УРОВЕНЬ ТЕХНИКИ ИЗОБРЕТЕНИЯ
ОБЛАСТЬ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к системе управления подземной врубовой машины, применяющейся при разработке месторождений угля шахтным способом, в частности, к автоматической системе управления и способу управления врубовой машиной на основе машинного зрения и взаимодействия датчиков.
СУЩЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
По всей территории Китая в большом количестве встречаются тонкие и сверхтонкие угольные пласты. Однако в настоящее время уровень механизации разработки тонких и сверхтонких угольных пластов относительно невысок. Врубовая машина – это устройство, специально предназначенное для разработки тонких и сверхтонких угольных пластов, которое широко применяется благодаря таким преимуществам, как небольшая длина корпуса при значительной мощности. Однако, в настоящее время подъемные работы с бурильной колонной врубовых машин все еще ведутся с использованием однопутного подъемника, подсоединение выполняется в ручном режиме, а все настройки после наращивания осуществляются с использованием механизма на основе храповика и гидравлического цилиндра. Точность регулирования при этом невысока, опускание бурильной колонны занимает много времени, что приводит к снижению эффективности добычи. Также как в Китае, так и за рубежом ведется не так много исследований автоматического управления и регулирования врубовой машины бурового типа. По сравнению с такими устройствами, как современные подземные врубовые машины и горнопроходческие комбайны, врубовая машина бурового типа не обладает достаточным уровнем механизации. Технологический процесс добычи угля с помощью врубовой машины бурового типа не обеспечивает достаточный выход угля, отличается повышенным уровнем энергопотребления и недостаточной эффективностью использования материальных и человеческих ресурсов при разработке тонких и сверхтонких пластов.
Таким образом, разработка автоматической системы управления врубовой машиной на основе машинного зрения и взаимодействия датчиков с относительно высоким уровнем интеграции, позволяющей обеспечить автоматическое наращивание бурильной колонны и вести технологический процесс без человеческого участия, является актуальной.
КРАТКОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Задачи изобретения: Для того, чтобы сгладить недостатки существующего уровня техники, настоящее изобретение предлагает автоматическую систему управления врубовой машиной на основе машинного зрения и взаимодействия датчиков с относительно высоким уровнем интеграции, позволяющую обеспечить автоматическое наращивание бурильной колонны и вести технологический процесс без человеческого участия, что приведет к увеличению надежности работы и сокращению эксплуатационных расходов.
Технические решения: Для достижения заявленных задач в настоящем изобретении применяются следующие технические решения:
Автоматическая система управления врубовой машины на основе машинного зрения и взаимодействия датчиков состоит из основного корпуса врубовой машины, автоматической транспортной системы бурильной колонны и автоматической системы присоединения бурильной колонны, при этом,
основной корпус врубовой машины включает в себя раму буровой машины, боковой опорный механизм, подъемный механизм буровой машины, поворотную платформу бурильной колонны, платформу для продвижения бурильной колонны, рабочую бурильную колонну и опору рабочей бурильной колонны, при этом основной корпус врубовой машины способен перемещаться внутри своей выработки;
рама буровой машины горизонтально расположена на подъемном механизме буровой машины, который предназначен для создания опоры для рамы буровой машины и регулировки ее высоты; боковой опорный механизм включает в себя две пары боковых опорных гидравлических цилиндров, при этом каждая пара боковых опорных гидравлических цилиндров имеет опорный элемент, включающий в себя два телескопических конца; два опорных элемента расположены горизонтально перед рамой буровой машины и за ней соответственно, обеспечивая тем самым поперечную опору и фиксацию рамы буровой машины; платформа для продвижения бурильной колонны расположена на раме буровой машины, а поворотная платформа бурильной колонны – на платформе для продвижения бурильной колонны; рабочая бурильная колонна горизонтально подсоединена к поворотной платформе бурильной колонны таким образом, что поворотная платформа вращает рабочую бурильную колонну, а платформа для продвижения приводит в движение поворотную платформу, в результате чего рабочая бурильная колонна делает поперечную зарубку в стене выработки; опора рабочей бурильной колонны расположена телескопически на раме буровой машины и предназначена для фиксации рабочей бурильной колонны при наращивании;
автоматическая транспортная система бурильной колонны включает в себя подающий гидравлический цилиндр бурильной колонны, подающую платформу бурильной колонны, наращиваемую бурильную колонну, подъемный гидравлический цилиндр и цифровой сигнальный процессор (ЦСП); подающая платформа бурильной колонны расположена перед рамой буровой машины или за ней вдоль длины выработки, при этом подающая платформа соединена с подающим гидравлическим цилиндром, который приводит подающую платформу в движение, в результате чего она продвигается по выработке; наращиваемая бурильная колонна горизонтально поперечно расположена на подающей платформе бурильной колонны с помощью подъемного гидравлического цилиндра, а высота наращиваемой бурильной колонны регулируется подъемным гидравлическим цилиндром; на опоре рабочей бурильной колонны и подъемного гидравлического цилиндра установлены датчики перемещения, а на раме буровой машины установлен предельный выключатель; датчики перемещения и предельный выключатель соединены с ЦСП, а соосность наращиваемой бурильной колонны рабочей бурильной колонне обеспечивается за счет регулирования положения с помощью датчиков перемещения и предельного выключателя;
автоматическая система присоединения бурильной колонны включает в себя телескопическую руку-робота и бинокулярную камеру на приборах с зарядовой связью (ПЗС), при этом телескопическая рука-робот расположена на поворотной платформе бурильной колонны, а бинокулярная камера ПЗС крепится к верхнему концу телескопической руки-робота; расположение по периферии наращиваемой бурильной колонны регулируется с помощью поворотного двигателя, а автоматическое присоединение наращиваемой бурильной колонны к рабочей обеспечивается за счет визуального позиционирования.
Предпочтительно, основной корпус врубовой машины перемещается внутри выработки за счет использования гусеничного транспортного механизма, при этом в нижней части подъемного механизма буровой машины имеются полозья, а рама буровой машины опирается на гусеничные ленты транспортного механизма с помощью полозьев.
Предпочтительно, на обоих концах левого и правого краев рамы буровой машины имеется инфракрасный датчик, а расстояние между врубовой машиной бурового типа и окружностью выработки определяется инфракрасным датчиком в режиме реального времени, что обеспечивает безопасность продвижения врубовой машины.
Предпочтительно, на поворотной платформе бурильной колонны имеется поворотный двигатель и подмоторный кронштейн, с помощью которого поворотный двигатель крепится к платформе для продвижения бурильной колонны.
Предпочтительно, количество поворотных двигателей соответствует количеству рабочих бурильных колонн, а количество телескопических рук-роботов соответствует количеству поворотных двигателей.
Предпочтительно, на соединительном конце рабочей бурильной колонны и на конце наращиваемой бурильной колонны, ближайшем к поворотному двигателю, имеется по первому соединительному устройству, а на выходном конце поворотного двигателя и на конце наращиваемой бурильной колонны, ближайшем к рабочей бурильной колонне, имеется по второму соединительному устройству, при этом первое и второе соединительные устройства имеют цилиндрическую форму, а их внешние торцевые поверхности оснащены трехкулачковым выпукло-вогнутым блоком; противоположные трехкулачковые выпукло-вогнутые блоки стыкуются друг с другом, а на цилиндрических поверхностях первого и второго соединительных устройств имеются по три позиционирующих цилиндра, распределенных через равные промежутки по окружности; центральная ось позиционирующего цилиндра первого соединительного устройства параллельна центральной оси выпуклого блока в составе трехкулачкового выпукло-вогнутого блока первого соединительного устройства, центральная ось позиционирующего цилиндра второго соединительного устройства параллельна центральной оси выпуклого блока в составе трехкулачкового выпукло-вогнутого блока второго соединительного устройства, а центральные оси позиционирующих цилиндров с обоих концов наращиваемой бурильной колонны параллельны друг другу. Соединительное устройство обеспечивает бесшовное соединение бурильной колонны для любого рабочего угла.
Предпочтительно, телескопическая рука-робот установлена на подмоторном кронштейне, при этом телескопическая рука-робот включает в себя первый серводвигатель, второй серводвигатель, третий серводвигатель, четвертый серводвигатель, пятый серводвигатель и шестой серводвигатель; первый серводвигатель обеспечивает вращение телескопической руки-робота в горизонтальной плоскости, второй серводвигатель и третий серводвигатель поднимают и опускают телескопическую руку-робота, четвертый серводвигатель вращает телескопическую руку-робота по окружности, пятый серводвигатель выдвигает и отодвигает телескопическую руку-робота, а шестой серводвигатель вращает бинокулярную камеру ПЗС, которая крепится к телескопической руке-роботу.
Предпочтительно, бинокулярная камера ПЗС имеет функцию мигания, а благодаря периодическому миганию бинокулярная камера ПЗС не забивается пылью в процессе работы.
Предпочтительно, автоматическая система присоединения бурильной колонны также включает в себя карту захвата изображений, промышленный персональный компьютер, исполнительный программируемый логический контроллер (ПЛК) и электрогидравлический пропорциональный клапан; данные, полученные картой захвата изображений с бинокулярной камеры ПЗС, передаются на промышленный персональный компьютер для обработки, промышленный персональный компьютер посылает на исполнительный контроллер ПЛК сигнал об открытии электрогидравлического пропорционального клапана, в результате чего выполняется вращение поворотного двигателя и, соответственно, стыковка между выходным концом поворотного двигателя и наращиваемой бурильной колонны.
Автоматический способ управления врубовой машиной на основе машинного зрения и взаимодействия датчиков, который включает в себя следующие этапы:
этап А: приведение основного корпуса врубовой машины в исходное рабочее положение внутри выработки с помощью гусеничного транспортного механизма, получение данных о расстоянии между врубовой машиной и окружающей выработкой в процессе движения с помощью инфракрасного датчика, установленного на раме буровой машины, и регулировка направления и скорости перемещения основного корпуса врубовой машины в режиме реального времени для управления проходом врубовой машины по длине выработки;
этап B: по приведению основного корпуса врубовой машины в рабочее положение регулировка высоты рамы буровой машины под разработку угольных пластов различной толщины за счет подъемного механизма буровой машины; после подгонки рамы буровой машины под высоту забоя поперечная фиксация основного корпуса врубовой машины с помощью бокового опорного механизма для ведения дальнейшей добычи; вращение рабочей бурильной колонны с помощью поворотного двигателя, приведение в движение поворотной платформы и рабочей бурильной колонны с помощью платформы для продвижения бурильной колонны, выполнение поперечного реза в стенке выработки, выгрузка куска угля на конвейере;
этап C: после полного погружения рабочей бурильной колонны в угольный пласт остановка поворотного двигателя, при этом опора рабочей бурильной колонны поддерживает рабочую бурильную колонну по восходящей траектории; отсоединение выходного конца поворотного двигателя от рабочей бурильной колонны, приведение в движение поворотной платформы рабочей бурильной колонны с помощью платформы для продвижения и наращивание бурильной колонны;
этап D: опускание с помощью мостового крана наращиваемой бурильной колонны на подъемный гидравлический цилиндр и продвижение с помощью подающего гидравлического цилиндра подающей платформы с наращиваемой бурильной колонной на раму буровой машины; после того, как подающая платформа достигнет предельного выключателя, предельный выключатель посылает сигнал на ЦСП, который, в свою очередь, обрабатывает сигнал и подает команду на подающий гидравлический цилиндр об остановке подающей платформы у предельного выключателя, что обеспечивает точное позиционирование наращиваемой бурильной колонны в горизонтальном положении; регулировка высоты наращиваемой бурильной колонны с помощью подъемного гидравлического цилиндра, управление с ЦСП подающим гидравлическим цилиндром с учетом вертикальных позиционирующих координат рабочей бурильной колонны с датчиков перемещения на опоре рабочей бурильной колонны, регулировка высоты наращиваемой бурильной колонны с учетом данных, полученных от датчика перемещения, для точного позиционирования наращиваемой бурильной колонны в вертикальном направлении;
этап E: после соосного позиционирования наращиваемой бурильной колонны получение с помощью бинокулярной камеры ПЗС серии изображений первого соединительного устройства наращиваемой бурильной колонны, передача данных от карты захвата изображений на промышленный персональный компьютер для обработки, получение информации о расположении по периферии позиционирующего цилиндра на первом соединительном устройстве наращиваемой бурильной колонны, регулировка с помощью телескопической руки-робота положения и угола бинокулярной камеры ПЗС для помещения первого соединительного устройства наращиваемой бурильной колонны в центр изображения; по завершению настройки подача с промышленного персонального компьютера на исполнительный контроллер ПЛК сигнала об открытии электрогидравлического пропорционального клапана, который вращает поворотный двигатель, если положение по периферии позиционирующего цилиндра на поворотном двигателе согласно данным бинокулярной камеры ПЗС соответствует положению по периферии для позиционирующего цилиндра на первом соединительном устройстве наращиваемой бурильной колонны, остановка поворотного двигателя так, чтобы трехкулачковый выпукло-вогнутый блок первого соединительного устройства наращиваемой бурильной колонны совместился по окружности с трехкулачковым выпукло-вогнутым блоком второго соединительного устройства на выходном конце поворотного двигателя для точного позиционирования наращиваемой бурильной колонны по окружности; подача с помощью платформы для продвижения бурильной колонны узла наращиваемой бурильной колонны и выходного конца поворотного двигателя в сборе;
этап F: по завершению стыковки наращиваемой бурильной колонны и выходного конца поворотного двигателя подача сигнала от промышленного персонального компьютера на исполнительный контроллер ПЛК для управления открыванием электрогидравлического пропорционального клапана так, чтобы вращать поворотный двигатель под углом, противоположным углу, под которым выполнялось действие на этапе E, в исходное положение, которым в данном случае является центральная ось позиционирующего цилиндра второго соединительного устройства наращиваемой бурильной колонны, параллельная центральной оси позиционирующего цилиндра рабочей бурильной колонны для точного позиционирования наращиваемой бурильной колонны по окружности относительно рабочей бурильной колонны; подача с помощью платформы для продвижения бурильной колонны наращиваемой бурильной колонны и завершение стыковки с рабочей бурильной колонной для выполнения следующего цикла бурения и добычи.
Полезный эффект: Настоящее изобретение предлагает автоматическую систему управления врубовой машиной и способ управления на основе машинного зрения и взаимодействия датчиков, обладающие по сравнению с предыдущим уровнем техники следующими преимуществами: 1. относительно высокая степень интеграции и автоматизации, безопасность и надежность работы, экономия трудозатрат; 2. применение машинного зрения и технологии взаимодействия датчиков с интеграцией процессов проходки, бурения и наращивания бурильной колонны, уменьшение времени, затрачиваемого на наращивание бурильных колонн, что позволяет значительно увеличить эффективность разработки тонких и сверхтонких угольных пластов и сократить эксплуатационные расходы.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фигура 1 – вид сверху основного корпуса врубовой машины согласно настоящему изобретению;
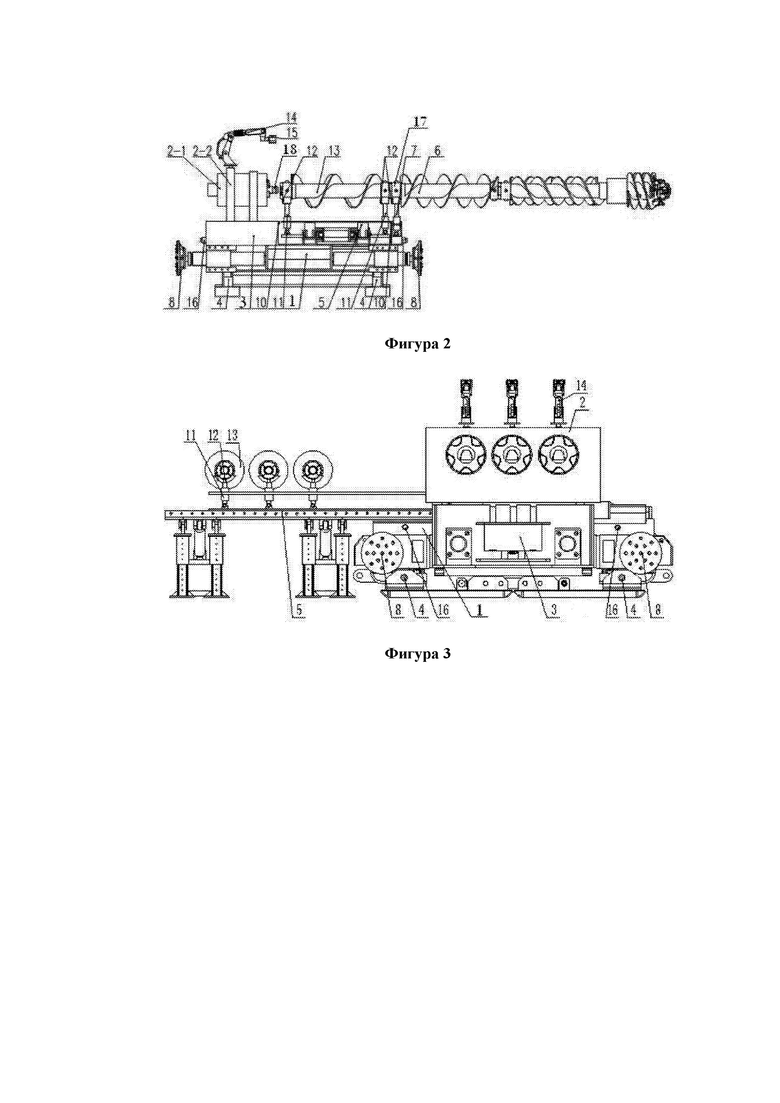
Фигура 2 – главный вид основного корпуса врубовой машины согласно настоящему изобретению;
Фигура 3 – вид слева основного корпуса врубовой машины согласно настоящему изобретению;
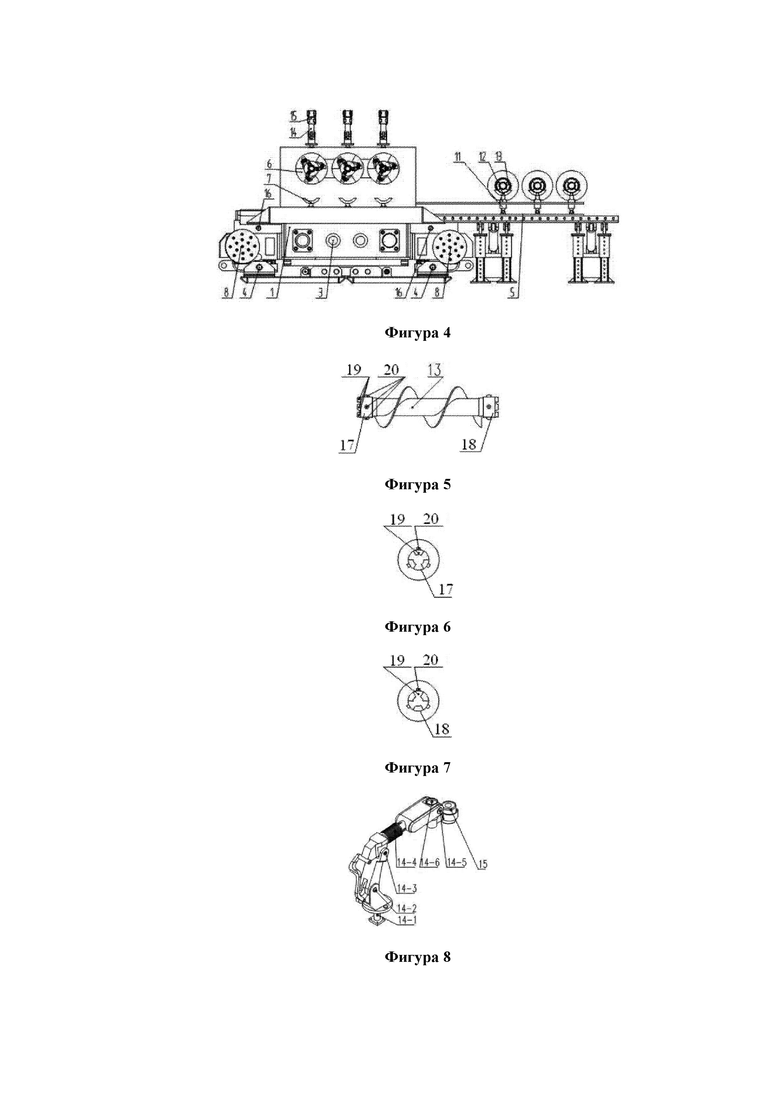
Фигура 4 – вид справа основного корпуса врубовой машины согласно настоящему изобретению;
Фигура 5 – конструктивная схема наращиваемой бурильной колонны согласно настоящему изобретению;
Фигура 6 – конструктивная схема первого соединительного устройства согласно настоящему изобретению;
Фигура 7 – конструктивная схема второго соединительного устройства согласно настоящему изобретению;
Фигура 8 – конструктивная схема телескопической руки-робота согласно настоящему изобретению;
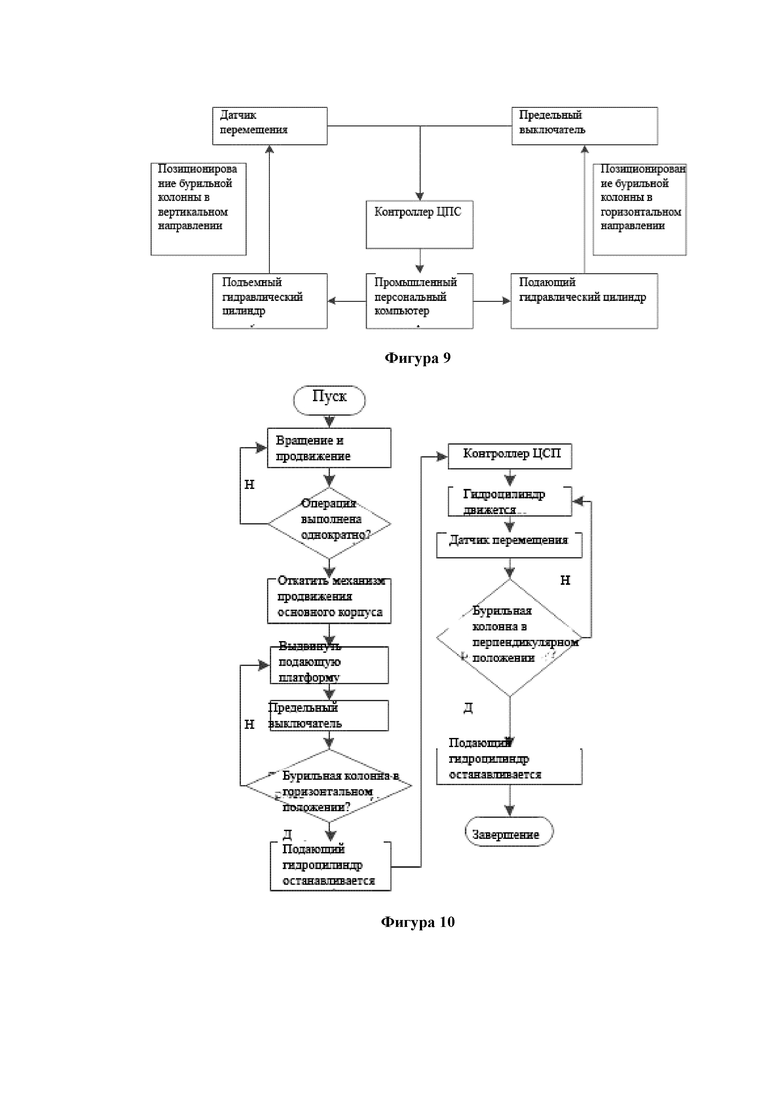
Фигура 9 – конструктивная блок-схема автоматической транспортной системы бурильной колонны согласно настоящему изобретению;
Фигура 10 – блок-схема управляющей логики автоматической транспортной системы бурильной колонны согласно настоящему изобретению;
Фигура 11 – конструктивная блок-схема автоматической системы присоединения бурильной колонны согласно настоящему изобретению;
Фигура 12 – блок-схема управляющей логики автоматической системы присоединения бурильной колонны согласно настоящему изобретению.
На чертежах: 1.рама буровой машины, 2. поворотная платформа бурильной колонны, 3. платформа для продвижения бурильной колонны, 4. подъемный механизм буровой машины, 5. подающая платформа бурильной колонны, 6. рабочая бурильная колонна, 7. опора рабочей бурильной колонны, 8. боковой опорный гидравлический цилиндр, 9. подающий гидравлический цилиндр бурильной колонны, 10.предельный выключатель, 11.подъемный гидравлический цилиндр, 12.датчик перемещения, 13. наращиваемая бурильная колонна, 14.телескопическая рука-робот, 15. бинокулярная камера ПЗС, 16.инфракрасный датчик, 17. первое соединительное устройство, 18. второе соединительное устройство, 19. трехкулачковый выпукло-вогнутый блок, 20.позиционирующий цилиндр, 2-1.поворотный двигатель, 2-2.подмоторный кронштейн, 14-1.первый серводвигатель, 14-2. второй серводвигатель, 14-3. третий серводвигатель, 14-4. четвертый серводвигатель, 14-5. пятый серводвигатель, 14-6. шестой серводвигатель.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Ниже приводится описание вариантов осуществления изобретения со ссылкой на чертежи.
На Фигуре 1, Фигуре 2, Фигуре 3 и Фигуре 4 показана автоматическая система управления врубовой машины на основе машинного зрения и взаимодействия датчиков, состоящая из основного корпуса врубовой машины, транспортной системы автоматической бурильной колонны и системы присоединения автоматической бурильной колонны, при этом,
Основной корпус врубовой машины включает в себя раму буровой машины 1, подъемный механизм буровой машины 4, поворотную платформу бурильной колонны 2, платформу для продвижения бурильной колонны 3, рабочую бурильную колонну 6 и опору рабочей бурильной колонны 7, при этом основной корпус врубовой машины способен перемещаться внутри своей выработки.
Рама буровой машины 1 горизонтально расположена на подъемном механизме буровой машины 4, который предназначен для создания опоры для рамы буровой машины 1 и регулировки ее высоты; боковой опорный механизм включает в себя две пары боковых опорных гидравлических цилиндров 8, при этом каждая пара боковых опорных гидравлических цилиндров 8 имеет опорный элемент, включающий в себя два телескопических конца; два опорных элемента расположены горизонтально перед рамой буровой машины 1 и за ней соответственно, обеспечивая тем самым поперечную опору и фиксацию рамы буровой машины 1; платформа для продвижения бурильной колонны 3 расположена на раме буровой машины 1, а поворотная платформа бурильной колонны 2 – на платформе для продвижения бурильной колонны 3; рабочая бурильная колонна 6 горизонтально подсоединена к поворотной платформе бурильной колонны 2 таким образом, что поворотная платформа 2 вращает рабочую бурильную колонну 6, а платформа для продвижения 3 приводит в движение поворотную платформу 2, в результате чего рабочая бурильная колонна 6 делает поперечную зарубку в стене выработки; опора рабочей бурильной колонны 7 расположена телескопически на раме буровой машины 1 и предназначена для фиксации рабочей бурильной колонны 6 при наращивании.
Автоматическая транспортная система бурильной колонны включает в себя подающий гидравлический цилиндр бурильной колонны 9, подающую платформу бурильной колонны 5, наращиваемую бурильную колонну 13, подъемный гидравлический цилиндр 11 и цифровой сигнальный процессор (ЦСП); подающая платформа бурильной колонны 5 расположена на дальней стороне рамы буровой машины 1 вдоль длины выработки, при этом подающая платформа 5 соединена с подающим гидравлическим цилиндром 9, который приводит подающую платформу 5 в движение, в результате чего она продвигается по выработке; наращиваемая бурильная колонна 13 горизонтально поперечно расположена на подающей платформе бурильной колонны 5 с помощью подъемного гидравлического цилиндра 11, а высота наращиваемой бурильной колонны 13 регулируется подъемным гидравлическим цилиндром 11; на опоре рабочей бурильной колонны 6 и подъемного гидравлического цилиндра 11 установлены датчики перемещения 12, а на раме буровой машины установлен предельный выключатель 10; и, как показано на Фигуре 9, датчики перемещения 12 и предельный выключатель 10 соединены с ЦСП, а соосность наращиваемой бурильной колонны 13 рабочей бурильной колонне 6 обеспечивается за счет регулирования положения с помощью датчиков перемещения 12 и предельного выключателя 10.
Автоматическая система присоединения бурильной колонны включает в себя телескопическую руку-робота 14 и бинокулярную камеру на приборах с зарядовой связью (ПЗС) 15, при этом телескопическая рука-робот 14 расположена на поворотной платформе бурильной колонны 2, а бинокулярная камера ПЗС 15 крепится к верхнему концу телескопической руки-робота 14, при этом автоматическое присоединение наращиваемой бурильной колонны 13 к рабочей 6 обеспечивается за счет визуального позиционирования.
В этом варианте осуществления изобретения основной корпус врубовой машины перемещается внутри выработки за счет использования гусеничного транспортного механизма, при этом в нижней части подъемного механизма буровой машины 4 имеются полозья, а рама буровой машины 1 опирается на гусеничные ленты транспортного механизма с помощью полозьев. На обоих концах левого и правого краев рамы буровой машины 1 имеется инфракрасный датчик 16.
В этом варианте осуществления изобретения на поворотной платформе бурильной колонны 2 имеется поворотный двигатель 2-1 и подмоторный кронштейн 2-2, с помощью которого поворотный двигатель 2-1 крепится к платформе для продвижения бурильной колонны 3.
Как показано на Фигуре 5, Фигуре 6 и Фигуре 7, на соединительном конце рабочей бурильной колонны 6 и на конце наращиваемой бурильной колонны 13, ближайшем к поворотному двигателю 2-1, имеется по первому соединительному устройству 19, а на выходном конце поворотного двигателя 2-1 и на конце наращиваемой бурильной колонны 13, ближайшем к рабочей бурильной колонне 6, имеется по второму соединительному устройству 18, при этом первое 19 и второе соединительные устройства 18 имеют цилиндрическую форму, а их внешние торцевые поверхности оснащены трехкулачковым выпукло-вогнутым блоком 19; противоположные трехкулачковые выпукло-вогнутые блоки 19 стыкуются друг с другом, а на цилиндрических поверхностях первого 19 и второго соединительных устройств 18 имеются по три позиционирующих цилиндра 20, распределенных через равные промежутки по окружности; центральная ось позиционирующего цилиндра 20 первого соединительного устройства 19 параллельна центральной оси выпуклого блока в составе трехкулачкового выпукло-вогнутого блока 19 первого соединительного устройства 19, центральная ось позиционирующего цилиндра 20 второго соединительного устройства 18 параллельна центральной оси выпуклого блока в составе трехкулачкового выпукло-вогнутого блока 19 второго соединительного устройства 18, а центральные оси позиционирующих цилиндров 20 с обоих концов наращиваемой бурильной колонны 13 параллельны друг другу.
Как показано на Фигуре 8, телескопическая рука-робот 14 установлена на подмоторном кронштейне 2-2, при этом телескопическая рука-робот 14 включает в себя первый серводвигатель 14-1, второй серводвигатель 14-2, третий серводвигатель 14-3, четвертый серводвигатель 14-4, пятый серводвигатель 14-5 и шестой серводвигатель 14-6; первый серводвигатель 14-1 обеспечивает вращение телескопической руки-робота 14 в горизонтальной плоскости, второй серводвигатель 14-2 и третий серводвигатель 14-3 поднимают и опускают телескопическую руку-робота 14, четвертый серводвигатель 14-4 вращает телескопическую руку-робота 14 по окружности, пятый серводвигатель 14-5 выдвигает и отодвигает телескопическую руку-робота 14, а шестой серводвигатель 14-6 вращает бинокулярную камеру ПЗС 15, которая крепится к телескопической руке-роботу 14.
Как показано на Фигуре 11, автоматическая система присоединения бурильной колонны также включает в себя карту захвата изображений, промышленный персональный компьютер, исполнительный программируемый логический контроллер (ПЛК) и электрогидравлический пропорциональный клапан; данные, полученные картой захвата изображений с бинокулярной камеры ПЗС 15, передаются на промышленный персональный компьютер для обработки, промышленный персональный компьютер посылает на исполнительный контроллер ПЛК сигнал об открытии электрогидравлического пропорционального клапана, в результате чего выполняется вращение поворотного двигателя 2-1 и, соответственно, стыковка между выходным концом поворотного двигателя 2-1 и наращиваемой бурильной колонны 13.
Автоматический способ управления врубовой машиной на основе машинного зрения и взаимодействия датчиков, который включает в себя следующие этапы:
Этап А: приведение основного корпуса врубовой машины в исходное рабочее положение внутри выработки с помощью гусеничного транспортного механизма, получение данных о расстоянии между врубовой машиной и окружающей выработкой в процессе движения с помощью инфракрасного датчика 16, установленного на раме буровой машины 1, и регулировка направления и скорости перемещения основного корпуса врубовой машины в режиме реального времени для управления проходом врубовой машины по длине выработки;
этап B: по приведению основного корпуса врубовой машины в рабочее положение регулировка высоты рамы буровой машины 1 под разработку угольных пластов различной толщины за счет подъемного механизма буровой машины 4; после подгонки рамы буровой машины 1 под высоту забоя поперечная фиксация основного корпуса врубовой машины с помощью бокового опорного механизма для ведения дальнейшей добычи; вращение рабочей бурильной колонны 6 с помощью поворотного двигателя 2-1, приведение в движение поворотной платформы 2 и рабочей бурильной колонны 6 с помощью платформы для продвижения бурильной колонны 3, выполнение поперечного реза в стенке выработки, выгрузка куска угля на конвейере;
этап C: после полного погружения рабочей бурильной колонны 6 в угольный пласт остановка поворотного двигателя 2-1, при этом опора рабочей бурильной колонны 7 поддерживает рабочую бурильную колонну 6 по восходящей траектории; отсоединение выходного конца поворотного двигателя 2-1 от рабочей бурильной колонны 6, приведение в движение поворотной платформы рабочей бурильной колонны 2 с помощью платформы для продвижения 3 и наращивание бурильной колонны 6;
этап D: Автоматическая подача наращиваемой бурильной колонны 13 и соосное позиционирование наращиваемой бурильной колонны 13 относительно рабочей бурильной колонны 6.
Как показано на Фигуре 10, опускание с помощью мостового крана наращиваемой бурильной колонны 13 на подъемный гидравлический цилиндр 11 и продвижение с помощью подающего гидравлического цилиндра 9 подающей платформы 5 с наращиваемой бурильной колонной 13 на раму буровой машины 1; после того, как подающая платформа 5 достигнет предельного выключателя 10, предельный выключатель 10 посылает сигнал на ЦСП, который, в свою очередь, обрабатывает сигнал и подает команду на подающий гидравлический цилиндр 9 об остановке подающей платформы 5 у предельного выключателя 10, что обеспечивает точное позиционирование наращиваемой бурильной колонны 13 в горизонтальном положении; регулировка высоты наращиваемой бурильной колонны 13 с помощью подъемного гидравлического цилиндра 11, управление с ЦСП подающим гидравлическим цилиндром 9 с учетом вертикальных позиционирующих координат рабочей бурильной колонны 6 с датчиков перемещения 12 на опоре рабочей бурильной колонны 7, регулировка высоты наращиваемой бурильной колонны 13 с учетом данных, полученных от датчика перемещения 12, для точного позиционирования наращиваемой бурильной колонны 13 в вертикальном направлении;
Этап E: Стыковка между наращиваемой бурильной колонной 13 и поворотным двигателем 2-1.
Как показано на Фигуре 12, после соосного позиционирования наращиваемой бурильной колонны 13 получение с помощью бинокулярной камеры ПЗС 15 серии изображений первого соединительного устройства 19 наращиваемой бурильной колонны 13, передача данных от карты захвата изображений на промышленный персональный компьютер для обработки, получение информации о расположении по периферии позиционирующего цилиндра 20 на первом соединительном устройстве 19 наращиваемой бурильной колонны 13, регулировка с помощью телескопической руки-робота 14 положения и угла бинокулярной камеры ПЗС 15 для помещения первого соединительного устройства 19 наращиваемой бурильной колонны 13 в центр изображения; по завершению настройки подача с промышленного персонального компьютера на исполнительный контроллер ПЛК сигнала об открытии электрогидравлического пропорционального клапана, который вращает поворотный двигатель 2-1, если положение по периферии позиционирующего цилиндра 20 на поворотном двигателе 2-1 согласно данным бинокулярной камеры ПЗС 15 соответствует положению по периферии для позиционирующего цилиндра 20 на первом соединительном устройстве 19 наращиваемой бурильной колонны 13, остановка поворотного двигателя 2-1 так, чтобы трехкулачковый выпукло-вогнутый блок 19 первого соединительного устройства 17 наращиваемой бурильной колонны 13 совместился по окружности с трехкулачковым выпукло-вогнутым блоком 19 второго соединительного устройства 13 на выходном конце поворотного двигателя 2-1 для точного позиционирования наращиваемой бурильной колонны 13 по окружности; подача с помощью платформы для продвижения бурильной колонны 3 узла наращиваемой бурильной колонны 13 и выходного конца поворотного двигателя 2-1 в сборе;
Этап F: Стыковка между наращиваемой бурильной колонной 13 и рабочей бурильной колонной 6.
По завершению стыковки наращиваемой бурильной колонны 13 и выходного конца поворотного двигателя 2-1 подача сигнала от промышленного персонального компьютера на исполнительный контроллер ПЛК для управления открыванием электрогидравлического пропорционального клапана так, чтобы вращать поворотный двигатель 2-1 под углом, противоположным углу, под которым выполнялось действие на этапе E, в исходное положение, которым в данном случае является центральная ось позиционирующего цилиндра 20 второго соединительного устройства 18 наращиваемой бурильной колонны 13, параллельная центральной оси позиционирующего цилиндра 20 рабочей бурильной колонны 6 для точного позиционирования наращиваемой бурильной колонны 13 по окружности относительно рабочей бурильной колонны 6; подача с помощью платформы для продвижения бурильной колонны 6 наращиваемой бурильной колонны 13 и завершение стыковки с рабочей бурильной колонной 6 для выполнения следующего цикла бурения и добычи.
В настоящем изобретении участок стыковки и примыкания трехкулачкового выпукло-вогнутого блока 19 обладает относительно большой площадью контактной поверхности и контактным расстоянием, а бурильная колонна отличается относительно небольшой длиной и высокой жесткостью, так, чтобы в процессе работы составные детали узла не разъединялись. Наличие соединительного устройства обеспечивает надлежащую плотность стыковки в процессе работы в зависимости от толкающей силы, развиваемой платформой для продвижения.
Вышеприведенное описание представляет собой предпочтительный вариант осуществления настоящего изобретения. Следует отметить, что специалист в состоянии вносить усовершенствования и модификации, не отходя от принципа настоящего изобретения. Любые подобные изменения и модификации подпадают в область патентной защиты настоящего изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| БУРОВЗРЫВНАЯ ПРОХОДЧЕСКАЯ МАШИНА | 2016 |
|
RU2673569C1 |
| ОБНАРУЖИВАЮЩАЯ, РОЮЩАЯ, ПОДДЕРЖИВАЮЩАЯ, АНКЕРУЮЩАЯ И ПЕРЕДАЮЩАЯ КОМПЛЕКСНАЯ МАШИННАЯ СИСТЕМА ДЛЯ БЫСТРОГО РЫТЬЯ СКВАЖИНЫ И СПОСОБ ЕЕ ПРИМЕНЕНИЯ | 2020 |
|
RU2748264C1 |
| ГОРНАЯ МАШИНА С МНОЖЕСТВОМ ВРУБОВЫХ ГОЛОВОК | 2017 |
|
RU2749518C2 |
| МАШИНА, НЕСУЩАЯ РЕЖУЩЕЕ ГОРНУЮ ПОРОДУ УСТРОЙСТВО | 2017 |
|
RU2753485C2 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ВЫСОТЫ АВТОМАТИЧЕСКОЙ ВРУБОВОЙ МАШИНЫ НА ОСНОВЕ ОПРЕДЕЛЕНИЯ СЕЙСМИЧЕСКИХ КОЛЕБАНИЙ ВРУБОВОЙ МАШИНЫ И СПОСОБ ТАКОГО РЕГУЛИРОВАНИЯ | 2018 |
|
RU2707218C1 |
| РОЮЩАЯ, ПОДДЕРЖИВАЮЩАЯ И АНКЕРУЮЩАЯ КОМПЛЕКСНАЯ МАШИННАЯ СИСТЕМА ДЛЯ БЫСТРОГО РЫТЬЯ СКВАЖИНЫ И СПОСОБ ЕЕ ПРИМЕНЕНИЯ | 2020 |
|
RU2748265C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АБСОЛЮТНОГО ПОЛОЖЕНИЯ УГЛЕДОБЫВАЮЩЕЙ МАШИНЫ | 2018 |
|
RU2711418C1 |
| УСТРОЙСТВО ДЛЯ ПОДВОДНОЙ ДОБЫЧИ И СПОСОБ ДОБЫЧИ МАТЕРИАЛА-ОСНОВЫ | 2017 |
|
RU2674492C1 |
| СПОСОБ И СИСТЕМА ДЛЯ НЕПРЕРЫВНОГО ПРОИЗВОДСТВА ОПТОВОЛОКОННОГО КАБЕЛЯ | 2019 |
|
RU2713202C1 |
| СТАНОК ДЛЯ КРЕПЛЕНИЯ БОЛТОВ КРОВЛИ ГОРНОПРОХОДЧЕСКОЙ МАШИНЫ | 2014 |
|
RU2643053C2 |


Изобретение раскрывает автоматическую систему управления врубовой машины и способ управления на основе машинного зрения и взаимодействия датчиков, состоящий из основного корпуса врубовой машины, автоматической транспортной системы бурильной колонны и автоматической системы присоединения бурильной колонны. Автоматическая транспортная система бурильной колонны за счет движения подающего гидравлического цилиндра толкает подающую платформу бурильной колонны, которая продвигается по выработке, при этом высота наращиваемой бурильной колонны на подающей платформе регулируется с помощью подъемного гидравлического цилиндра, а соосность наращиваемой бурильной колонны относительно рабочей обеспечивается за счет наличия датчика перемещения и предельного выключателя. Автоматическая система присоединения бурильной колонны регулирует положение и угол бинокулярной камеры на приборах с зарядовой связью с помощью телескопической руки-робота, регулирует расположение по периферии наращиваемой бурильной колонны с помощью поворотного двигателя и обеспечивает присоединение наращиваемой бурильной колонны к рабочей путем визуального позиционирования. Настоящее изобретение обладает относительно высоким уровнем интеграции и высокой степенью автоматизации, позволяет автоматически наращивать бурильную колонну и вести технологический процесс без присутствия оператора, а также увеличивает эффективность разработки месторождения угля за счет повышения надежности и сокращения эксплуатационных расходов. 2 н. и 8 з.п. ф-лы, 12 ил.
1. Автоматическая система управления врубовой машины на основе машинного зрения и взаимодействия датчиков, характеризующаяся тем, что она состоит из основного корпуса врубовой машины, транспортной системы автоматической бурильной колонны и системы присоединения автоматической бурильной колонны, при этом
основной корпус врубовой машины включает в себя раму буровой машины (1), подъемный механизм буровой машины (4), поворотную платформу бурильной колонны (2), платформу для продвижения бурильной колонны (3), рабочую бурильную колонну (6) и опору рабочей бурильной колонны (7), при этом основной корпус врубовой машины способен перемещаться внутри своей выработки;
рама буровой машины (1) горизонтально расположена на подъемном механизме буровой машины (4), который предназначен для создания опоры для рамы буровой машины (1) и регулировки ее высоты; боковой опорный механизм включает в себя две пары боковых опорных гидравлических цилиндров (8), при этом каждая пара боковых опорных гидравлических цилиндров (8) имеет опорный элемент, включающий в себя два телескопических конца; два опорных элемента расположены горизонтально перед рамой буровой машины (1) и за ней соответственно, обеспечивая тем самым поперечную опору и фиксацию рамы буровой машины (1); платформа для продвижения бурильной колонны (3) расположена на раме буровой машины (1), а поворотная платформа бурильной колонны (2) - на платформе для продвижения бурильной колонны (3); рабочая бурильная колонна (6) горизонтально подсоединена к поворотной платформе бурильной колонны (2) таким образом, что поворотная платформа (2) вращает рабочую бурильную колонну (6), а платформа для продвижения (3) приводит в движение поворотную платформу (2), в результате чего рабочая бурильная колонна (6) делает поперечную зарубку в стене выработки; опора рабочей бурильной колонны (7) расположена телескопически на раме буровой машины (1) и предназначена для фиксации рабочей бурильной колонны (6) при наращивании;
автоматическая транспортная система бурильной колонны включает в себя подающий гидравлический цилиндр бурильной колонны (9), подающую платформу бурильной колонны (5), наращиваемую бурильную колонну (13), подъемный гидравлический цилиндр (11) и цифровой сигнальный процессор (ЦСП); подающая платформа бурильной колонны (5) расположена перед рамой буровой машины (1) или за ней вдоль длины выработки, при этом подающая платформа (5) соединена с подающим гидравлическим цилиндром (9), который приводит подающую платформу (5) в движение, в результате чего она продвигается по выработке; наращиваемая бурильная колонна (13) горизонтально поперечно расположена на подающей платформе бурильной колонны (5) с помощью подъемного гидравлического цилиндра (11), а высота наращиваемой бурильной колонны (13) регулируется подъемным гидравлическим цилиндром (11); на опоре рабочей бурильной колонны (7) и подъемного гидравлического цилиндра (11) установлены датчики перемещения (12), а на раме буровой машины установлен предельный выключатель (10); датчики перемещения (12) и предельный выключатель (10) соединены с ЦСП, а соосность наращиваемой бурильной колонны (13) рабочей бурильной колонне (6) обеспечивается за счет регулирования положения с помощью датчиков перемещения (12) и предельного выключателя (10);
автоматическая система присоединения бурильной колонны включает в себя телескопическую руку-робота (14) и бинокулярную камеру на приборах с зарядовой связью (ПЗС) (15), при этом телескопическая рука-робот (14) расположена на поворотной платформе бурильной колонны (2), а бинокулярная камера ПЗС (15) крепится к верхнему концу телескопической руки-робота (14); при этом автоматическое присоединение наращиваемой бурильной колонны (13) к рабочей (6) обеспечивается за счет визуального позиционирования.
2. Автоматическая система по п. 1, отличающаяся тем, что основной корпус врубовой машины перемещается внутри выработки за счет использования гусеничного транспортного механизма, при этом в нижней части подъемного механизма буровой машины (4) имеются полозья, а рама буровой машины (1) опирается на гусеничные ленты транспортного механизма с помощью полозьев.
3. Автоматическая система по п. 1, отличающаяся тем, что на обоих концах левого и правого краев рамы буровой машины (1) имеется инфракрасный датчик (16).
4. Автоматическая система по п. 1, отличающаяся тем, что на поворотной платформе бурильной колонны (2) имеется поворотный двигатель (2-1) и подмоторный кронштейн (2-2), с помощью которого поворотный двигатель (2-1) крепится к платформе для продвижения бурильной колонны (3).
5. Автоматическая система по п. 4, отличающаяся тем, что количество поворотных двигателей (2-1) соответствует количеству рабочих бурильных колонн (6), а количество телескопических рук-роботов (14) соответствует количеству поворотных двигателей (2-1).
6. Автоматическая система по п. 4, отличающаяся тем, что на соединительном конце рабочей бурильной колонны (6) и на конце наращиваемой бурильной колонны (13), ближайшем к поворотному двигателю (2-1), имеется по первому соединительному устройству (17), а на выходном конце поворотного двигателя (2-1) и на конце наращиваемой бурильной колонны (13), ближайшем к рабочей бурильной колонне (6), имеется по второму соединительному устройству (18), при этом первое (17) и второе соединительные устройства (18) имеют цилиндрическую форму, а их внешние торцевые поверхности оснащены трехкулачковым выпукло-вогнутым блоком (19); противоположные трехкулачковые выпукло-вогнутые блоки (19) стыкуются друг с другом, а на цилиндрических поверхностях первого (17) и второго соединительных устройств (18) имеются по три позиционирующих цилиндра (20), распределенных через равные промежутки по окружности; центральная ось позиционирующего цилиндра (20) первого соединительного устройства (17) параллельна центральной оси выпуклого блока в составе трехкулачкового выпукло-вогнутого блока (19) первого соединительного устройства (17), центральная ось позиционирующего цилиндра (20) второго соединительного устройства (18) параллельна центральной оси выпуклого блока в составе трехкулачкового выпукло-вогнутого блока (19) второго соединительного устройства (18), а центральные оси позиционирующих цилиндров (20) с обоих концов наращиваемой бурильной колонны (13) параллельны друг другу.
7. Автоматическая система по п. 4, отличающаяся тем, что телескопическая рука-робот (14) установлена на подмоторном кронштейне (2-2), при этом телескопическая рука-робот (14) включает в себя первый серводвигатель (14-1), второй серводвигатель (14-2), третий серводвигатель (14-3), четвертый серводвигатель (14-4), пятый серводвигатель (14-5) и шестой серводвигатель (14-6); первый серводвигатель (14-1) обеспечивает вращение телескопической руки-робота (14) в горизонтальной плоскости, второй серводвигатель (14-2) и третий серводвигатель (14-3) поднимают и опускают телескопическую руку-робота (14), четвертый серводвигатель (14-4) вращает телескопическую руку-робота (14) по окружности, пятый серводвигатель (14-5) выдвигает и отодвигает телескопическую руку-робота (14), а шестой серводвигатель (14-6) вращает бинокулярную камеру ПЗС (15), которая крепится к телескопической руке-роботу (14).
8. Автоматическая система по п. 1, отличающаяся тем, что бинокулярная камера ПЗС (15) имеет функцию мигания.
9. Автоматическая система по п. 4, отличающаяся тем, что автоматическая система присоединения бурильной колонны также включает в себя карту захвата изображений, промышленный персональный компьютер, исполнительный программируемый логический контроллер (ПЛК) и электрогидравлический пропорциональный клапан; данные, полученные картой захвата изображений с бинокулярной камеры ПЗС (15), передаются на промышленный персональный компьютер для обработки, промышленный персональный компьютер посылает на исполнительный контроллер ПЛК сигнал об открытии электрогидравлического пропорционального клапана, в результате чего выполняется вращение поворотного двигателя (2-1) и, соответственно, стыковка между выходным концом поворотного двигателя (2-1) и наращиваемой бурильной колонны (13).
10. Автоматический способ управления врубовой машиной на основе машинного зрения и взаимодействия датчиков, который включает в себя следующие этапы:
этап А: приведение основного корпуса врубовой машины в исходное рабочее положение внутри выработки с помощью гусеничного транспортного механизма, получение данных о расстоянии между врубовой машиной и окружающей выработкой в процессе движения с помощью инфракрасного датчика (16), установленного на раме буровой машины (1), и регулировка направления и скорости перемещения основного корпуса врубовой машины в режиме реального времени для управления проходом врубовой машины по длине выработки;
этап В: по приведению основного корпуса врубовой машины в рабочее положение регулировка высоты рамы буровой машины (1) под разработку угольных пластов различной толщины за счет подъемного механизма буровой машины (4); после подгонки рамы буровой машины (1) под высоту забоя поперечная фиксация основного корпуса врубовой машины с помощью бокового опорного механизма для ведения дальнейшей добычи; вращение рабочей бурильной колонны (6) с помощью поворотного двигателя (2-1), приведение в движение поворотной платформы (2) и рабочей бурильной колонны (6) с помощью платформы для продвижения бурильной колонны (3), выполнение поперечного реза в стенке выработки, выгрузка куска угля на конвейере;
этап С: после полного погружения рабочей бурильной колонны (6) в угольный пласт остановка поворотного двигателя (2-1), при этом опора рабочей бурильной колонны (7) поддерживает рабочую бурильную колонну (6) по восходящей траектории; отсоединение выходного конца поворотного двигателя (2-1) от рабочей бурильной колонны (6), приведение в движение поворотной платформы рабочей бурильной колонны (2) с помощью платформы для продвижения (3) и наращивание бурильной колонны (6);
этап D: опускание с помощью мостового крана наращиваемой бурильной колонны (13) на подъемный гидравлический цилиндр (11) и продвижение с помощью подающего гидравлического цилиндра (9) подающей платформы (5) с наращиваемой бурильной колонной (13) на раму буровой машины (1); после того как подающая платформа (5) достигнет предельного выключателя (10), предельный выключатель (10) посылает сигнал на ЦСП, который, в свою очередь, обрабатывает сигнал и подает команду на подающий гидравлический цилиндр (9) об остановке подающей платформы (5) у предельного выключателя (10), что обеспечивает точное позиционирование наращиваемой бурильной колонны (13) в горизонтальном положении; регулировка высоты наращиваемой бурильной колонны (13) с помощью подъемного гидравлического цилиндра (11), управление с ЦСП подающим гидравлическим цилиндром (9) с учетом вертикальных позиционирующих координат рабочей бурильной колонны (6) с датчиков перемещения (12) на опоре рабочей бурильной колонны (7), регулировка высоты наращиваемой бурильной колонны (13) с учетом данных, полученных от датчика перемещения (12), для точного позиционирования наращиваемой бурильной колонны (13) в вертикальном направлении;
этап Е: после соосного позиционирования наращиваемой бурильной колонны (13) получение с помощью бинокулярной камеры ПЗС (15) серии изображений первого соединительного устройства (17) наращиваемой бурильной колонны (13), передача данных от карты захвата изображений на промышленный персональный компьютер для обработки, получение информации о расположении по периферии позиционирующего цилиндра (20) на первом соединительном устройстве (17) наращиваемой бурильной колонны (13), регулировка с помощью телескопической руки-робота (14) положения и угла бинокулярной камеры ПЗС (15) для помещения первого соединительного устройства (17) наращиваемой бурильной колонны (13) в центр изображения; по завершении настройки подача с промышленного персонального компьютера на исполнительный контроллер ПЛК сигнала об открытии электрогидравлического пропорционального клапана, который вращает поворотный двигатель (2-1), если положение по периферии позиционирующего цилиндра (20) на поворотном двигателе (2-1) согласно данным бинокулярной камеры ПЗС (15) соответствует положению по периферии для позиционирующего цилиндра (20) на первом соединительном устройстве (17) наращиваемой бурильной колонны (13), остановка поворотного двигателя (2-1) так, чтобы трехкулачковый выпукло-вогнутый блок (19) первого соединительного устройства (17) наращиваемой бурильной колонны (13) совместился по окружности с трехкулачковым выпукло-вогнутым блоком (19) второго соединительного устройства (18) на выходном конце поворотного двигателя (2-1) для точного позиционирования наращиваемой бурильной колонны (13) по окружности; подача с помощью платформы для продвижения бурильной колонны (5) узла наращиваемой бурильной колонны (13) и выходного конца поворотного двигателя (2-1) в сборе;
этап F: по завершении стыковки наращиваемой бурильной колонны (13) и выходного конца поворотного двигателя (2-1) подача сигнала от промышленного персонального компьютера на исполнительный контроллер ПЛК для управления открыванием электрогидравлического пропорционального клапана так, чтобы вращать поворотный двигатель (2-1) под углом, противоположным углу, под которым выполнялось действие на этапе Е, в исходное положение, которым в данном случае является центральная ось позиционирующего цилиндра (20) второго соединительного устройства (18) наращиваемой бурильной колонны (13), параллельная центральной оси позиционирующего цилиндра (20) рабочей бурильной колонны (6) для точного позиционирования наращиваемой бурильной колонны (13) по окружности относительно рабочей бурильной колонны (6); подача с помощью платформы для продвижения бурильной колонны (5) наращиваемой бурильной колонны (13) и завершение стыковки с рабочей бурильной колонной (6) для выполнения следующего цикла бурения и добычи.
| CN 103470255 A, 25.12.2013 | |||
| СПОСОБ ИСПОЛЬЗОВАНИЯ ДАТЧИКА ПОЛОЖЕНИЯ ТОРЦА БУРИЛЬНОГО ИНСТРУМЕНТА | 2008 |
|
RU2471066C2 |
| МЕХАНИЗМ ФИКСАЦИИ И ЦЕНТРИРОВАНИЯ ПРИ СВИНЧИВАНИИ И РАЗВИНЧИВАНИИ БУРИЛЬНЫХ ТРУБ ДЛЯ УСТАНОВКИ ГОРИЗОНТАЛЬНОГО БУРЕНИЯ | 2007 |
|
RU2378485C2 |
| WO 2000065193 A1, 02.11.2000 | |||
| Стекловаренная ванная печь | 1986 |
|
SU1359257A1 |
| CN 104100213 A, 15.10.2014 | |||
| CN 105178853 A, 23.12.2015. | |||

