Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к способу управления и к устройству управления транспортным средством для замедления посредством рекуперативного торможения мотора, соединенного с ведущим валом ведущих колес.
Уровень техники
[0002] JP2002-152916A описывает транспортное средство, выполненное с возможностью уменьшения крутильной вибрации ведущего вала, обусловленной изменением крутящего момента мотора, посредством передачи по каналу обратной связи, в качестве крутильной скорости ведущего вала, разности между значением, полученным посредством преобразования частоты вращения мотора транспортного средства в частоту вращения ведущего колеса, и средней скоростью вращения ведущего колеса.
Раскрытие изобретения
[0003] Вышеприведенная система трансмиссии для передачи движущей силы транспортного средства выполнена с возможностью передачи мощности мотора на ведущие колеса через промежуточный элемент в виде редукторной передачи. Следовательно, ускорение транспортного средства из замедленного состояния либо его замедление из ускоренного состояния проходит через участок мертвой зоны, на котором крутящий момент мотора не передается на ведущий вал вследствие бокового зазора в шестернях.
[0004] Согласно технологии, в которой разность между значением, полученным посредством преобразования частоты вращения мотора в скорость вращения ведущих колес, и средней скоростью вращения ведущего колеса возвращается, как описано выше, крутящий момент мотора увеличивается по мере того, как темп изменения частоты вращения мотора увеличивается. Как результат, в случае если транспортное средство ускоряется или замедляется, крутящий момент мотора увеличивается на участке мертвой зоны, за счет этого приводя к вероятности возникновения шума или вибрации в то время, когда шестерни вводятся зацепление друг с другом.
[0005] Настоящее изобретение реализовано с целью преодоления недостатков, описанных выше, и задача изобретения состоит в создании способа управления транспортным средством и устройства управления транспортного средства, которые подавляют шум или вибрацию, вызываемую посредством перехода участка мертвой зоны системы трансмиссии для передачи движущей силы, при одновременном уменьшении крутильной вибрации ведущего вала.
[0006] Согласно аспекту этого изобретения, способ управления транспортным средством для замедления посредством рекуперативного торможения мотора, соединенного с ведущим валом ведущего колеса, включает в себя этап вычисления для вычисления значения команды управления крутящим моментом для подавления компонента вибрации ведущего вала посредством воздействия по каналу обратной связи угловой скорости кручения ведущего вала на требуемый крутящий момент, который определяет мощность мотора. Способ управления транспортным средством включает в себя этап оценки для оценки участка мертвой зоны, на котором крутящий момент мотора в транспортном средстве не передается на ведущий вал, на основании требуемого крутящего момента, этап ограничения для ограничения значения команды управления крутящим моментом в случае, если транспортное средство оценивается как находящееся на участке мертвой зоны, и этап управления для управления работой мотора на основании значения команды управления крутящим моментом.
Краткое описание чертежей
[0007] Фиг. 1 является схемой конфигурации, иллюстрирующей пример конфигурации транспортного средства в первом варианте осуществления настоящего изобретения;
Фиг. 2 является блок-схемой, иллюстрирующей пример процедуры обработки, связанной со способом управления для управления транспортным средством;
Фиг. 3 является концептуальной схемой, иллюстрирующей взаимосвязь между степенью открытия педали акселератора, предусмотренной в транспортном средстве, и крутящим моментом мотора;
Фиг. 4 является блок-схемой, иллюстрирующей пример функциональной конфигурации устройства управления в настоящем варианте осуществления;
Фиг. 5 является блок-схемой, иллюстрирующей пример модуля F/B-вычисления угловой скорости кручения, который вычисляет значение команды управления крутящим моментом посредством воздействия по каналу обратной связи угловой скорости кручения ведущего вала на требуемый крутящий момент мотора;
Фиг. 6 является блок-схемой, иллюстрирующей пример модуля оценки участков мертвой зоны, который оценивает, предусмотрен ли участок мертвой зоны, на котором крутящий момент мотора не передается в крутящий момент ведущего вала;
Фиг. 7A является пояснительной схемой, иллюстрирующей модель транспортного средства;
Фиг. 7B является видом сбоку транспортного средства, проиллюстрированного на фиг. 7A;
Фиг. 8 представляет пояснительные схемы, иллюстрирующие рабочие состояния транспортного средства, когда транспортное средство ускоряется из замедленного состояния в настоящем варианте осуществления;
Фиг. 9 представляет сравнительные схемы, иллюстрирующие рабочее состояние транспортного средства в случае, если значение команды управления крутящим моментом не ограничено;
Фиг. 10 является блок-схемой, иллюстрирующей другой пример модуля F/B-вычисления в настоящем варианте осуществления;
Фиг. 11 является блок-схемой, иллюстрирующей пример модуля F/B-вычисления угловой скорости кручения во втором варианте осуществления настоящего изобретения;
Фиг. 12 является блок-схемой, иллюстрирующей пример модуля оценки участков мертвой зоны в настоящем варианте осуществления;
Фиг. 13 является блок-схемой, иллюстрирующей пример процедуры обработки, связанной со способом управления для электрического транспортного средства в настоящем варианте осуществления;
Фиг. 12 является схемой, иллюстрирующей взаимосвязь между темпом временного изменения требуемого крутящего момента и значением команды управления крутящим моментом на участке мертвой зоны в настоящем варианте осуществления;
Фиг. 15 представляет временные диаграммы, иллюстрирующие изменения значения команды управления крутящим моментом на участке мертвой зоны для каждого темпа временного изменения требуемого крутящего момента;
Фиг. 16 является блок-схемой, иллюстрирующей пример функциональной конфигурации устройства управления в третьем варианте осуществления настоящего изобретения;
Фиг. 17 является блок-схемой, иллюстрирующей пример модуля F/F-компенсации угловой скорости кручения, который выполняет вычисление с прямой связью значения команды управления крутящим моментом мотора и оцененного значения угловой скорости вращения мотора на основании требуемого крутящего момента мотора;
Фиг. 18 является блок-схемой, иллюстрирующей пример модуля F/B-компенсации разности, который компенсирует крутящий момент мотора на основании оцененного значения и обнаруженного значения угловой скорости вращения мотора и разности между ними; и
Фиг. 19 является блок-схемой, иллюстрирующей другой пример модуля F/F-компенсации угловой скорости кручения в настоящем варианте осуществления.
Осуществление изобретения
[0008] Ниже описаны варианты осуществления настоящего изобретения со ссылкой на прилагаемые чертежи.
[0009] Первый вариант осуществления
Фиг. 1 является блок-схемой, иллюстрирующей главные составляющие компоненты электрического транспортного средства, содержащего устройство управления транспортного средства согласно первому варианту осуществления настоящего изобретения.
[0010] Транспортное средство согласно настоящему варианту осуществления имеет электромотор 4, соединенный с ведущим валом 8 ведущих колес 9a и 9b через редукторную передачу 5, и замедляется посредством рекуперативной тормозной силы электромотора 4 под управлением контроллера 2 электромотора, который представляет собой устройство управления. В дальнейшем в этом документе, редукторная передача 5 и ведущий вал 8 вплоть до ведущих колес 9a и 9b от электромотора 4 будут упоминаться как система трансмиссии для передачи движущей силы.
[0011] Транспортное средство согласно настоящему варианту осуществления включает в себя электрическое транспортное средство, которое имеет электрическую мощность, подаваемую из аккумулятора 1, который представляет собой источник мощности, в электромотор 4 через промежуточный элемент в виде инвертора 3, и использует мощность электромотора 4, вырабатываемую посредством электрической мощности, чтобы за счет этого приводить в движение транспортное средство. Электрическое транспортное средство означает автомобиль, который имеет электромотор 4 в качестве части или всего источника приведения в движение транспортного средства и допускает движение посредством движущей силы электромотора 4, и включает в себя гибридный автомобиль и автомобиль на топливных элементах в дополнение к электромобилю.
[0012] Сигналы, которые указывают состояние транспортного средства, включающие в себя скорость V транспортного средства, положение θ акселератора (степень открытия акселератора), фазу α ротора электромотора 4 и токи iu, iv и iw электромотора 4, вводятся в контроллер 2 электромотора, и входные сигналы преобразуются в цифровые сигналы. На основании преобразованных сигналов, контроллер 2 электромотора формирует PWM-сигналы для управления электромотором 4 и формирует сигналы приведения в действие инвертора 3 согласно сформированным PWM-сигналам.
[0013] Инвертор 3 имеет, например, два переключающих элемента (например, силовые полупроводниковые элементы, такие как IGBT или MOSFET) для каждой фазы. Инвертор 3 включает/отключает переключающий элемент в ответ на сигнал приведения в действие, чтобы за счет этого преобразовывать постоянный ток, подаваемый из аккумулятора 1, в переменный ток, и подает требуемый ток в электромотор 4.
[0014] Электромотор 4 (трехфазный мотор переменного тока) формирует движущую силу из переменного тока, подаваемого из инвертора 3, и передает движущую силу на левое и правое ведущие колеса 9a, 9b через промежуточные элементы в виде редукторной передачи 5 и ведущего вала 8. Кроме того, электромотор 4 формирует рекуперативную движущую силу при вращении посредством вращающих сил ведущих колес 9a, 9b в то время, когда транспортное средство движется. В это время, инвертор 3 преобразует переменный ток, сформированный, когда электромотор 4 находится в режиме работы в рекуперативном режиме, в постоянный ток и подает постоянный ток в аккумулятор 1. Таким образом, энергия движения транспортного средства восстанавливается в качестве электрической энергии.
[0015] Датчик 6 вращения, например, представляет собой датчик кругового положения или датчик положения и обнаруживает фазу α ротора электромотора 4.
[0016] Датчик 7 тока обнаруживает трехфазные переменные токи iu, iv и iw, проходящие через электромотор 4. Тем не менее, сумма трехфазных переменных токов iu, iv и iw равна нулю, так что токи двух произвольных фаз могут обнаруживаться, и ток оставшейся одной фазы может определяться посредством вычисления.
[0017] Датчики 91 и 92 скорости вращения колес предусмотрены на ведущих колесах 9a и 9b, соответственно. Датчики 91 и 92 скорости вращения колес обнаруживают углы вращения (рад) ведущих колес.
[0018] Фиг. 2 является блок-схемой, иллюстрирующей процедуру обработки способа управления, осуществляемого посредством контроллера 2 электромотора.
[0019] На этапе S201, контроллер 2 электромотора получает сигналы, которые указывают состояния транспортного средства. Согласно настоящему варианту осуществления, в качестве сигналов, которые указывают состояния транспортного средства, скорость V транспортного средства (км/ч), положение θ акселератора (%), фаза α ротора (рад) электромотора 4, частота Nm вращения (об/мин) электромотора 4, угловая скорость ω (рад/с) ротора, токи iu, iv и iw электромотора 4, угловая скорость ωw вращения ведущих колес и значение Vdc постоянного напряжения (В) аккумулятора 1 вводятся в контроллер 2 электромотора.
[0020] Скорость V транспортного средства (км/ч) получается через связь из датчика скорости транспортного средства, который не проиллюстрирован, либо из тормозного контроллера или других контроллеров, которые не проиллюстрированы. В качестве альтернативы, значение, полученное посредством умножения угловой скорости ωm вращения мотора, которая представляет собой механическую угловую скорость электромотора 4, на динамический радиус R шины, делится на передаточное отношение главной передачи, чтобы за счет этого определять скорость v транспортного средства (м/с). Затем определенная скорость v транспортного средства (м/с) может умножаться на 3600/1000, чтобы выполнять преобразование единиц измерения, чтобы за счет этого определять скорость V транспортного средства (км/ч).
[0021] Положение θ акселератора (%) получается из датчика положения акселератора, который не проиллюстрирован. В качестве альтернативы, положение θ акселератора (%) получается через связь из контроллера транспортного средства или другого контроллера, который не проиллюстрирован.
[0022] Фаза α ротора (рад) электромотора 4 получается из датчика 6 вращения. Относительно частоты Nm вращения (об/мин) электромотора 4, угловая скорость ω (электрический угол) ротора делится на число полюсных пар электромотора 4, чтобы определять угловую скорость ωm вращения электромотора (рад/с), и угловая скорость ωm вращения электромотора умножается на 60/(2π), чтобы определять частоту Nm вращения (об/мин) электромотора 4. Угловая скорость ω (рад/с) ротора определяется посредством дифференцирования фазы α ротора.
[0023] Токи iu, iv и iw (А) электромотора 4 получаются из датчика 7 тока.
[0024] Угловая скорость ωw вращения ведущих колес (рад/с) вычисляется посредством дифференцирования среднего значения значений, обнаруженных датчиками 91 и 92 скорости вращения колес.
[0025] Значение Vdc постоянного напряжения (В) определяется с использованием значения питающего напряжения, передаваемого из датчика напряжения (не проиллюстрирован), предусмотренного на линии источника мощности постоянного тока между аккумулятором 1 и инвертором 3, либо из контроллера аккумулятора, который не проиллюстрирован.
[0026] На этапе S202, контроллер 2 электромотора задает значение Tmt* команды управления требуемым крутящим моментом, указывающее требуемый крутящий момент (требуемое значение крутящего момента) электромотора 4. Другими словами, контроллер 2 электромотора вычисляет требуемое значение крутящего момента, которое обеспечивает базис. Контроллер 2 электромотора в настоящем варианте осуществления задает значение Tmt* команды управления требуемым крутящим моментом на основании положения θ акселератора и скорости V транспортного средства, которые введены на этапе S201, посредством обращения к предварительно установленной таблице сравнения положений акселератора с крутящими моментами. Далее поясняется таблица сравнения положений акселератора с крутящими моментами.
[0027] На этапе S203, контроллер 2 электромотора вычисляет значение Tmt* команды управления требуемым крутящим моментом и угловую скорость ωm вращения мотора и задает значение Tmf* команды управления конечным крутящим моментом, которое должно подавлять вибрацию системы трансмиссии для передачи движущей силы (к примеру, крутильную вибрацию ведущего вала 8), без ухудшения отклика крутящего момента ведущего вала. Ниже подробно описан способ задания значения Tmf* команды управления конечным крутящим моментом.
[0028] На этапе S204, контроллер 2 электромотора определяет требуемое значение id* тока d-оси и требуемое значение iq* тока q-оси на основании значения Tmf* команды управления конечным крутящим моментом и угловой скорости ωm вращения мотора, которые заданы на этапе S203, и значения Vdc постоянного напряжения.
[0029] На этапе S205, контроллер 2 электромотора выполняет управление по току для согласования тока id d-оси и тока iq q-оси с требуемым значением id* тока d-оси и требуемым значением iq* тока q-оси, которые определены на этапе S204.
[0030] Например, контроллер 2 электромотора сначала определяет ток id d-оси и ток iq q-оси на основании значений iu, iv и iw трехфазного переменного тока, которые введены на этапе S201, и фазы α ротора электромотора 4. Затем, контроллер 2 электромотора вычисляет значения vd и vq команд управления напряжением d-оси и q-оси из разностей между значениями id* и iq* команд управления током d-оси и q-оси и токами id и iq d-оси и q-оси.
[0031] Затем, контроллер 2 электромотора определяет значения vu, vv и vw команд управления трехфазным переменным напряжением из значений vd и vq команд управления напряжением d-оси и q-оси и фазы α ротора электромотора 4. После этого, контроллер 2 электромотора определяет PWM-сигналы tu (%), tv (%) и tw (%) из значений vu, vv и vw команд управления трехфазным переменным напряжением и значения Vdc постоянного напряжения, которые определены.
[0032] Переключающие элементы инвертора 3 открываются или закрываются в ответ на PWM-сигналы tu, tv и tw, определенные так, как описано выше, в силу этого приводя в действие электромотор 4 с требуемым крутящим моментом, указываемым посредством значения команды управления крутящим моментом.
[0033] Фиг. 3 является концептуальной схемой, иллюстрирующей пример таблицы сравнения положений акселератора с крутящими моментами, используемой для задания значения Tmt* команды управления требуемым крутящим моментом.
[0034] Как проиллюстрировано на фиг. 3, взаимосвязь между угловой скоростью ωm вращения мотора и значением Tmt* команды управления требуемым крутящим моментом задается для каждого положения акселератора. В настоящем варианте осуществления, значение Tmt* команды управления требуемым крутящим моментом увеличивается к отрицательной (минус) стороне по мере того, как положение акселератора приближается к нулю, таким образом, что транспортное средство замедляется посредством рекуперативной тормозной силы электромотора 4. Следовательно, когда водитель отпускает педаль акселератора, транспортное средство замедляется и останавливается.
[0035] Фиг. 4 является блок-схемой, иллюстрирующей пример функциональной конфигурации модуля 200 вычисления для управления демпфированием вибрации в контроллере 2 электромотора.
[0036] Модуль 200 вычисления для управления демпфированием вибрации представляет собой блок управления, который задает значение Tmf* команды управления конечным крутящим моментом на основании значения Tmt* команды управления требуемым крутящим моментом таким образом, что вибрация транспортного средства подавляется.
[0037] Модуль 200 вычисления для управления демпфированием вибрации включает в себя преобразователь 11 значений для ведущего вала, модуль 12 вычисления угловой скорости кручения, модуль 20 оценки участков мертвой зоны и модуль 30 F/B-вычисления угловой скорости кручения.
[0038] Преобразователь 11 значений для ведущего вала делит угловую скорость ωm вращения мотора на полное передаточное отношение N, чтобы за счет этого определять значение, преобразованное в угловую скорость вращения ведущего вала.
[0039] Модуль 12 вычисления угловой скорости кручения вычисляет, в качестве угловой скорости ωd кручения ведущего вала, разность между угловой скоростью ωw вращения ведущих колес и значением преобразования, выводимым из преобразователя 11 значений для ведущего вала.
[0040] Модуль 20 оценки участков мертвой зоны оценивает участок мертвой зоны транспортного средства на основании значения Tmt* команды управления требуемым крутящим моментом. Участок мертвой зоны транспортного средства в этом случае означает конкретный участок, на котором крутящий момент, сформированный в электромоторе 4, не передается в крутящий момент ведущего вала 8.
[0041] Согласно настоящему варианту осуществления, значение Tmt* команды управления требуемым крутящим моментом вводится в модуль 20 оценки участков мертвой зоны, и модуль 20 оценки участков мертвой зоны оценивает угол кручения ведущего вала 8 посредством использования значения Tmt* команды управления требуемым крутящим моментом. Модуль 20 оценки участков мертвой зоны выводит оцененное значение ωdˆ угла кручения ведущего вала, которое указывает оцененное значение, в модуль 30 F/B-вычисления угловой скорости кручения в качестве сигнала S определения для определения того, находится ли система трансмиссии для передачи движущей силы транспортного средства на участке мертвой зоны.
[0042] Модуль 30 F/B-вычисления угловой скорости кручения возвращает угловую скорость кручения ведущего вала 8 к значению Tmt* команды управления требуемым крутящим моментом, чтобы за счет этого вычислять значение Tmf* команды управления конечным крутящим моментом для подавления компонента крутильной вибрации, обусловленного ведущим валом 8. Кроме того, если оценивается то, что система трансмиссии для передачи движущей силы находится на участке мертвой зоны, то модуль 30 F/B-вычисления угловой скорости кручения ограничивает значение Tmf* команды управления конечным крутящим моментом.
[0043] Согласно настоящему варианту осуществления, значение Tmt* команды управления требуемым крутящим моментом и оцененное значение θdˆ угла кручения ведущего вала вводятся в модуль 30 F/B-вычисления угловой скорости кручения. Затем модуль 30 F/B-вычисления угловой скорости кручения вычисляет значение Tmf* команды управления конечным крутящим моментом посредством использования значения Tmt* команды управления требуемым крутящим моментом. Одновременно, модуль 30 F/B-вычисления угловой скорости кручения определяет то, находится ли крутящий момент, сформированный в электромоторе 4, на участке мертвой зоны, на основании оцененного значения θdˆ угла кручения ведущего вала. Если определяется то, что крутящий момент находится на участке мертвой зоны, то модуль 30 F/B-вычисления угловой скорости кручения корректирует значение Tmf* команды управления конечным крутящим моментом таким образом, что абсолютное значение значения Tmf* команды управления конечным крутящим моментом уменьшается.
[0044] Уменьшение абсолютного значения для значения Tmf* команды управления конечным крутящим моментом на участке мертвой зоны, как описано выше, уменьшает темп относительного изменения между шестернями при боковом зазоре в редукторной передаче 5, в силу этого позволяя подавлять возникновение вибрации или шума, вызываемого посредством столкновения между шестернями.
[0045] Фиг. 5 является блок-схемой, иллюстрирующей пример функциональной конфигурации модуля 30 F/B-вычисления угловой скорости кручения.
[0046] Модуль 30 F/B-вычисления угловой скорости кручения включает в себя умножители 31 и 32 усилений, переключатель 33 усиления, модуль 34 компенсации кручения, ограничитель 35 крутящего момента и переключатель 36 крутящего момента.
[0047] Умножитель 31 усилений хранит первое усиление k1 обратной связи (FB), заданное на участке зоны, отличной от вышеприведенного участка мертвой зоны. Первое FB-усиление k1 составляет заданное значение, которое определяется посредством коэффициента ζr1 вязкости отклика модели на участке зоны, отличном от участка мертвой зоны.
[0048] Умножитель 31 усилений вычисляет величину компенсации угла кручения посредством умножения угловой скорости ωd кручения ведущего вала из модуля 12 вычисления угловой скорости кручения на первое FB-усиление k1. Умножитель 31 усилений выводит вычисленную величину компенсации угла кручения в переключатель 33 усиления.
[0049] Умножитель 32 усилений хранит второе FB-усиление k2, заданное на участке мертвой зоны системы трансмиссии для передачи движущей силы. Второе FB-усиление k2 составляет заданное значение, которое определяется посредством коэффициента ζr2 вязкости отклика модели на участке мертвой зоны. Согласно настоящему варианту осуществления, второе FB-усиление k2 задается равным значению, которое меньше первого FB-усиления k1. Это уменьшает силу для уменьшения кручения ведущего вала 8, т.е. силу в направлении, которое является противоположным относительно направления вращения ведущего вала 8 таким образом, что скорость отклика транспортного средства на участке мертвой зоны может увеличиваться.
[0050] Умножитель 32 усилений вычисляет величину компенсации угла кручения посредством умножения угловой скорости ωd кручения ведущего вала из модуля 12 вычисления угловой скорости кручения на второе FB-усиление k2. Умножитель 32 усилений выводит вычисленную величину компенсации угла кручения в переключатель 33 усиления.
[0051] Переключатель 33 усиления переключает величину компенсации угла кручения на величину компенсации угла кручения любого из умножителей 31 или 32 усилений, в зависимости от того, находится ли крутящий момент электромотора 4 на участке мертвой зоны.
[0052] В настоящем варианте осуществления, переключатель 33 усиления выводит величину компенсации угла кручения одного из умножителей 31 и 32 усилений согласно оцененному значению θdˆ угла кручения ведущего вала 8. Конкретно, если оцененное значение θdˆ угла кручения ведущего вала 8 является ненулевым, т.е. если крутящий момент электромотора 4 не находится на участке мертвой зоны, то переключатель 33 усиления выводит величину компенсации угла кручения из умножителя 31 усилений в модуль 34 компенсации кручения.
[0053] С другой стороны, если оцененное значение θdˆ угла кручения ведущего вала 8 равно нулю, т.е. если крутящий момент электромотора 4 находится на участке мертвой зоны, то переключатель 33 усиления выводит величину компенсации угла кручения из умножителя 32 усилений в модуль 34 компенсации кручения.
[0054] Модуль 34 компенсации кручения корректирует значение Tmt* команды управления требуемым крутящим моментом таким образом, что кручение ведущего вала 8 компенсируется. Модуль 34 компенсации кручения вычитает величину компенсации угла кручения из переключателя 33 усиления из значения Tmt* команды управления требуемым крутящим моментом, чтобы вычислять значение Tmf* команды управления конечным крутящим моментом. Модуль 34 компенсации кручения выводит значение Tmf* команды управления конечным крутящим моментом в переключатель 36 крутящего момента и ограничитель 35 крутящего момента.
[0055] Ограничитель 35 крутящего момента ограничивает абсолютное значение значения Tmf* команды управления конечным крутящим моментом из модуля 34 компенсации кручения. Другими словами, ограничитель 35 крутящего момента ограничивает значение Tmf* команды управления конечным крутящим моментом значением в заданном допустимом диапазоне. Допустимый диапазон определяется посредством проведения экспериментов, моделирований и т.п. таким образом, что шумы и вибрации, вызываемые посредством боковых зазоров, подавляются.
[0056] Например, в случае если транспортное средство ускоряется из замедленного состояния, значение Tmf* команды управления конечным крутящим моментом увеличивается. В этой ситуации, если значение Tmf* команды управления конечным крутящим моментом увеличивается таким образом, что оно превышает верхнее предельное значение допустимого диапазона, то ограничитель 35 крутящего момента задает значение Tmf* команды управления конечным крутящим моментом равным верхнему предельному значению допустимого диапазона.
[0057] С другой стороны, в случае если транспортное средство замедляется из ускоренного состояния, значение Tmf* команды управления конечным крутящим моментом уменьшается. В этой ситуации, если значение Tmf* команды управления конечным крутящим моментом уменьшается таким образом, что оно меньше нижнего предельного значения допустимого диапазона, то ограничитель 35 крутящего момента задает значение Tmf* команды управления конечным крутящим моментом равным нижнему предельному значению допустимого диапазона.
[0058] Ограничитель 35 крутящего момента выводит ограниченное значение Tmf* команды управления конечным крутящим моментом в переключатель 36 крутящего момента.
[0059] Переключатель 36 крутящего момента переключает значение Tmf* команды управления конечным крутящим моментом на значение одного из модуля 34 компенсации кручения или ограничителя 35 крутящего момента, в зависимости от того, находится ли крутящий момент электромотора 4 на участке мертвой зоны.
[0060] Согласно настоящему варианту осуществления, если оцененное значение ωdˆ угла кручения ведущего вала является ненулевым, то переключатель 36 крутящего момента выводит значение Tmf* команды управления конечным крутящим моментом из модуля 34 компенсации кручения. Другими словами, если крутящий момент электромотора 4 не находится на участке мертвой зоны, то переключатель 36 крутящего момента не ограничивает значение Tmf* команды управления конечным крутящим моментом.
[0061] С другой стороны, если оцененное значение ωdˆ угла кручения ведущего вала не равно нулю, то переключатель 36 крутящего момента выводит значение Tmf* команды управления конечным крутящим моментом из ограничителя 35 крутящего момента. Другими словами, если крутящий момент электромотора 4 находится на участке мертвой зоны, то переключатель 36 крутящего момента ограничивает значение Tmf* команды управления конечным крутящим моментом. Это приводит к уменьшению темпа относительного изменения между шестернями при переходе бокового зазора, в силу этого позволяя подавлять возникновение вибрации или шума, вызываемого посредством столкновения шестерней.
[0062] Фиг. 6 является блок-схемой, иллюстрирующей пример функциональной конфигурации модуля 20 оценки участков мертвой зоны в настоящем варианте осуществления.
[0063] Модуль 20 оценки участков мертвой зоны имеет модуль 21 F/B-вычисления угловой скорости кручения и модель 22 транспортного средства.
[0064] Модуль 21 F/B-вычисления угловой скорости кручения имеет конфигурацию, идентичную конфигурации модуля 30 F/B-вычисления угловой скорости кручения, проиллюстрированного на фиг. 5. Следовательно, будут указаны аналогичные ссылочные позиции, и подробное описание не будет приведено.
[0065] Модель 22 транспортного средства представляет собой модель, которая моделирует характеристику отклика транспортного средства, и состоит из параметров транспортного средства и модели мертвых зон, моделирующей боковой зазор в шестернях для редукторной передачи 5 в настоящем варианте осуществления. Модель 22 транспортного средства включает в себя пропорциональный элемент 22a, блок 22b вычитания, интегральный элемент 22c, который формирует оцененное значение ωdˆ угловой скорости кручения ведущего вала 8, интегральный элемент 22d, который формирует оцененное значение θdˆ угла кручения ведущего вала 8, элемент 22e определения мертвых зон, пропорциональный элемент 22f и фильтр 22g.
[0066] Ниже описана технология извлечения модели 22 транспортного средства.
[0067] Фиг. 7A является принципиальной схемой, которая моделирует систему трансмиссии для передачи движущей силы транспортного средства, который имеет мотор, соединенный с ведущими колесами через шестерни, и фиг. 7B является видом сбоку транспортного средства, проиллюстрированного на фиг. 7A. Уравнения движения транспортного средства, проиллюстрированные на фиг. 7A и фиг. 7B, задаются посредством выражений (1)-(6).
[0068] Математическая формула 1
 ... (1)
... (1)
 ... (2)
... (2)
 ... (3)
... (3)
 ... (4)
... (4)
 ... (5)
... (5)
 ... (6)
... (6)
[0069] Параметры в выражениях (1)-(6) являются следующими.
[0070] Jm - инерция мотора
Jw - инерция ведущих колес (для одного вала)
M - масса транспортного средства
Kd - крутильная жесткость ведущего вала
Kt - коэффициент, связанный с трением между шиной и поверхностью дороги
N - полное передаточное отношение
r - радиус нагрузки шины
ωm - угловая скорость мотора
ωw - угловая скорость вращения ведущих колес
Tm - крутящий момент мотора
Td - крутящий момент ведущего вала
F - движущая сила (для двух валов)
V - скорость транспортного средства
θd - угол кручения ведущего вала
[0071] Выражения (1)-(6) обрабатываются посредством преобразования Лапласа, чтобы определять характеристику передачи из крутящего момента Tm мотора в угловую скорость ωm мотора, за счет этого извлекая выражение (7) и выражение (8).
[0072] Математическая формула 2
 ... (7)
... (7)
 ... (8)
... (8)
[0073] Параметры в выражении (8) обозначаются посредством выражений (9)-(16), приведенных ниже.
[0074] Математическая формула 3
 ... (9)
... (9)
 ... (10)
... (10)
 ... (11)
... (11)
 ... (12)
... (12)
 ... (13)
... (13)
 ... (14)
... (14)
 ... (15)
... (15)
 ... (16)
... (16)
[0075] Кроме того, характеристика передачи из крутящего момента Tm мотора в крутящий момент Td ведущего вала определяется посредством выражения (17), и параметры c1 и c0 в выражении (17) обозначаются посредством выражений (18) и (19), соответственно.
[0076] Математическая формула 4
 ... (17)
... (17)
 ... (18)
... (18)
 ... (19)
... (19)
[0077] На основании выражения (2) и выражений (4)-(6), характеристика передачи из угловой скорости ωm вращения мотора в угловую скорость ωw вращения ведущих колес определяется посредством выражения (20), приведенного ниже.
[0078] Математическая формула 5
 ... (20)
... (20)
[0079] На основании выражения (7), выражения (8) и выражения (20), характеристика передачи из значения команды управления крутящим моментом Tm в угловую скорость ωw вращения ведущих колес определяется посредством выражения (21), приведенного ниже.
[0080] Математическая формула 6
 ... (21)
... (21)
[0081] На основании выражения (17) и выражения (21), характеристика передачи из крутящего момента Td ведущего вала в угловую скорость ωw ведущего вала определяется посредством выражения (22), приведенного ниже.
[0082] Математическая формула 7
 ... (22)
... (22)
[0083] Выражение (23), приведенное ниже, извлекается посредством преобразования выражения (1).
[0084] Математическая формула 8
 ... (23)
... (23)
Следовательно, на основании выражения (22) и выражения (23), угловая скорость ωd кручения ведущего вала определяется посредством выражения (24), приведенного ниже.
[0085] Математическая формула 9
 ... (24)
... (24)
[0086] Hw(s) в выражении (24) определяется посредством выражений (25)-(29).
[0087] Математическая формула 10
 ... (25)
... (25)
 ... (26)
... (26)
 ... (27)
... (27)
 ... (28)
... (28)
 ... (29)
... (29)
[0088] Кроме того, выражение (17) может быть преобразовано в выражение (30), приведенное ниже.
[0089] Математическая формула 11
 ... (30)
... (30)
[0090] ζp обозначает коэффициент затухания системы трансмиссии для передачи движущего крутящего момента, и ωp обозначает собственную частоту вибрации системы трансмиссии для передачи движущего крутящего момента.
[0091] Кроме того, полюс и нулевая точка в выражении (30) выражаются посредством α ≈ c0/c1. Следовательно, выражение (31) извлекается из отмены нулей и полюсов.
[0092] Математическая формула 12
 ... (31)
... (31)
[0093] Значение Tmf* команды управления конечным крутящим моментом предполагается таким, как указано посредством выражения (32), приведенного ниже.
[0094] Математическая формула 13
 ... (32)
... (32)
[0095] Выражение (32) может быть преобразовано в выражение (33), приведенное ниже, на основании выражения (4) и выражения (6).
[0096] Математическая формула 14
 ... (33)
... (33)
[0097] Когда выражение (33) подставляется в выражение (31), при условии, что Tm=Tmf*, характеристика передачи F/B-системы угловой скорости кручения ведущего вала определяется посредством выражения (34), приведенного ниже.
[0098] Математическая формула 15
 ... (34)
... (34)
[0099] Кроме того, если значение Tmt* команды управления требуемым крутящим моментом предположительно представляет собой крутящий момент Tm мотора, то отклик модели из крутящего момента Tm мотора в крутящий момент Td ведущего вала определяется посредством выражения (35), приведенного ниже.
[0100] Математическая формула 16
 ... (35)
... (35)
[0101] Условие, при котором выражение (34) и выражение (35) согласуются, т.е. условие, при котором характеристика передачи F/B-системы угловой скорости кручения ведущего вала и отклика модели согласуются, определяется посредством выражений (36) и (37), приведенных ниже.
[0102] Математическая формула 17
 ... (36)
... (36)
 ... (37)
... (37)
[0103] Коэффициент ζr1 в выражении (36) обозначает коэффициент вязкости отклика модели на участке, отличном от участка мертвой зоны, и коэффициент ζr2 в выражении (37) обозначает коэффициент вязкости отклика модели на участке мертвой зоны. Например, коэффициент ζr2 вязкости на участке мертвой зоны может задаваться равным значению, которое равно коэффициенту ζr1 вязкости на участке, отличном от участка мертвой зоны (ζr2=ζr1).
[0104] В настоящем варианте осуществления, коэффициент ζr2 вязкости на участке мертвой зоны задается равным значению, которое меньше коэффициента ζr1 вязкости на участке, отличном от участка мертвой зоны (ζr2<ζr1), чтобы уменьшать задержку отклика на участке мертвой зоны. Следовательно, второе FB-усиление k2 становится меньше первого FB-усиления k1, и величина компенсации для подавления кручения ведущего вала 8 становится меньшей, в силу этого позволяя ограничивать уменьшение скорости отклика транспортного средства.
[0105] Затем, когда характеристика бокового зазора от мотора до ведущего вала моделируется на основании мертвой зоны посредством применения выражений (1)-(29), крутящий момент Td ведущего вала определяется посредством выражения (30), приведенного ниже.
[0106] Математическая формула 18
 ... (38)
... (38)
[0107] θdead обозначает полную величину бокового зазора от мотора до ведущего вала.
[0108] Таким образом, согласно вышеприведенным выражениям (1)-(38), модель 22 транспортного средства, проиллюстрированная на фиг. 6, выполняет арифметическую обработку, которая учитывает параметры транспортного средства и модель мертвых зон, которая моделирует боковой зазор в шестернях.
[0109] Как проиллюстрировано на фиг. 6, модель 22 транспортного средства получает значение Tmf* команды управления конечным крутящим моментом из модуля 21 F/B-вычисления угловой скорости кручения и вычисляет оцененное значение ωdˆ угловой скорости кручения ведущего вала 8 на основании значения Tmf* команды управления конечным крутящим моментом. Модель 22 транспортного средства выводит оцененное значение ωdˆ угловой скорости кручения в умножители 31 и 32 усилений модуля 21 F/B-вычисления угловой скорости кручения.
[0110] Затем модель 22 транспортного средства вычисляет оцененное значение θdˆ угла кручения ведущего вала 8 на основании значения Tmf* команды управления конечным крутящим моментом и выводит оцененное значение θdˆ угла кручения в переключатель 33 усиления и переключатель 36 крутящего момента модуля 21 F/B-вычисления угловой скорости кручения.
[0111] Если оцененное значение θdˆ угла кручения является ненулевым, то модуль 21 F/B-вычисления угловой скорости кручения определяет то, что редукторная передача 5 не находится на участке мертвой зоны. В этом случае, модуль 21 F/B-вычисления угловой скорости кручения умножает оцененное значение ωdˆ угловой скорости кручения на первое FB-усиление k1, чтобы определять величину компенсации кручения, и выводит значение, которое получается посредством вычитания величины компенсации кручения из значения Tmt* команды управления требуемым крутящим моментом, в качестве значения Tmf* команды управления конечным крутящим моментом.
[0112] С другой стороны, если оцененное значение θdˆ угла кручения равно нулю, то модуль 21 F/B-вычисления угловой скорости кручения определяет то, что редукторная передача 5 находится на участке мертвой зоны. В этом случае, модуль 21 F/B-вычисления угловой скорости кручения умножает оцененное значение ωdˆ угловой скорости кручения на второе FB-усиление k2, которое меньше первого FB-усиления k1, чтобы определять величину компенсации кручения, и выводит значение, которое получается посредством вычитания величины компенсации кручения из значения Tmt* команды управления требуемым крутящим моментом, в качестве значения Tmf* команды управления конечным крутящим моментом.
[0113] Затем модель 22 транспортного средства получает значение Tmf* команды управления конечным крутящим моментом из модуля 21 F/B-вычисления угловой скорости кручения, вычисляет оцененное значение θdˆ угла кручения на основании значения Tmf* команды управления конечным крутящим моментом и выводит результат вычисления в модуль 30 F/B-вычисления угловой скорости кручения в качестве сигнала определения участка мертвой зоны.
[0114] Таким образом, модуль 20 оценки участков мертвой зоны получает значение Tmt* команды управления требуемым крутящим моментом, формирует сигнал определения участка мертвой зоны посредством управления с прямой связью с использованием значения Tmt* команды управления требуемым крутящим моментом и выводит сигнал определения в модуль 30 F/B-вычисления угловой скорости кручения.
[0115] Фиг. 8 представляет схемы, иллюстрирующие абсолютную величину шума от возникновения бокового зазора в способе управления транспортным средством согласно настоящему варианту осуществления. На фиг. 8, проиллюстрировано состояние транспортного средства, когда транспортное средство ускоряется из замедленного состояния.
[0116] Фиг. 8(a) иллюстрирует значение Tmf* команды управления конечным крутящим моментом, т.е. изменения крутящего момента, сформированного в электромоторе 4, посредством сплошной линии, и значение Tmt* команды управления требуемым крутящим моментом посредством пунктирной линии. Фиг. 8(b) иллюстрирует изменения угловой скорости ωm вращения мотора. Фиг. 8(c) иллюстрирует изменения шума, которые осуществляются в транспортном средстве. Оси абсцисс по фиг. 8(a)-(c) представляют собой временные оси, общие друг для друга.
[0117] Во время t0, значение Tmt* команды управления требуемым крутящим моментом является отрицательным значением, как проиллюстрировано на фиг. 8(a), и транспортное средство замедляется посредством рекуперативной тормозной силы электромотора 4.
[0118] Во время t1, значение Tmt* команды управления требуемым крутящим моментом начинает увеличиваться к положительной стороне. Это приводит к тому, что рекуперативная тормозная сила электромотора 4 уменьшается, и транспортное средство постепенно переключается из замедленного состояния в ускоренное состояние. В это время, значение Tmf* команды управления конечным крутящим моментом увеличивается по мере того, как темп изменения угловой скорости ωm вращения мотора увеличивается.
[0119] Угловая скорость кручения ведущего вала 8 увеличивается сразу после времени t1. Следовательно, значение Tmf* команды управления конечным крутящим моментом задается равным небольшому значению относительно значения Tmt* команды управления требуемым крутящим моментом таким образом, что угловая крутильная вибрация должна быть небольшой. По мере того, как угловая скорость кручения ведущего вала 8 увеличивается, отклонение от значения Tmt* команды управления требуемым крутящим моментом увеличивается.
[0120] Во время t2, редукторная передача 5 входит на участок мертвой зоны таким образом, что значение Tmf* команды управления конечным крутящим моментом ограничено верхним предельным значением заданного допустимого диапазона, как проиллюстрировано на фиг. 8(a).
[0121] Согласно настоящему варианту осуществления, оцененное значение θdˆ угла кручения ведущего вала 8 задается равным нулю посредством модуля 20 оценки участков мертвой зоны. Следовательно, второе FB-усиление k2, которое меньше первого FB-усиления k1, выбирается в модуле 30 F/B-вычисления угловой скорости кручения. Это приводит к тому, что значение Tmf* команды управления конечным крутящим моментом резко увеличивается, в силу этого позволяя подавлять уменьшение скорости отклика при переходе бокового зазора.
[0122] Во время t2, значение Tmf* команды управления конечным крутящим моментом, которое увеличено вследствие переключения на второе FB-усиление k2, превышает верхнее предельное значение допустимого диапазона таким образом, что значение Tmf* команды управления конечным крутящим моментом задается равным верхнему предельному значению допустимого диапазона посредством ограничителя 35 крутящего момента.
[0123] Как описано выше, крутящий момент, вводимый в систему трансмиссии для передачи движущей силы из электромотора 4, подавляется таким образом, что он не становится чрезмерно большим. Таким образом, шум, вызываемый посредством столкновения между шестернями при переходе бокового зазора в редукторной передаче 5, подавляется таким образом, что он является небольшим, как проиллюстрировано на фиг. 8(c).
[0124] Фиг. 9 представляет сравнительные схемы, иллюстрирующие изменения шума от возникновения бокового зазора в способе управления, в котором значение Tmf* команды управления конечным крутящим моментом не ограничено на участке мертвой зоны.
[0125] Как и в случае с фиг. 8, фиг. 9 иллюстрирует состояние транспортного средства, когда транспортное средство ускоряется из замедленного состояния. Оси ординат на фиг. 9(a)-(c) являются идентичными осям ординат на фиг. 8(a)-(c), и оси абсцисс на фиг. 9(a)-(c) представляют собой временные оси, общие друг для друга.
[0126] В течение периода от времени t12 до времени t13, редукторная передача 5 находится на участке мертвой зоны таким образом, что FB-усиление для вычисления величины компенсации кручения переключается с первого FB-усиления k1 на второе FB-усиление k2 таким образом, что задержка отклика транспортного средства становится небольшой. Это уменьшает величину компенсации кручения, вычитаемую из значения Tmt* команды управления требуемым крутящим моментом, в силу этого приводя к тому, что значение Tmf* команды управления конечным крутящим моментом увеличивается в импульсоподобной форме, как проиллюстрировано на фиг. 9(a).
[0127] В этом примере, значение Tmf* команды управления конечным крутящим моментом не ограничено на участке мертвой зоны таким образом, что угловая скорость ωm вращения мотора постепенно увеличивается посредством управления с обратной связью, и относительные скорости шестерней в редукторной передаче 5 становятся слишком высокими, как проиллюстрировано на фиг. 9(b). Как результат, шум, обусловленный столкновением между шестернями, увеличивается, как проиллюстрировано на фиг. 9(c).
[0128] Таким образом, попытка обеспечивать скорость отклика транспортного средства на участке мертвой зоны неудобно приводит к увеличению шума, вызываемого посредством бокового зазора. В отличие от этого, настоящий вариант осуществления позволяет подавлять шум или вибрацию, которая возникает при переходе бокового зазора, при одновременном обеспечении скорости отклика транспортного средства посредством ограничения значения Tmf* команды управления конечным крутящим моментом на участке мертвой зоны, как проиллюстрировано на фиг. 8.
[0129] В примере по фиг. 8, значение Tmf* команды управления конечным крутящим моментом ограничено верхним предельным значением допустимого диапазона, когда транспортное средство ускорено из замедленного состояния. Идентичная работа и преимущества могут получаться посредством ограничения значения Tmf* команды управления конечным крутящим моментом, даже когда транспортное средство замедляется из ускоренного состояния.
[0130] Например, если значение mf* команды управления конечным крутящим моментом уменьшается ниже нижнего предельного значения допустимого диапазона на участке мертвой зоны в ситуации, в которой значение Tmt* команды управления требуемым крутящим моментом монотонно уменьшается от положительной стороны к отрицательной стороне, то ограничитель 35 крутящего момента задает значение mf* команды управления конечным крутящим моментом равным нижнему предельному значению допустимого диапазона. Таким образом, шум, обусловленный боковым зазором, может подавляться посредством ограничения абсолютного значения для значения mf* команды управления конечным крутящим моментом заданным значением на участке мертвой зоны.
[0131] Фиг. 10 является схемой, иллюстрирующей другой пример функциональной конфигурации модуля 30 F/B-вычисления угловой скорости кручения в настоящем варианте осуществления.
[0132] Модуль 30 F/B-вычисления угловой скорости кручения, проиллюстрированный на фиг. 10, содержит компенсатор 37 кручения вместо переключателя 33 усиления модуля F/B-вычисления угловой скорости кручения, проиллюстрированного на фиг. 5. Остальная конфигурация является идентичной конфигурации модуля F/B-вычисления угловой скорости кручения, проиллюстрированного на фиг. 5, так что будут указаны аналогичные ссылочные позиции, и их подробное описание не будет приведено.
[0133] Модуль 34 компенсации кручения вычисляет значение Tmf* команды управления конечным крутящим моментом посредством вычитания величины компенсации кручения, которая получается посредством умножения угловой скорости ωd кручения ведущего вала на первое FB-усиление k1 посредством умножителя 31 усилений, из значения Tmt* команды управления требуемым крутящим моментом. Модуль 34 компенсации кручения выводит значение Tmf* команды управления конечным крутящим моментом в переключатель 36 крутящего момента.
[0134] Компенсатор 37 кручения вычисляет значение Tmf* команды управления конечным крутящим моментом посредством вычитания величины компенсации кручения, которая получается посредством умножения угловой скорости ωd кручения ведущего вала на второе FB-усиление k2 посредством умножителя 32 усилений, из значения Tmt* команды управления требуемым крутящим моментом. Компенсатор 37 кручения выводит значение Tmf* команды управления конечным крутящим моментом в ограничитель 35 крутящего момента.
[0135] Таким образом, даже конфигурация, имеющая компенсатор 37 кручения вместо переключателя 33 усиления, проиллюстрированного на фиг. 5 может уменьшать величину компенсации кручения и также ограничивать значение Tmf* команды управления конечным крутящим моментом на участке мертвой зоны. Это позволяет подавлять возникновение шумов и вибраций, обусловленных боковыми зазорами в шестернях, при одновременном подавлении задержки скорости отклика транспортного средства.
[0136] Вместо конфигурации, проиллюстрированной на фиг. 6, конфигурация, идентичная конфигурации, проиллюстрированной на фиг. 10, может применяться к конфигурации модуля 21 F/B-вычисления угловой скорости кручения модуля 20 оценки участков мертвой зоны настоящего варианта осуществления.
[0137] Согласно первому варианту осуществления настоящего изобретения, контроллер 2 электромотора выполняет замедление посредством рекуперативного торможения мотора 4, соединенного с ведущим валом 8 ведущих колес 9a и 9b транспортного средства. Контроллер 2 электромотора вычисляет значение команды управления крутящим моментом Tmf* для подавления компонента вибрации ведущего вала 8 посредством возврата угловой скорости ωd кручения ведущего вала 8 относительно требуемого крутящего момента Tmt* для определения мощности электромотора 4. Затем контроллер 2 электромотора оценивает участок мертвой зоны, в которой крутящий момент электромотора 4 не передается на ведущий вал 8, на основании требуемого крутящего момента Tmt*, и если оценивается то, что крутящий момент электромотора 4 находится на участке мертвой зоны, то контроллер 2 электромотора ограничивает значение команды управления крутящим моментом Tmf*. На основании значения команды управления крутящим моментом Tmf*, контроллер 2 электромотора управляет работой электромотора 4.
[0138] Когда угловая скорость ωd кручения ведущего вала 8 возвращается таким образом, что крутильная вибрация ведущего вала 8 уменьшается, значение Tmf* команды управления крутящим моментом увеличивается по мере того, как темп изменения угловой скорости вращения мотора увеличивается на участке мертвой зоны. Как результат, шум или вибрация осуществляется вследствие бокового зазора транспортного средства.
[0139] В качестве корректирующих мер, согласно настоящему варианту осуществления оценивается участок мертвой зоны в транспортном средстве, и значение Tmf* команды управления крутящим моментом ограничено на участке мертвой зоны, в силу этого позволяя подавлять шум или вибрацию, обусловленную боковым зазором, при одновременном подавлении крутильной вибрации ведущего вала 8.
[0140] Кроме того, согласно настоящему варианту осуществления, контроллер 2 электромотора вычисляет значение команды управления крутящим моментом Tmf* посредством вычитания величины компенсации кручения, которая имеет значение, полученное посредством умножения угловой скорости ωd кручения ведущего вала 8 на усиление k1 обратной связи (FB), из требуемого крутящего момента Tmt*. Если оценивается то, что крутящий момент, сформированный в электромоторе 4, находится на участке мертвой зоны, то контроллер 2 электромотора переключает усиление обратной связи с усиления k1 обратной связи на усиление k2 обратной связи, чтобы уменьшать усиление обратной связи, используемое для вычисления величины компенсации кручения, таким образом, чтобы увеличивать скорость отклика электромотора 4.
[0141] Как описано выше, величина компенсации кручения, вычитаемая из значения команды Tmf* управления крутящим моментом, уменьшается посредством уменьшения усиления обратной связи, на которое умножается угловая скорость ωd кручения ведущего вала 8, на участке мертвой зоны, за счет этого обеспечивая возможность повышения скорости отклика транспортного средства. Следовательно, шум или вибрация, обусловленная боковым зазором на участке мертвой зоны, может подавляться при одновременном обеспечении скорости отклика транспортного средства.
[0142] Кроме того, согласно настоящему варианту осуществления, контроллер 2 электромотора определяет, находится ли крутящий момент, сформированный в электромоторе 4, на участке мертвой зоны, на основании оцененного значения θdˆ угла кручения, вычисленного посредством модели 22 транспортного средства, моделирующей характеристику отклика транспортного средства. Если оцененное значение θdˆ угла кручения составляет заданное значение, например, 0 (нуль), то контроллер 2 электромотора определяет то, что крутящий момент находится на участке мертвой зоны. Если оцененное значение θdˆ угла кручения является ненулевым, то контроллер 2 электромотора определяет то, что крутящий момент находится на участке, отличном от участка мертвой зоны.
[0143] Как описано выше, то, находится ли транспортное средство на участке мертвой зоны, может точно определяться посредством использования модели 22 транспортного средства, состоящей из модели мертвых зон, моделирующей боковой зазор в шестернях таким образом, что значение Tmf* команды управления крутящим моментом может быть точно ограничено.
[0144] Второй вариант осуществления
Фиг. 11 является блок-схемой, иллюстрирующей функциональную конфигурацию модуля 30 F/B-вычисления угловой скорости кручения во втором варианте осуществления настоящего изобретения.
[0145] Модуль 30 F/B-вычисления угловой скорости кручения настоящего варианта осуществления содержит модуль 38 выбора максимумов в дополнение к конфигурации модуля F/B-вычисления угловой скорости кручения, проиллюстрированного на фиг. 10. Остальная конфигурация является идентичной конфигурации, проиллюстрированной на фиг. 10, так что будут указаны аналогичные ссылочные позиции, и подробное описание не будет приведено.
[0146] Модуль 38 выбора максимумов получает значение Tmf* команды управления конечным крутящим моментом участка, отличного от участка мертвой зоны, из модуля 34 компенсации кручения и значение Tmf* команды управления конечным крутящим моментом на участке мертвой зоны из ограничителя 35 крутящего момента. Затем модуль 38 выбора максимумов выбирает значение Tmf* команды управления конечным крутящим моментом участка, отличного от участка мертвой зоны, либо значение Tmf* команды управления конечным крутящим моментом на участке мертвой зоны, в зависимости от того, какое из них имеет большее значение, и выводит выбранное значение, в качестве значения Tmf* команды управления конечным крутящим моментом на участке мертвой зоны, в переключатель 36 крутящего момента.
[0147] Таким образом, наличие модуля 38 выбора максимумов на последующей стадии ограничителя 35 крутящего момента позволяет увеличивать значение Tmf* команды управления конечным крутящим моментом таким образом, что оно превышает значение, ограниченное допустимым диапазоном шума/вибрации в случае, если темп временного изменения значения Tmf* команды управления конечным крутящим моментом является высоким.
[0148] Следовательно, если ускорение транспортного средства является высоким, и значение Tmf* команды управления конечным крутящим моментом участка, отличного от участка мертвой зоны, превышает верхнее предельное значение допустимого диапазона шума/вибрации, то значение Tmf* команды управления конечным крутящим моментом задается равным значению, которое превышает верхнее предельное значение допустимого диапазона шума/вибрации, в силу этого позволяя подавлять уменьшение скорости отклика транспортного средства. Следовательно, когда темп временного изменения значения Tmt* команды управления требуемым крутящим моментом увеличивается в определенной степени, может быть отдан более высокий приоритет обеспечению скорости отклика транспортного средства, чем подавлению шума или вибрации, обусловленной боковым зазором.
[0149] Другими словами, согласно настоящему варианту осуществления, подавление шума или вибрации, обусловленной боковым зазором в шестернях, и обеспечение скорости отклика транспортного средства может достигаться с хорошим балансом согласно абсолютной величине темпа временного изменения значения Tmt* команды управления требуемым крутящим моментом.
[0150] Фиг. 12 является блок-схемой, иллюстрирующей пример функциональной конфигурации модуля 20 оценки участков мертвой зоны в настоящем варианте осуществления.
[0151] Модуль 20 оценки участков мертвой зоны настоящего варианта осуществления включает в себя модуль 21 F/B-вычисления угловой скорости кручения и модель 22 транспортного средства.
[0152] Конфигурация модуля 21 F/B-вычисления угловой скорости кручения настоящего варианта осуществления является по существу идентичной конфигурации модуля 30 F/B-вычисления угловой скорости кручения, проиллюстрированного на фиг. 11. Кроме того, конфигурация модели 22 транспортного средства является идентичной конфигурации модели транспортного средства, проиллюстрированной на фиг. 5.
[0153] Как описано выше, участок мертвой зоны может точно оцениваться за счёт наличия модуля 21 F/B-вычисления угловой скорости кручения в модуле 20 оценки участков мертвой зоны с конфигурацией, идентичной конфигурации модуля 30 F/B-вычисления угловой скорости кручения, проиллюстрированного на фиг. 11.
[0154] Фиг. 13 является блок-схемой, иллюстрирующей пример процедуры обработки, связанной с арифметической обработкой для управления демпфированием вибрации, выполняемой на этапе S203.
[0155] На этапе S11, контроллер 2 электромотора вычисляет значение Tmf* команды управления конечным крутящим моментом посредством воздействия по каналу обратной связи угловой скорости ωd кручения ведущего вала на значение Tmt* команды управления требуемым крутящим моментом в модуле 30 F/B-вычисления угловой скорости кручения.
[0156] В настоящем варианте осуществления, контроллер 2 электромотора определяет величину компенсации кручения посредством умножения угловой скорости ωd кручения ведущего вала 8 на первое FB-усиление k1 и вычитает величину компенсации кручения из значения Tmt* команды управления требуемым крутящим моментом, чтобы вычислять значение Tm1* команды управления первым крутящим моментом. Кроме того, контроллер 2 электромотора определяет величину компенсации кручения посредством умножения угловой скорости ωd кручения ведущего вала 8 на второе FB-усиление k2 и вычитает величину компенсации кручения из значения Tmt* команды управления требуемым крутящим моментом, чтобы вычислять значение Tm2* команды управления вторым крутящим моментом.
[0157] На этапе S12, контроллер 2 электромотора оценивает, в модуле 20 оценки участков мертвой зоны, участок мертвой зоны системы трансмиссии для передачи движущей силы между электромотором 4 и ведущими колесами 9a, 9b в транспортном средстве на основании значения Tmt* команды управления требуемым крутящим моментом. Контроллер 2 электромотора настоящего варианта осуществления вычисляет оцененное значение θdˆ угла кручения ведущего вала 8 из значения Tmt* команды управления требуемым крутящим моментом посредством использования модели 22 транспортного средства, которая учитывает боковой зазор в шестернях, и выводит результат вычисления в качестве сигнала S определения для определения участка мертвой зоны.
[0158] На этапе S13, контроллер 2 электромотора определяет, находится ли редукторная передача 5 на участке мертвой зоны.
[0159] Контроллер 2 электромотора настоящего варианта осуществления определяет, в переключателе 36 крутящего момента, то, что редукторная передача 5 находится на участке мертвой зоны, если оцененное значение θdˆ угла кручения равно нулю, или определяет то, что редукторная передача 5 не находится на участке мертвой зоны, если оцененное значение θdˆ угла кручения является ненулевым.
[0160] На этапах S14-S17, контроллер 2 электромотора ограничивает значение Tm2* команды управления вторым крутящим моментом в ограничителе 35 крутящего момента, если редукторная передача 5 находится на участке мертвой зоны.
[0161] На этапе S14, если редукторная передача 5 находится на участке мертвой зоны, то контроллер 2 электромотора определяет, превышает ли значение команды управления вторым крутящим моментом Tmf* верхнее предельное значение Tmax допустимого диапазона шума/вибрации.
[0162] На этапе S18, если значение Tm2* команды управления вторым крутящим моментом превышает верхнее предельное значение Tmax допустимого диапазона шума/вибрации, то контроллер 2 электромотора выводит, в качестве значения Tmf* команды управления конечным крутящим моментом, верхнее предельное значение Tmax или значение Tm1* команды управления первым крутящим моментом, в зависимости от того, какое из них имеет большее значение.
[0163] На этапе S15, если значение Tm2* команды управления вторым крутящим моментом равно или ниже верхнего предельного значения Tmax допустимого диапазона шума/вибрации, то контроллер 2 электромотора определяет, меньше ли значение Tm2* команды управления вторым крутящим моментом нижнего предельного значения Tmin допустимого диапазона шума/вибрации.
[0164] На этапе S17, если значение Tm2* команды управления вторым крутящим моментом меньше нижнего предельного значения Tmin допустимого диапазона шума/вибрации, то контроллер 2 электромотора выводит, в качестве значения Tmf* команды управления конечным крутящим моментом, нижнее предельное значение Tmin либо значение Tm1* команды управления первым крутящим моментом, в зависимости от того, какое из них имеет меньшее значение.
[0165] На этапе S16, если значение Tm2* команды управления вторым крутящим моментом равно или ниже верхнего предельного значения Tmax и равно или выше нижнего предельного значения Tmin, т.е. находится в пределах допустимого диапазона шума/вибрации, то контроллер 2 электромотора выводит значение Tm2* команды управления вторым крутящим моментом в качестве значения Tmf* команды управления конечным крутящим моментом.
[0166] На этапе S19, если оцененное значение θdˆ угла кручения не равно нулю, то контроллер 2 электромотора определяет, что редукторная передача 5 не находится на участке мертвой зоны, и выводит значение Tm1* команды управления первым крутящим моментом в качестве значения Tmf* команды управления конечным крутящим моментом.
[0167] После этого, если обработка любого из этапов S16-S19 заканчивается, последовательность этапов процедуры обработки, связанных с арифметической обработкой для управления демпфированием вибрации, заканчивается.
[0168] Фиг. 14 является концептуальной схемой, иллюстрирующей взаимосвязь между темпом временного изменения значения Tmt* команды управления требуемым крутящим моментом и значения Tmf* команды управления конечным крутящим моментом на участке мертвой зоны согласно настоящему варианту осуществления.
[0169] На фиг. 14 значение Tm1* команды управления первым крутящим моментом обозначено пунктирной линией, значение Tm2* команды управления вторым крутящим моментом обозначено пунктирной линией, и значение Tmf* команды управления конечным крутящим моментом обозначено сплошной линией.
[0170] На участке низких частот вращения, на котором темп временного изменения значения Tmt* команды управления требуемым крутящим моментом составляет от нуля до V1, значение Tm2* команды управления вторым крутящим моментом задается в качестве значения Tmf* команды управления конечным крутящим моментом таким образом, чтобы обеспечивать скорость отклика транспортного средства на участке мертвой зоны. На участке низких частот вращения, значение Tmf* команды управления конечным крутящим моментом увеличивается по мере того, ка темп временного изменения значения Tmt* команды управления требуемым крутящим моментом увеличивается.
[0171] На участке средних частот вращения, в которой темп временного изменения значения Tmt* команды управления требуемым крутящим моментом составляет от V1 до V2, значение Tmf* команды управления конечным крутящим моментом ограничено верхним предельным значением Tmax допустимого диапазона шума/вибрации посредством ограничителя 35 крутящего момента. Это позволяет подавлять возникновение шума или вибрации, обусловленной боковым зазором, при одновременном обеспечении скорости отклика транспортного средства на участке мертвой зоны.
[0172] На участке высоких частот вращения, в которой темп временного изменения значения Tmt* команды управления требуемым крутящим моментом превышает V2, значение Tm1* команды управления первым крутящим моментом становится больше верхнего предельного значения Tmax. Следовательно, значение Tm1* команды управления первым крутящим моментом задается в качестве значения Tmf* команды управления конечным крутящим моментом посредством модуля 38 выбора максимумов. Это позволяет предотвращать чрезмерное уменьшение скорости отклика транспортного средства при одновременной минимизации увеличения шума или вибрации, обусловленной боковым зазором.
[0173] Фиг. 15 представляет временные диаграммы, иллюстрирующие временные изменения значения Tmf* команды управления конечным крутящим моментом в трех точках, a-c, проиллюстрированных на фиг. 14.
[0174] Фиг. 15(a) иллюстрирует временное изменение значения Tmf* команды управления конечным крутящим моментом в точке a на участке низких частот вращения, обозначаемой посредством сплошной линии на фиг. 14, фиг. 15(b) иллюстрирует временное изменение значения Tmf* команды управления конечным крутящим моментом в точке b на участке средних частот вращения и иллюстрирует временное изменение значения Tmf* команды управления конечным крутящим моментом в точке c на участке высоких частот вращения.
[0175] Каждый из фиг. 15(a)-(c) иллюстрирует значение Tmf* команды управления конечным крутящим моментом посредством сплошной линии и значение Tmt* команды управления требуемым крутящим моментом посредством пунктирной линии. Оси абсцисс по фиг. 15(a)-(c) представляют собой временные оси, общие друг для друга.
[0176] Как проиллюстрировано на фиг. 15(a), относительная скорость между шестернями уменьшается на участке низких частот вращения таким образом, что значение Tm2* команды управления вторым крутящим моментом задается, без ограничения, в качестве значения Tmf* команды управления конечным крутящим моментом, когда редукторная передача 5 входит на участок мертвой зоны. Это приводит к тому, что значение Tmf* команды управления конечным крутящим моментом немного увеличивается, приближаясь к значению Tmt* команды управления требуемым крутящим моментом таким образом, что время для перехода бокового зазора может сокращаться.
[0177] Как проиллюстрировано на фиг. 15(b), относительная скорость между шестернями в редукторной передаче 5 увеличивается на участке средних частот вращения таким образом, что значение Tm2* команды управления вторым крутящим моментом становится больше верхнего предельного значения Tmax допустимого диапазона шума/вибрации. Следовательно, значение Tmf* команды управления конечным крутящим моментом ограничено верхним предельным значением Tmax посредством ограничителя 35 крутящего момента, в силу этого позволяя подавлять шум или вибрацию, обусловленную боковым зазором в шестернях.
[0178] Как проиллюстрировано на фиг. 15(c), участок высоких частот вращения представляет собой случай, в котором водитель глубоко нажимает педаль акселератора таким образом, что значение Tm1* команды управления первым крутящим моментом задается в качестве значения Tmf* команды управления конечным крутящим моментом посредством модуля 38 выбора максимумов, чтобы отдавать приоритет обеспечению ускорения транспортного средства на этом участке.
[0179] Таким образом, посредством задания значения Tm1* команды управления первым крутящим моментом, которое меньше значения Tm2* команды управления вторым крутящим моментом, в качестве значения Tmf* команды управления конечным крутящим моментом, простота работы для водителя может обеспечиваться при одновременном подавлении увеличения шума или вибрации, обусловленной столкновением шестерней.
[0180] Как описано выше, либо значение Tm1* команды управления первым крутящим моментом, либо выходное значение ограничителя 35 крутящего момента, в зависимости от того, какое из них больше, задается в качестве значения Tmf* команды управления конечным крутящим моментом, в силу этого позволяя надлежащим образом назначать приоритет подавлению шума или вибрации, обусловленной боковым зазором, либо обеспечению простоты работы для водителя согласно темпу временного изменения значения Tmt* команды управления требуемым крутящим моментом. Следовательно, возникновение ощущения застоя или шума на участке мертвой зоны может не допускаться без вызывания дискомфорта у водителя, за счет этого приводя к повышенному комфорту во время езды водителя.
[0181] Согласно второму варианту осуществления настоящего изобретения, контроллер 2 электромотора вычисляет значение Tm1* команды управления первым крутящим моментом посредством умножения угловой скорости ωd кручения ведущего вала 8 на первое усиление k1 обратной связи в случае, если оценивается то, что транспортное средство не находится на участке мертвой зоны. Кроме того, контроллер 2 электромотора вычисляет значение Tm2* команды управления вторым крутящим моментом посредством умножения угловой скорости ωd кручения на второе усиление k2 обратной связи, которое меньше первого усиления k1 обратной связи, в случае если оценивается то, что транспортное средство находится на участке мертвой зоны.
[0182] Кроме того, на этапах S14-S18, контроллер 2 мотора задает, в качестве значения Tmf* команды управления конечным крутящим моментом, либо значение, полученное посредством ограничения значения Tm2* команды управления вторым крутящим моментом заданным допустимым диапазоном шума/вибрации, либо значение Tm1* команды управления первым крутящим моментом, в зависимости от того, какое значение больше.
[0183] Таким образом, как проиллюстрировано на фиг. 14, значение Tmf* команды управления конечным крутящим моментом увеличивается относительно предельного значения допустимого диапазона шума/вибрации по мере того, как темп изменения значения Tmt* команды управления требуемым крутящим моментом увеличивается таким образом, что может быть отдан более высокий приоритет обеспечению скорости отклика транспортного средства, чем подавлению шума или вибрации, обусловленной боковым зазором.
[0184] Третий вариант осуществления
Фиг. 16 является блок-схемой, иллюстрирующей пример функциональной конфигурации модуля 201 вычисления для управления демпфированием вибрации в третьем варианте осуществления настоящего изобретения.
[0185] Модуль 201 вычисления для управления демпфированием вибрации соответствует модулю 200 вычисления для управления демпфированием вибрации в первом варианте осуществления. Модуль 201 вычисления для управления демпфированием вибрации содержит модуль 40 F/F-компенсации угловой скорости кручения, модуль 50 F/B-компенсации разности и сумматор 60.
[0186] Модуль 40 F/F-компенсации угловой скорости кручения принимает значение Tmt* команды управления требуемым крутящим моментом и выводит значение Tmf* команды управления конечным крутящим моментом и оцененное значение ωmˆ угловой скорости вращения мотора относительно значения Tmf* команды управления конечным крутящим моментом.
[0187] Модуль 50 F/B-компенсации разности принимает оцененное значение ωmˆ угловой скорости вращения мотора и значение ωm обнаружения угловой скорости вращения мотора и выводит величину Td* компенсации разностного крутящего момента для компенсации кручения ведущего вала 8.
[0188] Сумматор 60 корректирует значение Tmf* команды управления конечным крутящим моментом на основании значения Tmf* команды управления конечным крутящим моментом, выводимого из модуля 40 F/F-компенсации угловой скорости кручения, и величины Td* компенсации разностного крутящего момента, выводимой из модуля 50 F/B-компенсации разности. В настоящем варианте осуществления, сумматор 60 суммирует значение Tmf* команды управления конечным крутящим моментом и величину Td* компенсации разностного крутящего момента и выводит скорректированное значение Tmfc* команды управления конечным крутящим моментом.
[0189] Фиг. 17 является блок-схемой, иллюстрирующей подробную конфигурацию модуля 40 F/F-компенсации угловой скорости кручения. Модуль 40 F/F-компенсации угловой скорости кручения содержит модуль 41 F/B-вычисления угловой скорости кручения и модель 42 транспортного средства.
[0190] Модель 42 транспортного средства состоит из параметров транспортного средства и модели мертвых зон, моделирующей боковой зазор в шестернях. Модель 42 транспортного средства принимает значение Tmf* команды управления конечным крутящим моментом и выводит оцененное значение ωdˆ угловой скорости кручения ведущего вала 8 и оцененное значение ωmˆ угловой скорости мотора. Модель 42 транспортного средства применяет выражения (1)-(29). Выражение (38) применяется к характеристике бокового зазора от электромотора 4 до ведущего вала 8.
[0191] Модуль 41 F/B-вычисления угловой скорости кручения имеет конфигурацию, идентичную конфигурации модуля 41 F/B-вычисления угловой скорости кручения, проиллюстрированного на фиг. 6. Модуль 41 F/B-вычисления угловой скорости кручения вычисляет значение Tmf* команды управления конечным крутящим моментом посредством использования значения Tmt* команды управления требуемым крутящим моментом и оцененного значения ωmˆ угловой скорости мотора.
[0192] Более конкретно, значение Tmt* команды управления требуемым крутящим моментом и оцененное значение ωmˆ угловой скорости мотора вводятся в модуль 41 F/B-вычисления угловой скорости кручения. Если оцененное значение θdˆ угла кручения ведущего вала 8 является ненулевым, т.е. если редукторная передача 5 находится на участке, отличном от участка мертвой зоны, то модуль 41 F/B-вычисления угловой скорости кручения вычисляет значение Tmf* команды управления конечным крутящим моментом посредством вычитания значения, которое получается посредством умножения оцененного значения ωdˆ угловой скорости кручения ведущего вала 8 на первое FB-усиление k1, из значения Tmt* команды управления требуемым крутящим моментом.
[0193] С другой стороны, если оцененное значение θdˆ угла кручения равно нулю, т.е. если редукторная передача 5 находится на участке мертвой зоны, то модуль 41 F/B-вычисления угловой скорости кручения вычисляет значение Tmb* команды управления базовым крутящим моментом посредством вычитания значения, которое получается посредством умножения оцененного значения ωdˆ угловой скорости кручения на второе FB-усиление k2, из значения Tmt* команды управления требуемым крутящим моментом. Кроме того, модуль 41 F/B-вычисления угловой скорости кручения ограничивает значение Tmf* команды управления конечным крутящим моментом посредством верхнего предельного значения и нижнего предельного значения допустимого диапазона шума/вибрации на участке мертвой зоны.
[0194] Первое FB-усиление k1 вычисляется согласно выражению (36), и второе FB-усиление k2 вычисляется согласно выражению (37).
[0195] Фиг. 18 является блок-схемой, иллюстрирующей подробную конфигурацию модуля 50 F/B-компенсации разности.
[0196] Модуль 50 F/B-компенсации разности содержит секцию 51 вычисления, которая оценивает угол вращения мотора относительно величины Td* компенсации разностного крутящего момента, секцию 52 обработки, которая составляет фильтр, и умножитель 53 усилений.
[0197] Секция 51 вычисления принимает величину Td* компенсации разностного крутящего момента и выводит оцененное значение угла вращения мотора посредством использования характеристики Gp(s) передачи, которая должна управляться. Выражение (8) применяется к характеристике Gp(s) передачи, которая должна управляться.
[0198] Секция 52 обработки состоит из фильтра (H(s)/Gp(s)), состоящего из обратной характеристики для характеристики Gp(s) передачи и полосового фильтра H(s). Полосовой фильтр H(s) задается таким образом, что характеристики затухания на стороне нижних частот и стороне верхних частот практически совпадают друг с другом, и резонансная частота крутильных колебаний приводной системы находится около центра полосы пропускания на логарифмической оси (в логарифмической шкале).
[0199] Например, когда полосовой фильтр H(s) конфигурирован посредством первичного фильтра верхних частот и первичного фильтра нижних частот, полосовой фильтр H(s) определяется посредством выражений (39)-(43), приведенных ниже.
[0200] Математическая формула 19
 ... (39)
... (39)
 ... (40)
... (40)
 ... (41)
... (41)
 ... (42)
... (42)
 ... (43)
... (43)
[0201] Коэффициент k в выражениях (41) и (42) принимает любое значение, и частота fp обозначает резонансную частоту крутильных колебаний системы трансмиссии для передачи движущей силы.
[0202] Умножитель 53 усилений размещён с возможностью регулирования допустимых запасов стабильности (допустимый запас по усилению и допустимый запас по фазе) системы управления F/B-системы. Усиление K, заданное в умножителе 53 усилений, принимает значение, имеющее абсолютную величину в 1 или меньше.
[0203] Таким образом, модуль 50 F/B-компенсации разности суммирует оцененное значение ωmˆ угловой скорости вращения мотора относительно значения Tmf* команды управления конечным крутящим моментом, вычисленного посредством модели 42 транспортного средства, и оцененное значение угла вращения мотора относительно величины Td* компенсации разностного крутящего момента, чтобы определять конечное оцененное значение угловой скорости вращения мотора. Затем модуль 50 F/B-компенсации разности вычисляет величину Td* компенсации разностного крутящего момента посредством пропускания разности между определенным конечным оцененным значением частоты вращения мотора и обнаруженным значением ωm угловой скорости вращения мотора через секцию 52 обработки.
[0204] Хотя желательно иметь модуль 50 F/B-компенсации разности в качестве составляющей устройства управления транспортного средства, крутящий момент мотора также может управляться на основании значения Tmf* команды управления конечным крутящим моментом, выводимого из модуля 40 F/F-компенсации угловой скорости кручения, без наличия модуля 50 F/B-компенсации разности. Кроме того, модуль 50 F/B-компенсации разности может быть выполнен с возможностью вычисления величины Td* компенсации разностного крутящего момента посредством умножения разности между оцененным значением ωmˆ угловой скорости мотора и обнаруженным значением угловой скорости мотора ωm на заданное усиление.
[0205] Как описано выше, контроллер 2 электромотора настоящего варианта осуществления может подавлять шум, который формируется, когда шестерни вводятся зацепление друг с другом, посредством ограничения абсолютного значения для значения Tmf* команды управления конечным крутящим моментом заданным значением на участке мертвой зоны.
[0206] Фиг. 19 является схемой, иллюстрирующей другой пример функциональной конфигурации модуля 40 F/F-компенсации угловой скорости кручения в настоящем варианте осуществления. Модуль 41 F/B-вычисления угловой скорости кручения, проиллюстрированный на фиг. 19, имеет конфигурацию, идентичную конфигурации модуля F/B-вычисления угловой скорости кручения, проиллюстрированного на фиг. 10. Эта конфигурация также допускает обеспечение той же самой работы и преимуществ.
[0207] Согласно третьему варианту осуществления настоящего изобретения, контроллер 2 электромотора принимает значение Tmt* команды управления требуемым крутящим моментом и выводит оцененное значение ωdˆ угловой скорости кручения, используемое для того, чтобы вычислять оцененное значение ωmˆ угловой скорости вращения, и значение Tmf* команды управления конечным крутящим моментом электромотора 4 посредством использования модели 42 транспортного средства, моделирующей характеристики отклика транспортного средства.
[0208] Кроме того, контроллер 2 электромотора вычисляет значение Tmf* команды управления конечным крутящим моментом посредством вычитания значения, которое получается посредством умножения оцененного значения ωdˆ угловой скорости кручения ведущего вала 8 на второе FB-усиление k2, из значения Tmt* команды управления требуемым крутящим моментом. Контроллер 2 электромотора ограничивает значение Tmf* команды управления конечным крутящим моментом заданным допустимым диапазоном шума/вибрации на участке мертвой зоны и корректирует значение Tmf* команды управления конечным крутящим моментом посредством управления с обратной связью на основании обнаруженного значения ωm и оцененного значения ωmˆ угловой скорости вращения электромотора 4.
[0209] Как описано выше, значение Tmf* команды управления конечным крутящим моментом определяется посредством управления с прямой связью с использованием модели 42 транспортного средства, в силу этого позволяя подавлять шумы, когда шестерни переходят боковые зазоры, без ухудшения стабильности системы управления с обратной связью.
[0210] Кроме того, согласно настоящему варианту осуществления, как проиллюстрировано на фиг. 17, контроллер 2 электромотора вычисляет оцененное значение θdˆ угла кручения ведущего вала 8 посредством использования модели 42 транспортного средства и определяет, находится ли транспортное средство на участке мертвой зоны, согласно абсолютной величине оцененного значения θdˆ угла кручения.
[0211] Таким образом, оцененное значение θdˆ угла кручения ведущего вала 8 может определяться посредством использования модели 42 транспортного средства, которая выводит оцененное значение ωmˆ угловой скорости вращения электромотора 4 таким образом, что перекрытие арифметической обработки может не допускаться, и нагрузка по обработке на контроллер 2 электромотора может уменьшаться.
[0212] Выше описаны варианты осуществления настоящего изобретения. Тем не менее, вышеприведенные варианты осуществления представляют собой лишь некоторые примеры, в которых применяется настоящее изобретение, и не предназначено для ограничения объема настоящего изобретения конкретными конфигурациями вышеприведенных вариантов осуществления.
[0213] В вышеприведенных вариантах осуществления, приведено описание транспортных средств, выполненных с возможностью задания положения акселератора к нулю таким образом, чтобы увеличивать рекуперативную тормозную силу электромотора 4, за счет этого замедляя транспортное средство. Тем не менее, настоящее изобретение может применяться также в транспортном средстве, выполненном с возможностью замедления посредством использования рекуперативной тормозной силы электромотора 4 водителем, нажимающим педаль тормоза.
[0214] Вышеприведенные варианты осуществления могут комбинироваться надлежащим образом.



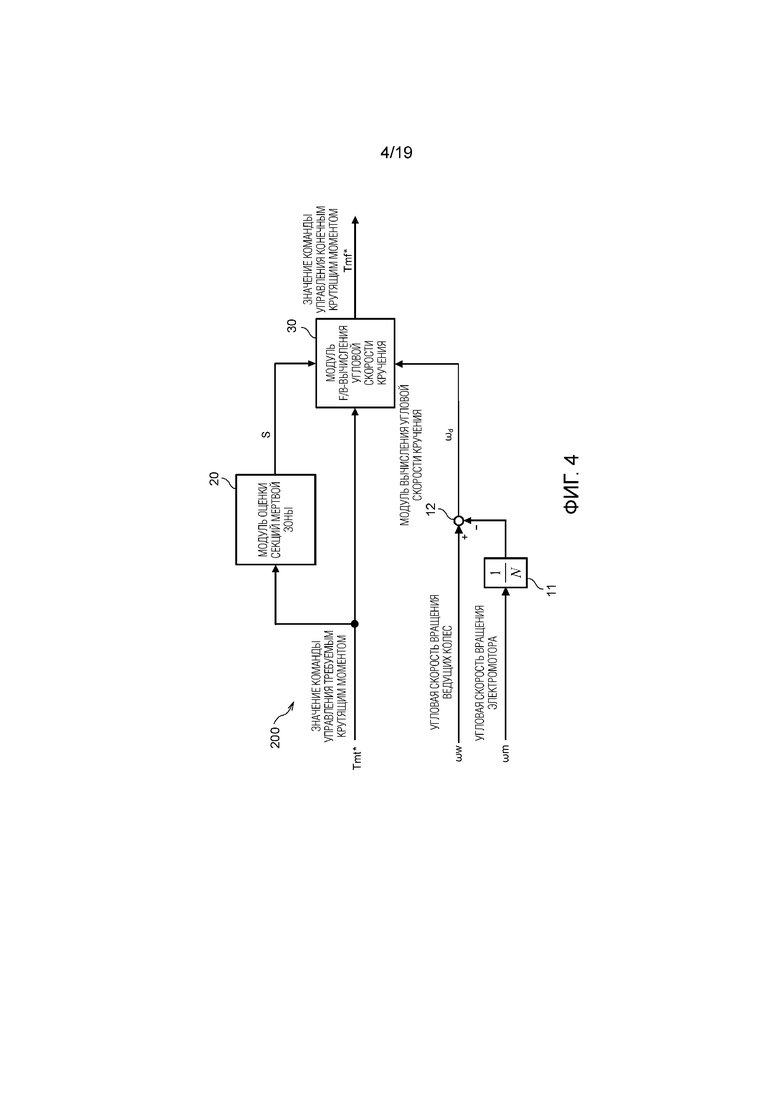


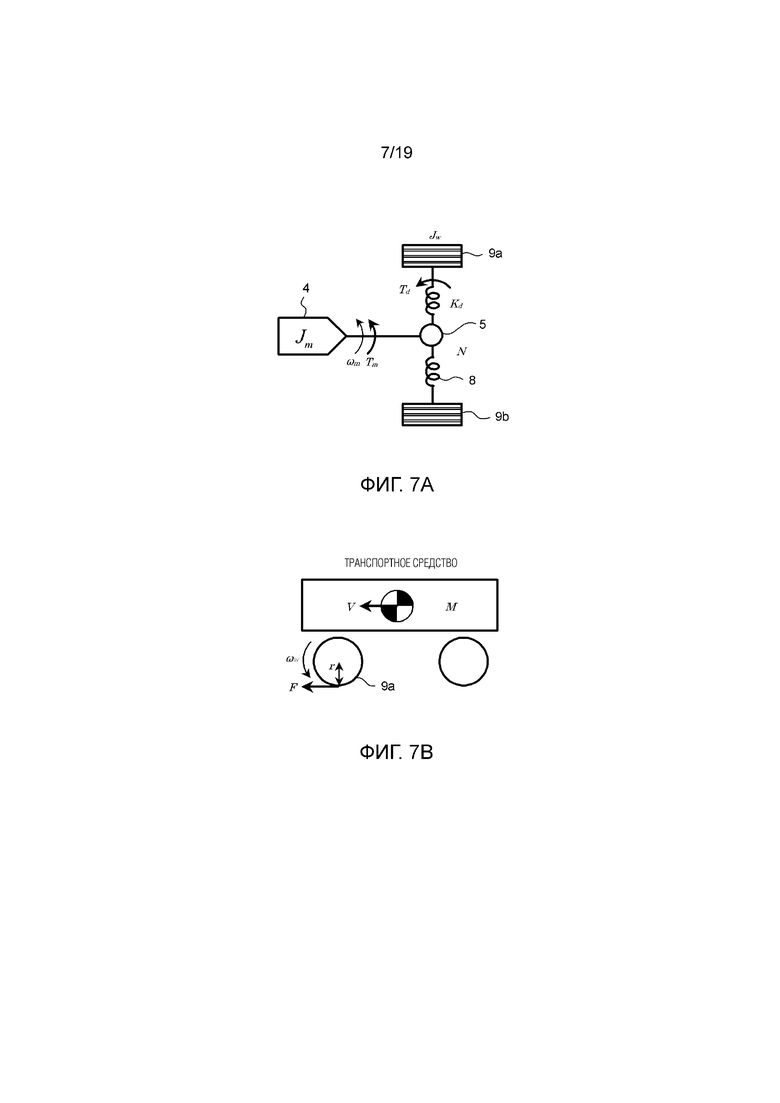






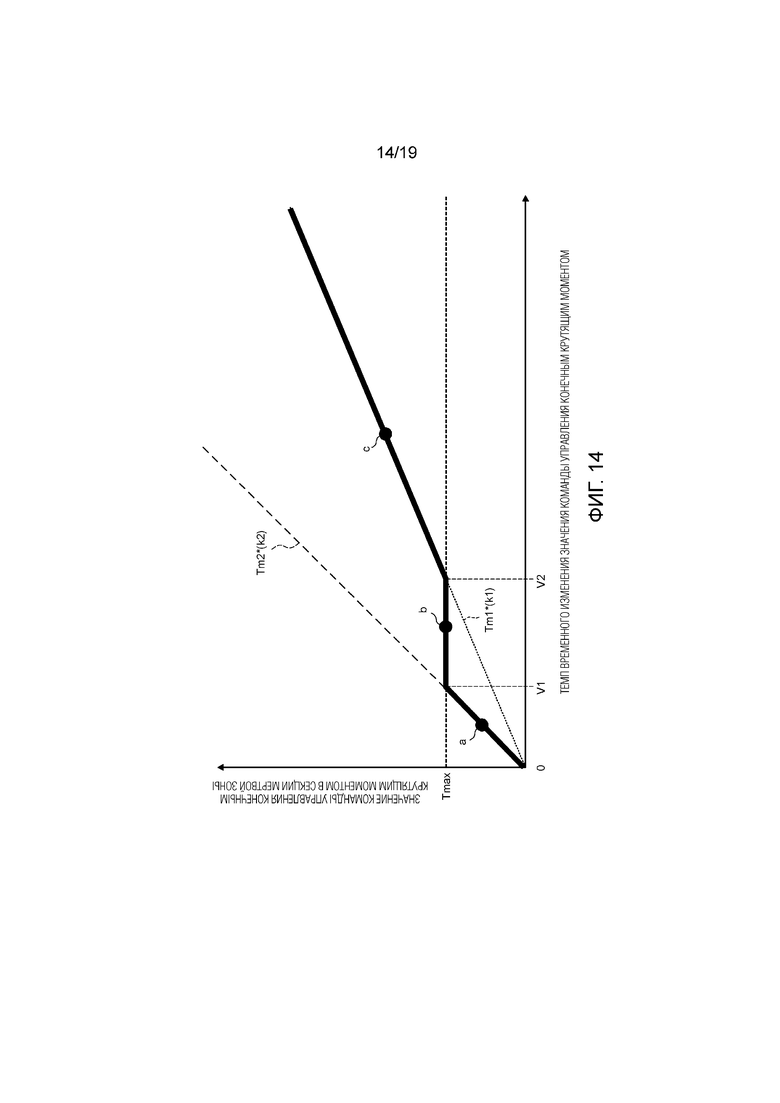

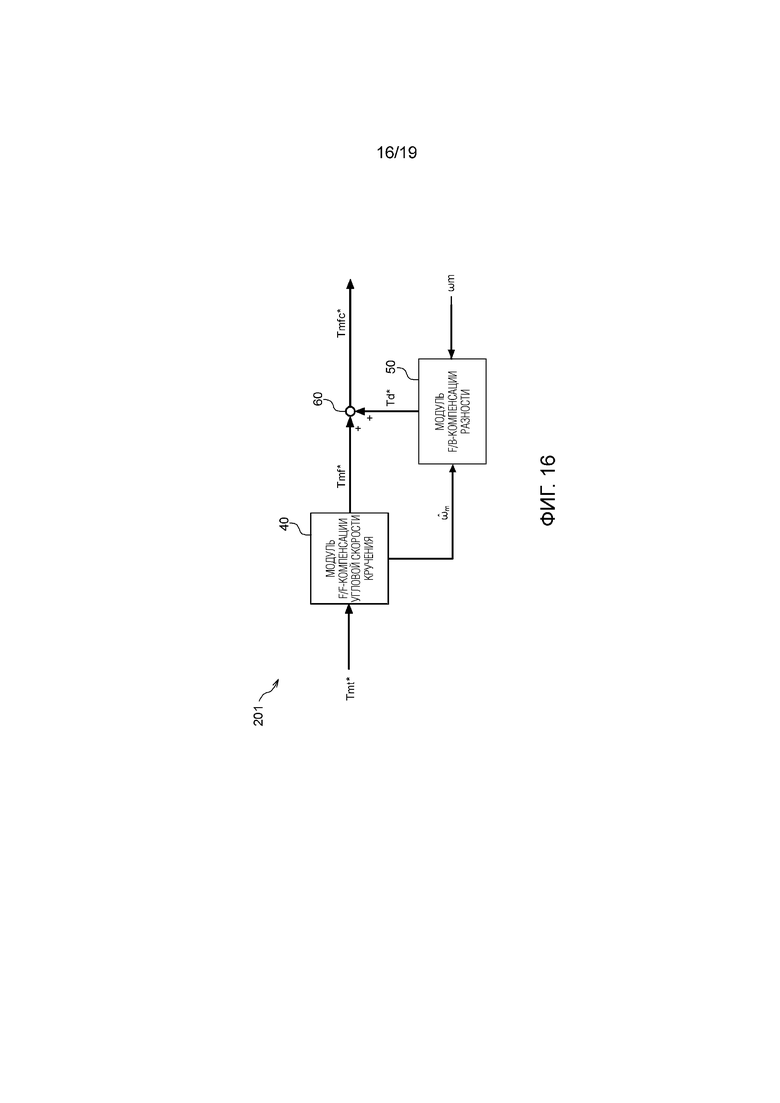



Изобретение относится к транспортным средствам. В способе управления мотором транспортного средства для замедления электрического транспортного средства посредством рекуперативного торможения мотора, соединенного с ведущим валом ведущего колеса транспортного средства, вычисляют значение команды управления крутящим моментом для подавления компонента вибрации ведущего вала посредством воздействия по каналу обратной связи угловой скорости кручения ведущего вала на требуемый крутящий момент, который определяет мощность мотора. Далее оценивают участок мертвой зоны, на котором крутящий момент мотора не передается на ведущий вал, на основании требуемого крутящего момента. Затем ограничивают значение команды управления крутящим моментом в случае, если транспортное средство оценивается как находящееся на участке мертвой зоны, и управляют работой мотора на основании значения команды управления крутящим моментом. Снижается шум и вибрация. 2 н. и 4 з.п. ф-лы, 19 ил.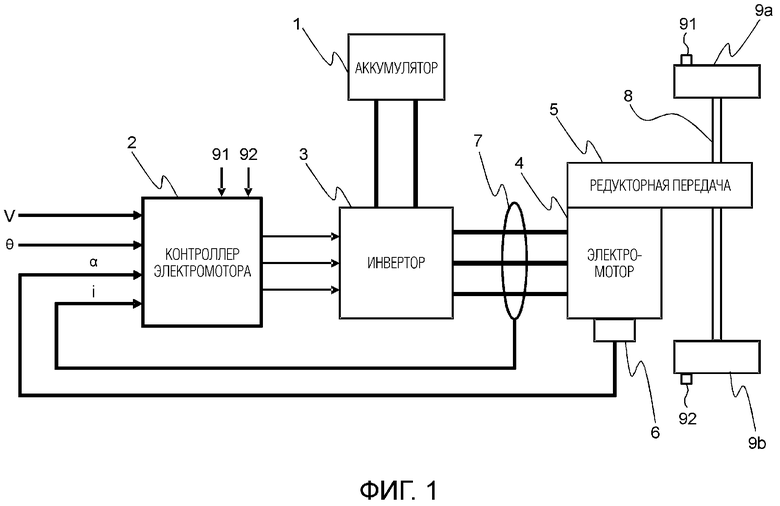
1. Способ управления мотором транспортного средства для замедления электрического транспортного средства посредством рекуперативного торможения мотора, соединенного с ведущим валом ведущего колеса транспортного средства, содержащий:
- этап вычисления, на котором вычисляют значение команды управления крутящим моментом для подавления компонента вибрации ведущего вала посредством воздействия по каналу обратной связи угловой скорости кручения ведущего вала на требуемый крутящий момент, который определяет мощность мотора;
- этап оценки, на котором оценивают участок мертвой зоны, на котором крутящий момент мотора в транспортном средстве не передается на ведущий вал, на основании требуемого крутящего момента;
- этап ограничения, на котором ограничивают значение команды управления крутящим моментом в случае, если транспортное средство оценивается как находящееся на участке мертвой зоны; и
- этап управления, на котором управляют работой мотора на основании значения команды управления крутящим моментом.
2. Способ управления мотором транспортного средства по п. 1, в котором:
- на этапе вычисления
- значение команды управления крутящим моментом вычисляется посредством вычитания значения, которое получается посредством умножения угловой скорости кручения на усиление обратной связи, из требуемого крутящего момента, и
- на этапе ограничения
- усиление обратной связи уменьшается для увеличения скорости отклика мотора в случае, если транспортное средство оценивается как находящееся на участке мертвой зоны.
3. Способ управления мотором транспортного средства по п. 1 или 2, содержащий:
- этап обнаружения, на котором обнаруживают угловую скорость вращения мотора;
- этап обработки, на котором принимают значение команды управления крутящим моментом и выводят оцененное значение угловой скорости вращения мотора и оцененное значение угловой скорости кручения, используемое на этапе вычисления, посредством использования модели транспортного средства, моделирующей характеристику отклика транспортного средства; и
- этап коррекции, на котором корректируют значение команды управления крутящим моментом на основании угловой скорости вращения мотора и оцененного значения угловой скорости вращения.
4. Способ управления мотором транспортного средства по п. 3, в котором:
- на этапе оценки
- оцененное значение угла кручения ведущего вала вычисляется с использованием модели транспортного средства, и то, находится ли транспортное средство на участке мертвой зоны, определяется согласно оцененному значению.
5. Способ управления мотором транспортного средства по п. 2, в котором:
- на этапе вычисления
- в случае если транспортное средство оценено как не находящееся на участке мертвой зоны, угловая скорость кручения умножается на первое усиление обратной связи для вычисления за счет этого значения команды управления первым крутящим моментом,
- в случае если транспортное средство оценено как находящееся на участке мертвой зоны, угловая скорость кручения умножается на второе усиление обратной связи, которое меньше первого усиления обратной связи, для вычисления за счет этого значения команды управления вторым крутящим моментом, и
- на этапе управления значение, полученное посредством ограничения значения команды управления вторым крутящим моментом заданным диапазоном на этапе ограничения, либо значение команды управления первым крутящим моментом, в зависимости от того, какое значение больше, задается в качестве значения команды управления крутящим моментом.
6. Устройство управления мотором транспортного средства для замедления электрического транспортного средства посредством рекуперативного торможения мотора, соединенного с ведущим валом ведущего колеса транспортного средства, содержащее:
- модуль вычисления, который вычисляет значение команды управления крутящим моментом для подавления компонента вибрации ведущего вала посредством воздействия по каналу обратной связи угловой скорости кручения ведущего вала на требуемый крутящий момент, который определяет мощность мотора;
- модуль управления, который управляет работой мотора на основании значения команды управления крутящим моментом;
- модуль оценки, который оценивает участок мертвой зоны, на котором крутящий момент мотора в транспортном средстве не передается на ведущий вал, на основании требуемого крутящего момента; и
- модуль ограничения, который ограничивает значение команды управления крутящим моментом в случае, если транспортное средство находится на участке мертвой зоны.
| WO 2013157315 A1, 24.10.2013 | |||
| WO 2014115626 A1, 31.07.2014 | |||
| WO 2016021059 A1, 11.02.2016 | |||
| JP 9233878 A, 05.09.1997 | |||
| JP 2002152916 A, 24.05.2002. |

