Область техники, к которой относится изобретение
Изобретение относится к управлению пассажирской подвесной канатной дорогой с отцепляемым зажимом, а именно система осуществляет расчет и формирования управляющих воздействий на исполнительные механизмы пассажирской подвесной канатной дороги (далее - ППКД), сохраняет безопасное состояние ППКД в зависимости от данных о состоянии поступающих с датчиков и режима работы, заданного оператором.
Уровень техники
Из уровня техники известна система обнаружения опасностей на подвесной канатной дороге, включающая в себя радиолокационный сенсорный блок, установленный на участке вдоль канатной дороги, который генерирует радиолокационные данные, представляющие заранее определенные условия на канатной дороге, вблизи радиолокационного сенсорного блока, и процессор, который анализирует данные от радиолокационного сенсорного блока для обнаружения заранее определенных опасных условий и генерирует сигнал обнаружения опасности, указывающий на это. Способ выполнения функции безопасности подвесной канатной дороги включает использование радара для обнаружения опасного состояния и генерирование сигнала обнаружения опасности в ответ на него; генерирование управляющего сигнала в ответ на сигнал обнаружения опасности и инициируют безопасность с помощью управляющего сигнала (US 2021229713 A1, опубл. 29.07.2021).
Раскрытие сущности изобретения
Система циклически обрабатывает аналоговые и дискретные значения, поступающие с датчиков, установленных на узлах и устройствах пассажирской канатной дороги, а также сигналы с кнопок и переключателей на пультах управления на модули ввода сигналов, в результате арифметических и логических операций в программе программируемого логического контроллера (далее - ПЛК) формируются выходные значения на модули вывода задающие состояния исполнительных устройств, таких как реле, клапаны, электродвигатели. Также формируются информационные сообщения для системы сигнализации.
Технический результат заявленного изобретения заключается в обеспечении непрерывного контроля и коррекции положения подвесок (подвижного состава) на канате и станции пассажирской подвесной канатной дороги.
Технический результат обеспечивается автоматизированной системой управления пассажирской подвесной канатной дорогой, содержащей блок контроля безопасности и датчики контроля положения каната, установленные на опорах и станциях канатной дороги, датчики, определяющие позицию кабины, расположенные на станциях пассажирской подвесной канатной дороги, концевые датчики, расположенные вдоль траектории движения кабины на станциях, датчики конечного положения дверей кабины и индукционные датчики контроля усилия зажима кабины, датчики контроля работоспособности электромеханических и гидравлических устройств, расположенные на этих устройствах, датчики скорости движения кабины, концевые выключатели, расположенные обводных станциях, при этом аналоговые и дискретные значения от вышеперечисленных датчиков циклически поступают на модули дискретного и аналогового ввода двух работающих в паре программируемых логических контроллера, которые обмениваются информацией о безопасности и режиме работы пассажирской подвесной канатной дороги между собой посредством ETHERNET и управляют приводной и обводной станциями пассажирской подвесной канатной дороги соответственно, формируя выходные значения на модули дискретного и аналогового вывода, задающие состояния исполнительных устройств, таких как реле, клапаны, электродвигатели и формируют сообщения о работе пассажирской подвесной канатной дороги для системы сигнализации.
В частных случаях реализации датчики контроля работоспособности электромеханических и гидравлических устройств, представляют собой датчики контроля уровня жидкости и гидравлические датчики давления жидкости.
Автоматизированная система управления пассажирской подвесной канатной дорогой дополнительно содержит индуктивный датчик для бесконтактного определения положения зажима кабины.
В качестве датчика скорости движения используется энкодер, который расположен на шкиве тягового каната.
Краткое описание чертежей
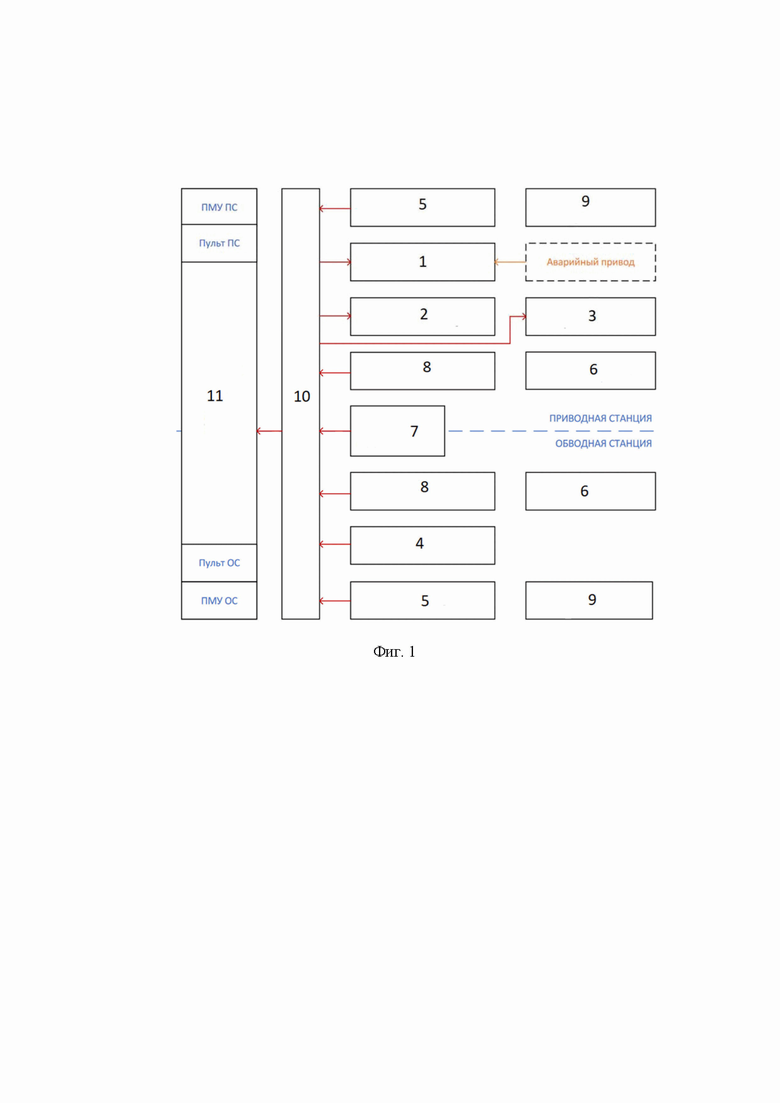
На фиг. 1 представлена схема взаимодействия подсистем автоматизированной системы управления пассажирской подвесной канатной дороги, где:
1 - главный привод
2 - рабочий тормоз
3 - аварийный тормоз
4 - устройство натяжения каната
5 - антиколлизионная система
6 - система парковки
7 - контроль положения каната
8 - контроль кабины
9 - ветроизмерительная установка
10 - контроль безопасности
11 - система сигнализации и управления и система человеко-машинного интерфейса
Осуществление изобретения
В заявленной автоматизированной системе управления пассажирской подвесной канатной дорогой используются следующие датчики: контроля положения каната, установленные на опорах и станциях канатной дороги; определяющие позицию кабины, расположенные на станциях канатной дороги (КД); контроля работоспособности электромеханических и гидравлических устройств, таких как основного электродвигателя, электродвигателей гидравлических устройств: контроля работоспособности гидравлической установки натяжения каната, гидравлической установкой рабочего тормоза и аварийного тормоза, расположенные на этих устройства; конечного положения дверей кабины; контроля усилия зажима кабины, расположенные на участке сцепки расцепки, в месте где зажим захватывает канат; скорости движения кабины.
Автоматизированная система управления работает в следующих режимах:
- с операторами на обеих станциях
- без оператора на приводной станции
- без оператора на обводной станции
Режим работы с операторами на обеих станциях: Режим работы с главным приводом является основным режимом работы и допускает эксплуатацию канатной дороги с пассажирами. При эксплуатации ППКД с пассажирами необходимо присутствие обслуживающего персонала на обеих (приводной и обводной) станциях канатной дороги. Данный режим позволяет работу на главном приводе с максимально возможной скоростью движения 6 м/с.
Режим работы без оператора на приводной станции:
Данный режим может применяться для технического обслуживания, запуска и остановки в начале и в конце смены. Перевозка пассажиров в данном режиме работы запрещена. Ключи выбора режимов работы на ПС и ОС должны быть в положении «ПС без персонала». Управление ППКД происходит с ОС. При выборе этого режима происходит автоматическое включение освещения на трассе канатной дороги и перроне приводной станции.
Важно! В данном режиме работы деактивированы следующие функции безопасности:
■ Контроль проезда подвесок по станции, минимум на въезде и выезде
■ Контроль логических цепей на выезде
■ Контроль стрелки на станции
■ Контроль зоны посадки
Без оператора на обводной станции:
Данный режим может применяться для технического обслуживания, запуска и остановки в начале и конце смены. Перевозка пассажиров в данном режиме работы запрещена. Переключатели выбора режимов работы на ПС и ОС должны быть в положении «ОС без персонала». Управление канатной дороги происходит с ПС. При выборе этого режима происходит автоматическое включение освещения на трассе канатной дороги и перроне обводной станции.
Важно! В данном режиме работы деактивированы следующие функции безопасности:
■ контроль проезда подвесок по станции, минимум на въезде и выезде;
■ контроль логических цепей на выезде;
■ контроль стрелки на станции;
■ контроль зоны посадки;
Система циклически обрабатывает аналоговые и дискретные значения, поступающие со всех датчиков, установленных на узлах пассажирской подвесной канатной дороги, кнопок и переключателей на пультах управления на модули ввода сигналов, в результате арифметических и логических операций в программе программируемого логического контроллера (ПЛК) формируются выходные значения на модули вывода задающие состояния исполнительных устройств, таких как реле, клапана, электродвигатели. Также формируются информационные сообщения для системы сигнализации.
Программа разделена на следующие блоки для управления подсистемами:
1. Главный привод
2. Рабочий тормоз, аварийный тормоз
3. Устройство натяжения
4. Антиколлизионная система
5. Система парковки
6. Контроль положения каната
7. Контроль кабины
8. Ветроизмерительная установка
9. Контроль безопасности
10. Система сигнализации и управления
Аппаратная часть состоит из датчиков, установленных на узлах и устройствах ППКД и двух программируемых логических контроллеров с набором модулей дискретного ввода\вывода по напряжению 0-24В и аналогового ввода\вывода 0-10В и 4-20мА, выполняющих функции аналогово-цифрового преобразователя (далее - АЦП) и цифрового-аналогово преобразователя (далее - ЦАП). ПЛК работают в паре, обмениваются информацией о безопасности и режиме работы между собой посредством ETHERNET и управляют приводной и обводной станциями ППКД соответственно.
Датчик скорости движения кабины, необходим для контроля скорости движения кабины, в качестве датчика скорости движения используется энкодер, расположенный на шкиве тягового каната.
Концевые датчики, расположенных вдоль траектории движения кабины на станциях, необходимые для контроля безопасности положения кабины на станции и взаимного расположения кабин.
Датчики конечного положения дверей кабины установлены на станции, при прохождении зоны закрытия двери, датчики контролируют их закрытие. Геометрия положения исполнительных устройств закрытия дверей кабины должна совпасть с положением на станции датчиков, контролирующих эту геометрию. Исполнительные устройства закрытия дверей кабины расположены на кабине.
Пассажирская подвесная канатная дорога оснащена датчиками положения и усилия зажима кабины.
Индуктивный датчик - предназначен для бесконтактного определения положения объектов из металла. Индуктивные датчики установлены на протяжении всей станции, объектом из металла является зажим кабины (он же - кабина, так как, проходя по станции, это всё единый элемент).
В индуктивном датчике - происходит запасание энергии магнитного поля. Тем самым происходит передача сигнала 1 и 0 в контроллер.
При измерении усилия зажима используются индукционные датчики. В индукционном датчике - измеряется характеристика магнитного поля, тем самым измеряя эту характеристику получают значения измерения усилия зажима.
Автоматизированная система управления пассажирской подвесной канатной дорогой содержит датчики контроля работоспособности электромеханических и гидравлических устройств, а именно датчики контроля уровня жидкости и гидравлические датчики давления.
Датчики контроля уровня жидкости - сигнализируют об уровне жидкости в редукторе или в гидравлических баках системы натяжения и тормозной системы, датчик температуры в жидкостных системах преобразует температуру в цифровой сигнал для передачи данных на вход аналогового модуля ПЛК.
Датчики контроля уровня жидкости - установлены в самом редукторе главного привода, и в баке устройства натяжения и тормозов.
Гидравлические датчики давления жидкости - преобразуют давление жидкости в цифровой сигнал на вход аналогового модуля ПЛК. Гидравлические датчики системы натяжения установлены на гидравлических цилиндрах.
Гидравлические датчики тормозной системы установлены в контуре рабочего тормоза и в контуре аварийного тормоза, гидравлики тормозной системы.
Концевой выключатель - отвечает за положение узла, и коммутирует через себя напряжение 24 вольта от модуля ввода вывода ПЛК.
Автоматизированная система управления пассажирской подвесной канатной дорогой содержит автоматические выключатели, установленные внутри шкафа управления. Посредством дополнительных контактов автоматических выключателей модуль ввода вывода ПЛК производит контроль положения автоматического выключателя.
Автоматизированная система управления пассажирской подвесной канатной дорогой работает следующим образом.
Автоматизированная система управления пассажирской подвесной канатной дороги циклически производит следующую последовательность действий после подачи питания и первоначальной загрузки:
1. Опрос сигналов логическим контроллером на модулях ввода;
2. Оценка состояния системы на безопасность в блоке контроль безопасности (часть программного обеспечения ПЛК), который проверяет наличие и производит оценку опасных событий и формирует команду соответствующего останова канатной дороги;
2.1 Оценка безопасности состояния кабины на станции, посредством датчиков конечного положения двери и индукционных датчиков контроля усилия зажима, сигналы с которых поступают на отказобезопасные модули дискретных и аналоговых входов, данные обрабатываются отказобезопасными программируемыми логическими контролерами;
2.2 Оценка безопасности положения кабины на станции посредством концевых датчиков, расположенных вдоль траектории движения кабины на станциях. Сигналы поступают на отказобезопасные модули дискретного ввода. Анализируя время поступления сигналов с датчиков в отказобезопасной части программы, ПЛК рассчитывается взаимное расположение кабин и делается заключение о соблюдении безопасной дистанции между кабинами;
2.3 Оценка безопасности состояния системы натяжения посредством датчиков контроля работоспособности электромеханических и гидравлических устройств;
2.4 Оценка безопасности положения каната;
2.5 Оценка безопасности параметров движения;
Оценка безопасности параметров движения осуществляется посредством тахогенератора шкива и тахогенератора двигателя. Тахогенератор шкива установлен на шкиве, тахогенератор двигателя установлен в двигателе.
4. Оценка показаний от системы ветроизмерения. Ветроизмерительная установка является частью автоматизированной системы. Датчиком ветроизмерительной установки является анемометр и румбометр, которые установлены на опоре.
5. Управление стрелками системы парковки
Система парковки предназначена для снятия подвижного состава с каната. При наличии соответствующей команды оператора происходит переключение стрелки из положения движения по кольцу в положения движения в парковку.
6. Оценка команд от системы сигнализации и управления;
7. Формирование управляющих сигналов в блоках управления рабочим и аварийным тормозом.
Система натяжения обеспечивает требуемое значение натяжения каната за счёт постоянного контроля давления в гидроцилиндре натяжения, расположенном на обводной станции, и положения натяжной тележки с помощью концевых выключателей. При выходе значения давления из рабочего диапазона, либо срабатывании концевых выключателей положения тележки выдаётся аварийный сигнал и КД останавливается.
Положение каната контролируется с помощью ломающихся проводников, расположенных на опорах КД и концевых выключателях на станциях. В случае схода каната с направляющих роликов происходит срабатывание указанных датчиков и КД останавливается.
Основным параметром движения являются скорость и ускорение/замедление каната. Расчёт параметров ведётся на основании показаний датчика скорости. При несоответствии текущих значений параметров заданным происходит остановка КД.
Измерение скорости ветра производится с помощью анемометра. При превышении заданного порога происходит автоматическое снижение скорости движения КД.
8. Формирование управляющих сигналов в блоке управления приводом;
9. Подача информационных сигналов в систему сигнализации и управления;
10. Подача сформированных выше управляющих сигналов и значений на модули вывода.
При успешном прохождении всех проверок безопасности на привод подаётся сигнал о готовности к запуску. После получения команды оператора на запуск система управления выдаёт в привод сигнал на запуск и аналоговый сигнал со значением задания на скорость перемещения каната. В ходе работы задание на скорость может изменяться по командам оператора КД. В случае подачи команды остановки происходит плавное уменьшение задания скорости, при достижении минимальной скорости близкой к нулю отключается сигнал на запуск двигателя.
Сигналы о текущем состоянии механизмов и систем отображаются с помощью световой индикации на шкафах и пультах управления, расположенных на станциях КД. В дополнение к световой используется два вида звуковой сигнализации - для дополнительного привлечения внимания персонала.
Отказобезопасные модули вывода в рабочем режиме передают в электрическую схему сигналы, сформированные программой ПЛК.
В аварийных случаях, например, при сбое ПЛК, выходные модули устанавливают свои выходы в состояние, переводящее электрическую схему системы в безопасное состояние.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОДВЕСНАЯ КАНАТНАЯ ДОРОГА С МЕХАТРОННЫМИ ДВИЖИТЕЛЯМИ | 2012 |
|
RU2507095C1 |
| СИСТЕМА КОНТРОЛЯ БЕЗОПАСНОСТИ КАНАТНОЙ ДОРОГИ | 1995 |
|
RU2163204C2 |
| ГОРОДСКАЯ КАНАТНАЯ ДОРОГА | 2010 |
|
RU2412840C1 |
| Комплексная грузо-пассажирская переправа через водоток с приводом от водяного колеса | 2019 |
|
RU2713312C1 |
| ГОРОДСКАЯ КАНАТНАЯ ДОРОГА | 2011 |
|
RU2466889C1 |
| УСТРОЙСТВО РЕГУЛИРОВАНИЯ ПОСАДКИ НА КАНАТНУЮ ТРАНСПОРТНУЮ УСТАНОВКУ | 2019 |
|
RU2789928C2 |
| СПЕЦИАЛИЗИРОВАННОЕ НАДЗЕМНОЕ СРЕДСТВО ОБЩЕСТВЕННОГО ТРАНСПОРТА | 2014 |
|
RU2682122C2 |
| Система управления гидравлическими приводами двух штанговых глубинных насосов | 2023 |
|
RU2806837C1 |
| ГОРОДСКАЯ КАНАТНАЯ ДОРОГА | 2008 |
|
RU2381931C1 |
| СИСТЕМА ЦЕНТРАЛИЗОВАННОГО УПРАВЛЕНИЯ АВТОМАТИЧЕСКИМ НАКОПЛЕНИЕМ И РАСПРЕДЕЛЕНИЕМ ПОДВЕСНЫХ СИДЕНИЙ ПОДВЕСНОГО УСТРОЙСТВА ДЛЯ ПОСАДКИ ПАССАЖИРОВ | 2019 |
|
RU2719057C1 |
Изобретение относится к управлению пассажирской подвесной канатной дорогой с отцепляемым зажимом, а именно: система осуществляет расчет и формирование управляющих воздействий на исполнительные механизмы пассажирской подвесной канатной дороги (далее - ППКД), сохраняет безопасное состояние ППКД в зависимости от данных о состоянии, поступающих с датчиков, и режима работы, заданного оператором. Автоматизированная система управления пассажирской подвесной канатной дорогой содержит блок контроля безопасности и датчики контроля положения каната, установленные на опорах и станциях канатной дороги, датчики, определяющие позицию кабины, расположенные на станциях пассажирской подвесной канатной дороги, концевые датчики, расположенные вдоль траектории движения кабины на станциях, датчики конечного положения дверей кабины и индукционные датчики контроля усилия зажима кабины, датчики контроля работоспособности электромеханических и гидравлических устройств, расположенные на этих устройствах, датчики скорости движения кабины, концевые выключатели, расположенные на обводных станциях, при этом аналоговые и дискретные значения от вышеперечисленных датчиков циклически поступают на модули дискретного и аналогового ввода двух работающих в паре программируемых логических контроллеров, которые обмениваются информацией о безопасности и режиме работы пассажирской подвесной канатной дороги между собой посредством ETHERNET и управляют приводной и обводной станциями пассажирской подвесной канатной дороги соответственно, формируя выходные значения на модули дискретного и аналогового вывода, задающие состояния исполнительных устройств, таких как реле, клапаны, электродвигатели, и формируют сообщения о работе пассажирской подвесной канатной дороги для системы сигнализации. Технический результат - обеспечение непрерывного контроля и коррекции положения подвесок на канате и станции пассажирской подвесной канатной дороги. 4 з.п. ф-лы, 1 ил.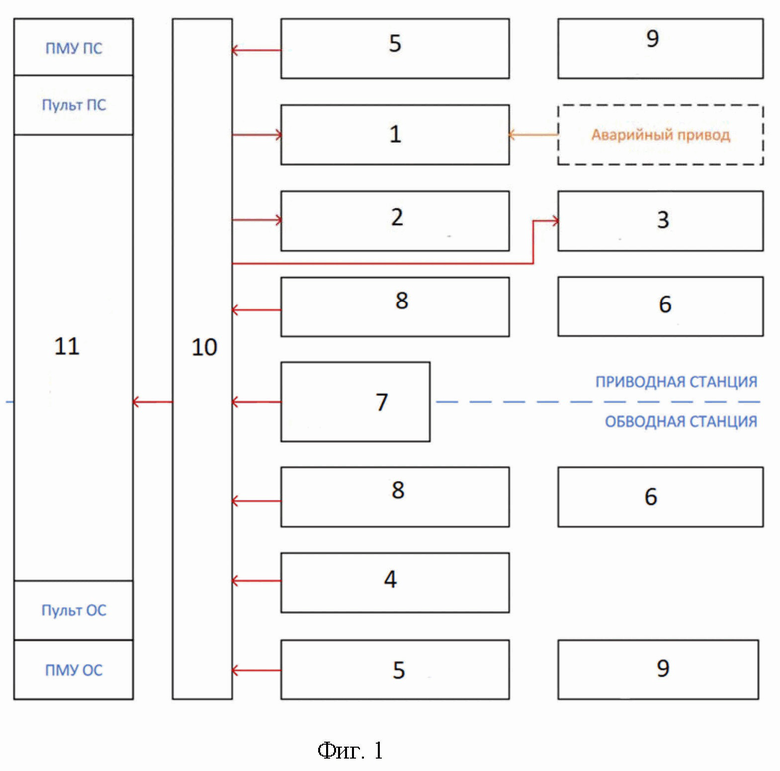
1. Автоматизированная система управления пассажирской подвесной канатной дорогой, содержащая блок контроля безопасности и датчики контроля положения каната, установленные на опорах и станциях канатной дороги, датчики, определяющие позицию кабины, расположенные на станциях пассажирской подвесной канатной дороги, концевые датчики, расположенные вдоль траектории движения кабины на станциях, датчики конечного положения дверей кабины и индукционные датчики контроля усилия зажима кабины, датчики контроля работоспособности электромеханических и гидравлических устройств, расположенные на этих устройствах, датчик скорости движения кабины, концевые выключатели, расположенные на обводных станциях, при этом аналоговые и дискретные значения от вышеперечисленных датчиков циклически поступают на модули дискретного и аналогового ввода двух работающих в паре программируемых логических контроллеров, которые обмениваются информацией о безопасности и режиме работы пассажирской подвесной канатной дороги между собой посредством ETHERNET и управляют приводной и обводной станциями пассажирской подвесной канатной дороги соответственно, формируя выходные значения на модули дискретного и аналогового вывода, задающие состояния исполнительных устройств, таких как реле, клапаны, электродвигатели, и формируют сообщения о работе пассажирской подвесной канатной дороги для системы сигнализации.
2. Автоматизированная система управления по п. 1, отличающаяся тем, что датчики контроля работоспособности электромеханических и гидравлических устройств представляют собой датчики контроля уровня жидкости и гидравлические датчики давления жидкости.
3. Автоматизированная система управления по п. 1, отличающаяся тем, что дополнительно содержит индуктивный датчик для бесконтактного определения положения зажима кабины.
4. Автоматизированная система управления по п. 1, отличающаяся тем, что в качестве датчика скорости движения используется энкодер, который расположен на шкиве тягового каната.
5. Автоматизированная система управления по п. 1, отличающаяся тем, что концевой выключатель отвечает за положение узла и коммутирует через себя напряжение 24 вольта от модуля ввода-вывода программируемого логического контроллера.
| Логвинов И.Н | |||
| и др | |||
| "УСТРОЙСТВА БЕЗОПАСНОСТИ, ПРИМЕНЯЕМЫЕ НА ПАССАЖИРСКИХ ПОДВЕСНЫХ КАНАТНЫХ ДОРОГАХ", Международный научно-исследовательский журнал, Часть 2, N8 (39), Екатеринбург, 2015, с.36-40 | |||
| СПОСОБ ЭКСПЛУАТАЦИИ КАНАТНОЙ ДОРОГИ | 2018 |
|
RU2729160C1 |
| CN 106314449 A, 11.01.2017 | |||
| US 20230271634 A1, 31.08.2023 | |||
| СИСТЕМА КОНТРОЛЯ БЕЗОПАСНОСТИ КАНАТНОЙ ДОРОГИ | 1995 |
|
RU2163204C2 |

