в действие робота-накопителя подвесных сидений для перемещения в поперечном направлении на подвесном пути накопления. Второй серводвигатель приводит в действие продольную балку для ее перемещения в направлении вверх и вниз. При этом два серводвигателя взаимно закреплены в монтажных рамах. Роторный пневматический цилиндр установлен на нижнем конце продольной балки. Система совмещает в себе функции накопления и распределения подвесных сидений. В результате этого повышается работоспособность системы, кроме того, за счет использования режима управления, осуществляемого встроенным электромеханическим блоком, обеспечивается дистанционное управление со стороны операторов и сокращение объемов ручного труда. 4 з.п. ф-лы, 4 ил.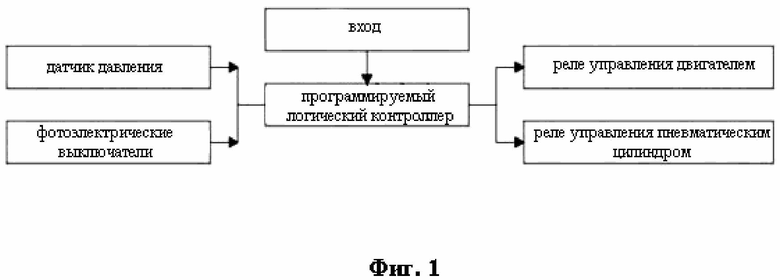
1. Автоматическая система централизованного управления накоплением и распределением подвесных сидений подвесного пассажирского устройства, отличающаяся тем, что система включает робот-накопитель подвесных сидений, подвесной путь для накопления подвесных сидений, робот-распределитель подвесных сидений, подвесной путь для распределения подвесных сидений, накопительную стойку для подвесных сидений и систему управления, при этом
робот-накопитель подвесных сидений включает два серводвигателя, продольную балку, роторный пневматический цилиндр и фиксаторы, причем первый серводвигатель (11) функционально взаимодействует с вращающимися роликами при приведении в действие робота-накопителя подвесных сидений для перемещения в поперечном направлении на подвесном пути для накопления подвесных сидений, второй серводвигатель (8) приводит в действие продольную балку (6) для ее перемещения в направлении вверх и вниз, при этом два серводвигателя взаимно зафиксированы с помощью монтажных рам, роторный пневматический цилиндр (13) установлен на нижнем конце продольной балки, и конец роторного вала роторного пневматического цилиндра снабжен фиксатором, закрепленным болтом, при этом
робот-накопитель подвесных сидений соответственно установлен на накопительной рельсовой балке, и два конца накопительной рельсовой балки непосредственно соответствуют накопительному отверстию накопительной стойки для подвесных сидений и задней части подвесного сиденья на подвесном пути посадки пассажиров,
причем конструкция робота-распределителя подвесных сидений идентична конструкции робота-накопителя подвесных сидений,
робот-распределитель подвесных сидений соответственно установлен на подвесном пути распределения подвесных сидений, причем два конца подвесного пути распределения подвесных сидений непосредственно соответствуют распределительному отверстию накопительной стойки для подвесных сидений и начальной части подвесного сиденья на подвесном пути посадки пассажиров,
фотоэлектрические выключатели установлены на двух концах подвесного пути накопления подвесных сидений и подвесного пути распределения подвесных сидений соответственно,
накопительная стойка для подвесных сидений включает балочную транспортную раму и устройство для подвешивания подвесного сиденья,
балочная транспортная рама (1) включает подвесную рельсовую балку (21), тяговую цепь (25) и приводное устройство, причем подвесная рельсовая балка представляет собой замкнутый рельс эллиптической формы, и тяговая цепь закреплена на внешней стенке подвесной рельсовой балки,
пластина (24), препятствующая слетанию тяговой цепи, размещена на нижней стороне внешней стенки подвесной рельсовой балки, приводной двигатель (27) размещен на подвесной рельсовой балке, кроме того, редуктор размещен на выходном валу приводного двигателя, приводные механизмы (26) размещены на выходном валу редуктора, а приводной механизм соединен с тяговой цепью в адаптивном режиме управления, и тяговая цепь приводится в действие для кругового перемещения по внешней стенке подвесной рельсовой балки с помощью приводного механизма, при этом
устройство для подвешивания (31) включает подвесной кронштейн (32), зажимное кольцо (33) и датчик давления (36), в котором подвесной кронштейн закреплен в подвесной рельсовой балке (21), подвесной кронштейн жестко соединен с тяговой цепью с помощью крепежного зажима, вращающаяся тяговая цепь используется в качестве приводного механизма подвесного кронштейна, подвесной кронштейн снабжен опорным роликом (34), опорный ролик (34) опирается на подвесную рельсовую балку, и зажимное кольцо (33) приварено к нижнему концу подвесного кронштейна и используется для накопления и создания опоры для подвесных сидений, а датчик давления размещен в положении контакта зажимного кольца с подвесным сиденьем, при этом
система управления включает пульт управления и электрический шкаф управления, в которой электрический шкаф управления включает ПЛК (программируемый логический контроллер), реле управления двигателем и реле управления пневматическим цилиндром, вход пульта управления соединен с выходом датчика давления и портом вывода фотоэлектрического выключателя, устройство вывода пульта управления соединено с входом ПЛК, и выход ПЛК соединен с реле управления двигателем и реле управления пневматическим цилиндром, реле управления двигателем и реле управления пневматическим цилиндром соответственно соединены с выходным устройством реле управления двигателем и реле управления пневматическим цилиндром робота- распределителя подвесных сидений и робота-накопителя подвесных сидений.
2. Система по п. 1, отличающаяся тем, что фиксатор робота-накопителя подвесных сидений является фиксатором электромагнитного типа или приводным фиксатором пневматического цилиндра.
3. Система по п. 1, отличающаяся тем, что фотоэлектрические выключатели на подвесном пути для накопления подвесных сидений и подвесном пути для распределения подвесных сидений соответственно размещены у накопительного отверстия накопительной стойки для подвесных сидений, у хвостовой части подвесного пути посадки пассажиров, у распределительного отверстия накопительной стойки для подвесных сидений и начальной части подвесного сиденья на подвесном пассажирском пути.
4. Система по п. 1, отличающаяся тем, что дисплей встроен в пульт управления, и дисплей является сенсорным дисплеем.
5. Система по п. 1, отличающаяся тем, что электрический шкаф управления дополнительно включает блок электропитания, электрический выход которого соединен с выходным интерфейсом программируемого логического контроллера.
| CN 205971300 U, 22.02.2017 | |||
| CN 101850771 A, 06.10.2010 | |||
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |
| EP 0245163 A1, 11.11.1987 | |||
| СИСТЕМА ПОДВЕСНОЙ КАНАТНОЙ ДОРОГИ | 2015 |
|
RU2653655C1 |

