Изобретение относится к области машиностроения, в частности к способам и устройствам для определения пространственного положения осей отверстий на поверхности измеряемого объекта, в заданной системе координат, с помощью координатно-измерительной системы на базе лазерного трекера, и преимущественно может быть использовано для контроля криволинейных и прямолинейных авиационных панелей, с большим количеством разных по диаметру отверстий, расположенных как в прямой видимости лазерного трекера, так и в ее затененных, труднодоступных и стесненных местах.
Известен «Способ определения радиуса отверстия» (Патент РФ №2005990; МПК G01B 5/08; опубл. 15.01.1994), по которому в определенном сечении контролируемого отверстия устанавливают линейку прямоугольной формы таким образом, что ее плоскость совпадает с плоскостью выверяемого сечения отверстия и касается поверхности двумя крайними ребрами. Дополнительной линейкой измеряют расстояние, совпадающее с направлением верхнего края линейки и заключенное между торцом линейки и поверхностью сечения контролируемого отверстия, затем вычисляют радиус контролируемого отверстия по формуле.
Недостатком выше приведенного технического решения является то, что результат измерений является недостаточно точным и зависит от влияния субъективных факторов, а использование в качестве средства измерения стальной линейки увеличивает погрешность и уменьшает достоверность измерений. Данный способ подходит только для контроля отверстий больших диаметров с широкими допусками и невысокой точностью, а невозможность измерений отверстий малых диаметров и координат их центров, сужает диапазон измерений и приводит к снижению технологических возможностей этого способа.
Известен «Способ определения координат центра отверстия и устройство для его реализации» (Патент РФ №2667666; МПК G01B 11/03, G01B 11/12; опубл. 24.09.2018), по которому определяют координаты центра сферического отражателя лазерного измерителя не менее чем по трем точкам дуги окружности, по которым вычисляют координаты центра дуги окружности и определяют координаты центра сферического отражателя в заданной системе координат, а в качестве измерителя используют лазерный трекер координатно-измерительной системы, луч которого направляют в центр сферического отражателя, причем последний устанавливают и фиксируют в плоскости основания измеряемого отверстия.
Известно устройство, реализующее способ определения координат центра отверстия (Патент РФ №2667666; МПК G01B 11/03, G01B 11/12; опубл. 24.09.2018), состоящее из кронштейна с полками, на одной из которых по нормали к ее плоскости, расположена бобышка в виде цилиндрического пальца, вставленная в измеряемое отверстие с возможностью поворота относительно его оси, а на другой - отверстие под хвостовик магнитной подставки, при этом полки выполнены параллельными и на другой из двух параллельных полок, соединенных между собой третьей полкой расположено, по меньшей мере, одно отверстие, в котором установлен сферический отражатель на магнитной подставке в плоскости основания измеряемого отверстия и зафиксирован с возможностью произвольного поворота на углы с перемещением, относительно центра измеряемого отверстия, соответствующим максимально разнесенным между собой точкам по дуге окружности, причем плоскость, на которой расположена бобышка совмещена с плоскостью основания измеряемого отверстия.
Недостатком указанного технического решения является повышенная трудоемкость выполнения процесса определения положения осей отверстий, связанная с позиционированием элементов участвующих в этом процессе - бобышки и кронштейна с полками, в особенности при определении положения осей отверстий малого диаметра (до 5 мм) и в большом количестве на одной поверхности (панели авиационной техники), что ведет к снижению производительности. Также данный способ и устройство применимы для определения положения осей отверстий, выполненных на прямолинейных поверхностях изделий и не применимы для криволинейных поверхностей, что в целом приводит к снижению функциональных возможностей устройства и технологических возможностей способа.
Наиболее близким по технической сущности к заявленному способу и устройству, взятому в качестве прототипа является «Способ извлечения характеристических данных отверстия под болт на основе трехмерного лазерного сканера» (Патент CN 106247938 (А); МПК G01B 11/00, G01B 11/06, G01B 11/08; дата приоритета 31.08.2016, опубл. 21.12.2016), по которому извлекают характеристические данные отверстия под болт, а именно конструктивно положение оси отверстия и величину его радиуса на основе трехмерного лазерного сканера, реализующие данный способ для измерения характеристических данных отверстия под болт применяют на стальной конструкции. Для измерения данных радиуса и высоты измеряемого отверстия под болт, сферическую цель (калиброванный шар) фиксируют в измеряемом отверстии так, чтобы один конец отверстия контактировал с калиброванным шаром, при этом трехмерный лазерный сканер используют для выполнения панорамного сканирования измеряемого отверстия под болт и калиброванного шара, в результате чего, получают данные в виде облака точек после чего это облако точек обрабатывают для получения трехмерной координаты центральной точки калиброванного шара, а трехмерная координата центральной точки отверстия под болт может быть получена посредством вычисления согласно трехмерной координате центральной точки калиброванного шара.
после чего это облако точек обрабатывают для получения трехмерной координаты центральной точки калиброванного шара, а трехмерная координата центральной точки отверстия под болт может быть получена посредством вычисления согласно трехмерной координате центральной точки калиброванного шара.
К недостатку данного технического решения необходимо отнести наличие дополнительных операций базирования и крепления сферической цели (калиброванного шара) для панорамного сканирования, что существенно увеличивает время измерений при определении характеристик отверстия в случаях с измерением большого количества разных по диаметру отверстий, расположенных на поверхностях измеряемого объекта, а также невозможность реализации процесса определения взаимного положения осей отверстий, все это снижает точность измерений и производительность, а в целом ведет к снижению технологических возможностей способа и функциональных возможностей устройства.
Решаемой задачей предполагаемого изобретения является создание эффективного, то есть технологичного способа определения положения осей отверстий на поверхности измеряемого объекта, и их взаимное положение, в заданной системе координат, благодаря расширению функциональных возможностей устройства для повышения точности и производительности определения их параметров.
Техническим результатом изобретения является расширение технологических возможностей способа определения положения осей отверстий на поверхности измеряемого объекта, и их взаимное положение, в заданной системе координат, путем повышения точности и производительности определения их параметров за счет расширения функциональных возможностей устройства.
Технический результат достигается тем, что в Способе определения положения осей отверстий на поверхности измеряемого объекта, заключающемся в определении положения оси отверстия измеряемого объекта с помощью лазерного измерителя и получении облака точек, описывающего сегмент полусферы, согласно которому, вводят электронную модель измеряемого объекта и сферический отражатель, получая от его вращения облако точек, а в качестве измерителя используют лазерный трекер координатно-измерительной системы, и выполняют определение координат баз на измеряемом объекте, которые совмещают с базами в электронной модели измеряемого объекта и перемещают к последней с помощью программного обеспечения координатно-измерительной системы, причем сегмент полусферы получают вращением центра сферического отражателя вокруг точки на оси измеряемого отверстия, при этом определение координат центра сферического отражателя выполняют в заданной системе координат, что позволяет контролировать положение осей отверстий на поверхности измеряемого объекта и их взаимное положение, после чего определяют номинальное значение расстояния от соответствующих точек на поверхности полусферы до точки на оси отверстия, спроецированной по кратчайшему расстоянию на поверхность измеряемого объекта, при котором после соединения точки на поверхности полусферы и спроецированной точки на поверхность измеряемого объекта получают нормаль к этой поверхности в последней точке и, соответственно, положение оси отверстия на поверхности измеряемого объекта, затем вычисляют диаметр измеряемого отверстия по формуле:

где:
r - радиус калиброванного шара;
L ном - номинальное расстояние;
h стержня - длина стержня.
Технический результат достигается тем, что в Устройстве для определения положения осей отверстий на поверхности измеряемого объекта, состоящем из калиброванного шара, лазерного измерителя, согласно которому, в качестве лазерного измерителя использован лазерный трекер, при этом введен стержень с коническим захватом, в его нижней части, и магнитная подставка со сферическим отражателем, которая установлена и зафиксирована в верхней части стержня, а конический захват стержня зафиксирован относительно калиброванного шара, установленного в измеряемое отверстие, с возможностью вращения стержня с магнитной подставкой и сферическим отражателем, относительно центра калиброванного шара, причем центр вращения поверхности полусферы, описанной центром сферического отражателя является центром калиброванного шара.
Новизна:
Заявляемое техническое решение позволяет создать высокотехнологичный «Способ определения положения осей отверстий на поверхности измеряемого объекта» благодаря вводу электронной модели измеряемого объекта, сферического отражателя и выполнению определения координат баз на измеряемом объекте, которые совмещают с базами в электронной модели и перемещают к ней с помощью программного обеспечения координатно-измерительной системы, при этом в качестве измерителя используют лазерный трекер. Далее применяя операции вращения центра сферического отражателя, установленного на магнитной подставке в стержне, который имеет номинальную длину исходя из конструктивных особенностей, получают облако точек, описывающего сегмент полусферы центром сферического отражателя, в результате чего, вращение сферического отражателя производят вокруг центра калиброванного шара с постоянным радиусом, а с помощью программного обеспечения координатно-измерительной системы определяют положение осей отверстий на поверхности измеряемого объекта и их взаимное положение, вследствие известных двух постоянных величин: длине стержня и радиусу калиброванного шара, с применением математических вычислений по формуле и определяют диаметр измеряемого отверстия.
Для пояснения технической сущности рассмотрим чертежи, где:
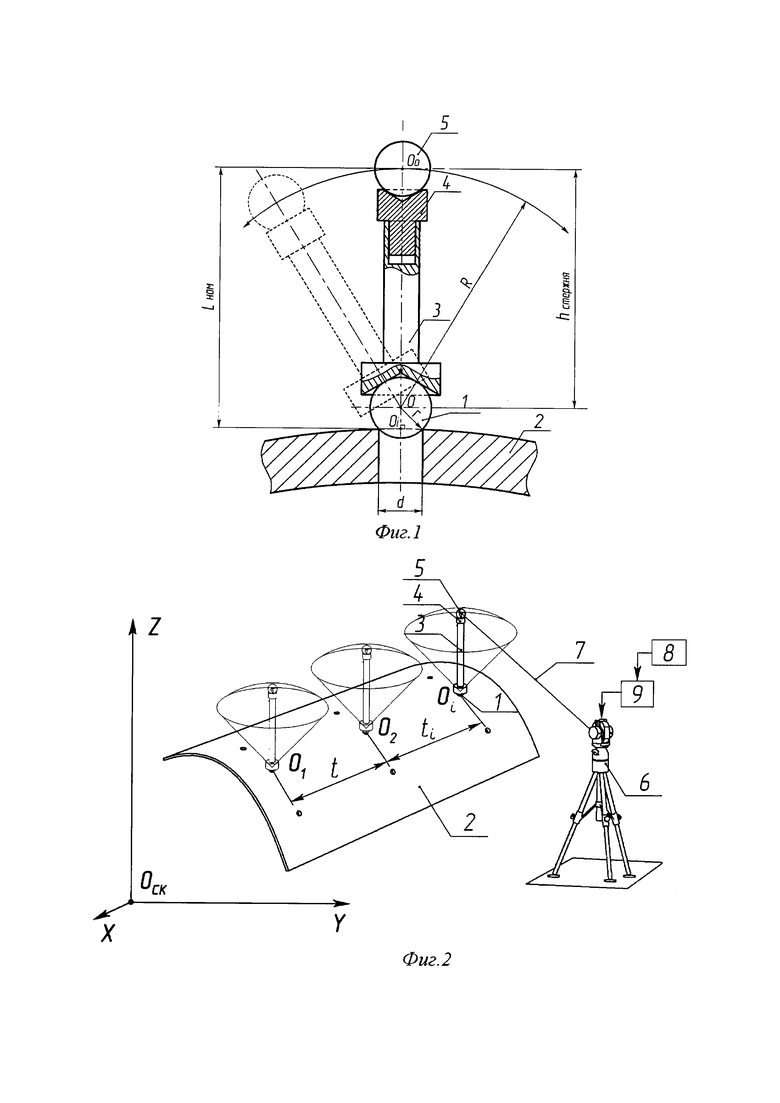
на фиг. 1 показано устройство для определения положения осей отверстий измеряемого объекта;
на фиг. 2 показано в изометрии устройство для определения положения осей отверстий измеряемого объекта с лазерным трекером,
где:
1 - калиброванный шар;
2 - измеряемый объект;
3 - стержень с коническим захватом;
4 - магнитная подставка;
5 - сферический отражатель;
6 - лазерный трекер;
7 - лазерный луч;
8 - электронная модель измеряемого объекта;
9 - программное обеспечение координатно-измерительной системы трекера;
R - радиус сегмента полусферы, которую описывает сферический отражатель при вращении устройства;
r - радиус калиброванного шара;
d - диаметр измеряемого отверстия;
Lном - номинальное расстояние;
hстержня - длина стержня;
О - центр калиброванного шара;
Oo - точка на поверхности сегмента полусферы;
Oi - точка пересечения оси измеряемого отверстия с поверхностью измеряемого объекта;
t и ti - шаг между измеряемыми отверстиями.
Способ осуществляют следующим образом:
Определение положения оси отверстия измеряемого объекта 2 выполняют с помощью лазерного измерителя с получениием облака точек, описывающего сегмент полусферы, при этом вводят электронную модель 8 измеряемого объекта и сферический отражатель 5, получая от его вращения облако точек, в качестве измерителя используют лазерный трекер 6 координатно-измерительной системы, позиционируя его возле измеряемого объекта 2 с отверстиями и направляя излучаемый им лазерный луч 7 в центр сферического отражателя 5. Лазерный луч 7, отражаясь от сферического отражателя 5, возвращается обратно в объектив лазерного трекера 6, после чего с учетом двух углов и расстояния между ними вычисляются координатно-измерительной системой лазерного трекера 6, с высокой точностью, текущие пространственные координаты (X; Y; Z) центра сферического отражателя 5. С помощью вышеописанных действий выполняют определение координат баз на измеряемом объекте 2, которые совмещают с базами в электронной модели 8 измеряемого объекта и перемещают к последней с помощью программного обеспечения координатно-измерительной системы 9, причем сегмент полусферы радиусом R получают вращением центра сферического отражателя 5, при этом определение координат центра сферического отражателя 5 выполняют в заданной системе координат, что позволяет контролировать положение осей отверстий на поверхности измеряемого объекта 2 и их взаимное положение, например шаг между измеряемыми отверстиями (t и ti). После чего, определяют номинальное значение расстояния Lном от соответствующих точек на поверхности полусферы радиусом R до точки на оси отверстия, спроецированной по кратчайшему расстоянию на поверхность измеряемого объекта, при котором после соединения точки Oo на поверхности полусферы и спроецированной точки Oi на поверхность измеряемого объекта 2 получают нормаль к этой поверхности в последней точке и, соответственно, положение оси отверстия на поверхности измеряемого объекта 2. Поверхность измеряемого объекта 2 может быть, как криволинейна, так и прямолинейна, что приводит к расширению функциональных и технологи чески x возможностей способа и устройства. Для определения положения оси измеряемого отверстия диаметром d на поверхности измеряемого объекта 2, введен стержень 3 с коническим захватом в его нижней части, и магнитная подставка 4 со сферическим отражателем 5, которая установлена и зафиксирована в верхней части стержня 3, а конический захват стержня 3 зафиксирован относительно калиброванного шара 1, который устанавливают в измеряемое отверстие диаметром d, с возможностью вращения стержня 3 с магнитной подставкой 4 и сферическим отражателем 5, относительно центра О калиброванного шара 1, причем центр вращения сферического отражателя 5 описывает поверхность полусферы радиусом R, при этом центр вращения сферического отражателя 5, является центром О калиброванного шара 1. Такое техническое решение без дополнительных операций крепления и позиционирования конструктивных элементов устройства приводит к повышению точности и снижению трудоемкости выполнения процесса измерения, то есть к повышению производительности. Затем вычисляют диаметр измеряемого отверстия, благодаря двум постоянным величинам длине стержня и радиусу калиброванного шара, по формуле:
r - радиус калиброванного шара;
Lном - номинальное расстояние;
hстержня - длина стержня.
По своим технико-экономическим преимуществам заявляемое техническое решение, по сравнению с известными аналогами, позволяет получить высокотехнологичный способ определения положения осей отверстий на поверхности измеряемого объекта, и их взаимное положение, заключающийся в возможности определения большого количества разных по диаметру отверстий, с определением пространственного положения их осей и значений диаметров, выполненных как на прямолинейных, так и криволинейных поверхностях измеряемого объекта в пространстве, в заданной системе координат, путем повышения точности и производительности определения их параметров за счет расширения функциональных возможностей устройства, а именно благодаря вращению сферического отражателя, установленного на магнитной подставке и зафиксированной в верхней части стержня, конический захват которого зафиксирован относительно калиброванного шара, установленного в измеряемое отверстие и определению номинального расстояния от точки на поверхности полусферы до точки на оси отверстия, спроецированной по кратчайшему расстоянию на поверхность измеряемого объекта с получением нормали к этой поверхности в последней точке и, соответственно, положения оси отверстия на поверхности измеряемого объекта, с последующим вычислением диаметра измеряемого отверстия, что позволяет расширить функциональные и технологические возможности, а в целом приводит к повышению эффективности и высокотехнологичности предполагаемого технического решения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ЦЕНТРА ОТВЕРСТИЯ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2017 |
|
RU2667666C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ ОСИ ОТВЕРСТИЯ ПРИ МОНТАЖЕ ШАРНИРНЫХ КРОНШТЕЙНОВ, С ПОМОЩЬЮ ЛАЗЕРНОГО ТРЕКЕРА | 2019 |
|
RU2725874C1 |
| ПОЗИЦИОНИРУЮЩЕЕ УСТРОЙСТВО ДЛЯ СБОРОЧНОЙ ОСНАСТКИ | 2018 |
|
RU2684876C1 |
| Способ контроля положения оси прокатки непрерывного стана | 2015 |
|
RU2607887C1 |
| Способ калибровки мобильных 3D-координатных средств измерений и устройство для его реализации | 2018 |
|
RU2710900C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ СКРЫТЫХ КОНТРОЛЬНЫХ ТОЧЕК ПРИ ИЗМЕРЕНИИ ОТКЛОНЕНИЙ ОТ КРУГОВОЙ ФОРМЫ СЕЧЕНИЙ КОРПУСОВ ЦИЛИНДРИЧЕСКИХ ВСТАВОК СУДОВ ИЛИ ПОДВОДНЫХ ЛОДОК | 2014 |
|
RU2575593C2 |
| Способ калибровки лазерного сканера, предназначенного для оценки качества поверхности сварного шва | 2023 |
|
RU2821171C1 |
| ПОВЕРОЧНЫЙ КОМПЛЕКС КООРДИНАТНЫХ ПРИБОРОВ И ИЗМЕРИТЕЛЬНЫХ СИСТЕМ | 2012 |
|
RU2494346C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ИЗДЕЛИЙ И ЦЕЛЕВОЙ ЗНАК ДЛЯ ОПРЕДЕЛЕНИЯ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ИЗДЕЛИЙ | 2000 |
|
RU2202101C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ГЕОМЕТРИИ ПОВЕРХНОСТИ СО СЛОЖНОЙ ФОРМОЙ (варианты) | 2022 |
|
RU2788828C1 |
Изобретение относится к способу и устройству для определения пространственного положения осей отверстий на поверхности измеряемого объекта в заданной системе координат с помощью координатно-измерительной системы, и может быть использовано для контроля криволинейных и прямолинейных авиационных панелей с большим количеством разных по диаметру отверстий, расположенных как в прямой видимости лазерного трекера, так и в ее затененных и труднодоступных местах. Техническим результатом является повышение точности и производительности определения положения осей отверстий. Устройство состоит из калиброванного шара 1, лазерного измерителя, такого как лазерный трекер 6, при этом введен стержень 3 с коническим захватом в его нижней части и магнитная подставка 4 со сферическим отражателем 5, которая установлена и зафиксирована в верхней части стержня 3, а конический захват стержня 3 зафиксирован относительно калиброванного шара 1, установленного в измеряемое отверстие диаметра d, с возможностью вращения стержня 3 с магнитной подставкой 4 и сферическим отражателем 5 относительно центра О калиброванного шара 1, причем центр вращения поверхности полусферы радиусом R, описанной центром сферического отражателя 5, является центром О калиброванного шара 1. 2 н.п. ф-лы, 2 ил.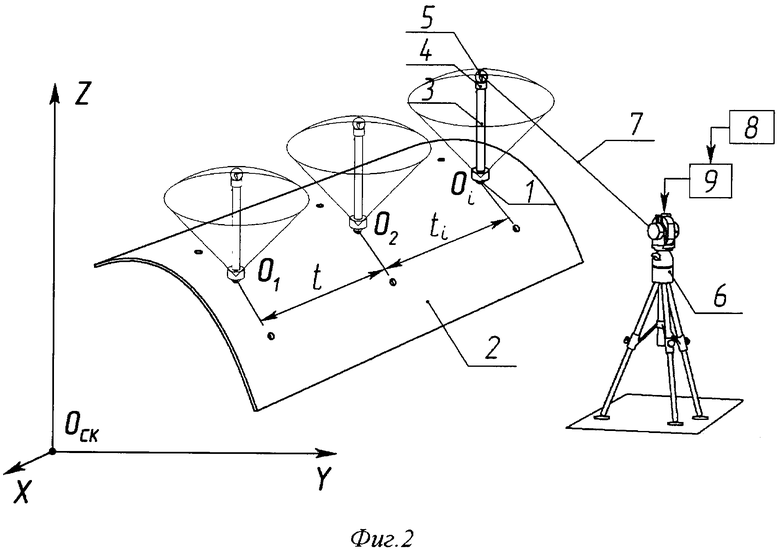
1. Способ определения положения осей отверстий на поверхности измеряемого объекта, заключающийся в определении положения оси отверстия измеряемого объекта с помощью лазерного измерителя и получении облака точек, описывающего сегмент полусферы, отличающийся тем, что вводят электронную модель измеряемого объекта и сферический отражатель, получая от его вращения облако точек, а в качестве измерителя используют лазерный трекер координатно-измерительной системы и выполняют определение координат баз на измеряемом объекте, которые совмещают с базами в электронной модели измеряемого объекта и перемещают к последней с помощью программного обеспечения координатно-измерительной системы, причем сегмент полусферы получают вращением центра сферического отражателя вокруг точки на оси измеряемого отверстия, при этом определение координат центра сферического отражателя выполняют в заданной системе координат, что позволяет контролировать положение осей отверстий на поверхности измеряемого объекта и их взаимное положение, после чего определяют номинальное значение расстояния от соответствующих точек на поверхности полусферы до точки на оси отверстия, спроецированной по кратчайшему расстоянию на поверхность измеряемого объекта, при котором после соединения точки на поверхности полусферы и спроецированной точки на поверхность измеряемого объекта получают нормаль к этой поверхности в последней точке и соответственно положение оси отверстия на поверхности измеряемого объекта, затем вычисляют диаметр измеряемого отверстия по формуле:

где r - радиус калиброванного шара;
L ном - номинальное расстояние;
h стержня - длина стержня.
2. Устройство для определения положения осей отверстий на поверхности измеряемого объекта, состоящее из калиброванного шара, лазерного измерителя, отличающееся тем, что в качестве лазерного измерителя использован лазерный трекер, при этом введен стержень с коническим захватом в его нижней части и магнитная подставка со сферическим отражателем, которая установлена и зафиксирована в верхней части стержня, а конический захват стержня зафиксирован относительно калиброванного шара, установленного в измеряемое отверстие, с возможностью вращения стержня с магнитной подставкой и сферическим отражателем относительно центра калиброванного шара, причем центр вращения поверхности полусферы, описанной центром сферического отражателя, является центром калиброванного шара.
| БЕСКОНТАКТНОЕ УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ РАССТОЯНИЯ ДО РАЗЛИЧНЫХ ТОЧЕК ПОВЕРХНОСТИ ОБЪЕКТА | 2008 |
|
RU2383858C2 |
| ПОЗИЦИОНИРУЮЩЕЕ УСТРОЙСТВО ДЛЯ СБОРОЧНОЙ ОСНАСТКИ | 2018 |
|
RU2684876C1 |
| US 9897442 B2, 20.02.2018 | |||
| KR 20040048099 A, 07.06.2004 | |||
| US 7372581 B2, 13.05.2008 | |||
| US 20140176935 A1, 26.06.2014. | |||

