Область техники
Изобретение относится к устройству управления и к способу управления для управления динамическим силовым модулем, смонтированным на транспортном средстве, и к устройству управления для системы, в которой внутреннее состояние изменяется во времени.
Уровень техники
При управлении системой, в которой внутреннее состояние изменяется во времени, например, при управлении динамическим силовым модулем транспортного средства, требуется удовлетворять ограничению по состоянию, релевантному для внутреннего состояния системы, для безопасной работы системы. Следовательно, в качестве одной технологии управления, в которой рассматривается ограничение по состоянию, предложена технология, называемая "управляющей функцией Ляпунова - управляющей барьерной функцией - квадратичным программированием (CLF-CBF-QP)". Эта технология минимизирует оценочную функцию, включающую в себя норму ввода, при двух ограничивающих условиях: ограничение на основе управляющей функции Ляпунова с экспоненциальной стабилизацией (ES-CLF) для уничтожения заданной выходной функции и ограничение на основе управляющей барьерной функции (CBF) для хранения внутреннего состояния в инвариантном наборе, удовлетворяющем ограничению по состоянию. В силу этого, получается оптимальный управляющий ввод, удовлетворяющий ограничению по состоянию и достигающий цели управления. CLF-CBF-QP-технология вычисляет управляющий ввод посредством решения задачи квадратичного программирования в каждый момент, без прогнозирования будущего состояния системы, которая представляет собой объект управления, и в силу этого имеет преимущество в виде низких затрат на вычисление.
Дополнительно, в CLF-CBF-QP-технологии, для сдерживания неудовлетворения ограничения по состоянию посредством возмущений в переходе внутреннего состояния системы, которые представляют собой возмущения вследствие ошибки модели системы и т.п., предложено введение CLF-ограничения, в котором рассматриваются возмущения, и CBF-ограничения, в котором рассматриваются возмущения (см., например, "Proposition of CLF-CBF-QP in Which Disturbance is Considered", the 60th Japan Automatic Control Conference, ноябрь 2017 года, и Takano, Yamakita, "CLF-CBF-QP Control Robust against Observed Disturbance", The 5th Multi-symposium on Control Systems, март 2018 года).
Кроме того, для управления системой, может использоваться цифровой процессор, как проиллюстрировано посредством электронного модуля управления, который управляет динамическим силовым модулем транспортного средства. В таком случае, управление системой дискретно выполняется в зависимости от цикла тактового сигнала, с помощью которого активируется процессор. Следовательно, предложена обработка управляющей барьерной функции с дискретным временем (см., например, Ayush Agrawal, Koushil Sreenath, Ayush Agrawal, Koushil Sreenath, "Discrete Control Barrier Functions for Safety-Critical Control of Discrete Systems with Application to Bipedal Robot Navigation", Robotics: Science and Systems 2017, июль 2017 года).
Сущность изобретения
Когда отсутствуют возмущения в системе, подходящие рабочие характеристики управления достигаются в соответствии с CLF-CBF-QP-технологией, посредством технологии, описанной в Ayush Agrawal, Koushil Sreenath, "Discrete Control Barrier Functions for Safety-Critical Control of Discrete Systems with Application to Bipedal Robot Navigation", Robotics: Science and Systems 2017, июль 2017 года. Тем не менее, когда имеются возмущения в системе, как и в случае динамического силового модуля, смонтированного на транспортном средстве, возникает такая проблема, что ограничение по состоянию касательно внутреннего состояния системы не удовлетворяется.
Следовательно, изобретение предоставляет устройство управления и способ управления, которые позволяют сдерживать неудовлетворение ограничения по состоянию касательно внутреннего состояния системы, даже когда устройство управления управляет динамическим силовым модулем, смонтированным на транспортном средстве, с дискретным временем.
Первый аспект изобретения предоставляет устройство управления, которое управляет динамическим силовым модулем транспортного средства для каждого заданного цикла управления. Устройство управления включает в себя процессор. Процессор выполнен с возможностью вычислять оцененное значение доли возмущений в переходе внутреннего состояния динамического силового модуля на основе последнего внутреннего состояния динамического силового модуля и последнего управляющего ввода, посредством которых управляется внутреннее состояние динамического силового модуля, причем доля возмущений представляет собой долю в ограничивающем условном выражении, которая указывает ограничение по состоянию внутреннего состояния динамического силового модуля в данный момент времени. Процессор выполнен с возможностью определять управляющий ввод таким образом, чтобы минимизировать разность относительно опорного значения управляющего ввода, посредством которого внутреннее состояние становится заданным внутренним состоянием, при условии, что сумма оцененного значения доли возмущений и значения ограничивающего условного выражения, когда нет возмущений в данный момент времени, равна или больше значения, получающегося в результате уменьшения последнего значения ограничивающего условного выражения на заданное соотношение. Процессор выполнен с возможностью управлять динамическим силовым модулем в соответствии с определенным управляющим вводом.
В устройстве управления, процессор может быть выполнен с возможностью вычислять оцененное значение доли возмущений в данный момент времени на основе распределения вероятностей, с помощью которого аппроксимируются возмущения, причем распределение вероятностей определяется в соответствии с последним внутренним состоянием и последним управляющим вводом.
В устройстве управления, распределение вероятностей может представлять собой гауссово распределение. Процессор может быть выполнен с возможностью задавать оцененное значение доли возмущений равным значению, получающемуся в результате вычитания значения, полученного посредством умножения дисперсии гауссова распределения на соотношение, соответствующее нижнему пределу заданного доверительного интервала, из среднего гауссова распределения, причем гауссово распределение определяется в соответствии с последним внутренним состоянием и последним управляющим вводом.
В устройстве управления, динамический силовой модуль может представлять собой двигатель. Внутреннее состояние может включать в себя давление в двигателе и температуру в двигателе. Ограничивающее условное выражение может выражать диапазоны давления и температуры, в которых не возникает детонации двигателя.
В устройстве управления, динамический силовой модуль может представлять собой электромотор постоянного тока. Внутреннее состояние может включать в себя угловую скорость ротора электромотора постоянного тока и электрический ток, который протекает через электромотор постоянного тока. Ограничивающее условное выражение может выражать условие, при котором угловая скорость равна или меньше заданной угловой скорости.
Второй аспект изобретения предоставляет способ управления для управления динамическим силовым модулем транспортного средства для каждого заданного цикла управления, причем транспортное средство включает в себя динамический силовой модуль и процессор. Способ управления включает в себя: вычисление, посредством процессора, оцененного значения доли возмущений в переходе внутреннего состояния динамического силового модуля на основе последнего внутреннего состояния динамического силового модуля и последнего управляющего ввода, посредством которых управляется внутреннее состояние динамического силового модуля, причем доля возмущений представляет собой долю в ограничивающем условном выражении, которая указывает ограничение по состоянию внутреннего состояния динамического силового модуля в данный момент времени; определение, посредством процессора, управляющего ввода таким образом, чтобы минимизировать разность относительно опорного значения управляющего ввода, посредством которого внутреннее состояние становится заданным внутренним состоянием, при условии, что сумма оцененного значения доли возмущений и значения ограничивающего условного выражения, когда нет возмущений в данный момент времени, равна или больше значения, получающегося в результате уменьшения последнего значения ограничивающего условного выражения на заданное соотношение; и управление, посредством процессора, динамическим силовым модулем в соответствии с определенным управляющим вводом.
Третий аспект изобретения предоставляет устройство управления, которое управляет системой для каждого заданного цикла управления, причем внутреннее состояние системы изменяется во времени. Устройство управления включает в себя процессор. Процессор выполнен с возможностью вычислять оцененное значение доли возмущений в переходе внутреннего состояния системы на основе последнего внутреннего состояния системы и последнего управляющего ввода, посредством которых управляется внутреннее состояние системы, причем доля возмущений представляет собой долю в ограничивающем условном выражении, которая указывает ограничение по состоянию внутреннего состояния системы в данный момент времени. Процессор выполнен с возможностью определять управляющий ввод таким образом, чтобы минимизировать разность относительно опорного значения управляющего ввода, посредством которого внутреннее состояние становится заданным внутренним состоянием, при условии, что сумма оцененного значения доли возмущений и значения ограничивающего условного выражения, когда нет возмущений в данный момент времени, равна или больше значения, получающегося в результате уменьшения последнего значения ограничивающего условного выражения на заданное соотношение. Процессор выполнен с возможностью управлять системой в соответствии с определенным управляющим вводом.
Вышеуказанная конфигурация предоставляет преимущество обеспечения возможности сдерживать неудовлетворение ограничения по состоянию касательно внутреннего состояния системы, даже когда устройство управления управляет динамическим силовым модулем, смонтированным на транспортном средстве, с дискретным временем.
Краткое описание чертежей
Ниже описываются признаки, преимущества и техническая и промышленная значимость примерных вариантов осуществления изобретения со ссылкой на прилагаемые чертежи, на которых аналогичные номера обозначают аналогичные элементы, и на которых:
Фиг. 1 является схемой аппаратной конфигурации электронного устройства управления согласно первому варианту осуществления устройства управления;
Фиг. 2A является схемой, показывающей примерный переход внутреннего состояния двигателя в первом варианте осуществления, который представляет собой переход, полученный посредством моделирования;
Фиг. 2B является схемой, показывающей примерный переход внутреннего состояния двигателя в первом варианте осуществления, который представляет собой переход, полученный посредством моделирования;
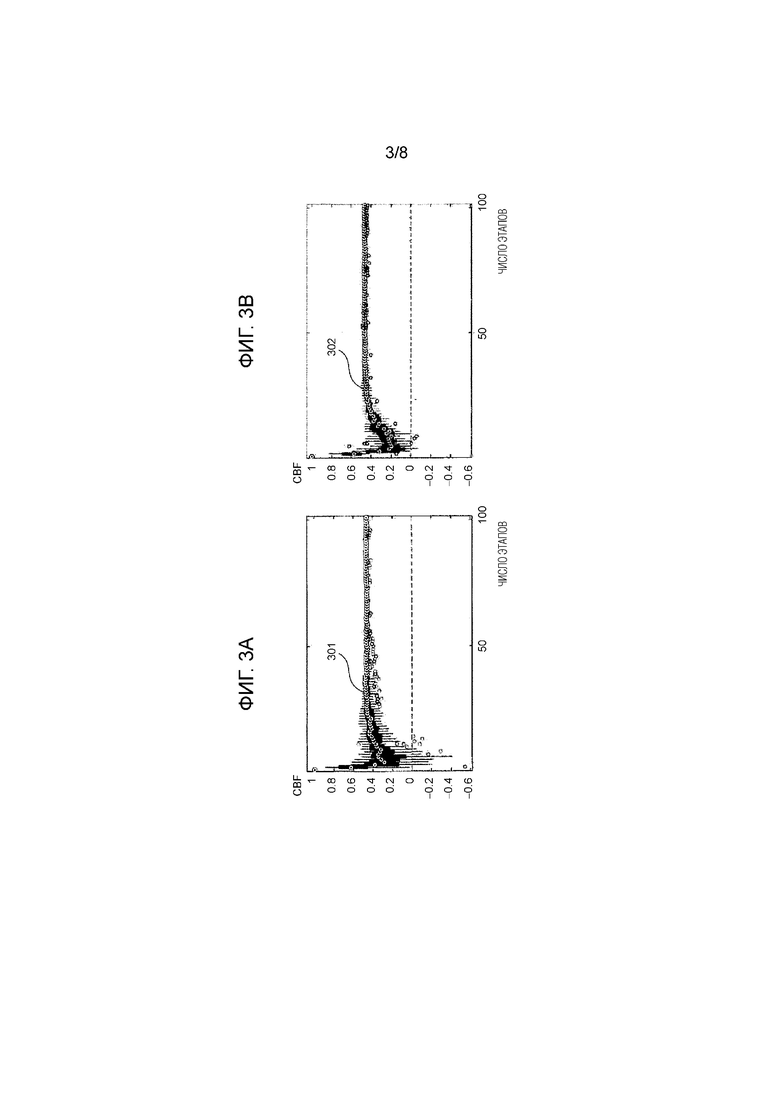
Фиг. 3A является схемой, показывающей временное изменение значения ограничивающего условного выражения для каждого цикла управления в первом варианте осуществления, которое представляет собой временное изменение, полученное посредством моделирования;
Фиг. 3B является схемой, показывающей временное изменение значения ограничивающего условного выражения для каждого цикла управления в первом варианте осуществления, которое представляет собой временное изменение, полученное посредством моделирования;
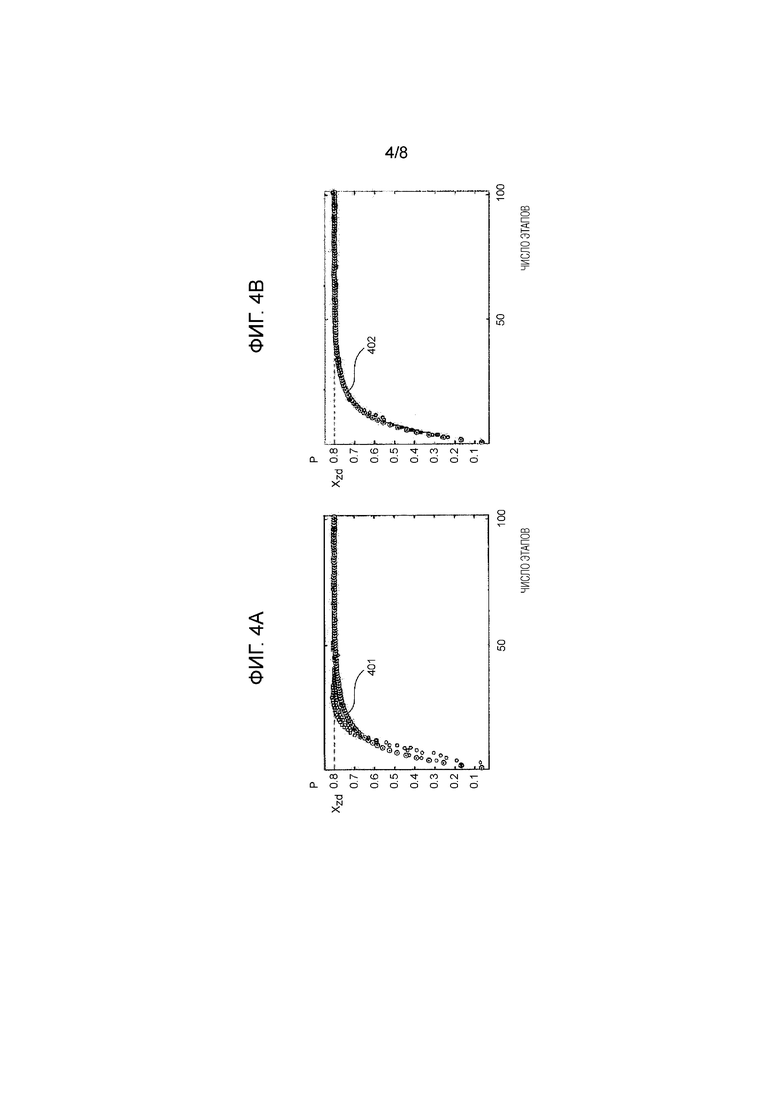
Фиг. 4A является схемой, показывающей временное изменение внутреннего состояния x(2) двигателя для каждого цикла управления в первом варианте осуществления, которое представляет собой временное изменение, полученное посредством моделирования;
Фиг. 4B является схемой, показывающей временное изменение внутреннего состояния x(2) двигателя для каждого цикла управления в первом варианте осуществления, которое представляет собой временное изменение, полученное посредством моделирования;
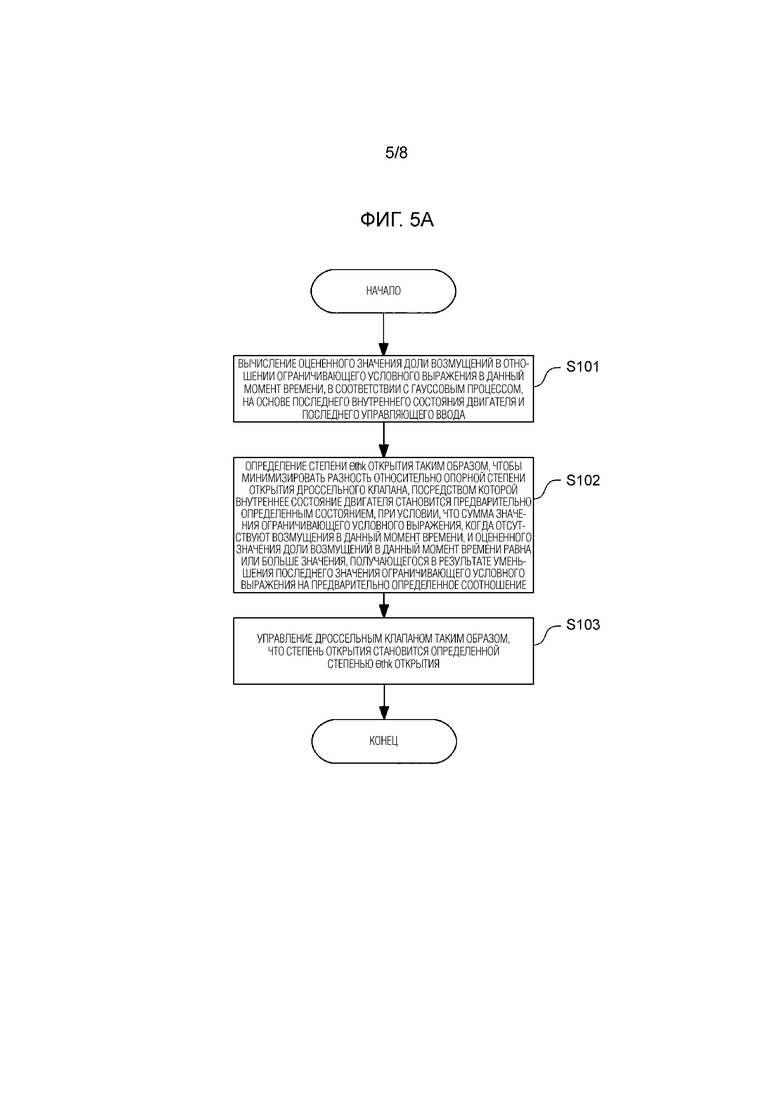
Фиг. 5 является блок-схемой последовательности операций способа для процесса управления;
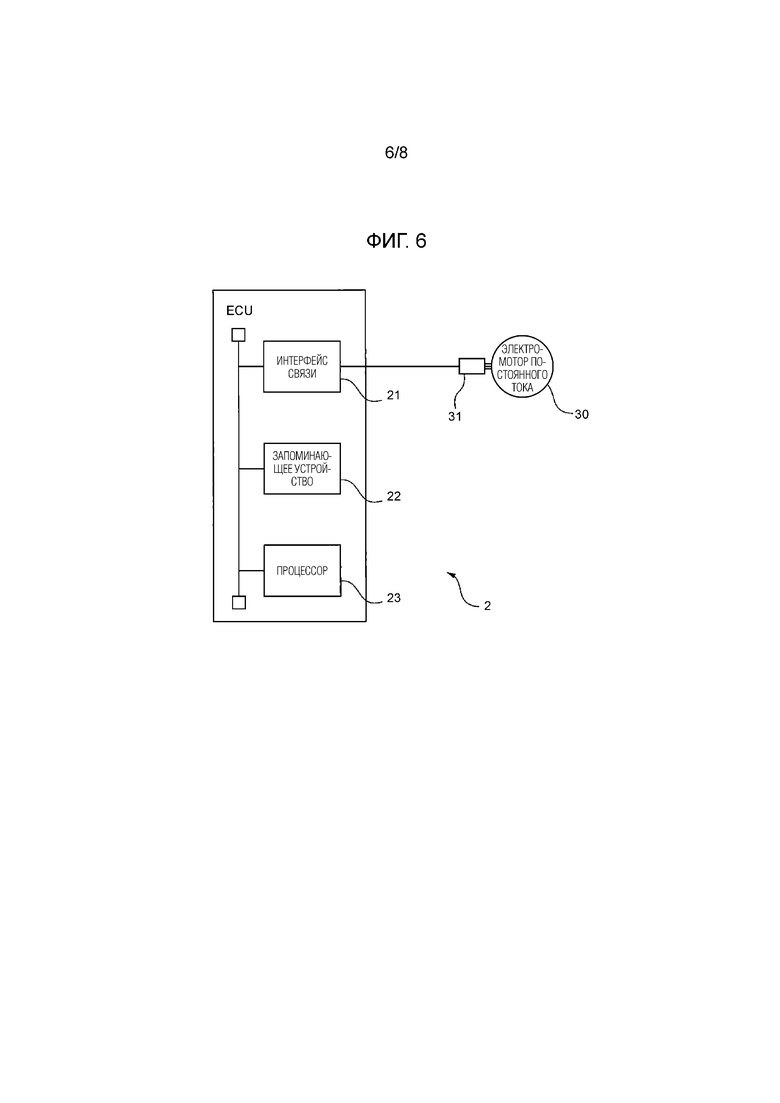
Фиг. 6 является схемой аппаратной конфигурации электронного устройства управления согласно второму варианту осуществления устройства управления;
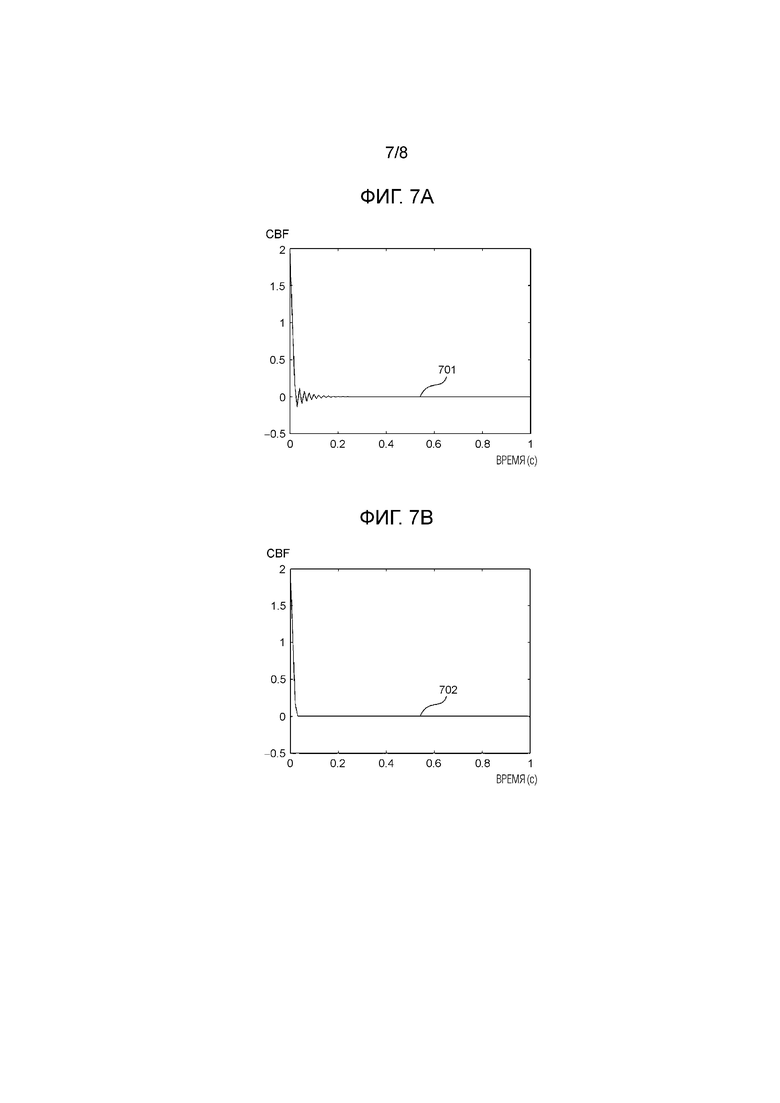
Фиг. 7A является схемой, показывающей временное изменение значения ограничивающего условного выражения B для каждого цикла управления во втором варианте осуществления, которое представляет собой временное изменение, полученное посредством моделирования;
Фиг. 7B является схемой, показывающей временное изменение значения ограничивающего условного выражения B для каждого цикла управления во втором варианте осуществления, которое представляет собой временное изменение, полученное посредством моделирования;
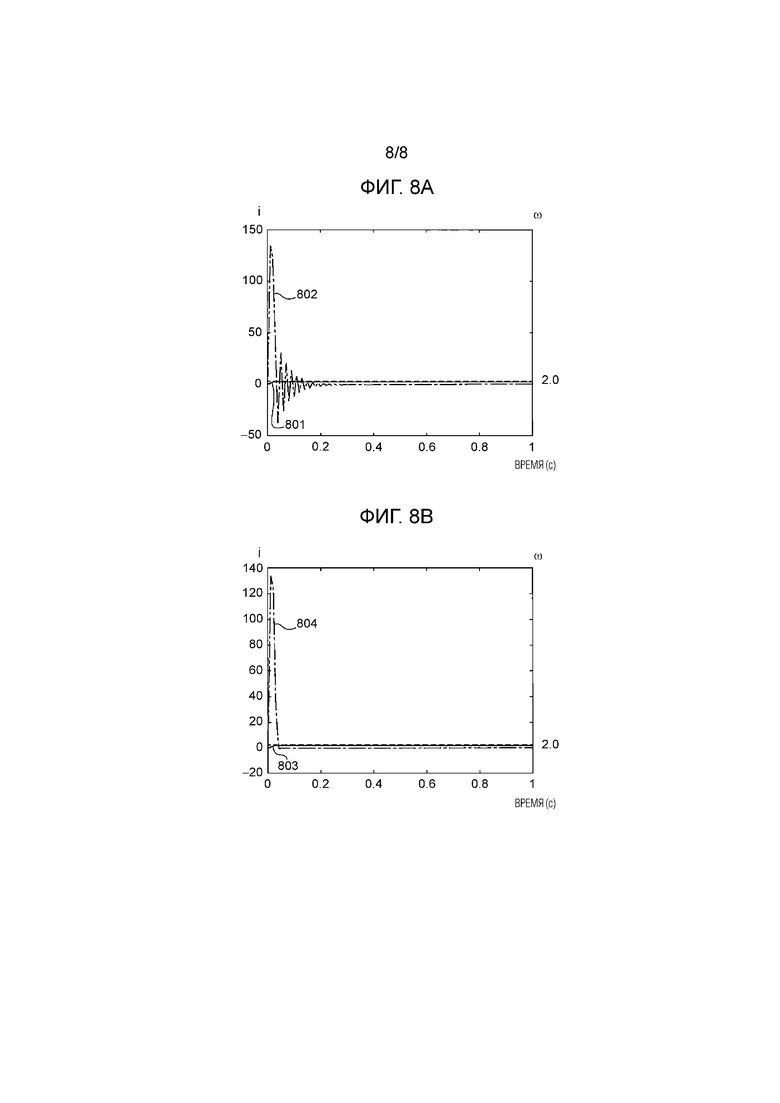
Фиг. 8A является схемой, показывающей временное изменение внутреннего изменения электромотора постоянного тока для каждого цикла управления, которое представляет собой временное изменение, полученное посредством моделирования; и
Фиг. 8B является схемой, показывающей временное изменение внутреннего изменения электромотора постоянного тока для каждого цикла управления, которое представляет собой временное изменение, полученное посредством моделирования.
Подробное описание вариантов осуществления изобретения
В дальнейшем в этом документе, описывается устройство управления для динамического силового модуля, смонтированного на транспортном средстве, со ссылкой на чертежи. Устройство управления управляет динамическим силовым модулем, смонтированным на транспортном средстве, в соответствии со способом решения для нелинейной задачи (CBF-NLP) устойчивой CBF. Динамический силовой модуль представляет собой примерную систему, в которой внутреннее состояние изменяется во времени. В этом случае, устройство управления, для каждого заданного цикла управления, определяет фактический управляющий ввод в динамический силовой модуль, с учетом доли возмущений в переходе внутреннего состояния динамического силового модуля. Доля возмущений представляет собой долю в ограничивающем условном выражении B(x)≥0, в котором внутреннее состояние x динамического силового модуля сохраняется в инвариантном наборе, удовлетворяющем заданному ограничению по состоянию. Внутреннее состояние показывает поведение системы, которое представляет собой объект управления.
Во-первых, описывается условие, релевантное для оценки возмущений и вычисления управляющего ввода. Условие представляет собой условие для получения устойчивости к возмущениям и удовлетворения ограничению по состоянию.
Изменение внутреннего состояния для каждого дискретного времени в системе в качестве объекта управления, например, выражается как следующая формула.
xk+1=f(xk)+g(xk)uk+δk (1)
Здесь, xk является вектором, указывающим внутреннее состояние системы в дискретное время k, и uk является вектором, указывающим управляющий ввод в систему в дискретное время k. Дополнительно, δk является вектором, указывающим возмущения в дискретное время k. Дополнительно, ограничивающее условное выражение Bk (=B(xk)) системы задается таким образом, что оно удовлетворяет следующему условию, так что Bk ограничивающего условного выражения является дискретной экспоненциальной управляющей барьерной функцией (DECBF).
B0≥0
ΔBk+γBk≥0, где ΔBk=Bk+1-Bk, 0<γ≤1
Здесь, γ является усилением, указывающим скорость сходимости.
Ограничивающее условное выражение Bk+1 (=B(xk+1)) в дискретное время (k+1) вычисляется на основе внутреннего состояния xk системы, управляющего ввода uk и возмущений δk в дискретное время k, в соответствии со следующей формулой.
Bk+1=B(f(xk)+g(xk)uk+δk)=Bnk+1+Δk+1 (2)
Здесь, Bnk+1 (=B(f(xk)+g(xk)uk) указывает значение ограничивающего условного выражения в дискретное время (k+1) в идеальном случае, в котором возмущения не включены. Дополнительно, Δk+1 (=Bk+1-Bnk+1) указывает разность между значением ограничивающего условного выражения в случае, если возмущения включены, и значением ограничивающего условного выражения в идеальном случае, в котором возмущения не включены, т.е. долю возмущений в отношении ограничивающего условного выражения. Поскольку доля Δk+1 возмущений является неизвестной, управляющий ввод uk+1 в систему в дискретное время (k+1) определяется таким образом, что удовлетворяется следующая формула.
Bnk+1(xk,uk)+Δpk+1-(1-γ)Bk≥0 (3)
Здесь, Δpk+1 указывает оцененное значение доли Δk+1 возмущений в дискретное время (k+1). Таким образом, управляющий ввод uk+1 определяется таким образом, что сумма значения ограничивающего условного выражения в случае, когда отсутствуют возмущения, и оцененного значения доли возмущений в дискретное время (k+1) (текущее время) равна или больше значения, получающегося в результате уменьшения значения ограничивающего условного выражения в дискретное время k (в последнее время) на заданное соотношение (1-γ).
Далее описывается условие, которое должно удовлетворяться посредством оцененного значения Δpk+1 доли возмущений и фактической доли Δk+1 возмущений. Посредством перезаписи формулы (3) с использованием взаимосвязи Bnk+1=Bk+1-Δk+1, которая извлекается из формулы (2), получается следующая формула.
Bk+1≥(1-γ)Bk-Δek+1 (4)
Здесь, Δek+1 указывает разность (Δpk+1-Δk+1) между оцененным значением Δpk+1 доли возмущений и фактической долей Δk+1 возмущений в дискретное время (k+1). Посредством рекурсивного вычисления формулы (4), получается следующая формула.
Здесь, Δei=Δpi-Δi удовлетворяется.
Следовательно, чтобы ограничение по состоянию Bk+1≥0 удовлетворялось в дискретное время (k+1), требуется удовлетворение следующей формулы.

Поскольку предполагаются B0≥0 и 0<γ≤1, как описано выше, первый элемент левой стороны формулы (6) имеет неотрицательное значение. Следовательно, для удовлетворения ограничению по состоянию, в каждое дискретное время i, требуется удовлетворение следующей формулы (7). Таким образом, в каждое дискретное время i, требуется задавать оцененное значение Δpi доли возмущений таким образом, что оцененное значение Δpi доли возмущений равно или меньше фактической доли Δi возмущений.
Δei=Δpi-Δi≤0 (7)
Для оценки доли возмущений, возмущения аппроксимируются, например, посредством модели с использованием гауссова процесса. В этом случае, аппроксимированное значение Δ*k+1 доли возмущений в дискретное время (k+1) выражается как гауссово распределение, как показано в следующей формуле.

Таким образом, гауссово распределение, выражающее модель возмущений, которая обучена (xk,uk), используется в качестве аппроксимированного значения Δ*k+1 доли возмущений в дискретное время (k+1). Здесь, доля Δk+1 возмущений в дискретное время (k+1) при обучении в отношении гауссова распределения вычисляется как {B(f(xk)+g(xk)uk+δk)-B(f(xk)+g(xk)uk)}, из формулы (2).
Таким образом, когда задается внутреннее состояние xk в дискретное время k, аппроксимированное значение Δ*k+1 доли возмущений выражается как функция управляющего ввода uk в дискретное время k. Как описано выше, требуется задавать оцененное значение Δpi доли возмущений таким образом, что оцененное значение Δpi доли возмущений равно или меньше фактической доли Δi возмущений. Следовательно, оцененное значение Δpk+1 доли возмущений задается на основе среднего μk+1 и дисперсии σk+1 аппроксимированного значения Δ*k+1 доли возмущений. Например, оцененное значение Δpk+1 доли возмущений задается в соответствии со следующей формулой.
Δpk+1(xk,uk)=μk+1-ασk+1 (9)
Здесь, α является значением, соответствующим нижнему пределу доверительного интервала. Например, когда нижний предел доверительного интервала составляет 95%, α=2 удовлетворяется, а когда нижний предел доверительного интервала составляет 68%, α=1 удовлетворяется.
Когда ограничивающее условие в формуле (3) задается так, как описано выше, управляющий ввод u*k в каждое дискретное время k вычисляется при ограничивающем условии таким образом, что разность относительно опорного управляющего ввода urefk в дискретное время k минимизируется, в соответствии со следующей формулой.

Например, опорный управляющий ввод urefk может быть значением управляющего ввода, которое получается посредством выполнения простого пропорционально-интегрального управления таким образом, что внутреннее состояние системы представляет собой требуемое состояние.
Ниже описывается устройство управления согласно первому варианту осуществления. Устройство управления согласно первому варианту осуществления управляет двигателем, смонтированным на транспортном средстве. В этом случае, устройство управления приспосабливает температуру и давление в двигателе в качестве внутреннего состояния и управляет степенью открытия дроссельного клапана, которая представляет собой пример управляющего ввода, для каждого заданного цикла управления, согласно такому ограничению по состоянию, что анормальность, такая как детонация, не возникает в двигателе, т.е. двигатель нормально работает.
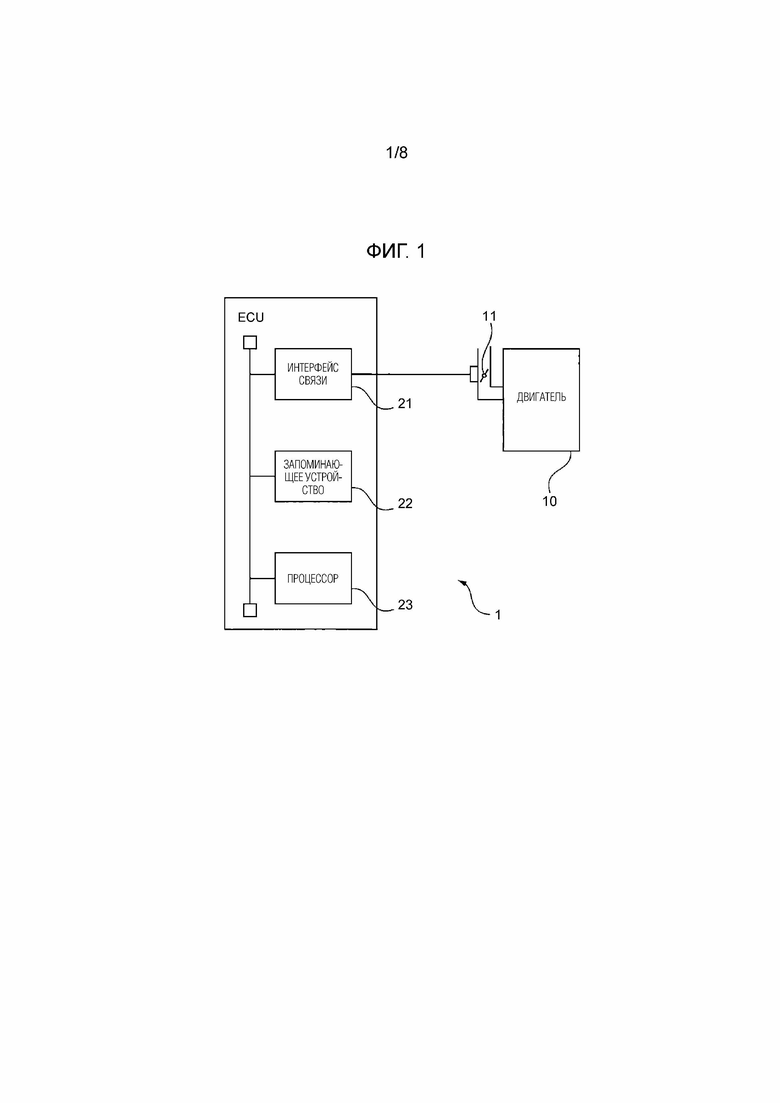
Фиг. 1 является схемой аппаратной конфигурации электронного устройства управления согласно первому варианту осуществления устройства управления. В варианте осуществления, электронное устройство 1 управления (ECU) управляет двигателем 10, смонтированным на транспортном средстве, и дроссельным клапаном 11 для регулирования впуска воздуха в двигатель 10, и включает в себя интерфейс 21 связи, запоминающее устройство 22 и процессор 23.
Интерфейс 21 связи представляет собой примерное устройство связи и включает в себя интерфейсную схему для соединения с ECU 1 с бортовой сетью (не проиллюстрирована). Дополнительно, интерфейс 21 связи принимает сигналы датчиков из различных датчиков, смонтированных на транспортном средстве, и передает принятые сигналы датчиков в процессор 23. Примеры сигналов датчиков включают в себя сигналы датчиков, указывающие давление и температуру в камере сгорания двигателя 10 и рабочую величину нажатия педали акселератора. Когда интерфейс 21 связи принимает, из процессора 23, управляющий сигнал в актуатор (не проиллюстрирован), который приводит в действие дроссельный клапан 11, интерфейс 21 связи выводит управляющий сигнал в актуатор.
Запоминающее устройство 22 представляет собой примерное устройство хранения данных и, например, включает в себя энергозависимое полупроводниковое запоминающее устройство и энергонезависимое полупроводниковое запоминающее устройство. Дополнительно, запоминающее устройство 22 сохраняет множество данных, которые должны использоваться в процессах управления, которые выполняются посредством процессора 23, и, например, сохраняет различные параметры для идентификации ограничивающего условного выражения, параметры, указывающие внутреннее состояние двигателя 10, и параметры, указывающие переход внутреннего состояния.
Процессор 23 представляет собой примерное устройство управления и включает в себя один или множество центральных процессоров (CPU) и периферийных схем. Процессор 23 дополнительно может включать в себя другую функциональную схему, такую как логическое функциональное устройство или арифметико-логическое устройство. Процессор 23 управляет степенью открытия дроссельного клапана 11 двигателя 10 для каждого заданного цикла управления, соответствующего циклу синхросигнала, который подается в процессор 23.
В варианте осуществления, для указания температуры и давления в двигателе 10, вектор xk, указывающий внутреннее состояние двигателя 10, включает в себя два элемента (xk(1), xk(2)). Температура Tk и давление Pk двигателя 10 в дискретное время k выражаются как Tk=xk(2)/xk(1) и Pk=x(2), соответственно. В этом случае, из формулы (1), дискретное изменение внутреннего состояния двигателя 10 выражается как следующая формула.
Здесь, θi (i=1, 2, 3, 4) является константой, и θthk является степенью открытия (0°≤ θthk≤90°) дроссельного клапана 11 в дискретное время k. Следовательно, для управляющего ввода uk, 0≤ uk≤1 удовлетворяется. Дополнительно, Δt является циклом управления.
Для упрощения обработки посредством линеаризации управляющего ввода, модуль uk управления преобразуется в переменную vk, как показано в следующей формуле.

В этом случае, формула (11) выражается как следующая формула.

Здесь, возмущения δk выражаются как гауссов шум N (μ, ∑). В качестве примера, μ=[-2*10-3, 2*10-3]T и ∑=(5*10-3)I удовлетворяются. Здесь, μ и ∑ определяются, например, посредством моделирований или экспериментов, в зависимости от конструкции двигателя 10 в качестве объекта управления и т.п. Дополнительно, формула (10) преобразуется в следующую формулу.

В варианте осуществления, ограничивающее условное выражение (управляющая барьерная функция, CBF), посредством которого двигатель 10 нормально работает без возникновения анормальности, такой как детонация, выражается как следующая формула.

Здесь, α и β являются константами и задаются равными, например, α=1,1 и β=0,3.
Следовательно, для каждого цикла управления, процессор 23 вычисляет vk в соответствии с формулой (14), так что ограничивающее условное выражение, показанное посредством формулы (15), удовлетворяет условию, показанному посредством формулы (3). В это время, процессор 23 задает оцененное значение доли возмущений, в соответствии с формулой (9). В этом случае, процессор 23 оценивает состояния xk(1), xk(2) на основе давления и температуры двигателя 10 в последнем цикле управления, которые представляют собой давление и температуру, определенные посредством датчиков. Дополнительно, процессор 23 указывает опорный управляющий ввод uref, в качестве значения управляющего ввода, которое вычисляется посредством выполнения простого пропорционально-интегрального управления таким образом, что состояние xk(2), т.е. давление P в двигателе 10 составляет требуемое значение x2d (например, 0,8). Например, усиление Kp для пропорционального термина задается равным 5, и усиление KI для интегрального члена задается равным 0,3. Процессор 23 определяет требуемое значение x2d давления P, в зависимости от принимаемой рабочей величины нажатия педали акселератора, посредством обращения к справочной таблице, указывающей взаимосвязь между рабочей величиной нажатия педали акселератора и требуемым значением x2d. Справочная таблица сохраняется в запоминающем устройстве 22 заранее. Затем процессор 23 вычисляет степень θthk открытия дроссельного клапана 11 на основе вычисленного vk, формулы (11) и формулы (12).
Каждый раз, когда процессор 23 вычисляет степень θthk открытия дроссельного клапана 11, процессор 23 выводит управляющий сигнал для регулирования степени открытия дроссельного клапана 11 до вычисленной степени θthk открытия в актуатор (не проиллюстрирован), который приводит в действие дроссельный клапан 11, через интерфейс 21 связи.
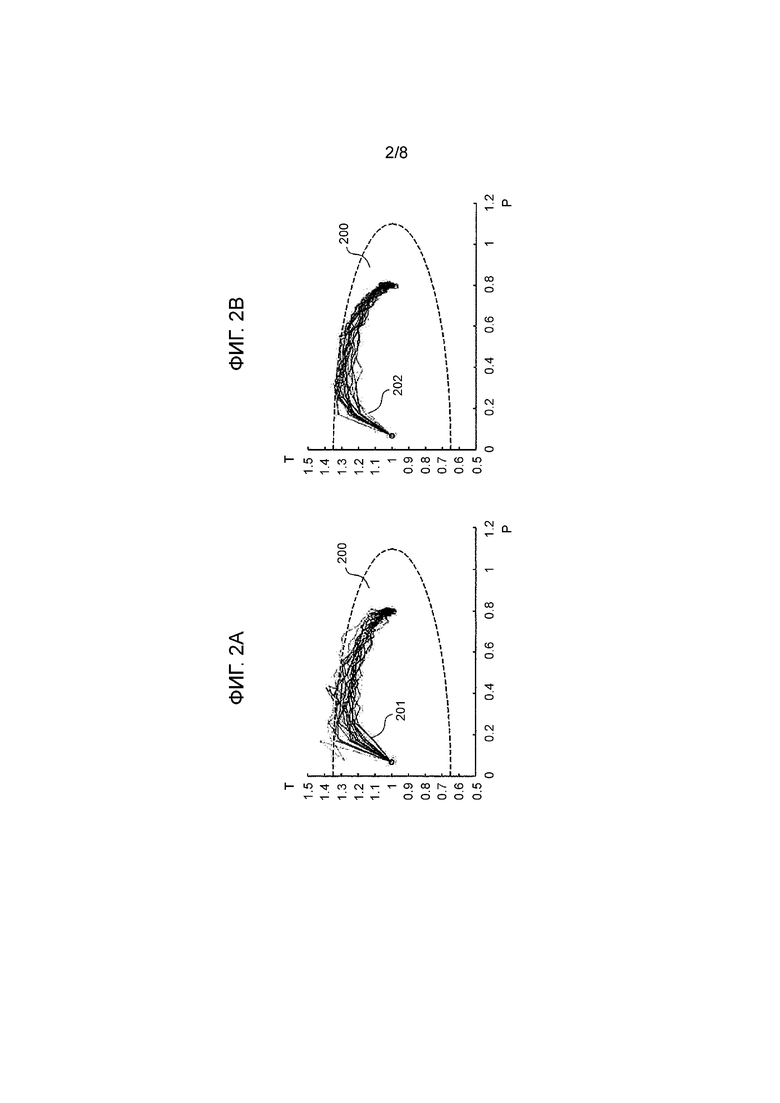
Фиг. 2A и фиг. 2B являются схемами, показывающими примерные переходы внутреннего состояния двигателя 10, которые представляют собой переходы, полученные посредством моделирований. Фиг. 2A показывает результат моделирования, когда оцененное значение доли возмущений равно нулю, в качестве сравнительного примера. Фиг. 2B показывает результат моделирования, когда оцененное значение доли возмущений задается в соответствии с формулой (9) (коэффициент α=2), и усиление γ в формуле (3) равно 0,8. На каждом из фиг. 2A и фиг. 2B, ось абсциссы указывает давление, и ось ординат указывает температуру. Дополнительно, область 200, обведенная посредством пунктирной линии, показывает область (B≥0), в которой удовлетворяется ограничение по состоянию, показанное посредством формулы (15). Дополнительно, на фиг. 2A, местоположение 201 точек показывает переход внутреннего состояния двигателя 10, который представляет собой переход, полученный посредством моделирования. Аналогично, на фиг. 2B, местоположение 201 точек показывает переход внутреннего состояния двигателя 10, который представляет собой переход, полученный посредством моделирования.
Фиг. 3A и фиг. 3B являются схемами, показывающими временные изменения значения ограничивающего условного выражения B, показанного посредством формулы (15) для каждого цикла управления, которые представляют собой временные изменения, полученные посредством моделирований. Фиг. 3A показывает результат моделирования, когда оцененное значение доли возмущений равно нулю, в качестве сравнительного примера. Фиг. 3B показывает результат моделирования, когда оцененное значение доли возмущений задается в соответствии с формулой (9) (коэффициент α=2), и усиление γ в формуле (3) равно 0,8. На каждом из фиг. 3A и фиг. 3B, ось абсциссы указывает число этапов (т.е. истекшее время на основе цикла управления), и ось ординат указывает значение ограничивающего условного выражения B. Дополнительно, на фиг. 3A, местоположение 301 точек показывает временное изменение значения ограничивающего условного выражения B, которое представляет собой временное изменение, полученное посредством моделирования. Аналогично, на фиг. 3B, местоположение 302 точек показывает временное изменение значения ограничивающего условного выражения B, которое представляет собой временное изменение, полученное посредством моделирования.
Фиг. 4A и фиг. 4B являются схемами, показывающими временные изменения внутреннего состояния x(2) двигателя 10 для каждого цикла управления, т.е. давления P, которые представляют собой временные изменения, полученные посредством моделирований. Фиг. 4A показывает результат моделирования, когда оцененное значение доли возмущений равно нулю, в качестве сравнительного примера. Фиг. 4B показывает результат моделирования, когда оцененное значение доли возмущений задается в соответствии с формулой (9) (коэффициент α=2), и усиление γ в формуле (3) равно 0,8. На каждом из фиг. 4A и фиг. 4B, ось абсциссы указывает число этапов, и ось ординат указывает значение внутреннего состояния x(2). Дополнительно, на фиг. 4A, местоположение 401 точек показывает временное изменение значения внутреннего состояния x(2), которое представляет собой временное изменение, полученное посредством моделирования. Аналогично, на фиг. 4B, местоположение 402 точек показывает временное изменение значения внутреннего состояния x(2), которое представляет собой временное изменение, полученное посредством моделирования.
Как показано на фиг. 2A, фиг. 2B, фиг. 3A и фиг. 3B, обнаружено, что число раз, когда значение ограничивающего условного выражения B становится отрицательным, т.е. число раз, когда ограничение по состоянию не удовлетворяется, снижается посредством учета влияния возмущений в ограничивающем условном выражении, по сравнению со сравнительным примером. Дополнительно, как показано на фиг. 4A и фиг. 4B, обнаружено, что внутреннее состояние x(2) сходится на целевом значении более надлежащим образом по сравнению со сравнительным примером.
Фиг. 5 является блок-схемой последовательности операций способа для процесса управления, который выполняется посредством процессора 23. Процессор 23 выполняет процесс управления для каждого цикла управления, в соответствии с блок-схемой последовательности операций способа, показанной на фиг. 5.
Процессор 23 вычисляет оцененное значение доли возмущений в отношении ограничивающего условного выражения касательно внутреннего состояния двигателя 10 в данный момент времени, в соответствии с гауссовым процессом на основе последнего внутреннего состояния (температуры и давления) двигателя 10 и последнего управляющего ввода (степени открытия дроссельного клапана 11) (этап S101).
Процессор 23 определяет степень θthk открытия дроссельного клапана 11 таким образом, чтобы минимизировать разность относительно степени θthk открытия дроссельного клапана 11, посредством которой внутреннее состояние двигателя 10 становится заданным состоянием, при условии, что сумма значения ограничивающего условного выражения, когда отсутствуют возмущения в данный момент времени, и оцененного значения доли возмущений в данный момент времени равна или больше значения, получающегося в результате уменьшения последнего значения ограничивающего условного выражения на заданное соотношение (этап S102). Процессор 23 выводит управляющий сигнал для управления дроссельным клапаном 11 таким образом, что степень открытия становится определенной степенью θthk открытия дроссельного клапана 11, в актуатор (не проиллюстрирован), который приводит в действие дроссельный клапан 11 (этап S103). Затем процессор 23 завершает процесс управления.
Как описано выше, когда устройство управления согласно первому варианту осуществления управляет двигателем для каждого цикла управления, устройство управления устанавливает условие, которое должно удовлетворяться посредством ограничивающего условного выражения касательно внутреннего состояния двигателя, с учетом возмущений в переходе внутреннего состояния двигателя и оценивает оцененное значение доли возмущений таким образом, что условие удовлетворяется. Затем устройство управления определяет управляющий ввод при условии, которое должно удовлетворяться посредством ограничивающего условного выражения. В силу этого, устройство управления позволяет сдерживать неудовлетворение ограничения по состоянию касательно внутреннего состояния двигателя, даже когда устройство управления управляет двигателем с дискретным временем.
Далее описывается устройство управления согласно второму варианту осуществления. Устройство управления согласно второму варианту осуществления управляет электромотором постоянного тока, который представляет собой другой пример динамического силового модуля, смонтированного на транспортном средстве. В этом случае, устройство управления управляет напряжением, которое должно прикладываться к электромотору постоянного тока, согласно такому ограничению по состоянию, что угловая скорость электромотора постоянного тока равна или меньше заданной угловой скорости.
Фиг. 6 является схемой аппаратной конфигурации электронного устройства управления согласно второму варианту осуществления устройства управления. В варианте осуществления, электронное устройство 2 управления (ECU) управляет электромотором 30 постоянного тока, смонтированном на транспортном средстве, и включает в себя интерфейс 21 связи, запоминающее устройство 22 и процессор 23. ECU 2 согласно второму варианту осуществления отличается от ECU 1 согласно первому варианту осуществления по процессу управления, который должен выполняться посредством процессора 23. Далее описывается процесс управления, который должен выполняться посредством процессора 23. Что касается других составляющих элементов ECU 2, следует обратиться к описаниям соответствующих составляющих элементов ECU 1 согласно первому варианту осуществления.
Во-первых, описывается уравнение состояния электромотора 30 постоянного тока в качестве объекта управления и ограничение по состоянию, которое должно применяться. В варианте осуществления, уравнение состояния электромотора 30 постоянного тока в качестве объекта управления выражается как следующее выражение.

Здесь, ω представляет угловую скорость ротора электромотора 30 постоянного тока, и i представляет электрический ток, который протекает через электромотор 30 постоянного тока. Дополнительно, v представляет напряжение, которое подается в электромотор 30 постоянного тока. B является константой, указывающей коэффициент внутреннего трения ротора электромотора 30 постоянного тока, и J является константой, указывающей инерцию электромотора 30 постоянного тока и нагрузки, которая должна приводиться в действие посредством электромотора 30 постоянного тока. Дополнительно, KT является константой крутящего момента электромотора 30 постоянного тока, и Kb является константой наведенной электродвижущей силы электромотора 30 постоянного тока. Кроме того, L является индуктивностью катушки электромотора 30 постоянного тока, и R является сопротивлением схемы электромотора 30 постоянного тока. Как показано в формуле (16), внутреннее состояние электромотора 30 постоянного тока выражается посредством угловой скорости ω и электрического тока i, и управляющий ввод представляет собой напряжение v. Процессор 23, для каждого цикла управления, может принимать сигнал датчика, указывающий угловую скорость ω, и сигнал датчика, указывающий электрический ток i, из датчика угловой скорости (не проиллюстрирован) и амперметра (не проиллюстрирован), которые предоставляются в электромоторе 30 постоянного тока, через интерфейс 21 связи.
Посредством дискретизации формулы (16) с использованием цикла T управления, получается следующая формула.

Здесь, xk является вектором, указывающим внутреннее состояние, в котором элемент xk(1) является угловой скоростью ωk в дискретное время k, и элемент xk(2) является электрическим током ik. Дополнительно, управляющий ввод uk указывает напряжение vk в дискретное время k.
Следовательно, изменение состояния электромотора 30 постоянного тока для каждого цикла управления выражается как следующая формула, с учетом возмущений δ(xk,uk), аналогично формуле (1).
xk+1=Adxk+Bduk+δk(xk,uk) (18)
Например, возмущения δ(xk,uk) приблизительно выражаются как гауссово распределение, аналогично первому варианту осуществления. Следовательно, доля Δk+1 возмущений в дискретное время (k+1) при обучении в отношении гауссова распределения вычисляется как {-Cδk(xk,)}, аналогично вышеуказанному.
В варианте осуществления, процессор 23 управляет напряжением vk, которое должно прикладываться к электромотору 30 постоянного тока таким образом, что угловая скорость ωk составляет требуемое значение ωd угловой скорости, согласно такому ограничению по состоянию, что угловая скорость ωk равна или меньше требуемого значения ωd. Например, процессор 23 определяет требуемое значение ωd посредством обращения к справочной таблице, указывающей взаимосвязь между рабочей величиной нажатия педали акселератора транспортного средства, принимаемой через интерфейс 21 связи, и требуемым значением ωd. Например, справочная таблица заранее сохраняется в запоминающем устройстве 22.
Таким образом, в варианте осуществления, ограничивающее условное выражение Bk выражается как следующая формула.
Bk:=ωd-ωk=ωd-Cxk≥0 (19)
C:=[1 0]
Следовательно, ограничивающее условие в дискретное время (k+1) выражается как следующая формула.
Bk+1=ωd-ωk+1=ωd-C(Adxk+Bduk+δk(xk,uk))
=ωd-C(Adxk+Bduk)-Cδk(xk,uk) (20)
Bnk+1:=ωd-C(Adxk+Bduk), Δk+1:=-Cδk(xk,uk)
Соответственно, аналогично формуле (3), когда оцененное значение доли возмущений составляет Δpk+1, требуется удовлетворять следующему условию для ограничивающего условия.
Bnk+1(xk,uk)+Δpk+1-(1-γ)Bk≥0 (21)
Аналогично первому варианту осуществления, процессор 23 аппроксимирует возмущения в соответствии с гауссовым процессом и в силу этого может вычислять оцененное значение Δpk+1 доли возмущений в соответствии с формулой (9).
Как описано выше, для каждого цикла управления, процессор 23 оценивает управляющий ввод uk таким образом, чтобы минимизировать разность относительно опорного управляющего ввода uref в соответствии с формулой (10), при удовлетворении формулы (21). В этом случае, процессор 23 использует, в качестве xk, угловую скорость и значение электрического тока в последнем цикле управления, которые определяются посредством датчика угловой скорости и амперметра. Аналогично первому варианту осуществления, процессор 23 указывает опорный управляющий ввод uref, в качестве значения управляющего ввода, которое вычисляется посредством выполнения простого пропорционально-интегрального управления таким образом, что угловая скорость ω ротора электромотора 30 постоянного тока составляет требуемое значение ωd. Затем процессор 23 управляет схемой 31 приведения в действие, которая подает напряжение в электромотор 30 постоянного тока таким образом, что напряжение v, которое должно прикладываться к электромотору 30 постоянного тока, составляет значение vk напряжения, соответствующее оцененному управляющему вводу uk.
Фиг. 7A и фиг. 7B являются схемами, показывающими временные изменения значения ограничивающего условного выражения B, показанного посредством формулы (20) для каждого цикла управления, которые представляют собой временные изменения, полученные посредством моделирований. Фиг. 7A показывает результат моделирования, когда оцененное значение доли возмущений равно нулю, в качестве сравнительного примера. Фиг. 7B показывает результат моделирования, когда оцененное значение доли возмущений задается в соответствии с формулой (9) (коэффициент α=2), и усиление γ в формуле (3) равно 1,0. На каждом из фиг. 7A и фиг. 7B, ось абсциссы указывает истекшее время, и ось ординат указывает значение ограничивающего условного выражения B. Дополнительно, на фиг. 7A, местоположение 701 точек указывает временное изменение значения ограничивающего условного выражения B, которое представляет собой временное изменение, полученное посредством моделирования. Аналогично, на фиг. 7B, местоположение 702 точек указывает временное изменение значения ограничивающего условного выражения B, которое представляет собой временное изменение, полученное посредством моделирования.
Фиг. 8A и фиг. 8B являются схемами, показывающими временные изменения внутреннего состояния электромотора 30 постоянного тока для каждого цикла управления, т.е. угловой скорости ω и электрического тока i, которые представляют собой временные изменения, полученные посредством моделирований. Фиг. 8A показывает результат моделирования, когда оцененное значение доли возмущений равно нулю, в качестве сравнительного примера. Фиг. 8B показывает результат моделирования, когда оцененное значение доли возмущений задается в соответствии с формулой (9) (коэффициент α=2), и усиление γ в формуле (3) равно 1,0. На каждом из фиг. 8A и фиг. 8B, ось абсциссы указывает истекшее время, и оси ординат указывают значения угловой скорости ω (правая сторона) и электрического тока i (левая сторона). Дополнительно, на фиг. 8A, местоположение 801 точек и местоположение 802 точек показывают временное изменение значения угловой скорости ω и временное изменение значения электрического тока i, соответственно. Эти временные изменения получаются посредством моделирований. Аналогично, на фиг. 8B, местоположение 803 точек и местоположение 804 точек показывают временное изменение значения угловой скорости ω и временное изменение значения электрического тока i, соответственно. Эти временные изменения получаются посредством моделирований.
В моделировании, цикл T управления задан равным 50 мс. Дополнительно, абсолютные величины погрешностей моделирования для инерции J, сопротивления R и коэффициента внутреннего трения ротора составляют 0,5 J, 1,1 R и 0,8 B, соответственно. Требуемое значение ωd угловой скорости составляет 2,0. При обучении в отношении модели возмущений, требуемое значение ωd угловой скорости составляет (sin5t+1). Кроме того, следующая формула использована в качестве пропорционального плюс интеграл выражения для вычисления опорного управляющего ввода uref.
urefk=-10 (ωk-ωd)-4∑(ωk-ωd) (22)
Как показано на фиг. 7A и фиг. 7B, обнаружено, что число раз, когда значение ограничивающего условного выражения B становится отрицательным, т.е. число раз, когда ограничивающее условие не удовлетворяется, снижается посредством учета влияния возмущений в ограничивающем условном выражении, по сравнению со сравнительным примером. Дополнительно, как показано на фиг. 8A и фиг. 8B, обнаружено, что угловая скорость ω сходится на целевом значении ωd за меньшее время по сравнению со сравнительным примером. Кроме того, обнаружено, что электрический ток i также сходится за меньшее время.
Как описано выше, устройство управления согласно второму варианту осуществления также позволяет сдерживать неудовлетворение ограничивающего условия касательно внутреннего состояния электромотора постоянного тока, даже когда устройство управления управляет электромотором постоянного тока с дискретным временем.
В вышеописанных вариантах осуществления, процессор 23 может использовать распределение вероятностей, отличное от гауссова распределения, для аппроксимации возмущений внутреннего состояния системы в качестве объекта управления. Например, процессор 23 может аппроксимировать возмущения с использованием пуассоновского распределения. В этом случае, аналогично вышеописанным вариантам осуществления, среднее пуассоновского распределения в данный момент времени определяется на основе внутреннего состояния системы и управляющего ввода в последнем цикле управления. Дополнительно, оцененное значение доли возмущений вычисляется в соответствии с формулой (9).
Устройство управления может использоваться для управления системой, которая отличается от динамического силового модуля, смонтированного на транспортном средстве, и в котором внутреннее состояние изменяется во времени. Также в этом случае, для каждого цикла управления, процессор устройства управления вычисляет управляющий ввод таким образом, чтобы минимизировать разность относительно опорного управляющего ввода в соответствии с формулой (10) при ограничивающем условии в формуле (3). В этом случае, процессор вычисляет оцененное значение доли возмущений в соответствии с формулой (9) на основе распределения вероятностей, с помощью которого аппроксимируются возмущения.
Кроме того, аналогично вышеописанным вариантам осуществления, для каждого цикла управления, процессор определяет значение опорного управляющего ввода посредством выполнения пропорционально-интегрального управления таким образом, что внутреннее состояние системы в качестве объекта управления представляет собой требуемое состояние. Альтернативно, процессор может определять значение опорного управляющего ввода, в соответствии с PID-управлением.
Таким образом, в пределах объема изобретения, специалисты в данной области техники могут вносить различные модификации в зависимости от способа, которым осуществляется изобретение.
Изобретение относится к устройству управления и к способу управления для управления динамическим силовым модулем, смонтированным на транспортном средстве, и к устройству управления для системы, в которой внутреннее состояние изменяется во времени. Техническим результатом является предоставление устройства управления и способа управления, которые позволяют сдерживать неудовлетворение ограничения по состоянию касательно внутреннего состояния системы, даже когда устройство управления управляет динамическим силовым модулем, смонтированным на транспортном средстве, с дискретным временем. Результат достигается тем, что устройство управления включает в себя процессор, выполненный с возможностью вычислять оцененное значение доли возмущений в переходе внутреннего состояния динамического силового модуля на основе последнего внутреннего состояния и последнего управляющего ввода, посредством которых управляется внутреннее состояние, определять управляющий ввод таким образом, чтобы минимизировать разность относительно опорного значения управляющего ввода, посредством которого внутреннее состояние становится заданным внутренним состоянием, при условии, что сумма оцененного значения доли и значения ограничивающего условного выражения, когда нет возмущений в данный момент времени, равна или больше значения, получающегося в результате уменьшения последнего значения ограничивающего условного выражения на заданное соотношение, и управлять динамическим силовым модулем в соответствии с определенным управляющим вводом. 3 н. и 4 з.п. ф-лы, 13 ил.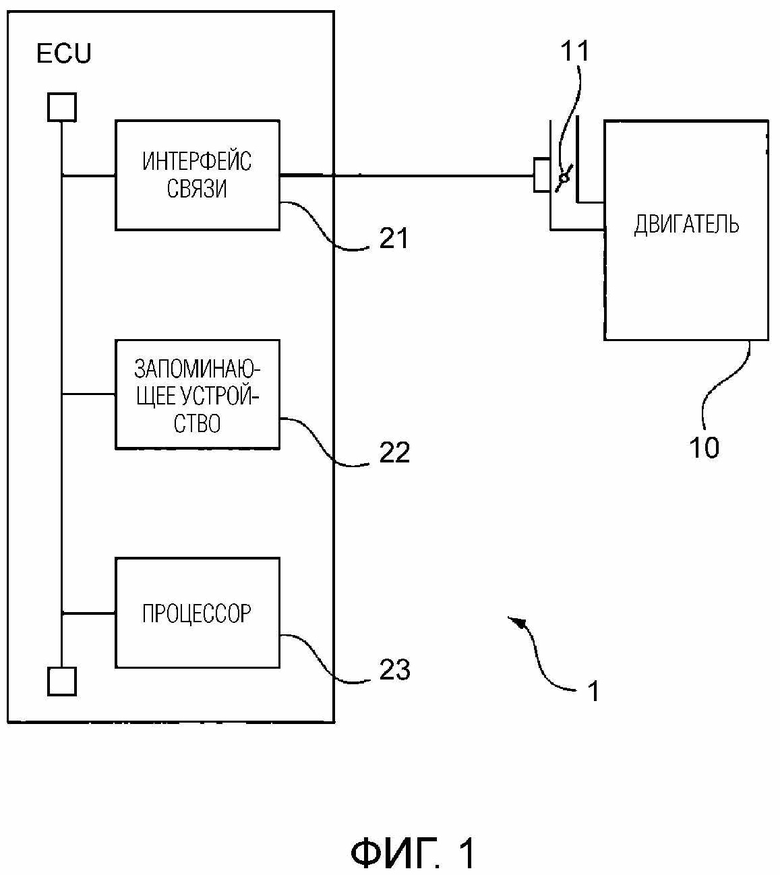
1. Устройство управления, которое управляет динамическим силовым модулем транспортного средства для каждого заданного цикла управления, при этом устройство управления содержит процессор, выполненный с возможностью
вычисления оцененного значения доли возмущений в переходе внутреннего состояния динамического силового модуля на основе последнего внутреннего состояния динамического силового модуля и последнего управляющего ввода, посредством которых управляется внутреннее состояние динамического силового модуля, причем доля возмущений представляет собой долю в ограничивающем условном выражении, которая указывает ограничение по состоянию внутреннего состояния динамического силового модуля в данный момент времени;
определения управляющего ввода таким образом, чтобы минимизировать разность относительно опорного значения управляющего ввода, посредством которого внутреннее состояние становится заданным внутренним состоянием, при условии, что сумма оцененного значения доли возмущений и значения ограничивающего условного выражения, когда нет возмущений в данный момент времени, равна или больше значения, получающегося в результате уменьшения последнего значения ограничивающего условного выражения на заданное соотношение; и
управления динамическим силовым модулем в соответствии с определенным управляющим вводом.
2. Устройство управления по п. 1, в котором процессор выполнен с возможностью вычисления оцененного значения доли возмущений в данный момент времени на основе распределения вероятностей, с помощью которого аппроксимируются возмущения, причем распределение вероятностей определяется в соответствии с последним внутренним состоянием и последним управляющим вводом.
3. Устройство управления по п. 2, в котором
распределение вероятностей представляет собой гауссово распределение; и
процессор выполнен с возможностью задания оцененного значения доли возмущений равным значению, получающемуся в результате вычитания значения, полученного посредством умножения дисперсии гауссова распределения на соотношение, соответствующее нижнему пределу заданного доверительного интервала, из среднего гауссова распределения, причем гауссово распределение определяется в соответствии с последним внутренним состоянием и последним управляющим вводом.
4. Устройство управления по любому из пп. 1-3, в котором
динамический силовой модуль представляет собой двигатель;
внутреннее состояние включает в себя давление в двигателе и температуру в двигателе; и
ограничивающее условное выражение выражает диапазоны давления и температуры, в которых не возникает детонации двигателя.
5. Устройство управления по любому из пп. 1-3, в котором
динамический силовой модуль представляет собой электромотор постоянного тока;
внутреннее состояние включает в себя угловую скорость ротора электромотора постоянного тока и электрический ток, который протекает через электромотор постоянного тока; и
ограничивающее условное выражение выражает условие, при котором угловая скорость равна или меньше заданной угловой скорости.
6. Способ управления для управления динамическим силовым модулем транспортного средства для каждого заданного цикла управления, причем транспортное средство включает в себя динамический силовой модуль и процессор, при этом способ управления включает этапы, на которых
вычисляют посредством процессора оцененное значение доли возмущений в переходе внутреннего состояния динамического силового модуля на основе последнего внутреннего состояния динамического силового модуля и последнего управляющего ввода, посредством которых управляется внутреннее состояние динамического силового модуля, причем доля возмущений представляет собой долю в ограничивающем условном выражении, которая указывает ограничение по состоянию внутреннего состояния динамического силового модуля в данный момент времени;
определяют посредством процессора управляющий ввод таким образом, чтобы минимизировать разность относительно опорного значения управляющего ввода, посредством которого внутреннее состояние становится заданным внутренним состоянием, при условии, что сумма оцененного значения доли возмущений и значения ограничивающего условного выражения, когда нет возмущений в данный момент времени, равна или больше значения, получающегося в результате уменьшения последнего значения ограничивающего условного выражения на заданное соотношение; и
управляют посредством процессора динамическим силовым модулем в соответствии с определенным управляющим вводом.
7. Устройство управления, которое управляет системой для каждого заданного цикла управления, причем внутреннее состояние системы изменяется во времени, при этом устройство управления содержит процессор, выполненный с возможностью
вычисления оцененного значения доли возмущений в переходе внутреннего состояния системы на основе последнего внутреннего состояния системы и последнего управляющего ввода, посредством которых управляется внутреннее состояние системы, причем доля возмущений представляет собой долю в ограничивающем условном выражении, которая указывает ограничение по состоянию внутреннего состояния системы в данный момент времени;
определения управляющего ввода таким образом, чтобы минимизировать разность относительно опорного значения управляющего ввода, посредством которого внутреннее состояние становится заданным внутренним состоянием, при условии, что сумма оцененного значения доли возмущений и значения ограничивающего условного выражения, когда нет возмущений в данный момент времени, равна или больше значения, получающегося в результате уменьшения последнего значения ограничивающего условного выражения на заданное соотношение; и
управления системой в соответствии с определенным управляющим вводом.
| Способ дренирования полого органа | 1984 |
|
SU1215672A1 |
| KR 20090042276 A, 2009.04.29 | |||
| US 6336063 B1, 2002.01.01 | |||
| Автомат для сборки и сварки | 1982 |
|
SU1073040A1 |
| WO 2014061083 A1, 2014.04.24 | |||
| JPH 08232731 A, 1996.09.10 | |||
| CN 104265472 A, 2015.01.07 | |||
| JP 2014176181 A, 2014.09.22 | |||
| RU 2007120157 A, 2008.01.27. | |||

