Данное изобретение относится к способу и устройству для определения амплитуды колебаний инструмента.
В уровне техники известны станки, у которых на режущую обработку детали инструментом на вращательное движение инструмента может накладываться ультразвуковое колебание инструмента.
EP 1 763 416 B1 описывает в этой связи инструмент с держателем инструмента, который на первом конце имеет гнездо держателя инструмента для адаптации к вращающемуся переднему концу шпинделя, а на втором конце, противоположном первому концу, гнездо инструмента, и с вставляемой в гнездо инструмента головкой инструмента, причем держатель инструмента включает в себя вибрационный двигатель.
Для того чтобы приводить инструмент в ультразвуковое колебание, может использоваться например пьезопривод, причем электрическое напряжение создает изменение толщины пьезопластин. Для определенных частот возникает при этом стоячая волна в держателе инструмента (резонансное возбуждение).
При этом следует учитывать, что резонансные частоты, а также амплитуды колебаний в резонансе зависят от свойств использованного инструмента, таких как его геометрия или материал, так что держатель инструмента не может уже с завода калиброваться на определенную амплитуду колебаний.
EP 1 431 729 A1 описывает устройство для измерения амплитуды свободно колеблющегося капилляра установки проволочной микросварки для проволочного соединения полупроводниковых чипов. При этом капилляр приводится в колебательное движение при помощи ультразвукового излучателя. Для измерения самой амплитуды обнаруживается при помощи приемника света затенение светового луча колеблющейся вершиной капилляра.
При этом в описанном в EP 1 431 729 A1 способе может доходить до прерывания светового луча посредством полного затенения светового луча вершиной капилляра. Так как только на основе степени затенения можно делать суждение, насколько капилляр колеблется, это суждение при варианте полного затенения больше не возможно, так как приемник света не может больше обнаруживать сигнал от светового луча. Таким образом, доходит до потери измерительного сигнала, что в свою очередь приводит к неудовлетворительному измерению колебания капилляра.
Далее описанный в EP 1 431 729 A1 способ ограничивается вращательно-симметричными инструментами, что подчеркивает пример капилляра установки проволочной микросварки. Однако ввиду того, что в большинстве случаев инструменты имеют асимметричности, которые вдаются в световой луч и вследствие этого оказывают отрицательное воздействие на измерение амплитуды колебаний, этот способ подходит в меньшей степени для таких инструментов.
Исходя из этого, задача данного изобретения предоставить способ и устройство, при помощи которого может измеряться амплитуда колебаний колеблющегося инструмента.
Эта задача решается с помощью способа согласно пункту 1 формулы изобретения и устройства согласно пункту 14 формулы изобретения. Зависимые пункты формулы изобретения относятся к предпочтительным примерам осуществления соответствующего изобретению способа и соответствующего изобретению устройства.
Соответствующий изобретению способ определения амплитуды колебаний инструмента включает в себя шаги: создание светового луча светового барьера с излучателем для создания светового луча и приемником для обнаружения силы света светового луча; создание сигнала приемника на основе обнаруженной приемником светового барьера силы света светового луча; позиционирование вершины инструмента в световом луче; приведение инструмента в колебательное движение; определение амплитуды колебаний инструмента из вызванной колебаниями инструмента модуляции сигнала приемника.
Таким образом, в самом станке создаются условия для конкретного в отношении инструмента измерения действительной амплитуды колебаний инструмента, например, в диапазоне частоты ультразвука. В качестве светового барьера может использоваться при этом обычный лазер измерения инструмента, который зачастую уже имеется в станке. Таким образом, соответствующий изобретению способ может экономично реализовываться без конструктивных изменений станка, так как он может выполняться при помощи уже имеющегося оснащения станка без дополнительного монтажа внутри станка. Сверх этого, измерение амплитуды колебаний происходит бесконтактным образом при помощи светового барьера, так что инструмент не может повреждаться.
Предпочтительно способ дополняется следующим шагом: приведение инструмента во вращательное движение вокруг оси, перпендикулярной световому лучу, в частности во время измерения амплитуды колебаний или во время возбуждения колебаний инструмента, если инструмент находится в световом луче.
В частности, способ предпочтительно включает в себя установку инструмента, соответственно, удерживающего инструмент держателя инструмента в рабочем шпинделе станка и приведение инструмента во вращательное движение при помощи рабочего шпинделя, в частности, во время шага определения амплитуды колебаний инструмента из вызванной колебаниями инструмента модуляции или изменения сигнала приемника, если инструмент размещен в световом луче.
Преимущество заключается, в частности, в том, что благодаря вращению, например, приведению во вращательное движение рабочим шпинделем станка, даже инструменты с не вращательно-симметричной конструкцией кажутся на перпендикулярном к оси вращения виде вращательно-симметричным инструментом. Это в свою очередь может наиболее предпочтительно использоваться для измерения амплитуды колебаний инструмента, так как вследствие этого обращенная от приводящего в движение инструмент шпинделя сторона инструмента образует, по меньшей мере, кольцеобразную поверхность или круглое кольцо вокруг оси вращения инструмента. Эта поверхность или кольцо может в свою очередь использоваться для затенения светового луча, что при не вращательно-симметричном инструменте оказывалось затруднительным без вращения.
Далее способ может предпочтительно усовершенствоваться благодаря тому, что инструмент имеет, по меньшей мере, одну режущую кромку (например, фрезерную режущую кромку фрезерного инструмента), которая выступает, например, в направлении колебаний инструмента от остального инструмента.
Преимущество заключается в том, что геометрия инструмента может быть выполнена произвольной в направлении колебаний, так как благодаря вращению инструмента могут снова компенсироваться возможные асимметричности.
Дополнительно способ может усовершенствоваться предпочтительно благодаря тому, что режущая кромка инструмента дополнительно выступает перпендикулярно к направлению колебаний инструмента от остального инструмента.
Также в этом случае преимущество заключается в том, что геометрия инструмента, в частности, при не вращательно-симметричной или не постоянно вращательно-симметричной геометрии инструмента, теперь больше не оказывает существенного влияния на измерительную схему, соответственно, достоверность измерения амплитуды колебаний инструмента, так как благодаря приведенному во вращательному движение инструменту также в этом случае могут компенсироваться возможные асимметричности.
Кроме того, это имеет то преимущество, что амплитуда колебаний может измеряться непосредственно при используемом также для будущих обработок деталей закреплении инструмента, соответственно, держателя инструмента на рабочем шпинделе станка, при необходимости непосредственно перед обработкой детали.
Предпочтительно перед приведением инструмента в колебательное движение положение вершины инструмента в световом луче варьируется таким образом, что интенсивность сигнала приемника изменяется в зависимости от положения вершины инструмента.
Это имеет то преимущество, что ни на функциональность, ни на точность способа не оказывает влияние геометрия или материал инструмента, так как исключительно степень затенения светового луча инструментом является решающей для измерения амплитуды.
Предпочтительно положение вершины инструмента в области внутри светового луча варьируется пошагово вдоль направления, перпендикулярного световому лучу, и при каждом шаге с положением вершины инструмента согласовывается соответствующая интенсивность сигнала приемника.
Таким образом, осуществляется калибровка системы для абсолютного измерения амплитуды. При калибровке устанавливается функциональная зависимость между положением вершины инструмента и интенсивностью сигнала приемника, так что в более поздний момент времени из измеренной интенсивности сигнала приемника может определяться сопутствующее положение вершины инструмента.
Предпочтительно амплитуда колебаний инструмента определяется из разности максимальной интенсивности и минимальной интенсивности сигнала приемника.
После выполненной калибровки, для колеблющегося инструмента может из максимальной интенсивности сигнала определяться первое положение вершины инструмента, а из минимальной интенсивности сигнала второе положение вершины инструмента. Разность этих обоих положений дает в итоге амплитуду колебаний инструмента.
Предпочтительно направление, перпендикулярное световому лучу, соответствует направлению оси инструмента.
Таким образом, может определяться амплитуда колебаний для колеблющегося в осевом направлении инструмента.
Альтернативно направление, перпендикулярное световому лучу, предпочтительно соответствует направлению, перпендикулярному оси инструмента.
Таким образом, может определяться амплитуда колебаний для инструмента, который колеблется в направлении, перпендикулярном оси инструмента. Соответствующий изобретению способ делает таким образом возможным идентификацию колебаний инструмента в нескольких направлениях.
Предпочтительно сигнал приемника является аналоговым сигналом напряжения, который создан приемником и пропорционален обнаруженной приемником силе света.
Это имеет то преимущество, что необходимые вычисления могут просто и быстро выполняться на основе линейной зависимости между силой света и напряжением.
Предпочтительно инструмент приводится в колебательное движение таким образом, что вершина инструмента колеблется внутри светового луча.
Например, колеблющаяся вершина инструмента позиционируется для измерения амплитуды колебаний в световом барьере таким образом, что вершина инструмента имеет приблизительно одинаковое расстояние до излучателя и приемника и находится приблизительно посередине диаметра светового луча. Диаметр светового луча выбирается настолько широким, что вершина инструмента полностью колеблется внутри светового луча. Таким образом, модуляция сигнала приемника напрямую отображает колебания инструмента.
Предпочтительно соответствующий изобретению способ включает в себя следующие шаги: создание сигнала датчика из колебаний инструмента, расположенного в держателе инструмента, посредством расположенного в держателе инструмента сенсорного устройства; определение частоты колебаний инструмента из сигнала датчика в зависимости от амплитуды колебаний инструмента; определение амплитуды колебаний инструмента из сигнала датчика.
Это имеет то преимущество, что после однократно выполненной калибровки для определенного инструмента при помощи светового барьера световой барьер больше не требуется для измерения амплитуды и может сниматься, так как амплитуда колебаний колеблющегося инструмента может напрямую определяться из сигнала датчика.
Предпочтительно частота колебаний инструмента варьируется пошагово, и при каждом шаге с частотой колебаний согласовывается соответствующая амплитуда колебаний инструмента.
Другими словами двухступенчатая калибровка осуществляется таким образом, что сначала устанавливается функциональная зависимость между положением вершины инструмента и интенсивностью сигнала приемника, так что для колеблющегося инструмента может из минимального и максимального значения сигнала приемника делаться вывод об амплитуде колебаний. Затем устанавливается функциональная зависимость между амплитудой колебаний и частотой колебаний, так что для колеблющегося инструмента может из измеренной частоты колебаний делаться вывод об амплитуде колебаний.
Соответствующее изобретению устройство для определения амплитуды колебаний инструмента включает в себя: световой барьер с излучателем для создания светового луча и приемником для обнаружения силы света светового луча и для создания сигнала приемника на основе обнаруженной силы света; устройство для позиционирования вершины инструмента в световом луче; устройство для приведения инструмента в колебательное движение; устройство для определения амплитуды колебаний инструмента из вызванной колебаниями инструмента модуляции сигнала приемника.
Таким образом, в самом станке создаются условия для конкретного в отношении инструмента измерения действительной амплитуды колебаний инструмента, например, в диапазоне частоты ультразвука. В качестве светового барьера может использоваться при этом обычный лазер измерения инструмента, который зачастую уже имеется в станке. Таким образом, соответствующее изобретению устройство может экономично оборудоваться без конструктивных изменений станка при помощи уже имеющегося оснащения станка без дополнительного монтажа внутри станка. Сверх этого, измерение амплитуды колебаний происходит бесконтактным образом при помощи светового барьера, так что инструмент не может повреждаться.
Предпочтительно устройство для позиционирования вершины инструмента приспособлено для того, чтобы положение вершины инструмента в световом луче варьировать таким образом, что интенсивность сигнала приемника изменяется в зависимости от положения вершины инструмента.
Это имеет то преимущество, что ни на функциональность, ни на точность устройства не оказывает влияние геометрия или материал инструмента, так как исключительно степень затенения светового луча инструментом является решающей для измерения амплитуды.
Предпочтительно устройство включает в себя устройство для согласования интенсивности сигнала приемника с положением вершины инструмента, причем устройство для позиционирования вершины инструмента приспособлено для того, чтобы положение вершины инструмента в области внутри светового луча варьировать пошагово вдоль направления, перпендикулярного световому лучу, и устройство для согласования интенсивности сигнала приемника с положением вершины инструмента приспособлено для того, чтобы при каждом шаге с положением вершины инструмента согласовывать соответствующую интенсивность сигнала приемника.
Таким образом, осуществляется калибровка системы для абсолютного измерения амплитуды при помощи соответствующего изобретению устройства. При калибровке устанавливается функциональная зависимость между положением вершины инструмента и интенсивностью сигнала приемника, так что в более поздний момент времени из измеренной интенсивности сигнала приемника может определяться сопутствующее положение вершины инструмента.
Предпочтительно устройство для определения амплитуды колебаний инструмента приспособлено для того, чтобы определять амплитуду колебаний инструмента из разности максимальной интенсивности и минимальной интенсивности сигнала приемника.
После выполненной калибровки может при помощи устройства, для колеблющегося инструмента определяться из максимальной интенсивности сигнала первое положение вершины инструмента, а из минимальной интенсивности сигнала второе положение вершины инструмента. Разность этих обоих положений дает в итоге амплитуду колебаний инструмента.
Предпочтительно направление, перпендикулярное световому лучу, соответствует направлению оси инструмента.
Таким образом, может определяться амплитуда колебаний для колеблющегося в осевом направлении инструмента.
Альтернативно направление, перпендикулярное световому лучу, предпочтительно соответствует направлению, перпендикулярному оси инструмента.
Таким образом, может определяться амплитуда колебаний для инструмента, который колеблется в направлении, перпендикулярном оси инструмента. Соответствующее изобретению устройство делает таким образом возможным идентификацию колебаний инструмента в нескольких направлениях.
Предпочтительно приемник светового барьера приспособлен для того, чтобы создавать сигнал приемника в виде аналогового сигнала напряжения, который пропорционален обнаруженной приемником силе света.
Это имеет то преимущество, что необходимые вычисления могут просто и быстро выполняться на основе линейной зависимости между силой света и напряжением.
Предпочтительно устройство для приведения инструмента в колебательное движение приспособлено для того, чтобы приводить инструмент в колебательное движение таким образом, что вершина инструмента колеблется внутри светового луча.
Например, колеблющаяся вершина инструмента позиционируется для измерения амплитуды колебаний в световом барьере таким образом, что вершина инструмента имеет приблизительно одинаковое расстояние до излучателя и приемника и находится приблизительно посередине диаметра светового луча. Диаметр светового луча выбирается настолько широким, что вершина инструмента полностью колеблется внутри светового луча. Таким образом, модуляция сигнала приемника напрямую отображает колебания инструмента.
Предпочтительно соответствующее изобретению устройство включает в себя далее: держатель инструмента для приема инструмента; расположенное в держателе инструмента сенсорное устройство для создания сигнала датчика из колебаний инструмента; устройство для определения частоты колебаний инструмента из сигнала датчика в зависимости от амплитуды колебаний инструмента; и устройство для определения амплитуды колебаний инструмента из сигнала датчика.
Это имеет то преимущество, что после однократно выполненной калибровки для определенного инструмента при помощи светового барьера световой барьер больше не требуется для измерения амплитуды и может сниматься, так как амплитуда колебаний колеблющегося инструмента может напрямую определяться из сигнала датчика.
Предпочтительно устройство включает в себя далее: устройство для пошагового варьирования частоты колебаний инструмента и устройство для согласования амплитуды колебаний инструмента с частотой колебаний, причем устройство для согласования амплитуды колебаний инструмента с частотой колебаний приспособлено для того, чтобы при каждом шаге с частотой колебаний согласовывать соответствующую амплитуду колебаний инструмента.
Другими словами соответствующее изобретению устройство делает возможной такую двухступенчатую калибровку, что сначала устанавливается функциональная зависимость между положением вершины инструмента и интенсивностью сигнала приемника, так что для колеблющегося инструмента может из минимального и максимального значения сигнала приемника делаться вывод об амплитуде колебаний. Затем устанавливается функциональная зависимость между амплитудой колебаний и частотой колебаний, так что для колеблющегося инструмента может из измеренной частоты колебаний делаться вывод об амплитуде колебаний.
Соответствующий изобретению станок включает в себя соответствующее изобретению устройство и приспособлен для того, чтобы определять амплитуду колебаний инструмента согласно соответствующему изобретению способу.
На чертежах показаны:
фиг.1 - фрагмент примера осуществления соответствующего изобретению устройства;
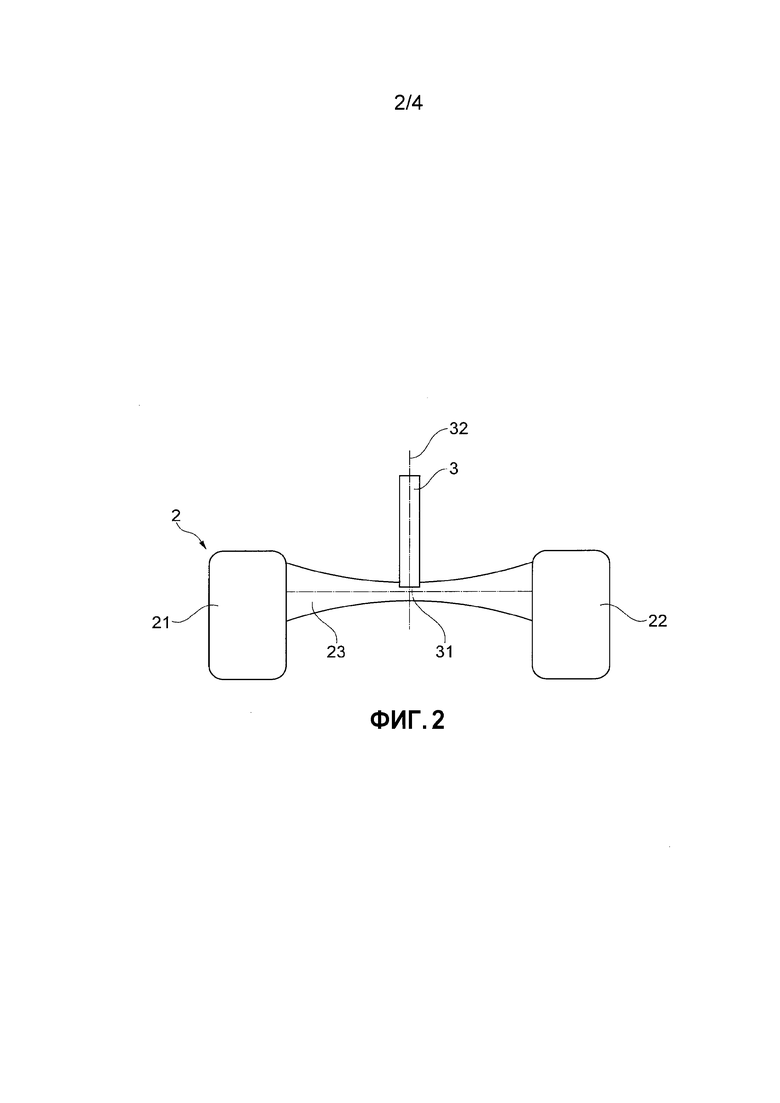
фиг.2 - схематично фрагмент примера осуществления соответствующего изобретению устройства;
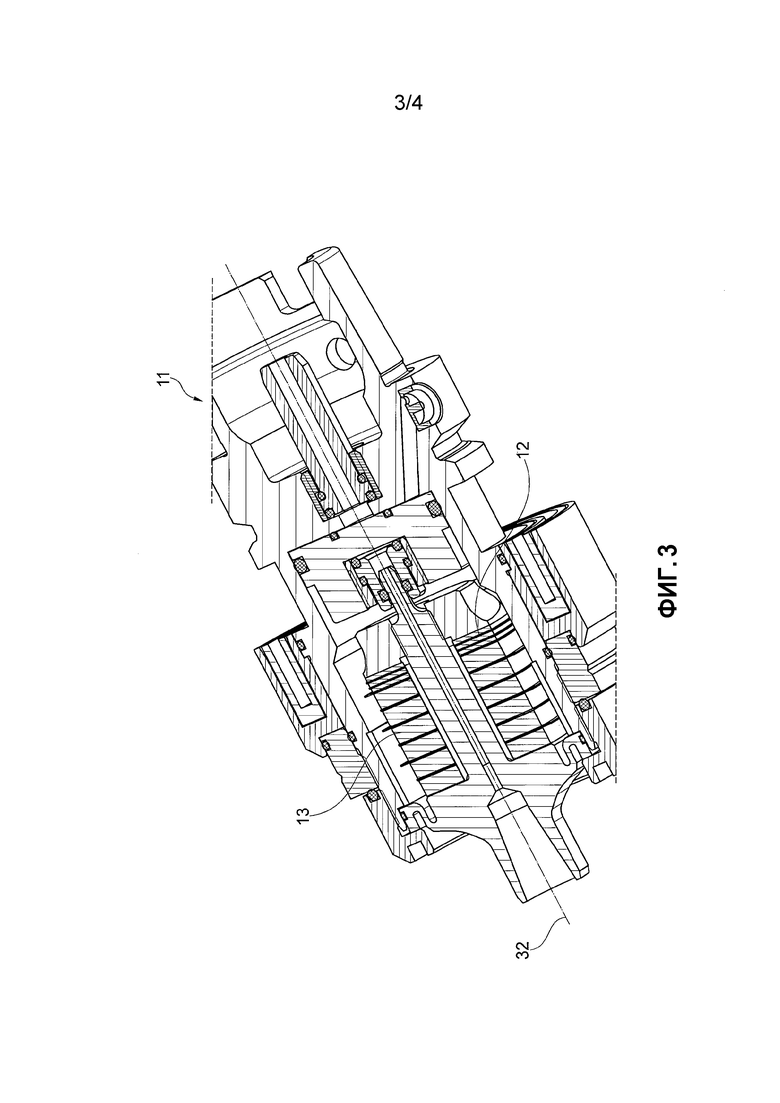
фиг.3 - в качестве примера держатель инструмента для использования в соответствующем изобретению способе; и
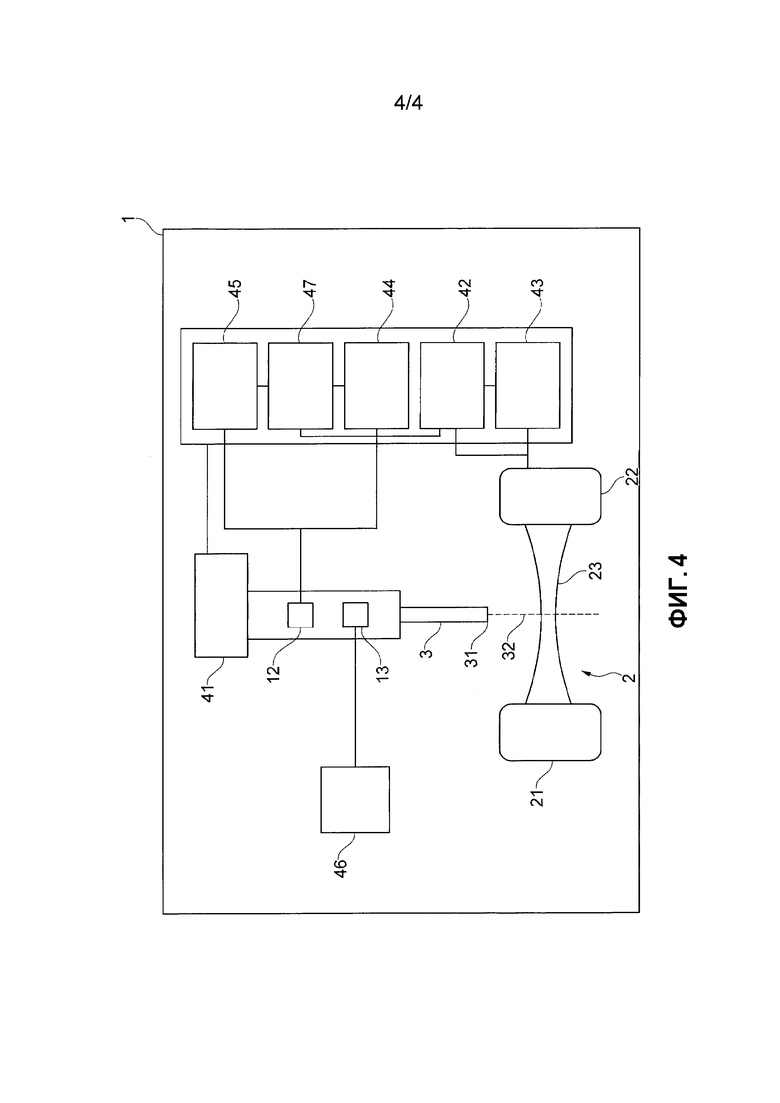
фиг.4 - схематично пример осуществления соответствующего изобретению устройства.
В дальнейшем данное изобретение подробно описывается и разъясняется при помощи примеров осуществления и примерного чертежа.
Фиг.1 показывает фрагмент примера осуществления соответствующего изобретению устройства. Показан световой барьер 2 с излучателем 21, который создает световой луч 23 (не виден на фиг. 1) и с приемником 22, который обнаруживает силу света светового луча 23. В качестве светового барьера 2 может использоваться, например, система для бесконтактного обнаружения поломки инструмента от RENISHAW или BLUM Lasersystem для контроля инструмента и контроля поломки, у которой собранный в фокусе лазерный луч 23 испускается излучателем 21, и приемник 22 ориентирован таким образом, что лазерный луч 23 попадает на приемник 22. Этот световой лазерный барьер 2 монтируется при помощи несущей или монтажной системы в пространстве обработки станка 1 внутри зоны перемещений осей для инструмента 3. Монтаж светового барьера 2 возможен на или рядом со столом станка. Приемник 22 создает сигнал приемника, который пропорционален обнаруженной силе света и выдается приемником 22 в виде аналогового сигнала напряжения.
Дополнительно станок 1 имеет шпиндель 50 (например, несущий инструмент рабочий шпиндель), в котором инструмент 3 установлен при помощи держателя 11 инструмента. Шпиндель 50 приспособлен помимо этого для того, чтобы приводить держатель 11 инструмента, а также инструмент 3 во вращательное движение. В то время как шпиндель 50 приводит инструмент 3 во вращение, происходит измерение амплитуды колебаний, например, при помощи испущенного излучателем 21 светового луча 23 и обнаруженной приемником 22 силы света затененного инструментом 3 светового луча 23.
В частности, определение амплитуды колебаний инструмента 3 осуществляется в качестве примера следующим образом: Держатель 11 инструмента позиционируется таким образом, что вершина 31 инструмента 3, который установлен в держателе 11 инструмента, находится между излучателем 21 и приемником 22 в световом луче 23 светового барьера 2 и таким образом затеняет световой луч 23. Если инструмент 3 приводится в ультразвуковое колебание, то степень затенения изменяется ввиду колеблющейся в световом луче 23 вершины 31 инструмента. Это приводит к модуляции сигнала приемника, из которого может определяться амплитуда колебаний инструмента.
Этот основной принцип изобретения подробно разъясняется при помощи фиг.2. Сначала система калибруется. Для этого вершина 31 неколеблющегося инструмента 3 позиционируется рядом со световым лучом 23 в области "талии" луча. В "талии" луча диаметр светового луча 23 является наименьшим. Ось 32 инструмента ориентирована перпендикулярно к световому лучу 23. Затем вершина 31 инструмента при помощи подвижных осей станка 1 перемещается с шагами, например, в 1 мкм, в направлении вдоль оси 32 инструмента через световой луч 23. Вследствие этого световой луч 23 все больше затеняется. При каждом шаге сила света измеряется приемником 22, преобразовывается в сигнал приемника, и значение напряжения согласовывается с текущим положением инструмента. Таким образом, получают функцию положения инструмента в зависимости от напряжения. Диаметр "талии" луча при этом настолько велик, что требуется несколько шагов позиционирования, для того чтобы проходить от полной силы света до полного затенения, и является существенно большим, чем максимально ожидаемая амплитуда колебаний вершины 31 инструмента.
После выполненной калибровки амплитуда колебаний может определяться следующим образом: Вершина 31 инструмента позиционируется приблизительно посередине в отношении "талии" луча и в отношении излучателя 21 и приемника 22 в световом луче 23 и приводится в ультразвуковое колебание. Колеблющаяся вершина 31 инструмента вызывает вследствие этого модулирование пропорционального силе света сигнала приемника. Из пиковых значений сигнала приемника, при помощи определенной до этого функции положения инструмента в зависимости от напряжения определяется амплитуда колебаний.
При калибровке можно также действовать таким образом, что вершина 31 инструмента смещается не вдоль оси 32 инструмента, а в направлении, перпендикулярном оси 32 инструмента и световому лучу 23. Эта калибровка используется, для того чтобы определять амплитуду колебаний инструмента в направлении, перпендикулярном оси 32 инструмента.
Фиг.3 показывает в качестве примера держатель 11 инструмента для использования в соответствующем изобретению способе, при помощи которого после выполненной калибровки может измеряться амплитуда колебаний инструмента 3 даже без светового барьера 2. Для этого систем калибруется следующим образом.
Сначала, как было описано при помощи фиг.2, определяется функция положения инструмента в зависимости от напряжения сигнала приемника.
Держатель 11 инструмента оснащен сенсорным устройством 12, которое из колебаний инструмента создает сигнал датчика, который содержит информацию о частоте колебаний инструмента. Сигнал датчика может анализироваться за пределами держателя 11 инструмента анализатором (не показан).
Инструмент 3 приводится теперь в ультразвуковое колебание. Это может происходить таким образом, что генератор (не показан) приводит пьезоэлемент 13 в держателе 11 инструмента в механические колебания, которые передаются на инструмент 3. Частота колебаний может определяться из созданного сенсорным устройством 12 сигнала датчика; амплитуда может определяться из созданного приемником 22 светового барьера 2 сигнала приемника.
Затем частота колебаний инструмента 3 пошагово варьируется, например, благодаря тому, что варьируется частота возбуждения генератора. При каждом шаге частота колебаний, а также амплитуда колебаний измеряются, и частота колебаний согласовывается с соответствующей амплитудой колебаний. Таким образом, получают функцию амплитуды колебаний в зависимости от частоты колебаний. Теперь световой барьер 2 может удаляться.
Амплитуда колебаний инструмента 3 может после выполненной таким образом калибровки системы определяться без помощи светового барьера 2. Для этого инструмент 3 приводится в колебательное движение, и частота колебаний определяется из сигнала датчика. Из определенной перед этим функции амплитуды колебаний в зависимости от частоты колебаний может определяться соответствующая амплитуда колебаний.
Фиг.4 схематично показывает пример осуществления соответствующего изобретению устройства. Устройство 41 для позиционирования вершины 31 инструмента может иметься, например, в виде подвижных осей, которые устройством ЧПУ станка 1 могут по отдельности перемещаться и таким образом приводят установленный на одной из осей держатель 11 инструмента с инструментом 3 в необходимое положение. Устройство 13 для приведения инструмента 3 в колебательное движение может соответствовать пьезоэлементу 13 на фиг.3 в держателе 11 инструмента. Устройство 46 для варьирования частоты колебаний инструмента 3 может быть выполнено в виде генератора, который приводит пьезоэлемент 13 с определенной частотой возбуждения в ультразвуковые колебания, причем эта частота возбуждения может варьироваться.
Устройство 42 для определения амплитуды колебаний из сигнала приемника, устройство 43 для согласования интенсивности сигнала с положением вершины инструмента, устройство 44 для определения частоты колебаний, устройство 45 для определения амплитуды колебаний из сигнала датчика, устройство 46 для варьирования частоты колебаний и устройство 47 для согласования амплитуды колебаний с частотой колебаний могут быть частью электроники станка 1.
При этом устройство 43 для согласования интенсивности сигнала с положением вершины инструмента может быть соединено с приемником 22 светового барьера 2, для того чтобы получать сигнал приемника от приемника 22. Сверх этого, устройство 43 для согласования интенсивности сигнала с положением вершины инструмента может передавать данные калибровки на устройство 42 для определения амплитуды колебаний из сигнала приемника, которое также получает сигнал приемника от приемника 22.
Устройство 44 для определения частоты колебаний может быть соединено с сенсорным устройством 12 в держателе 11 инструмента, для того чтобы получать сигнал датчика от сенсорного устройства 12. Сверх этого, устройство 44 для определения частоты колебаний может передавать данные о частоте колебаний на устройство 47 для согласования амплитуды колебаний с частотой колебаний, которое в свою очередь получает данные об амплитуде колебаний от устройства 42 для определения амплитуды колебаний из сигнала приемника.
Устройство 47 для согласования амплитуды колебаний с частотой колебаний передает данные калибровки на устройство 45 для определения амплитуды колебаний из сигнала датчика, которое дополнительно получает сигнал датчика от сенсорного устройства 12.
Несколько или все из устройств с 42 по 45 и 47 могут быть также объединены в одно устройство.
Настоящее изобретение не ограничено описанными выше примерами осуществления, а наоборот отдельные аспекты или отдельные признаки вышеописанных примеров осуществления могут комбинироваться, для того чтобы предоставлять дальнейшие примеры осуществления данного изобретения.
СПИСОК ССЫЛОЧНЫХ ПОЗИЦИЙ
1 станок
11 держатель инструмента
12 сенсорное устройство
13 пьезоэлемент
2 световой барьер
21 излучатель
22 приемник
23 световой луч
3 инструмент
31 вершина инструмента
32 ось инструмента
41 устройство для позиционирования вершины инструмента
42 устройство для определения амплитуды колебаний из сигнала приемника
43 устройство для согласования интенсивности сигнала с положением вершины инструмента
44 устройство для определения частоты колебаний
45 устройство для определения амплитуды колебаний из сигнала датчика
46 устройство для варьирования частоты колебаний
47 устройство для согласования амплитуды колебаний с частотой колебаний
50 шпиндель
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ВИБРАЦИОННОГО РЕЗАНИЯ И ВИБРАЦИОННЫЙ РЕЗЕЦ | 2007 |
|
RU2356700C1 |
| СПОСОБ ОПТИЧЕСКИХ ИЗМЕРЕНИЙ ДЛЯ МАТЕРИАЛА | 2009 |
|
RU2423684C2 |
| САМОДИАГНОСТИРОВАНИЕ ВИБРАЦИОННОГО УРОВНЕМЕРА | 2005 |
|
RU2378623C2 |
| Устройство компенсации погрешностей обработки на металлорежущих станках | 1986 |
|
SU1706836A1 |
| СПОСОБ ИЗМЕРЕНИЯ АМПЛИТУДЫ КОЛЕБАНИЙ СТЕРЖНЕВОЙ УЛЬТРАЗВУКОВОЙ КОЛЕБАТЕЛЬНОЙ СИСТЕМЫ | 2008 |
|
RU2386112C2 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП | 2011 |
|
RU2461839C1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ОРИЕНТАЦИИ В ПРОСТРАНСТВЕ ИСПОЛНИТЕЛЬНОГО ОРГАНА МАШИНЫ С ЧПУ | 1988 |
|
RU2009764C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ АНАЛИЗА КОЛЕБАНИЙ, А ТАКЖЕ БАЗА ДАННЫХ ОБРАЗОВ ДЛЯ НИХ И ПРИМЕНЕНИЕ БАЗЫ ДАННЫХ ОБРАЗОВ | 2009 |
|
RU2545501C2 |
| СПОСОБ ОЦЕНКИ ШЕРОХОВАТОСТИ ПОВЕРХНОСТИ ДЕТАЛИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2012 |
|
RU2541730C2 |
| Устройство управления процессом резания | 1987 |
|
SU1759604A1 |

Изобретение относится к метрологии, в частности к способу определения амплитуды колебаний режущего инструмента. Способ заключается в создании луча светового барьера, позиционировании вершины режущего инструмента в световом луче, приведении режущего инструмента в колебательное движение, определении амплитуды колебаний режущего инструмента из вызванной колебаниями режущего инструмента модуляции светового луча. Перед приведением режущего инструмента в колебательное движение положение вершины инструмента варьируют таким образом, что интенсивность сигнала приемника изменяется в зависимости от положения вершины инструмента, и причем положение вершины инструмента в области внутри светового луча варьируют пошагово вдоль направления, перпендикулярного световому лучу, и при каждом шаге с положением вершины инструмента согласовывают соответствующую интенсивность сигнала приемника. Устройство для определения амплитуды колебаний режущего инструмента содержит пьезоэлемент и датчик, закрепленные в держателе, устройство изменения частоты колебаний, устройство для позиционирования вершины инструмента, устройство для определения амплитуды колебаний, устройство для согласования амплитуды колебаний с частотой колебаний, устройство для определения частоты колебаний, устройство для согласования интенсивности сигнала с положением вершины инструмента. Технический результат – повышение точности измерений. 3 н. и 17 з.п. ф-лы, 4 ил.
1. Способ определения амплитуды колебаний режущего инструмента (3), включающий в себя шаги:
создание светового луча (23) светового барьера (2) с излучателем (21) для создания светового луча (23) и приемником (22) для обнаружения силы света светового луча (23);
создание сигнала приемника на основе силы света светового луча (23), обнаруженной приемником (22) светового барьера (2);
позиционирование вершины (31) режущего инструмента (3) в световом луче (23);
приведение режущего инструмента (3) в колебательное движение; и
определение амплитуды колебаний режущего инструмента (3) из вызванной колебаниями режущего инструмента (3) модуляции сигнала приемника,
причем перед приведением режущего инструмента (3) в колебательное движение положение вершины (31) инструмента в световом луче (23) варьируют таким образом, что интенсивность сигнала приемника изменяется в зависимости от положения вершины (31) инструмента, и
причем положение вершины (31) инструмента в области внутри светового луча (23) варьируют пошагово вдоль направления, перпендикулярного световому лучу (23), и при каждом шаге с положением вершины (31) инструмента согласовывают соответствующую интенсивность сигнала приемника.
2. Способ по п.1, причем способ имеет далее следующий шаг: приведение режущего инструмента (3) во вращательное движение вокруг оси, поперечной или перпендикулярной световому лучу (23), и/или вокруг оси режущего инструмента, в частности, во время шага определения амплитуды колебаний режущего инструмента (3).
3. Способ по п.1 или 2, причем режущий инструмент (3) имеет по меньшей мере одну режущую кромку, которая выступает в направлении колебаний режущего инструмента (3) от остального режущего инструмента (3).
4. Способ по п.1 или 2, причем режущий инструмент (3) имеет по меньшей мере одну режущую кромку, которая выступает перпендикулярно к направлению колебаний режущего инструмента (3) от остального режущего инструмента (3).
5. Способ по любому из пп.1-4, причем амплитуда колебаний режущего инструмента (3) определяется из разности максимальной интенсивности и минимальной интенсивности сигнала приемника.
6. Способ по п.1 или 5, причем направление, перпендикулярное световому лучу (23), соответствует направлению оси (32) инструмента.
7. Способ по любому из пп.1-5, причем направление, перпендикулярное световому лучу (23), соответствует направлению, перпендикулярному оси (32) инструмента.
8. Способ по любому из пп.1-7, причем сигнал приемника является аналоговым сигналом напряжения, который создан приемником (22) и пропорционален обнаруженной приемником (22) силе света.
9. Способ по любому из пп.1-8, причем режущий инструмент (3) приводится в колебательное движение таким образом, что вершина (31) инструмента колеблется внутри светового луча (23).
10. Способ по любому из пп.1-9, включающий в себя дополнительные шаги:
создание сигнала датчика из колебаний режущего инструмента (3), расположенного в держателе (11) инструмента, расположенным в держателе (11) инструмента сенсорным устройством (12);
определение частоты колебаний режущего инструмента (3) из сигнала датчика в зависимости от амплитуды колебаний режущего инструмента (3); и
определение амплитуды колебаний режущего инструмента (3) из сигнала датчика.
11. Способ по п.10, причем частота колебаний режущего инструмента (3) варьируется пошагово, и при каждом шаге с частотой колебаний согласовывается соответствующая амплитуда колебаний режущего инструмента (3).
12. Устройство для определения амплитуды колебаний режущего инструмента (3), включающее в себя:
световой барьер (2) с излучателем (21) для создания светового луча (23) и приемником (22) для обнаружения силы света светового луча (23) и для создания сигнала приемника на основе обнаруженной силы света;
устройство (41) для позиционирования вершины (31) режущего инструмента (3) в световом луче (23);
устройство (13) для приведения режущего инструмента (3) в колебательное движение; и
устройство (42) для определения амплитуды колебаний режущего инструмента (3) из вызванной колебаниями режущего инструмента (3) модуляции сигнала приемника,
причем устройство (41) для позиционирования вершины (31) инструмента приспособлено для того, чтобы положение вершины (31) инструмента в световом луче (23) варьировать таким образом, что интенсивность сигнала приемника изменяется в зависимости от положения вершины (31) инструмента,
причем дополнительно предусмотрено устройство (43) для согласования интенсивности сигнала приемника с положением вершины (31) инструмента, причем
устройство (41) для позиционирования вершины (31) инструмента приспособлено для того, чтобы положение вершины (31) инструмента в области внутри светового луча (23) варьировать пошагово вдоль направления, перпендикулярного световому лучу (23), и
устройство (43) для согласования интенсивности сигнала приемника с положением вершины (31) инструмента приспособлено для того, чтобы при каждом шаге с положением вершины (31) инструмента согласовывать соответствующую интенсивность сигнала приемника.
13. Устройство по п.12, причем устройство (42) для определения амплитуды колебаний режущего инструмента (3) приспособлено для того, чтобы определять амплитуду колебаний режущего инструмента (3) из разности максимальной интенсивности и минимальной интенсивности сигнала приемника.
14. Устройство по п.12, причем направление, перпендикулярное световому лучу (23), соответствует направлению оси (32) инструмента.
15. Устройство по п.12, причем направление, перпендикулярное световому лучу (23), соответствует направлению, перпендикулярному оси (32) инструмента.
16. Устройство по любому из пп.12-15, причем приемник (22) светового барьера (2) приспособлен для того, чтобы создавать сигнал приемника в виде аналогового сигнала напряжения, который пропорционален обнаруженной приемником (22) силе света.
17. Устройство по любому из пп.12-16, причем устройство (13) для приведения режущего инструмента (3) в колебательное движение приспособлено для того, чтобы приводить режущий инструмент (3) в колебательное движение таким образом, что вершина (31) инструмента колеблется внутри светового луча (23).
18. Устройство по любому из пп.12-17, включающее в себя
держатель (11) инструмента для приема режущего инструмента (3);
расположенное в держателе (11) инструмента сенсорное устройство (12) для создания сигнала датчика из колебаний режущего инструмента (3);
устройство (44) для определения частоты колебаний режущего инструмента (3) из сигнала датчика в зависимости от амплитуды колебаний режущего инструмента (3); и
устройство (45) для определения амплитуды колебаний режущего инструмента (3) из сигнала датчика.
19. Устройство по п.18, включающее в себя:
устройство (46) для пошагового варьирования частоты колебаний режущего инструмента (3) и
устройство (47) для согласования амплитуды колебаний режущего инструмента (3) с частотой колебаний, причем
устройство (47) для согласования амплитуды колебаний режущего инструмента (3) с частотой колебаний приспособлено для того, чтобы при каждом шаге с частотой колебаний согласовывать соответствующую амплитуду колебаний режущего инструмента (3).
20. Станок (1), включающий в себя устройство по любому из пп.12-19, причем станок (1) приспособлен для того, чтобы определять амплитуду колебаний режущего инструмента (3) согласно способу по любому из пп.1-11.
| WO 2004056528 A1, 08.07.2004 | |||
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |
| Надувной теплоизоляционный матрац | 1986 |
|
SU1431729A1 |
| JPS 5430880 A, 07.03.1979 | |||
| US 20110209546 A1, 01.09.2011 | |||
| US 20060251480 A1, 09.11.2006 | |||
| US 5218893 A1, 15.06.1993 | |||
| US 4502823 A1, 05.03.1985 | |||
| Интерференционное устройство для измерения перемещений | 1978 |
|
SU679789A1 |
| WO 2004056528 A1, 08.07.2004 | |||
| US 5698120 A1, 16.12.1997 | |||
| US 5212391 A, 18.05.1993 | |||
| US | |||

