Техническая область
Настоящее изобретение касается механизма поворота гусеничной машины, особенно касается бесступенчатого механизма поворота гусеничной машины.
Область техники
Механизм поворота гусеничной машины отличается от механизма поворота колесной машины. При повороте колесной машины только нужно регулировать угол поворота колес машины. А механизм поворота, принимаемый для гусеничной машины, в основном предусматривает снижение скорости движения гусеницы в стороне управления торможением и поддержку скорости движения гусеницы в другой стороне для реализации поворота. Но такой способ управления легко вызывает опрокидывание гусеничной машины в процессе движения гусеничной машины с высокой скоростью при торможении гусеницы в одной стороне и поэтому характеризуется высоким коэффициентом опасности. Более того, такой способ управления реализуется путём искусственного управления торможением и обуславливает низкую точность поворота гусеничной машины.
Техническая проблема
В целях устранения дефектов существующей техники настоящее изобретение предусматривает бесступенчатый механизм поворота для гусеничной машины, который может реализовать непрерывную, точную регулировку числа оборотов левой, правой полуоси дифференциального механизма за счёт бесступенчатого вариатора с целью реализации точного поворота гусеничной машины, повышения безопасности движения гусеничной машины с высокой скоростью.
Бесступенчатый механизм поворота гусеничной машины, который включает в себя дифференциальный механизм, правый приводной вал, левый приводной вал, бесступенчатый вариатор для регулировки числа оборотов правого приводного вала, левого приводного вала. С дифференциальным механизмом соединяются левая полуось, правая полуось. Правая полуось дифференциального механизма работает вместе с правым приводным валом и правый приводной вал вращается для привода правой полуоси дифференциального механизма во вращение; левая полуось дифференциального механизма работает вместе с левым приводным валом и левый приводной вал вращается для привода левой полуоси дифференциального механизма во вращение. Отношение числа оборотов правой полуоси дифференциального механизма к числу оборотов правого приводного вала равно отношению числов левой полуоси дифференциального механизма к числу оборотов левого приводного вала.
Вышеуказанное техническое решение предусматривает регулировку числа оборотов правого и левого приводного вала за счёт бесступенчатого вариатора. При условии, когда число оборотов правого приводного вала равно числу оборотов левого приводного вала, число левой полуоси тоже равно числу правой полуоси дифференциального механизма и при этом гусеничная машина двигается по прямому направлению; а при увеличении числа оборотов правого приводного вала над числом оборотов левого приводного вала с помощью бесступенчатого вариатора наблюдается увеличение числа оборотов правой полуоси дифференциального механизма, которое приведёт к увеличению числа оборотов правой гусеницы машины. Таким образом, осуществляется поворот гусеничной машины в левую сторону. При снижении числа оборотов правого приводного вала до числа оборотов левого приводного вала наблюдается снижение числа оборотов правой полуоси дифференциального механизма, которое приведёт к снижению числа оборотов правой гусеницы машины. Таким образом, осуществляется поворот гусеничной машины в правую сторону. Поэтому бесступенчатый механизм поворота с такой конструкцией может реализовать непрерывную, точную регулировку числа оборотов левой, правой полуоси дифференциального механизма за счёт бесступенчатого вариатора с целью реализации точного поворота гусеничной машины, повышения безопасности движения гусеничной машины с высокой скоростью.
Дальнейшее описание конструкции изобретения: на правом приводном валу имеется первая правая передаточная, а на правой полуоси дифференциального механизма установлена вторая правая передаточная шестерня. Первая правая передаточная шестерня сцепляется со второй правой передаточной шестерней для обеспечения возможности работы правой полуоси дифференциального механизма вместе с правым приводным валом.
Работа правой полуоси дифференциального механизма вместе с правым приводным валом реализуется путём сцепления первой правой передаточной шестерни со второй правой передаточной шестерней. Такая конструкция простая и обещает стабильные передаточные характеристики. Более того, ещё можно регулировать число оборотов правого приводного вала путём изменения числа зубьев для первой правой передаточной шестерни, второй правой передаточной шестерни. Поэтому такой дизайн обеспечивает удобство применения.
Дальнейшее описание конструкции изобретения: на левом приводном валу имеется первая левая передаточная шестерня, а на левой полуоси дифференциального механизма установлена вторая левая передаточная шестерня. Первая левая передаточная шестерня сцепляется со второй левой передаточной шестерней для обеспечения возможности работы левой полуоси дифференциального механизма вместе с левым приводным валом.
Работа левой полуоси дифференциального механизма вместе с левым приводным валом реализуется путём сцепления первой левой передаточной шестерни со второй левой передаточной шестерней. Такая конструкция простая и обещает стабильные передаточные характеристики. Более того, ещё можно регулировать число оборотов левого приводного вала путём изменения числа зубьев для первой левой передаточной шестерни, второй левой передаточной шестерни. Поэтому такой дизайн обеспечивает удобство применения.
Описание приложенной фигуры
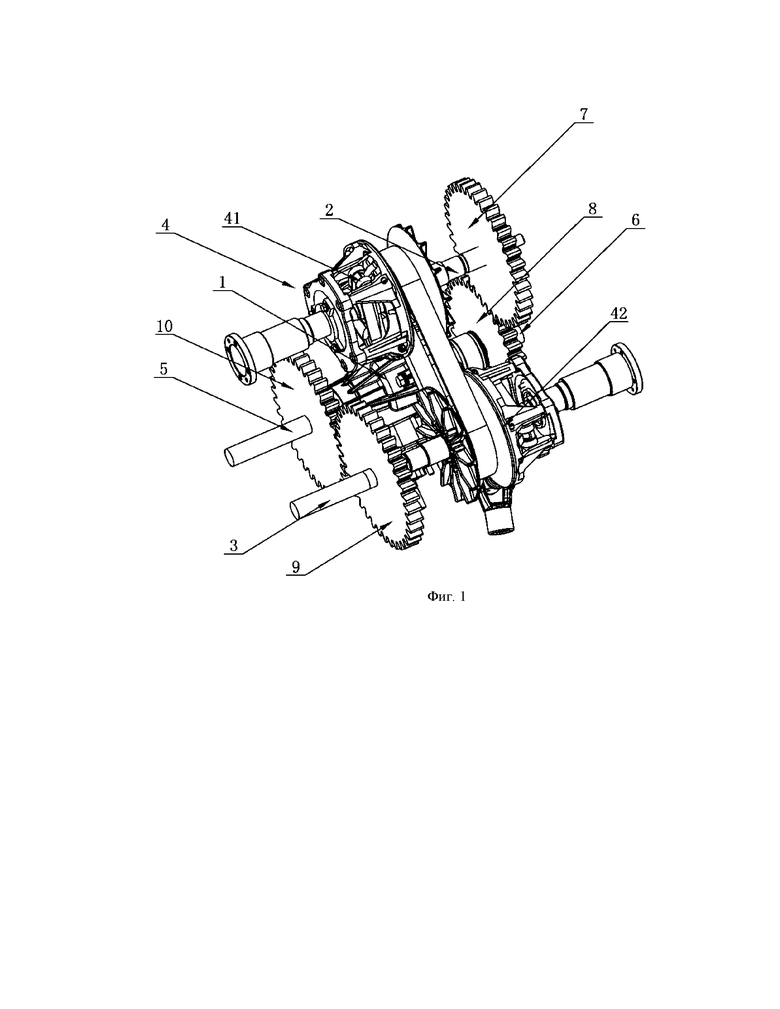
На фигуре 1 приведена конструктивная схема конкретного примера настоящего изобретения.
Способ реализации настоящего изобретения
На фигуре 1 приведена конструктивная схема бесступенчатого механизма поворота гусеничной машины. Бесступенчатый механизм поворота имеет в своем составе дифференциальный механизм 1, правый приводной вал 2, левый приводной вал 3, бесступенчатый вариатор 4 для регулировки скорости вращения правого приводного вала 2, левого приводного вала 3. С дифференциальным механизмом соединяются левая полуось 5, правая полуось 6. На правом приводном валу 2 имеется первая правая передаточная шестерня 7, а на правой полуоси 6 дифференциального механизма 1 установлена вторая правая приводная шестерня 8. Первая правая передаточная шестерня 7 сцепляется со второй правой передаточной шестерней 8 для обеспечения возможности работы правой полуоси 6 дифференциального механизма вместе с правым приводным валом 2. На левом приводном валу 3 имеется первая левая передаточная шестерня 9, а на левой полуоси 5 дифференциального механизма 1 установлена вторая левая передаточная шестерня 10. Первая левая передаточная шестерня 9 сцепляется со второй левой передаточной шестерней 10 для обеспечения возможности работы левой полуоси 5 дифференциального механизма 1вместе с левым приводным валом 3. Отношение числа оборотов правой полуоси 6 дифференциального механизма 1 к числу оборотов правого приводного вала 2 равно отношению числа левой полуоси 5 дифференциального механизма 1 к числу оборотов левого приводного вала 3. В конкретном примере реализации настоящего изобретения число оборотов правой полуоси 6 дифференциального механизма равно числу оборотов правого приводного вала 2, а число оборотов левой полуоси 5 дифференциального механизма 1 также равно числу оборотов левого приводного вала 3. В том числе дифференциальный механизм 1, бесступенчатый вариатор 4 являются техниками известными на весь мир. Здесь не будем детально описывать эти техники. Конкретный пример реализации настоящего изобретения предусматривает вставку дифференциального механизма на выходной вал, который приводит левую полуось 5, правую полуось 6 во вращение через планетарную шестерню в дифференциальном механизме 1. Бесступенчатый вариатор 4 применяет приводной ремень и два приводного колеса 41, 42 с регулируемым рабочим диаметром для передачи движущего усилия с целью реализации непрерывной регулировки передаточного числа. Правый приводной вал 2, левый приводной вал соответственно установлен внутри двух приводных колес 41, 42. Конечно, бесступенчатый вариатор 4 может иметь гидравлическое, электрическое исполнение.
В первоначальном состоянии два приводного колеса 41, 42 бесступенчатого вариатора вращаются с одинаковой скоростью, то есть число оборотов правого приводного вала 2 равно числу оборотов левого приводного вала 3. При этом число оборотов левой полуоси 5 также равно числу правой полуоси 6 дифференциального механизма 1. В этот момент гусеничная машина двигается по прямому направлению. При увеличении числа оборотов правого приводного вала 2 над числом оборотов левого приводного вала 3 с помощью бесступенчатого вариатора 4 наблюдается увеличение числа оборотов правого приводного вала 6 дифференциального механизма 1, которое может привести к увеличению числа оборотов правой гусеницы. Таким образом, реализуется поворот гусеничной машины в левую сторону. При снижении числа оборотов правого приводного вала 2 до числа оборотов левого приводного вала 3 с помощью бесступенчатого вариатора 4 наблюдается снижение числа оборотов правого приводного вала 6 дифференциального механизма 1, которое может привести к снижению числа оборотов правой гусеницы. Таким образом реализуется поворот гусеничной машины в правую сторону. Поэтому бесступенчатый механизм поворота с такой конструкцией может реализовать непрерывную, точную регулировку числа оборотов левой, правой полуоси 6 дифференциального механизма 1 через бесступенчатый вариатор 4 с целью реализации точного поворота гусеничной машины и повышения безопасности движения гусеничной машины с высокой скоростью.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ПРИВОДА | 2020 |
|
RU2748081C1 |
| Трансмиссия гусеничного транспортного средства | 1990 |
|
SU1766759A1 |
| ВАРИАТОРНЫЙ МЕХАНИЗМ ПОВОРОТА САМОХОДНЫХ МАШИН | 2003 |
|
RU2240246C1 |
| БЕССТУПЕНЧАТЫЙ ВАРИАТОР | 2008 |
|
RU2382258C1 |
| Механизм поворота | 1989 |
|
SU1803341A1 |
| МЕХАНИЗМ БЕССТУПЕНЧАТОГО ПОВОРОТА ТРАНСПОРТНОЙ МАШИНЫ (ВАРИАНТЫ) | 2002 |
|
RU2224677C1 |
| Трансмиссия гусеничного транспортного средства | 1989 |
|
SU1691207A1 |
| ШЕСТЕРЕНЧАТЫЙ ВАРИАТОР-2 | 2007 |
|
RU2341708C2 |
| Механизм поворота гусеничной машины | 1983 |
|
SU1094789A1 |
| ТРАКТОР | 2009 |
|
RU2401759C2 |
Изобретение относится к бесступенчатому механизму поворота гусеничной машины. Механизм поворота включает дифференциальный механизм (1), правый приводной вал (2), левый приводной вал (3), бесступенчатый вариатор (4) для регулировки скорости вращения правого приводного вала (2), левого приводного вала (3). С дифференциальным механизмом соединяются левая полуось (5), правая полуось (6). Правая полуось (6) дифференциального механизма (1) работает вместе с правым приводным валом (2). Правый приводной вал (2) вращается для привода правой полуоси (6) дифференциального механизма (1) во вращение. Левая полуось (5) дифференциального механизма (1) работает вместе с левым приводным валом (3). Левый приводной вал (3) вращается для привода левой полуоси (5) дифференциального механизма во вращение. Отношение числа оборотов правой полуоси (6) дифференциального механизма (1) к числу оборотов правого приводного вала (2) равно отношению чисел левой полуоси (5) дифференциального механизма (1) к числу оборотов левого приводного вала (3). Достигается повышение безопасности движения гусеничной машины при высокой скорости. 1 ил.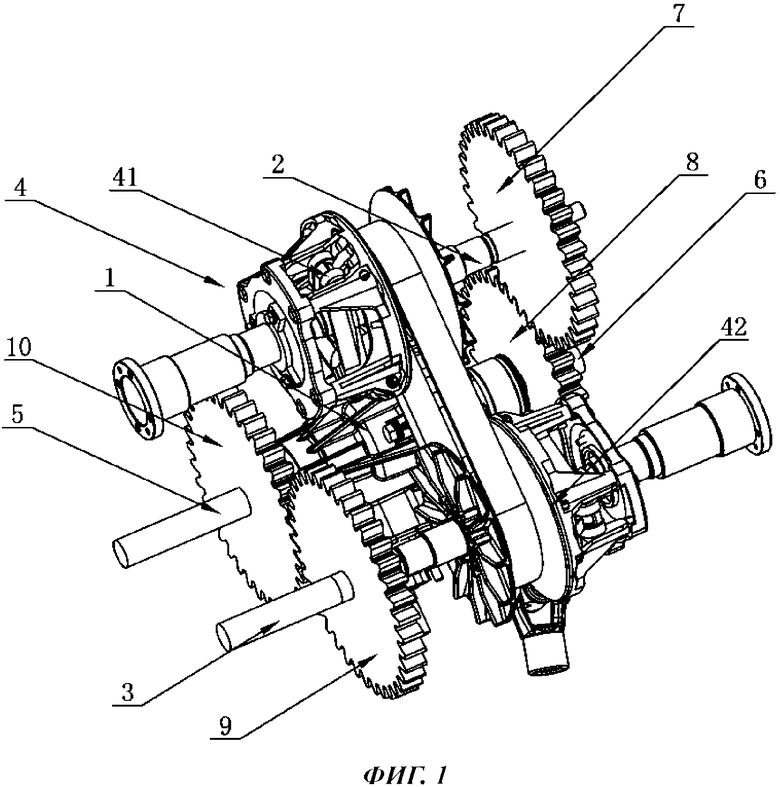
Бесступенчатый механизм поворота гусеничной машины, который включает в себя дифференциальный механизм, правый приводной вал, левый приводной вал, бесступенчатый вариатор для регулировки числа оборотов правого приводного вала, левого приводного вала, с дифференциальным механизмом соединяются левая полуось, правая полуось, правая полуось дифференциального механизма работает вместе с правым приводным валом и правый приводной вал вращается для привода правой полуоси дифференциального механизма во вращение; левая полуось дифференциального механизма работает вместе с левым приводным валом и левый приводной вал вращается для привода левой полуоси дифференциального механизма во вращение, отношение числа оборотов правой полуоси дифференциального механизма к числу оборотов правого приводного вала равно отношению чисел левой полуоси дифференциального механизма к числу оборотов левого приводного вала, при этом на правом приводном валу имеется первая правая передаточная шестерня, а на правой полуоси дифференциального механизма установлена вторая правая передаточная шестерня, первая правая передаточная шестерня сцепляется со второй правой передаточной шестерней, для обеспечения возможности работы правой полуоси дифференциального механизма вместе с правым приводным валом, на левом приводном валу имеется первая левая передаточная шестерня, а на левой полуоси дифференциального механизма установлена вторая левая передаточная шестерня, первая левая передаточная шестерня сцепляется со второй левой передаточной шестерней для обеспечения возможности работы левой полуоси дифференциального механизма вместе с левым приводным валом.
| Автомат для контроля и сортировки деталей | 1950 |
|
SU93063A1 |
| WO 8705574 A1, 24.09.1987 | |||
| US 4215755 A, 05.08.1980 | |||
| Металлический запор для мешков | 1930 |
|
SU25483A1 |
| ВАРИАТОРНЫЙ МЕХАНИЗМ ПОВОРОТА САМОХОДНЫХ МАШИН | 2003 |
|
RU2240246C1 |

