Уровень техники
[0001] Подсистемы транспортного средства часто питаются при включении зажигания транспортного средства. Некоторые подсистемы, такие как подсветки внутренней области, могут включаться, даже если питание транспортного средства иным образом отключено. Подсветки внутренней области, например, могут включаться при открытии одной из дверей. Другие подсистемы, подобные развлекательной системе, могут оставаться включенными в течение короткого времени после выключения зажигания транспортного средства.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
В настоящей заявке раскрывается система транспортного средства, содержащая: устройство обработки, запрограммированное с возможностью определения состояния зажигания, определения скорости транспортного средства и питания по меньшей мере одной подсистемы транспортного средства, если состояние зажигания отключено, и скорость транспортного средства выше заданного порогового значения. Причем устройство обработки запрограммировано с возможностью отключения по меньшей мере одной подсистемы транспортного средства, если скорость транспортного средства ниже заданного порогового значения. Причем отключение по меньшей мере одной подсистемы транспортного средства включает в себя отключение питания по меньшей мере одной подсистемы транспортного средства. Причем устройство обработки запрограммировано с возможностью определения состояния ключа. Причем устройство обработки запрограммировано с возможностью определения состояния зажигания независимо от состояния ключа. Причем устройство обработки запрограммировано с возможностью питания по меньшей мере одной подсистемы транспортного средства по меньшей мере частично на основе состояния ключа. Причем определение состояния ключа включает в себя определение по меньшей мере одного из предыдущего состояния ключа и текущего состояния ключа. Причем устройство обработки запрограммировано с возможностью осуществления ситуационной коррекции. Причем устройство обработки запрограммировано с возможностью осуществления ситуационной коррекции в ответ на ввод пользователя. Причем ситуационная коррекция включает в себя по меньшей мере одну из коррекции буксировки, коррекции припаркованного транспортного средства, коррекции режима сборки и коррекции удаленного запуска. Причем коррекция буксировки включает в себя первую коррекцию буксировки, где в транспортном средстве присутствует водитель и/или пассажир, и вторую коррекцию буксировки, где в транспортном средстве отсутствуют водитель и/или пассажиры.
Также в настоящей заявке раскрывается способ, содержащий этапы, на которых: определяют состояние зажигания транспортного средства; определяют скорость транспортного средства; сравнивают скорость транспортного средства с заданным пороговым значением; и питают по меньшей мере одну подсистему транспортного средства, если состояние зажигания отключено, и скорость транспортного средства выше заданного порогового значения. Причем способ дополнительно содержит этап, на котором отключают по меньшей мере одну подсистему транспортного средства, если скорость транспортного средства ниже заданного порогового значения. Причем отключение по меньшей мере одной подсистемы транспортного средства включает в себя этап, на котором отключают питание по меньшей мере одной подсистемы транспортного средства. Причем способ дополнительно содержит этап, на котором осуществляют ситуационную коррекцию. Причем способ дополнительно содержит этап, на котором принимают ввод пользователя, и причем ситуационную коррекцию осуществляют в ответ на прием ввода пользователя. Причем ситуационная коррекция включает в себя по меньшей мере одну из коррекции буксировки, коррекции припаркованного транспортного средства, коррекции режима сборки и коррекции удаленного запуска. Причем осуществление коррекции буксировки включает в себя этапы, на которых: определяют, присутствует ли водитель и/или пассажир в транспортном средстве; и осуществляют первую коррекцию буксировки, если в транспортном средстве присутствует водитель и/или пассажир, и вторую коррекцию буксировки, если в транспортном средстве отсутствуют водитель и/или пассажиры.
Также в настоящей заявке предлагается система транспортного средства, содержащая: устройство обработки, запрограммированное с возможностью определения состояния зажигания, определения состояния ключа независимо от состояния зажигания, определения скорости транспортного средства и питания по меньшей мере одной подсистемы транспортного средства по меньшей мере частично на основе состояния зажигания, состояния ключа и того, находится ли скорость транспортного средства выше заданного порогового значения, причем устройство обработки дополнительно запрограммировано с возможностью отключения по меньшей мере одной подсистемы транспортного средства, если скорость транспортного средства ниже заданного порогового значения, причем устройство обработки запрограммировано с возможностью осуществления ситуационной коррекции в ответ на ввод пользователя.
Краткое описание чертежей
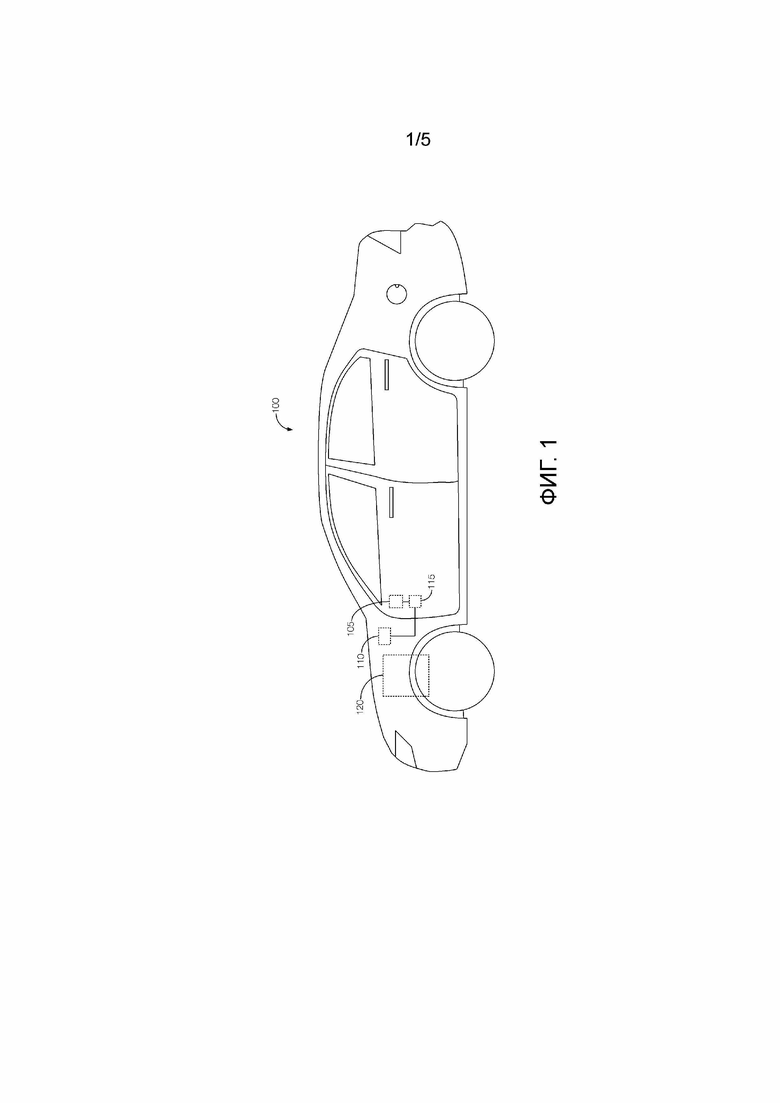
[0002] Фиг. 1 иллюстрирует примерное транспортное средство, осуществляющее модуль управления питанием для обеспечения питания некоторых подсистем транспортного средства при определенных обстоятельствах.
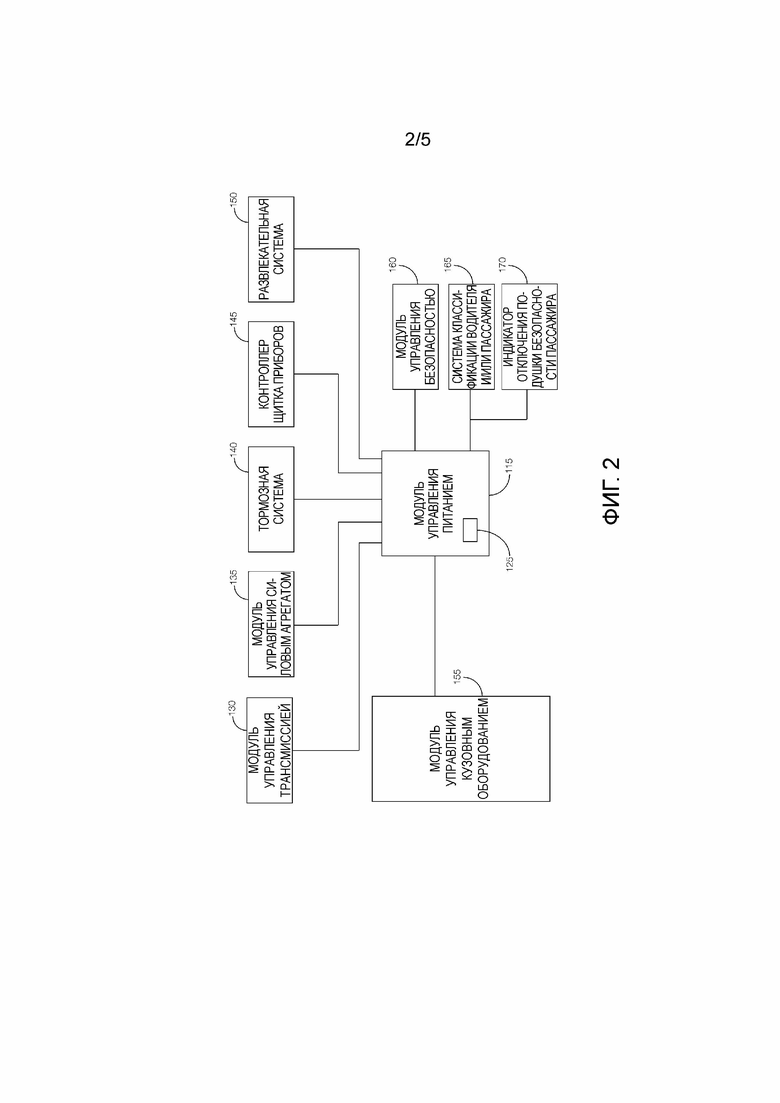
[0003] Фиг. 2 представляет собой блок-схему примерного модуля управления питанием и подсистем транспортного средства.
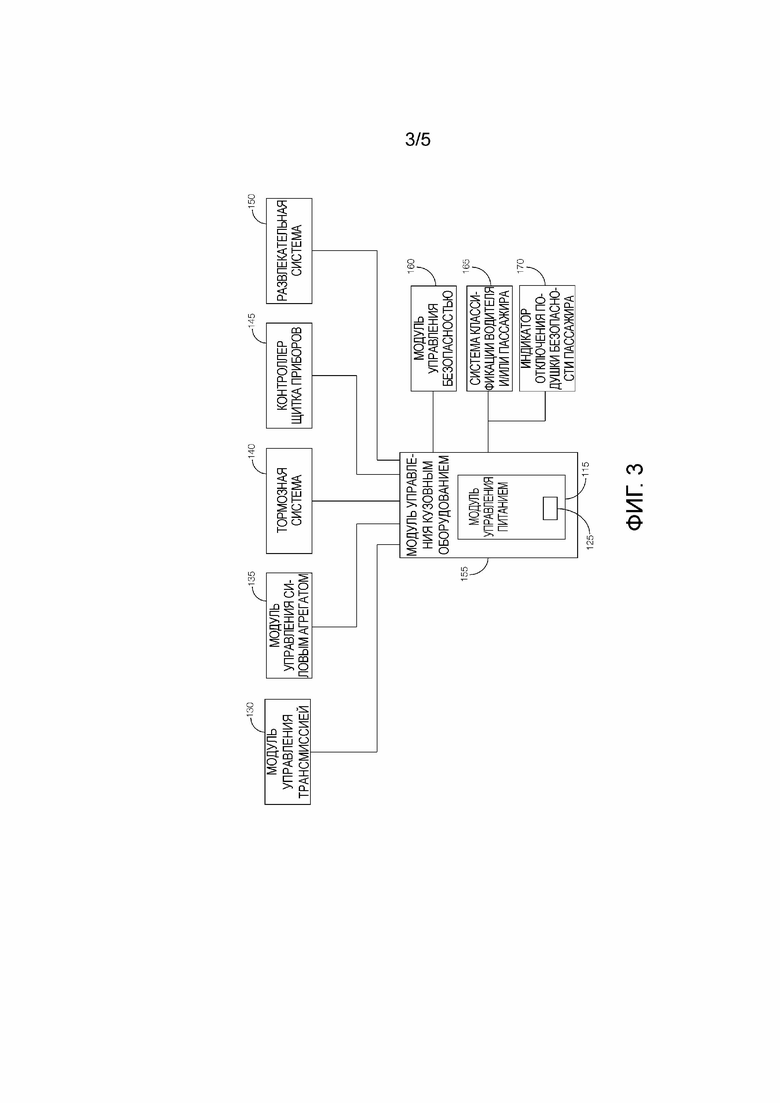
[0004] Фиг. 3 представляет собой блок-схему модуля управления питанием, включенного в модуль управления кузовным оборудованием.
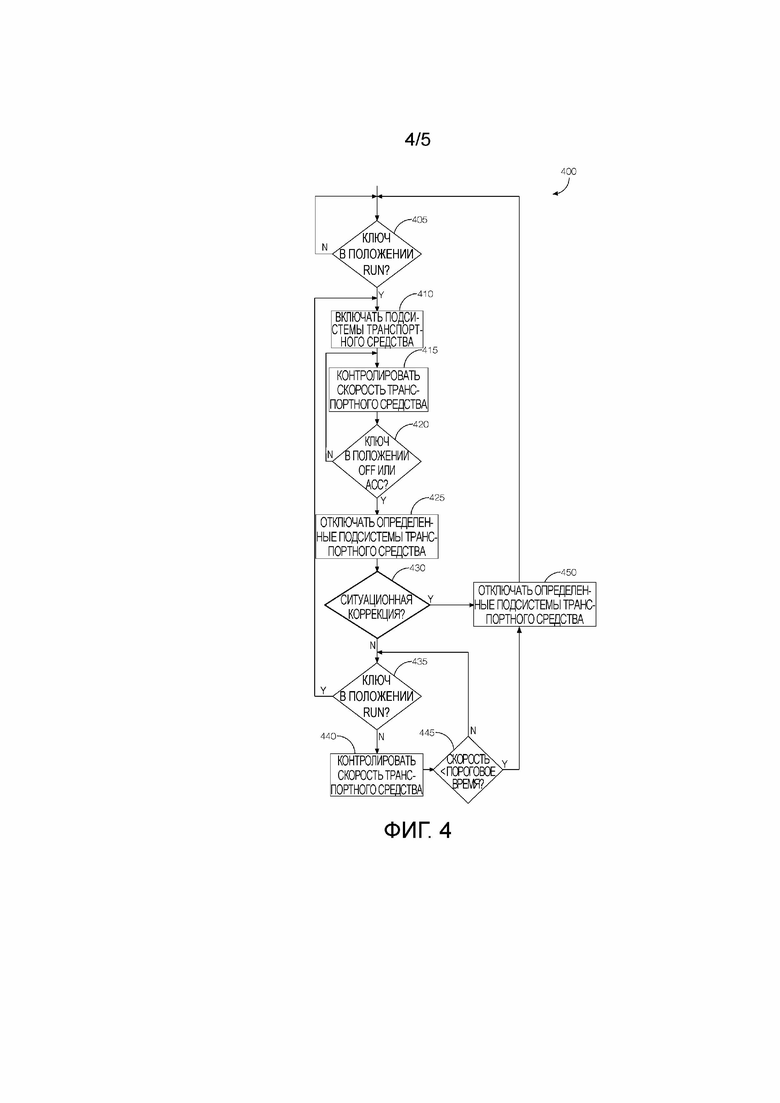
[0005] Фиг. 4 представляет собой блок-схему примерного процесса, который может выполняться модулем управления питанием для обеспечения питания определенных подсистем транспортного средства при определенных обстоятельствах.
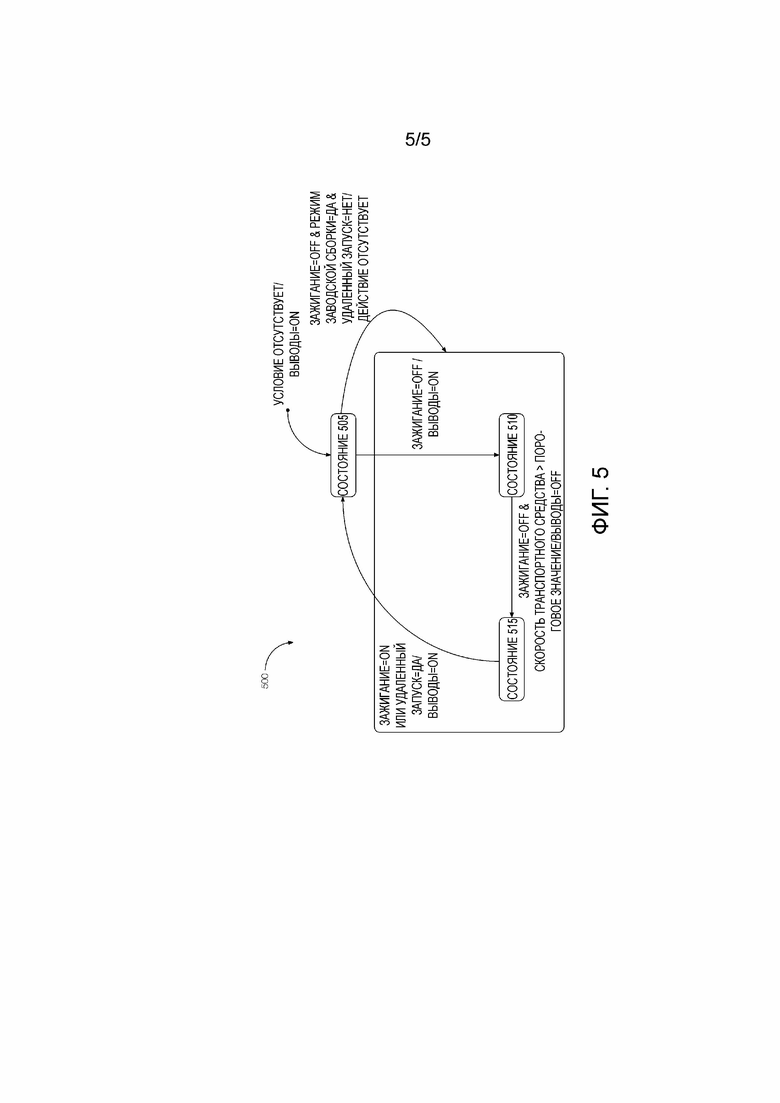
[0006] Фиг. 5 представляет собой примерный автомат с конечным числом состояний, показывающий возможные состояния модуля управления питанием.
Подробное описание
[0007] Выключение зажигания транспортного средства часто предполагается как целенаправленное, то есть предполагается, что водитель намеревается выключать подсистемы транспортного средства и выходить из транспортного средства. Если система зажигания выходит из строя или иным образом непреднамеренно выключается при перемещении транспортного средства, некоторые подсистемы и их соответствующая функциональность могут быть непреднамеренно отключены вследствие этого. Один путь предотвращения выключения определенных подсистем после выхода из строя системы зажигания при перемещении транспортного средства включает в себя устройство обработки, запрограммированное с возможностью определения состояния зажигания и скорости транспортного средства. Устройство обработки питает по меньшей мере одну подсистему транспортного средства, если состояние зажигания отключено, и скорость транспортного средства выше заданного порогового значения. Устройство обработки может отключать подсистему транспортного средства, когда скорость транспортного средства падает ниже заданного порогового значения.
[0008] Показанные элементы могут принимать многие различные формы и включать в себя множественные и/или альтернативные компоненты и средства. Проиллюстрированные примерные компоненты не предназначены быть ограничивающими. Более того, могут быть использованы дополнительные или альтернативные компоненты и/или варианты выполнения.
[0009] Как проиллюстрировано на Фиг. 1, главное транспортное средство 100 включает в себя систему 105 зажигания, аккумуляторную батарею 110 и модуль 115 управления питанием. Несмотря на то, что проиллюстрировано в виде седана, главное транспортное средство 100 может включать в себя любой пассажирский или коммерческий автомобиль, такой как машина, грузовой автомобиль, спортивно-утилитарное транспортное средство, транспортное средство в виде кроссовера, фургон, минифургон, такси, автобус и т.д. В некоторых возможных подходах главное транспортное средство 100 представляет собой автономное транспортное средство, выполненное с возможностью работы в автономном режиме (например, без водителя), частично автономном режиме и/или неавтономном режиме.
[0010] Система 105 зажигания может включать в себя гнездо зажигания, расположенное в пассажирском салоне главного транспортного средства 100. Гнездо зажигания может быть выполнено с возможностью приема ключа. Ключ может использоваться для приведения системы 105 зажигания в несколько различных состояний, которые рассмотрены более подробно ниже. Главное транспортное средство 100 может работать в соответствии с состоянием зажигания. Альтернативно или в дополнение, состояние зажигания также может быть определено в соответствии с системой бесключевого доступа или системой бесключевого запуска, иногда называемой системой пассивного доступа/пассивного запуска.
[0011] Аккумуляторная батарея 110 может включать в себя любое количество устройств, выполненных с возможностью обеспечения электрической энергии для одной или более подсистем транспортного средства. Посредством химических реакций аккумуляторная батарея 110 может генерировать электрический заряд. Химические реакции могут происходить в нескольких ячейках, размещенных последовательно или параллельно. Электропроводящие выводы могут быть расположены на корпусе аккумуляторной батареи. Электрическая энергия может быть обеспечена для подсистем транспортного средства, соединенных либо непосредственно, либо опосредованно, с выводами. Питание от аккумуляторной батареи может быть выборочно обеспечено для определенных подсистем транспортного средства, которые рассмотрены более подробно ниже.
[0012] Модуль 115 управления питанием может включать в себя любое вычислительное устройство, имеющее устройство 125 обработки, запрограммированное с возможностью определения состояния зажигания и скорости транспортного средства. Состояние зажигания может быть определено на основе состояния ключа, например, положения ключа в гнезде зажигания. Примерные состояния ключа и в связи с этим состояния зажигания могут включать в себя состояние RUN (работы), состояние ACC и состояние отключено. Состояние RUN может указывать на намерение водителя включать двигатель транспортного средства и все подсистемы транспортного средства. Состояние ACC может указывать на желание водителя включать определенные подсистемы транспортного средства (например, вспомогательные средства), но оставлять выключенным двигатель транспортного средства. Состояние отключено может указывать на желание водителя выключать двигатель и большинство или все подсистемы транспортного средства.
[0013] Модуль 115 управления питанием может быть запрограммирован с возможностью определения или отслеживания прошлых состояний ключа. То есть модуль 115 управления питанием может определять текущее состояние ключа на основе настоящего положения ключа в гнезде зажигания и предыдущее состояние ключа на основе предыдущего положения ключа в гнезде зажигания. В качестве примера, текущее состояние ключа может представлять собой состояние RUN (работы), а предыдущее состояние ключа может представлять собой состояние OFF (отключено) или ACC. В другом примере текущее состояние ключа может включать в себя состояние OFF, а предыдущее состояние ключа может представлять собой состояние RUN или ACC.
[0014] В некоторых примерах состояние ключа может не точно отражать состояние зажигания. Например, состояние ключа может представлять собой RUN (т.е. ключ находится в гнезде зажигания в положении RUN), но зажигание может быть выключено. В связи с этим модуль 115 управления питанием может быть запрограммирован с возможностью определения состояния зажигания независимо от состояния ключа и наоборот.
[0015] Некоторые подсистемы транспортного средства, такие как внутренняя и внешняя подсветки, развлекательная система и т.д., могут оставаться включенными в течение ограниченного периода времени, даже если состояние зажигания OFF. Скорость транспортного средства может определяться на основе, например, контроллера, такого как контроллер силового агрегата, антиблокировочной тормозной системы (ABS) или другого модуля/датчика (смотри Фиг. 2). Модуль 115 управления питанием может выборочно обеспечивать питание от аккумуляторной батареи 110 одной или более подсистем транспортного средства на основе предполагаемого состояния зажигания и скорости транспортного средства. Например, если состояние зажигания OFF , но главное транспортное средство 100 по-прежнему перемещается (например, скорость транспортного средства выше заданного порогового значения), модуль 115 управления питанием может продолжать питать определенные подсистемы транспортного средства, которые описаны более подробно ниже. После падения скорости транспортного средства ниже заданного порогового значения, однако, модуль 115 управления питанием может быть запрограммирован с возможностью отключения одной или более подсистем транспортного средства, которые оставались включенными. Отключение подсистем транспортного средства может включать в себя, например, отсоединение этих подсистем транспортного средства от аккумуляторной батареи 110 для отключения питания. Если зажигание включается снова до падения скорости до заданного порогового значения, или если скорость находится ниже заданного порогового значения только в течение короткого периода времени, модуль 115 управления питанием может продолжать питать подсистемы транспортного средства, как если бы зажигание никогда не выключалось.
[0016] Модуль 115 управления питанием может быть запрограммирован с возможностью осуществления ситуационной коррекции. Ситуационная коррекция может осуществляться, например, в ответ на ввод пользователя или ситуацию, обнаруженную на основе сигналов датчика. Примерные ситуационные коррекции могут включать в себя коррекцию припаркованного транспортного средства, коррекцию буксировки, коррекцию режима сборки и коррекцию удаленного запуска. Ситуационная коррекция может изменять работу модуля 115 управления питанием. Например, ситуационная коррекция может заставлять модуль 115 управления питанием позволять определенным или всем подсистемам выключаться при определенных обстоятельствах. При нормальной работе модуль 115 управления питанием может питать подсистемы транспортного средства при непреднамеренном или непредвиденном выключении зажигания. С помощью ситуационных коррекций модуль 115 управления питанием может позволять или заставлять одну или более подсистем транспортного средства отключаться от питания независимо от состояния ключа и состояния зажигания.
[0017] Коррекция припаркованного транспортного средства может осуществляться, когда главное транспортное средство 100 припарковано, и зажигание выключено. Если главное транспортное средство 100 начинает катиться, модуль 115 управления питанием может быть запрограммирован с возможностью не питать никакие подсистемы транспортного средства.
[0018] Коррекция буксировки может осуществляться, когда главное транспортное средство 100 буксируется. При первом режиме коррекции буксировки, который может возникать, когда зажигание выключено, в главном транспортном средстве 100 отсутствуют пассажиры, и главное транспортное средство 100 буксируется, модуль 115 управления питанием может быть запрограммирован с возможностью не питать никакие подсистемы транспортного средства. Второй режим коррекции буксировки может возникать, когда присутствует пассажир, и главное транспортное средство 100 буксируется. Один путь обнаружения пассажира может включать в себя прием ввода пользователя с помощью устройства пользовательского интерфейса или наличие включения пользователем зажигания в состояние RUN , или датчик обнаружения водителя и/или пассажира. Так как пассажир находится в главном транспортном средстве 100, модуль 115 управления питанием может питать определенные подсистемы, такие как система безопасности, система подушки безопасности и т.д.
[0019] Коррекция режима сборки может осуществляться, когда главное транспортное средство 100 перемещается как часть процесса производства или ремонта. В связи с этим модуль 115 управления питанием может быть запрограммирован с возможностью не питать никакие подсистемы транспортного средства, когда главное транспортное средство 100 подвергается процессу производства или ремонта, который будет заставлять главное транспортное средство 100 перемещаться при выключенном зажигании.
[0020] Коррекция удаленного запуска может осуществляться, когда главное транспортное средство 100 было запущено удаленно. Удаленный запуск может происходить, когда двигатель запускается с удаленного передатчика, и без кого-либо в главном транспортном средстве 100 или без ключа в зажигании. При осуществлении коррекции удаленного запуска модуль 115 управления питанием может ограничивать некоторые подсистемы транспортного средства, такие как подсистема обнаружения столкновения. Более того, модуль 115 управления питанием может быть запрограммирован с возможностью отключения топливного насоса после обнаружения столкновения, когда главное транспортное средство 100 находится в режиме удаленного запуска.
[0021] Модуль 115 управления питанием может быть дополнительно запрограммирован с возможностью работы в режиме диагностики. Находясь в режиме диагностики, модуль 115 управления питанием может обеспечивать диагностическую информацию для одной или более подсистем транспортного средства. Диагностическая информация может быть обнаружена во время загрузки и может быть основана на информации о завершении с предыдущего цикла ключа. Другими словами, диагностическая информация для особого цикла ключа может становиться доступной в следующем цикле ключа. Функциональность модуля 115 управления питанием может быть обнаружена при завершении цикла питания так, что диагностическая информация может сообщаться в следующем цикле зажигания. Если питание недоступно по запросу, однако, диагностическая информация может быть предоставлена во время текущего цикла зажигания. Модуль 115 управления питанием может хранить некоторое количество состояний расширенного режима для извлечения впоследствии.
[0022] В режиме диагностики модуль 115 управления питанием может обеспечивать диагностическую информацию, например, для модуля 160 управления безопасностью. Канал Pass Thru может быть оценен до того, как модуль 115 управления питанием активирует питание модуля 160 управления безопасностью, системы 165 классификации водителя и/или пассажира или индикатора 170 отключения подушки безопасности пассажира, предоставляя диагностическую информацию модулю 160 управления безопасностью во время текущего цикла ключа. Однако, так как канал питания модуля 115 управления питанием может быть оценен после изменения состояния зажигания на OFF, эта диагностическая информация для модуля 160 управления безопасностью может задерживаться до следующего цикла ключа. Сообщение о неисправности модулю 160 управления безопасностью может выполняться следующим образом. Может передаваться сигнал CAN, указывающий на обнаружение модулем 115 управления питанием неисправности на входах, выходах или проходах. Сигнал CAN может распространяться, даже если модуль 160 управления безопасностью может быть не способен принимать сигналы (например, модуль 160 управления безопасностью не имеет питания или иным образом вышел из строя). Сигнал CAN от модуля 115 управления питанием может включать в себя неисправность для, например, обработки модулем 160 управления безопасностью. Модуль 160 управления безопасностью может сообщать информацию о неисправности системы щитку с помощью сигналов CAN (например, подсветки подушки безопасности). Если сигнал от модуля 160 управления безопасностью к щитку отсутствует, щиток может включать подсветку подушки безопасности.
[0023] В общем на Фиг. 2 и 3 линии, соединяющие компоненты, могут представлять передачу информации, питания или и того, и другого. Фиг. 2 представляет собой блок-схему примерного модуля 115 управления питанием и подсистем транспортного средства. Показанные подсистемы транспортного средства включают в себя модуль 130 управления трансмиссией, модуль 135 управления силовым агрегатом, тормозную систему 140, контроллер 145 щитка, развлекательную систему 150, модуль 155 управления кузовным оборудованием, модуль 160 управления безопасностью, систему 165 классификации водителя и/или пассажира и индикатор 170 отключения подушки безопасности пассажира. Другие подсистемы, не показанные, могут быть дополнительно включены в главное транспортное средство 100 и могут работать в соответствии с модулем 115 управления питанием. Примеры других потенциальных подсистем могут включать в себя, например, подсистему рулевого управления с усилителем, подсистему двери и окна с электроприводом и т.д. Модуль 115 управления питанием может дополнительно включать в себя устройство 125 обработки, которое рассмотрено выше в отношении Фиг. 1.
[0024] Модуль 130 управления трансмиссией может включать в себя любое вычислительное устройство, запрограммированное с возможностью управления работой трансмиссии транспортного средства. Модуль 135 управления силовым агрегатом может включать в себя любое вычислительное устройство, запрограммированное с возможностью управления работой одного или более компонентов силового агрегата транспортного средства. Тормозная система 140 может включать в себя любое вычислительное устройство, запрограммированное с возможностью управления работой тормозов транспортного средства. Контроллер 145 щитка может включать в себя любое вычислительное устройство, запрограммированное с возможностью управления работой компонентов щитка приборов. Развлекательная система 150 может включать в себя любое вычислительное устройство и устройство пользовательского интерфейса, запрограммированные с возможностью, например, обеспечения медиа-контента для водителя и/или пассажиров транспортного средства. Модуль 155 управления кузовным оборудованием может включать в себя любое вычислительное устройство, запрограммированное с возможностью управления работой аккумуляторной батареи 110 транспортного средства. Модуль 160 управления безопасностью может включать в себя любое вычислительное устройство, запрограммированное с возможностью управления работой системы безопасности транспортного средства, включающей в себя ремни безопасности и подушки безопасности. Система 165 классификации водителя и/или пассажира может включать в себя любое вычислительное устройство и датчики, запрограммированные с возможностью обнаружения и возможно идентификации одного или более водителя и/или пассажиров транспортного средства. Индикатор 170 отключения подушки безопасности пассажира может включать в себя визуальное оповещение, которое, например, подсвечивается, для указания, выключена ли подушка безопасности пассажира.
[0025] Устройство 125 обработки может принимать в качестве вводов состояние зажигания и скорость транспортного средства, которые рассмотрены выше. Устройство 125 обработки может быть запрограммировано с возможностью питания одной или более подсистем транспортного средства, если состояние зажигания OFF, и скорость транспортного средства выше заданного порогового значения. Например, устройство 125 обработки может определять состояние зажигания на основе состояния ключа. Альтернативно, модуль 115 управления питанием может быть запрограммирован с возможностью определения состояния зажигания независимо от состояния ключа, и наоборот, для обеспечения примеров, где, например, состояние ключа не точно отражает рабочее состояние зажигания. Как показано на Фиг. 2, устройство 125 обработки может быть запрограммировано с возможностью подачи команды модулю 155 управления кузовным оборудованием на обеспечение питания модуля 160 управления безопасностью, системы 165 классификации водителя и/или пассажира, индикатора 170 отключения подушки безопасности пассажира, а также других подсистем транспортного средства, когда скорость транспортного средства выше заданного порогового значения. Если скорость транспортного средства падает ниже заданного порогового значения, устройство 125 обработки может быть запрограммировано с возможностью отключения одной или более из этих подсистем транспортного средства. Отключение подсистем транспортного средства может включать в себя, например, подачу команды модулю 155 управления кузовным оборудованием на отключение питания одной или более подсистем транспортного средства.
[0026] Фиг. 3 представляет собой блок-схему модуля 155 управления питанием, включенного в модуль 155 управления кузовным оборудованием. В этом примерном варианте выполнения модуль 155 управления питанием работает как «режим», в отличие от отдельного вычислительного устройства относительно модуля 155 управления кузовным оборудованием. Модуль 155 управления питанием может быть альтернативно или дополнительно включен в любое количество других подсистем или модулей управления транспортного средства.
[0027] Фиг. 4 представляет собой блок-схему примерного процесса 400, который может выполняться модулем 155 управления питанием для обеспечения питания определенных подсистем транспортного средства при определенных обстоятельствах. Процесс 400 могут инициировать при включении транспортного средства и могут продолжать выполнять до выключения транспортного средства и, например, удаления ключа из гнезда зажигания.
[0028] В блоке 405 принятия решений модуль 115 управления питанием может определять состояние зажигания транспортного средства. Например, устройство 125 обработки может определять, находится ли ключ в положении RUN в зажигании. Если это так, процесс 400 может переходить к блоку 410. В противном случае процесс 400 может продолжать выполнять блок 405 до тех пор, пока состояние зажигания не станет RUN .
[0029] В блоке 410 модуль 115 управления питанием может включать одну или более подсистем транспортного средства для работы. Включение подсистем транспортного средства может включать в себя питание по меньшей мере одной из подсистем транспортного средства путем, например, выборочного соединения одной или более подсистем транспортного средства с питанием от аккумуляторной батареи 110.
[0030] В блоке 415 модуль 115 управления питанием может начинать контролировать скорость транспортного средства. Устройство 125 обработки может определять скорость транспортного средства на основе, например, сигналов, выводимых контроллером, таким как контроллер силового агрегата.
[0031] В блоке 420 принятия решений модуль 115 управления питанием может повторно определять состояние зажигания транспортного средства. В особенности устройство 125 обработки может определять, находится ли ключ в положении OFF или ACC. Если это так, процесс 400 может переходить к блоку 420 принятия решений. В противном случае процесс 400 может возвращаться к блоку 415.
[0032] В блоке 425 модуль 115 управления питанием может отключать или иным образом позволять одной или более подсистемам транспортного средства выключаться. То есть модуль 115 управления питанием с помощью устройства 125 обработки может выборочно отключать питание одной или более подсистем транспортного средства.
[0033] В блоке 430 принятия решений модуль 115 управления питанием может определять, существуют ли какие-либо ситуационные коррекции. Ситуационную коррекцию могут осуществлять, например, в ответ на ввод пользователя или ситуацию, обнаруженную на основе сигналов датчика. Примерные ситуационные коррекции могут включать в себя коррекцию припаркованного транспортного средства, коррекцию буксировки, коррекцию режима сборки и коррекцию удаленного запуска. Различные ситуационные коррекции могут инициировать в ответ на различные критерии или обстоятельства, которые рассмотрены выше. Дополнительно, различные коррекции буксировки могут применять на основе, например, присутствия кого-нибудь в главном транспортном средстве 100. Таким образом, исходя из всех других критериев для осуществления существующей коррекции буксировки, первую коррекцию буксировки, рассмотренную выше, могут осуществлять, если в главном транспортном средстве 100 присутствует водитель и/или пассажир, при этом вторую коррекцию буксировки, рассмотренную выше, могут осуществлять, если в главном транспортном средстве 100 отсутствуют водитель и/или пассажиры. Если ситуационная коррекция существует, процесс 400 может переходить к блоку 450. Если ситуационные коррекции отсутствуют, процесс 400 может переходить к блоку 435.
[0034] В блоке 435 принятия решений модуль 115 управления питанием может повторно оценивать состояние зажигания транспортного средства. Например, устройство 125 обработки может определять, находится ли ключ в положении RUN в зажигании. Если это так, процесс 400 может возвращаться к блоку 410. В противном случае процесс 400 может продолжаться в блоке 440.
[0035] В блоке 440 модуль 115 управления питанием может начинать контролировать скорость транспортного средства. Устройство 125 обработки может определять скорость транспортного средства на основе, например, сигналов, выводимых контроллером, таким как контроллер силового агрегата. Процесс 400 может переходить к блоку 445 принятия решений.
[0036] В блоке 445 принятия решений модуль 115 управления питанием может определять, находится ли контролируемая скорость транспортного средства ниже заданного порогового значения в течение заданного количества времени. Например, устройство 125 обработки может сравнивать настоящую скорость транспортного средства с заданным пороговым значением и определять, перемещается ли главное транспортное средство 100 со скоростью менее, чем заданное пороговое значение, в течение более, чем заданное количество времени (например, 0,5 секунд). Если главное транспортное средство 100 перемещалось ниже заданного порогового значения в течение более, чем заданное количество времени, процесс 400 может переходить к блоку 450. Если главное транспортное средство 100 перемещалось ниже заданного порогового значения в течение менее, чем заданное количество времени, процесс 400 может переходить к блоку 435.
[0037] В блоке 450 модуль 115 управления питанием может отключать или иным образом позволять одной или более подсистемам транспортного средства выключаться. То есть модуль 115 управления питанием с помощью устройства 125 обработки может выборочно отключать питание одной или более подсистем транспортного средства, включающих в себя любую одну или более подсистем транспортного средства, остающихся включенными после блока 425.
[0038] Фиг. 5 представляет собой примерный автомат 500 с конечным числом состояний, показывающий возможные состояния модуля 115 управления питанием. Автомат с конечным числом состояний могут осуществлять с помощью, например, устройства 125 обработки. В состоянии 505 устройство 125 обработки может быть запрограммировано с возможностью вывода сигнала ON , который заставляет аккумуляторную батарею 110 обеспечивать питание одной или более подсистем транспортного средства. Состояние 510 могут инициировать в ответ на переключение состояния зажигания в положение OFF , при условии, что не были инициированы ситуационные коррекции. В состоянии 510 устройство 125 обработки может продолжать выводить сигнал ON . Состояние 515 могут инициировать из состояния 510 при условии, что зажигание остается выключенным, и скорость транспортного средства падает ниже заданного порогового значения, и в некоторых примерах, которые рассмотрены выше, падает ниже заданного порогового значения в течение заданного количества времени (например, 0,5 секунд). В состоянии 515 вывод устройства 125 обработки может переключаться на сигнал OFF, который, например, отключает питание от аккумуляторной батареи одной или более подсистем транспортного средства. Устройство 125 обработки может возвращаться в состояние 505 из состояния 515 если, например, зажигание включается, или запускают одну из ситуационных коррекций, таких как коррекция удаленного запуска. Когда устройство 125 обработки переходит в состояние 505, вывод устройства 125 обработки может переключаться с сигнала OFF на сигнал ON (включено).
[0039] В общем описанные вычислительные системы и/или устройства могут применять любые из нескольких операционных систем компьютера, включающих в себя, но никоим образом не ограниченных, версии и/или разновидности операционной системы Ford Sync®, операционной системы Microsoft Windows®, операционной системы Unix (например, операционной системы Solaris®, распространяемой Oracle Corporation, Redwood Shores, California), операционной системы AIX UNIX, распространяемой International Business Machines, Armonk, New York), операционной системы Linux, операционных систем Mac OSX и iOS, распространяемых Apple Inc., Cupertino, California, операционной системы BlackBerry, распространяемой Blackberry, Ltd., Waterloo, Canada, и операционной системы Android, разрабатываемой Google, Inc. и Open Handset Alliance. Примеры вычислительных устройств включают в себя, без ограничения, бортовой компьютер транспортного средства, компьютерную рабочую станцию, сервер, настольный компьютер, ноутбук, переносной компьютер или карманный компьютер или некоторую другую вычислительную систему и/или устройство.
[0040] Вычислительные устройства в общем включают в себя выполняемые компьютером инструкции, причем инструкции могут быть выполняемыми одним или более вычислительными устройствами, такими как устройства, перечисленные выше. Выполняемые компьютером инструкции могут компилироваться или интерпретироваться на основе компьютерных программ, создаваемых с использованием множества языков и/или технологий программирования, включающих в себя, без ограничения, и либо по отдельности, либо в совокупности, Java™, C, C++, Visual Basic, Java Script, Perl и т.д. В общем процессор (например, микропроцессор) принимает инструкции, например, из памяти, считываемой компьютером среды и т.д. и выполняет эти инструкции, тем самым выполняя один или более процессов, включающих в себя один или более из процессов, описанных здесь. Такие инструкции и другие данные могут храниться и передаваться с использованием множества считываемых компьютером сред.
[0041] Считываемая компьютером среда (также называемая считываемой процессором средой) включает в себя любую не временную (например, материальную) среду, которая участвует в обеспечении данных (например, инструкций), которые могут считываться компьютером (например, процессором компьютера). Такая среда может принимать многие формы, включающие в себя, но не ограниченные ими, энергонезависимые среды и энергозависимые среды. Энергонезависимые среды могут включать в себя, например, оптические или магнитные диски и другую постоянную память. Энергозависимые среды могут включать в себя, например, динамическую память с произвольным доступом (DRAM), которая обычно образует основную память. Такие инструкции могут передаваться одной или более средами передачи, включающими в себя коаксиальные кабели, медный провод и волоконную оптику, включающую в себя провода, которые содержат системную шину, соединенную с процессором компьютера. Общие формы считываемых компьютером сред включают в себя, например, флоппи-диск, гибкий диск, жесткий диск, магнитную ленту, любую другую магнитную среду, CD-ROM, DVD, любую другую оптическую среду, перфокарты, бумажную ленту, любую другую физическую среду со схемами отверстий, RAM, PROM, EPROM, FLASH-EEPROM, любую другую микросхему или картридж памяти или любую другую среду, с которой компьютер может считывать.
[0042] Базы данных, репозитории данных или другие хранилища данных, описанные здесь, могут включать в себя различные виды механизмов хранения, доступа и поиска различных видов данных, включающих в себя иерархическую базу данных, набор файлов в файловой системе, базу данных приложения в закрытом формате, систему управления реляционными базами данных (RDBMS) и т.д. Каждое такое хранилище данных в общем включено в вычислительное устройство, применяющее операционную систему компьютера, такую как одна из операционных систем, отмеченных выше, и является доступным по сети любым одним или более из множества образов. Файловая система может быть доступна из операционной системы компьютера и может включать в себя файлы, хранящиеся в различных форматах. RDBMS в общем применяет язык структурированных запросов (SQL) в дополнение к языку для создания, хранения, редактирования и выполнения хранящихся процедур, такому как язык PL/SQL, отмеченный выше.
[0043] В некоторых примерах элементы системы могут быть осуществлены в виде считываемых компьютером инструкций (например, программного обеспечения) на одном или более вычислительных устройств (например, серверах, персональных компьютерах и т.д.), хранящихся в считываемых компьютером средах, связанных с ними (например, дисках, устройствах памяти и т.д.). Компьютерный программный продукт может содержать такие инструкции, хранящиеся в считываемых компьютером средах, для выполнения функций, описанных здесь.
[0044] В отношении процессов, систем, способов, эвристических правил и т.д., описанных здесь, следует понимать, что, несмотря на то, что этапы таких процессов и т.д. были описаны как происходящие согласно определенной упорядоченной последовательности, такие процессы могут быть применены на практике с описанными этапами, выполняемыми в порядке, отличном от порядка, описанного здесь. Дополнительно следует понимать, что определенные этапы могут выполняться одновременно, что могут быть добавлены другие этапы, или что определенные этапы, описанные здесь, могут быть исключены. Другими словами, описания процессов здесь обеспечены с целью иллюстрации определенных вариантов выполнения, и никоим образом не должны истолковываться так, чтобы ограничивать формулу изобретения.
[0045] Соответственно, следует понимать, что вышеуказанное описание предназначено быть иллюстративным, а не ограничительным. Многие варианты выполнения и применения, отличные от обеспеченных примеров, будут ясны при прочтении вышеуказанного описания. Объем охраны следует определять не со ссылкой на вышеуказанное описание, но вместо этого следует определять со ссылкой на приложенную формулу изобретения вместе с полным объемом эквивалентов, на которые такая формула изобретения имеет право. Предполагается и имеется в виду, что последующие разработки будут возникать в технологиях, рассмотренных здесь, и что раскрытые системы и способы будут включены в такие последующие варианты выполнения. В общем следует понимать, что применение способно к преобразованию и изменению.
[0046] Все выражения, используемые в формуле изобретения, предназначены иметь их обычные значения, которые понятны специалисту в области техники, описанной здесь, кроме тех случаев, когда здесь выполнено явное указание на обратное. В частности, использование выражения «указанный» и т.д. следует понимать перечисляющим один или более из указанных элементов, кроме тех случаев, когда пункт формулы изобретения излагает явное ограничение на обратное.
[0047] Реферат обеспечен, чтобы позволить читателю быстро выявлять характер технического раскрытия. Он представлен с пониманием того, что он не будет использоваться для интерпретации или ограничения объема охраны или смысла формулы изобретения. В дополнение, в вышеупомянутом подробном описании видно, что различные признаки сгруппированы вместе в различных вариантах выполнения с целью упрощения раскрытия. Этот способ раскрытия не следует интерпретировать как отражающий намерение того, что заявленные варианты выполнения требуют больше признаков, чем явно изложено в каждом пункте формулы изобретения. Наоборот, как отражает следующая далее формула изобретения, объект изобретения заключается не во всех признаках одного раскрытого варианта выполнения. Таким образом, следующая далее формула изобретения тем самым включена в подробное описание, причем каждый пункт является самостоятельным как отдельно заявленный объект изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА И СПОСОБ УПРАВЛЕНИЯ ПИТАНИЕМ ТРАНСПОРТНОГО СРЕДСТВА | 2016 |
|
RU2720021C2 |
| СИСТЕМА АДАПТИВНОГО ИНТЕРФЕЙСА ТРАНСПОРТНОГО СРЕДСТВА (ВАРИАНТЫ) | 2016 |
|
RU2682102C2 |
| СПОСОБ И СИСТЕМА УПРАВЛЕНИЯ ШТОРКОЙ РЕШЕТКИ РАДИАТОРА | 2017 |
|
RU2689911C2 |
| СПУТНИКОВАЯ ОХРАННО-ПОИСКОВАЯ СИСТЕМА | 2013 |
|
RU2528090C1 |
| АДАПТИВНОЕ ОБЪЕДИНЕНИЕ ИДЕНТИФИКАЦИЙ ВОДИТЕЛЯ | 2015 |
|
RU2692300C2 |
| СИТУАТИВНЫЙ ИНТЕРФЕЙС ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2685998C2 |
| АВТОМОБИЛЬНАЯ СИСТЕМА РЕКОМЕНДАЦИЙ ДЛЯ ВОДИТЕЛЯ | 2012 |
|
RU2599593C2 |
| УЛУЧШЕННАЯ ДОСТАВКА СООБЩЕНИЙ | 2015 |
|
RU2739913C2 |
| ТЕЛЕМАТИЧЕСКАЯ СИСТЕМА ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2002 |
|
RU2207262C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО, СПОСОБ ОЦЕНИВАНИЯ ВОДИТЕЛЯ И СЕРВЕР ХАРАКТЕРИСТИК ВОДИТЕЛЯ | 2016 |
|
RU2686387C2 |
Система управления питанием подсистем транспортного средства содержит устройство обработки, запрограммированное с возможностью определения состояния зажигания, определения скорости транспортного средства и питания по меньшей мере одной подсистемы транспортного средства, если состояние зажигания отключено, пока скорость транспортного средства выше заданного порогового значения. Предложены также способ управления питанием подсистем транспортного средства, система управления питанием подсистем транспортного средства. Достигается питание подсистемы транспортного средства, если состояние зажигания отключено и скорость транспортного средства выше заданного порогового значения, причем устройство обработки запрограммировано с возможностью отключения подсистемы транспортного средства, если скорость транспортного средства ниже заданного порогового значения. Достигается продолжение работы подсистемы транспортного средства в случае отказа системы зажигания или непреднамеренного выключения системы зажигания. 3 н. и 16 з.п. ф-лы, 5 ил.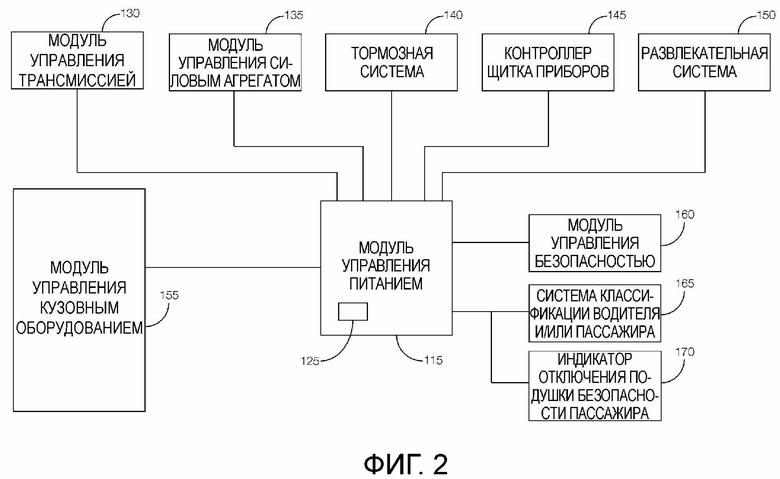
1. Система управления питанием подсистем транспортного средства, содержащая:
устройство обработки, запрограммированное с возможностью определения состояния зажигания, определения скорости транспортного средства и питания по меньшей мере одной подсистемы транспортного средства, если состояние зажигания отключено, пока скорость транспортного средства выше заданного порогового значения.
2. Система п. 1, в которой устройство обработки запрограммировано с возможностью отключения по меньшей мере одной подсистемы транспортного средства, если скорость транспортного средства ниже заданного порогового значения.
3. Система по п. 2, в которой отключение по меньшей мере одной подсистемы транспортного средства включает в себя отключение питания по меньшей мере одной подсистемы транспортного средства.
4. Система по п. 1, в которой устройство обработки запрограммировано с возможностью определения состояния ключа.
5. Система по п. 4, в которой устройство обработки запрограммировано с возможностью определения состояния зажигания независимо от состояния ключа.
6. Система по п. 4, в которой устройство обработки запрограммировано с возможностью питания по меньшей мере одной подсистемы транспортного средства по меньшей мере частично на основе состояния ключа.
7. Система по п. 4, в которой определение состояния ключа включает в себя определение по меньшей мере одного из предыдущего состояния ключа и текущего состояния ключа.
8. Система по п. 1, в которой устройство обработки запрограммировано с возможностью осуществления ситуационной коррекции.
9. Система по п. 8, в которой устройство обработки запрограммировано с возможностью осуществления ситуационной коррекции в ответ на ввод пользователя.
10. Система по п. 8, в которой ситуационная коррекция включает в себя по меньшей мере одну из коррекции буксировки, коррекции припаркованного транспортного средства, коррекции режима сборки и коррекции удаленного запуска.
11. Система по п. 10, в которой коррекция буксировки включает в себя первую коррекцию буксировки, где в транспортном средстве присутствует водитель и/или пассажир, и вторую коррекцию буксировки, где в транспортном средстве отсутствуют водитель и/или пассажиры.
12. Способ управления питанием подсистем транспортного средства, содержащий этапы, на которых:
определяют состояние зажигания транспортного средства;
определяют скорость транспортного средства;
сравнивают скорость транспортного средства с заданным пороговым значением; и
питают по меньшей мере одну подсистему транспортного средства, если состояние зажигания отключено, пока скорость транспортного средства выше заданного порогового значения.
13. Способ по п. 12, дополнительно содержащий этап, на котором отключают по меньшей мере одну подсистему транспортного средства, если скорость транспортного средства ниже заданного порогового значения.
14. Способ по п. 13, в котором отключение по меньшей мере одной подсистемы транспортного средства включает в себя этап, на котором отключают питание по меньшей мере одной подсистемы транспортного средства.
15. Способ по п. 12, дополнительно содержащий этап, на котором осуществляют ситуационную коррекцию.
16. Способ по п. 15, дополнительно содержащий этап, на котором принимают ввод пользователя, и причем ситуационную коррекцию осуществляют в ответ на прием ввода пользователя.
17. Способ по п. 16, в котором ситуационная коррекция включает в себя по меньшей мере одну из коррекции буксировки, коррекции припаркованного транспортного средства, коррекции режима сборки и коррекции удаленного запуска.
18. Способ по п. 17, в котором осуществление коррекции буксировки включает в себя этапы, на которых:
определяют, присутствует ли водитель и/или пассажир в транспортном средстве; и
осуществляют первую коррекцию буксировки, если в транспортном средстве присутствует водитель и/или пассажир, и вторую коррекцию буксировки, если в транспортном средстве отсутствуют водитель и/или пассажиры.
19. Система управления питанием подсистем транспортного средства, содержащая:
устройство обработки, запрограммированное с возможностью определения состояния зажигания, определения состояния ключа независимо от состояния зажигания, определения скорости транспортного средства и питания по меньшей мере одной подсистемы транспортного средства по меньшей мере частично на основе состояния зажигания и состояния ключа, пока скорость транспортного средства выше заданного порогового значения, причем устройство обработки дополнительно запрограммировано с возможностью отключения по меньшей мере одной подсистемы транспортного средства, когда скорость транспортного средства ниже заданного порогового значения,
причем устройство обработки запрограммировано с возможностью осуществления ситуационной коррекции в ответ на ввод пользователя.
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |

