Область техники, к которой относится изобретение
Изобретение относится к способам мониторинга устройства типа электромеханического привода.
Уровень техники
Функции мониторинга рабочего состояния (health monitoring) (при этом говорят также, хотя и не так часто, об обычном обслуживании, о профилактическом обслуживании и о планово-предупредительном техническом обслуживании) применяют с целью предупреждения повреждения устройства или системы, в частности, в области авиации.
Таким образом, функции мониторинга рабочего состояния позволяют избегать поломок, оптимизировать срок службы, предусматривать заранее и планировать операции обслуживания (и возможного демонтажа) и, следовательно, сократить расходы на операции обслуживания устройства или системы.
Классически применение функции мониторинга рабочего состояния включает в себя фазу считывания данных, фазу предварительной обработки данных, фазу выделения сигнатур, фазу диагностики и фазу прогнозирования.
Фаза считывания данных состоит в сборе данных измерения, выдаваемых датчиками, измеряющими параметры, характеризующие работу устройства или системы.
Сбор данных производят, например, во время испытаний или путем дистанционной загрузки на устройстве или на системе, когда она находится в рабочем состоянии.
Фаза предварительной обработки данных состоит, в частности, в фильтрации данных, чтобы устранить шум измерения, присутствующий в данных.
Фаза выделения сигнатур состоит в обработке данных с целью выделения из них сигнатур, характеризующих состояние устройства или системы и, возможно, нарушение работы устройства или системы. Такое нарушение может быть результатом наличия одной или нескольких неисправностей устройства или системы. Следовательно, сигнатуры свидетельствуют о неисправности или неисправностях.
Фаза диагностики состоит, в частности, в оценке сигнатур, чтобы оценить состояние устройства или системы и чтобы, в случае неисправности, локализовать указанную неисправность и оценить степень ее серьезности.
Фаза прогнозирования состоит в оценке оставшегося срока службы устройства или системы.
Раскрытие сущности изобретения
Задача изобретения состоит в улучшении чувствительности сигнатур к неисправностям устройства или системы и, следовательно, улучшении обнаружения и оценки степени серьезности упомянутых неисправностей.
Для решения этой задачи предложен способ мониторинга устройства типа электромеханического привода, содержащего трехфазный электрический двигатель, при этом способ мониторинга содержит этапы, на которых:
- измеряют трехфазные токи, которые питают трехфазный электрический двигатель;
- проецируют измерения трехфазных токов в системе координат Парка для получения тока по квадратурной оси;
- применяют к току по квадратурной оси метод множественной эмпирической модовой декомпозиции, связанный с методом слепого разделения источника, для получения источниковых составляющих;
- автоматически выбирают среди источниковых составляющих первый набор источниковых составляющих, чувствительных к первой неисправности, и второй набор источниковых составляющих, чувствительных к второй неисправности, используя критерий выбора, при этом первая неисправность и вторая неисправность являются неисправностями, которые способны нарушить работу устройства;
- формируют первый виртуальный сигнал неисправности на основании первого набора источниковых составляющих и второй виртуальный сигнал неисправности на основании второго набора источниковых составляющих;
- выделяют из первого виртуального сигнала неисправности первый набор сигнатур, характеризующих первую неисправность, и из второго виртуального сигнала неисправности выделяют второй набор сигнатур, характеризующих вторую неисправность.
Заявленный способ мониторинга позволяет улучшить чувствительность сигнатур первого набора сигнатур к первой неисправности и сигнатур второго набора сигнатур ко второй неисправности и улучшить обнаружение первой неисправности и второй неисправности. Если дополнительно вычисляют степень серьезности первой неисправности и степень серьезности второй неисправности, заявленный способ мониторинга позволяет также улучшить оценку этих степеней серьезности.
Изобретение будет более понятно из нижеследующего описания частного неограничивающего варианта осуществления изобретения.
Краткое описание чертежей
Этот вариант описан со ссылками на прилагаемые чертежи, на которых:
на фиг. 1-4 представлены последовательные этапы заявленного способа мониторинга;
на фиг. 5 представлен этап применения метода слепого разделения источника в рамках заявленного способа мониторинга;
на фиг. 6 показан этап вычисления степени серьезности в рамках заявленного способа мониторинга.
Осуществление изобретения
В данном случае заявленный способ мониторинга применяют для линейного электромеханического привода управления полетом летательного аппарата.
В данном случае линейный электромеханический привод содержит электрический двигатель типа трехфазного синхронного двигателя с постоянными магнитами, механическую трансмиссию, которая может иметь прямое или опосредованное сцепление, электронный силовой модуль, который может быть вынесенным или не вынесенным, электронный модуль управления, который может быть вынесенным или не вынесенным, и набор датчиков. В данном случае набор датчиков включает в себя датчики тока, температурный датчик, датчик усилия и датчик положения. Датчик положения измеряет угловое положение ротора электрического двигателя.
Заявленный способ мониторинга позволяет реализовать функцию мониторинга рабочего состояния на линейном электромеханическом приводе.
Как было указано выше, функция мониторинга рабочего состояния включает в себя фазу считывания данных, фазу предварительной обработки данных, фазу выделения сигнатур, фазу диагностики и фазу прогнозирования.
Заявленный способ мониторинга содержит восемь последовательных этапов, осуществляемых в ходе фазы предварительной обработки данных и фазы выделения сигнатур.
Например, заявленный способ мониторинга предназначен для улучшения обнаружения и оценки двух неисправностей, которые могут привести к нарушению работы линейного электромеханического привода: первой неисправности defA в виде короткого замыкания статора электрического двигателя, и второй неисправности defB в виде заклинивания механической трансмиссии.
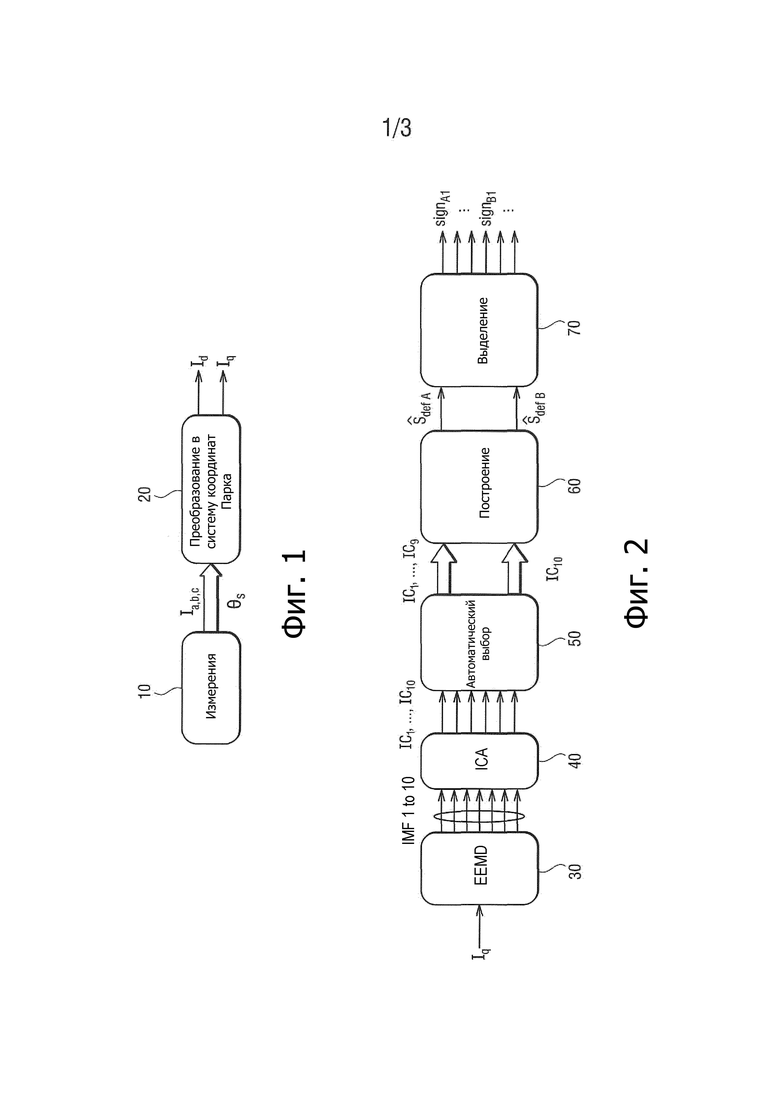
Как показано на фиг. 1-4, заявленный способ мониторинга прежде всего содержит этап 10 измерения, на котором производят синхронные измерения трехфазных токов Ia,b,c (где a, b и с являются фазами электрического двигателя), которые питают электрический двигатель, и углового положения θS ротора электрического двигателя.
Затем заявленный способ мониторинга содержит этап 20 проецирования в системе координат Парка (система координат связана с ротором, и ее ось d является синфазной с магнитным потоком возбуждения) измерений трехфазных токов, полученных в ходе этапа 10. Преобразование Парка осуществляют, применяя следующее уравнение:
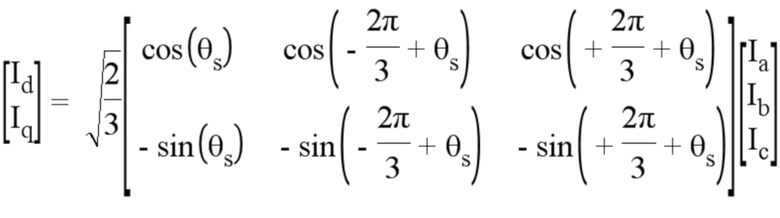
В этом уравнении Ia, Ib и Ic являются трехфазными токами, которые питают электрический двигатель, Id – «прямой» ток (т.е. ток по оси d) в системе координат Парка, Iq - квадратурный ток (т.е. ток по квадратурной оси q) в системе координат Парка, и θS - угловое положение вращающегося электрического поля статора электрического двигателя.
При этом:
θS = npp × механическое угловое положение ротора, где npp - число пар полюсов двигателя.
На фиг. 1 (и на других фигурах) узкая стрелка соответствует одноканальному сигналу, тогда как широкие стрелки соответствуют, каждая, многоканальному сигналу.
Далее заявленный способ мониторинга содержит этап 30 применения множественной эмпирической модовой декомпозиции (обычно обозначаемой EEMD от Ensemblist Empirical Mode Decomposition). Множественную эмпирическую модовую декомпозицию применяют для тока Iq по квадратурной
При осуществлении множественной эмпирической модовой декомпозиции 30 применяют эмпирическую модовую декомпозицию (обычно обозначаемую EMD).
Эмпирическая модовая декомпозиция предназначена для разложения сигнала на ряд колебательных составляющих, известных как внутренние колебания (IMFs) (от Intrinsic Mode Function).
Каждая колебательная составляющая IMF характеризует явления в частотном диапазоне.
Произвольный сигнал у разлагают при помощи эмпирического модального разложения следующим образом:
где IMFj - колебательные составляющие IMF.
Сигнал r является остаточным сигналом, из которого уже невозможно выделить колебательные составляющие IMF.
Ниже представлен пример алгоритма EMD, позволяющего получить колебательные составляющие IMF.
Rmax
Rmax
еверх
еверх
rj
IMFj
rj+1
Принимают IMFj = hj
Вычисляют rj+1 = rj - IMFj
среднее (еверх;енижн) = 0
При упоминании этого типа алгоритма говорят о «просеивании».
Первые выделяемые колебательные составляющие IМF являются колебательными составляющими IMF сигнала у на высокой частоте, а последние выделяемые колебательные составляющие IМF являются колебательными составляющими IMF сигнала у на низкой частоте.
Применение множественной эмпирической модовой декомпозиции 30 состоит в выполнении определенного числа раз эмпирической модовой декомпозиции на зашумленных вариантах сигнала, и затем в усреднении полученных колебательных составляющих IMF. При этом получают «истинные» колебательные составляющие IMF.
Таким образом, используют алгоритм EEMD, пример которого представлен ниже.
Применение множественной эмпирической модовой декомпозиции 30 позволяет избегать «смешивания мод», то есть наложения сигналов высокой частоты на сигнал низкой частоты, при данной колебательной составляющей IMF.
Затем заявленный способ мониторинга содержит этап применения метода слепого разделения источников (blind source separation (BSS)), который на основании наблюдений позволяет оценить совокупность неизвестных источников. Применяемый в данном случае метод слепого разделения источника является анализом 40 независимых составляющих (обычно обозначаемый ICA (от Independent Component Analysis). В анализе 40 независимых составляющих в качестве критерия разделения используют критерий статистической независимости.
Как будет показано ниже, источниками, о которых в данном случае идет речь, являются сигналы, характеризующие неисправности, возникающие на линейном электромеханическом приводе, то есть первую неисправность defA (короткое замыкание статора электрического двигателя) и вторую неисправность defВ (заклинивание механической трансмиссии).
Анализ 40 независимых составляющих применяют на истинных колебательных составляющих IMF (IMF 1-10 на фиг. 2, 4, 5), которые представляют собой «виртуальные» наблюдения, обеспечивающие входные данные для анализа 40 независимых составляющих.
Таким образом, анализ 40 независимых составляющих связывают с множественной эмпирической модовой декомпозицией 30.
Общим принципом анализа 40 независимых составляющих является оценка набора источников ŝ на основании набора наблюдений (х) с определением матрицы разделения W, при которой ŝ = Wx, и с минимизацией критерия разделения Ф (который в данном случае является критерием статистической независимости). В данном случае набор источников ŝ относится к вектору IC1, IC2, IC3…, ICn из независимых источниковых составляющих.
Связывание выражается следующим отношением:
 =
= 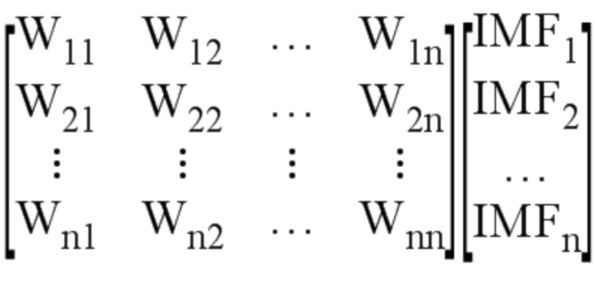 .
.
Преимуществом связывания множественной эмпирической модовой декомпозиции 30 и анализа 40 независимых составляющих является получение сигналов, намного более чувствительных к первой неисправности defA и ко второй неисправности defВ линейного электромеханического привода по сравнению со случаем, когда множественную эмпирическую модовую декомпозицию 30 и анализ 40 независимых составляющих осуществляют по одному и раздельно. При связывании получают сигналы, которые обычно являются в 10-20 раз более чувствительными к первой неисправности defA и ко второй неисправности defВ.
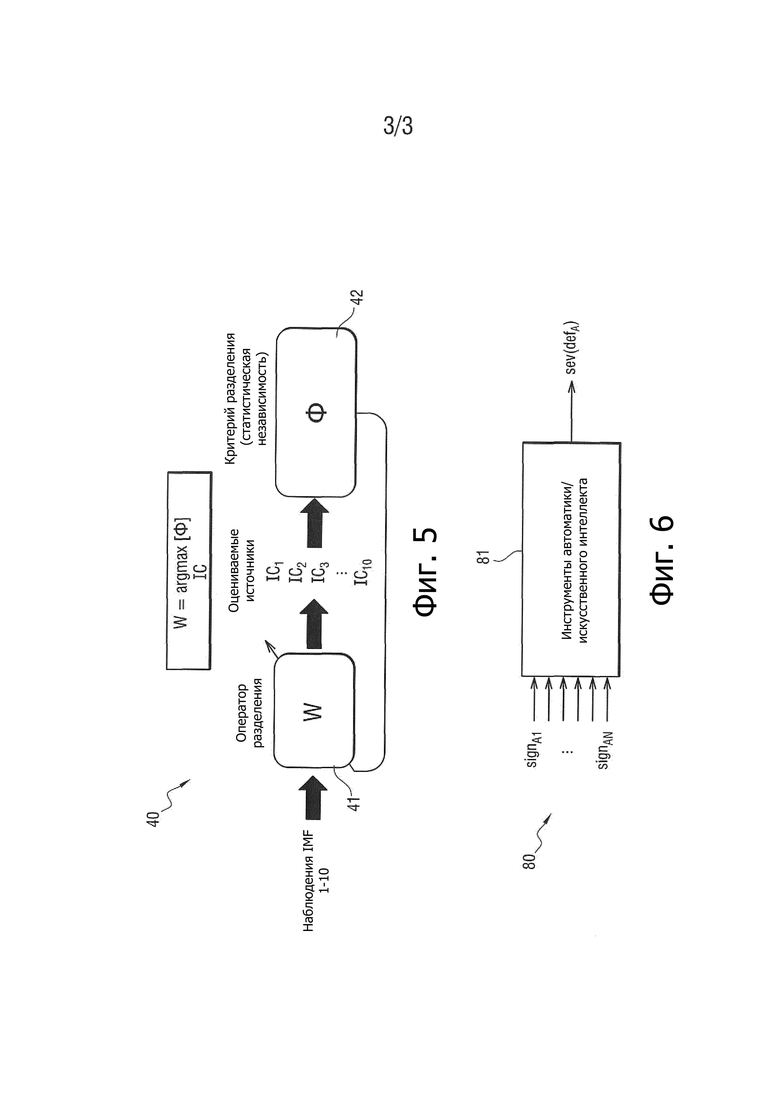
Как показано на фиг. 5, анализ 40 независимых составляющих осуществляют следующим образом.
Получают результаты виртуальных наблюдений, то есть истинные колебательные составляющие IMF (IMF 1-10).
Применяют алгоритм ICA.
Определяют матрицу разделения W (этап 41).
Матрица разделения W может состоять из скалярных коэффициентов Wij. При этом говорят о «мгновенном» случае. Матрица разделения W может также состоять из фильтров с конечной импульсной характеристикой (или FIR от Finite Impulse Response Filter). При этом говорят о «сверточном» случае. При сверточном случае порядок фильтров должен быть известен заранее и определен до применения анализа независимых составляющих.
Алгоритм ICA предназначен для решения следующей задачи:
W = argmaxIC[Ф]
Независимые источниковые составляющие IC1, IC2, IC3,…, IC10 оценивают при помощи итерационного процесса.
Критерий статистической независимости подвергают переоценке при каждой итерации и каждый раз повторно определяют матрицу разделения W.
Затем заявленный способ мониторинга содержит этап 50 автоматического выбора независимых составляющих IC1, IC2, IC3,…, IC10 источника (далее – источниковых составляющих).
Целью автоматического выбора 50 является выбор независимых источниковых составляющих IC1, IC2, IC3,…, IC10, чтобы различить независимые источниковые составляющие IC1, IC2, IC3,…, IC10, наиболее характерные для первой неисправности defA, и независимые источниковые составляющие IC1, IC2, IC3,…, IC10, наиболее характерные для второй неисправности defВ.
Выбор независимых источниковых составляющих IC1, IC2, IC3,…, IC10 осуществляют в соответствии с критерием выбора.
Критерий выбора может быть основан на различных статистических характеристиках: среднее значение, дисперсия, коэффициент асимметрии, максимум, минимум, среднеквадратическое значение, куртозис и т.д.
Критерий выбора выбирают в отношении рассматриваемых неисправностей, то есть в отношении первой неисправности defA и второй неисправности defВ.
В данном случае критерий выбора основан на вычислении куртозиса, который определяют как:
 , где:
, где:
- N - число точек на выборке;
-  - среднее значение на выборке;
- среднее значение на выборке;
- σ - дисперсия на выборке.
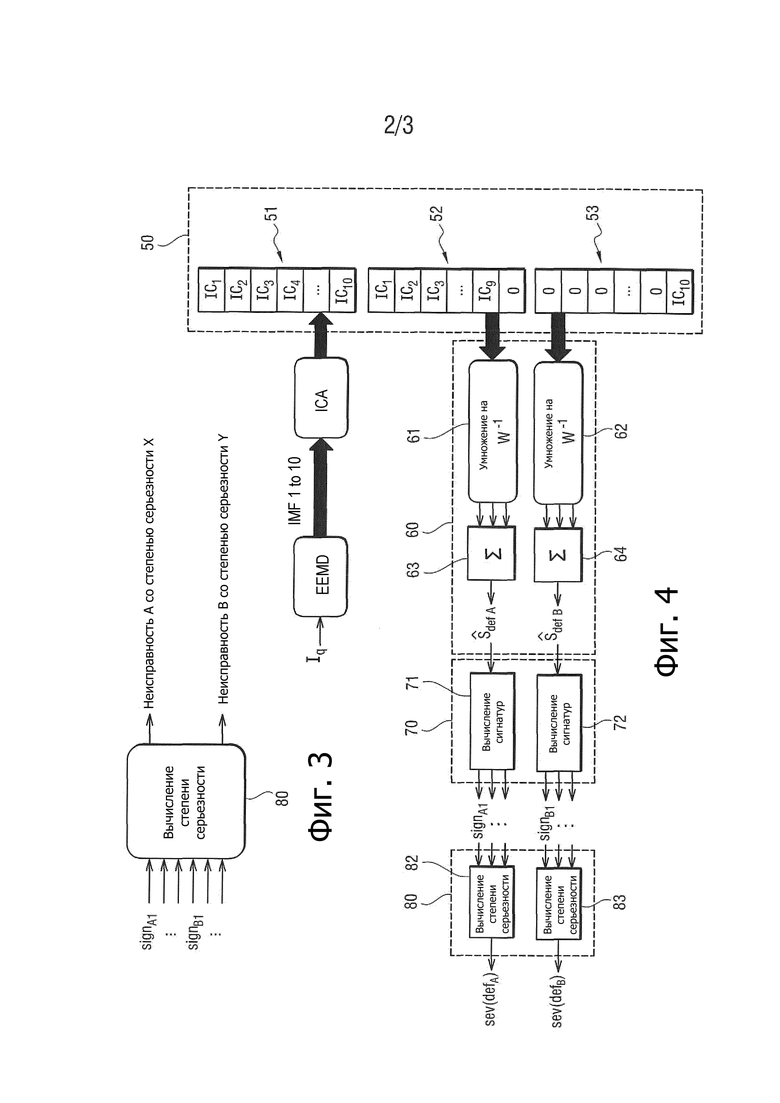
Как более подробно показано на фиг. 4, автоматический выбор 50 позволяет получить набор 51 источниковых составляющих, который включает в себя источниковые составляющие IC1, IC2, …, IC10.
После этого источниковые составляющие IC1, IC2, …, IC10 тестируют на показатель куртозиса, затем подвергают перегруппировке.
Таким образом, получают первый набор 52 источниковых составляющих с низким показателем куртозиса, который включает в себя источниковые составляющие IC1, IC2,…, IC9, и второй набор 53 источниковых составляющих с высоким показателем куртозиса, который включает в себя источниковую составляющую IC10.
После этого заявленный способ мониторинга содержит этап 60 формирования, который состоит в формировании виртуальных сигналов-источников ŝk, характеризующих неисправности k (следовательно, k обозначает первую неисправность defA или вторую неисправность defВ).
Получаем:
 ,
,
где  соответствуют выбору IC для неисправности k, то есть первому набору 52 источниковых составляющих (для первой неисправности defA, k = A) и второму набору 53 источниковых составляющих (для второй неисправности defВ, k = В).
соответствуют выбору IC для неисправности k, то есть первому набору 52 источниковых составляющих (для первой неисправности defA, k = A) и второму набору 53 источниковых составляющих (для второй неисправности defВ, k = В).
Таким образом, этап 60 формирования содержит умножение первого набора 52 на W-1 (этап 61) и умножение второго набора 53 на W-1 (этап 62).
Затем этап формирования 60 содержит суммирование (этап 63) составляющих, полученных путем умножения первого набора 52 на W-1, и суммирование (этап 64) составляющих, полученных путем умножения второго набора 53 на W-1.
Таким образом, получаем:
-  , который является первым виртуальным сигналом неисправности, имеющим максимальную чувствительность к первой неисправности defA;
, который является первым виртуальным сигналом неисправности, имеющим максимальную чувствительность к первой неисправности defA;
-  , который является вторым виртуальным сигналом неисправности, имеющим максимальную чувствительность ко второй неисправности defВ.
, который является вторым виртуальным сигналом неисправности, имеющим максимальную чувствительность ко второй неисправности defВ.
Затем заявленный способ мониторинга содержит этап 70 выделения сигнатур. Этап 70 выделения сигнатур состоит в выделении первой сигнатуры signA из первого виртуального сигнала неисправности и в выделении второй сигнатуры signВ из второго виртуального сигнала неисправности .
Выделение сигнатур можно производить в соответствии с первым типом методов и со вторым типом методов.
Первый тип методов состоит в вычислении «общих» статистических параметров на первом виртуальном сигнале неисправности и на втором виртуальном сигнале неисправности . Общими статистическими параметрами являются, например, среднее значение, максимум, куртозис, число переходов через ноль и т.д.
Второй тип методов состоит в определении комбинированных параметров, получаемых в результате комбинирования общих параметров.
В соответствии со вторым типом методов формируют следующую сигнатуру на основании второго виртуального сигнала неисправности (заклинивание):
Sign = NbPics*AmpCC, где:
- NbPics - число раз, когда второй виртуальный сигнал неисправности превышает заранее определенный порог на выборке; и
- AmpCC - максимальный размах амплитуды между двумя пиками второго виртуального сигнала неисправности .
Другими примерами сигнатур для первой неисправности defA являются:
- число переходов через ноль. Переходы через ноль подсчитываются, только если амплитуда сигнала превышает определенный порог ∈1;
- среднеквадратичное значение, вычисляемое по формуле:
 , где
, где
Т - длина сигнала и t - время;
- энергия, вычисляемая по формуле:
 .
.
Другими примерами сигнатур для второй неисправности defВ являются:
- среднеквадратичное значение, вычисляемое по формуле:
 , где
, где
Т - длина сигнала и t - время;
- энергия, вычисляемая по формуле:
 .
.
Наконец, заявленный способ мониторинга может содержать этап 80 вычисления степени серьезности неисправностей.
Вычисление степени серьезности можно производить при помощи нескольких способов.
Так, можно использовать метрику на сигнатуре, например, на первой сигнатуре signA:
 , где
, где
signA0 - значение первой сигнатуры для первой неисправности defA в начале ввода в эксплуатацию линейного электромеханического привода.
Как показано на фиг. 6, можно также применить метод 81 обработки, который основан на использовании инструментов искусственного интеллекта (например, метод с применением нейронных сетей, машин опорных векторов, Байесовских сетей).
Для получения степени серьезности sev(defA) применяют метод 81 обработки на нескольких сигнатурах signA0, … , signAN.
Это позволяет более точно и более надежно оценить степень серьезности.
Разумеется, изобретение не ограничивается описанным вариантом осуществления и охватывает любую версию, не выходящую за пределы объема изобретения, определенного формулой изобретения.
Хотя в данном случае изобретение применяют для линейного электромеханического привода, его можно, разумеется, применять для любого типа устройства.
Хотя в данном случае речь шла о неисправности в виде короткого замыкания статора трехфазного электрического двигателя и о неисправности в виде заклинивания механической трансмиссии, изобретение можно, разумеется, применять также для других неисправностей и для другого числа неисправностей.
Сигнатуры (и вычисление степени серьезности), используемые в данном случае для первой неисправности, можно применять для второй неисправности и наоборот.
Изобретение относится к способу мониторинга устройства типа электромеханического привода, содержащего трехфазный электрический двигатель. Способ мониторинга содержит этапы, на которых измеряют трехфазные токи, которые питают трехфазный электрический двигатель, проецируют измеренные трехфазные токи в системе координат Парка. Для тока по квадратурной оси (Iq) применяют метод (30) множественной эмпирической модовой декомпозиции, связанный с методом (40) слепого разделения источника, чтобы получить источниковые составляющие (IC1, IC10). Автоматически выбирают из источниковых составляющих первый набор источниковых составляющих (IC1, …, IC9), чувствительных к первой неисправности, и второй набор источниковых составляющих (IC9), чувствительных ко второй неисправности. Формируют (60) первый виртуальный сигнал неисправности и второй виртуальный сигнал неисправности. Из первого виртуального сигнала неисправности выделяют (70) первый набор сигнатур, характеризующих первую неисправность, и из второго виртуального сигнала неисправности выделяют второй набор сигнатур, характеризующих вторую неисправность. Технический результат: улучшение обнаружения и оценки степени серьезности неисправностей за счет улучшения чувствительности сигнатур к неисправностям. 11 з.п. ф-лы, 6 ил.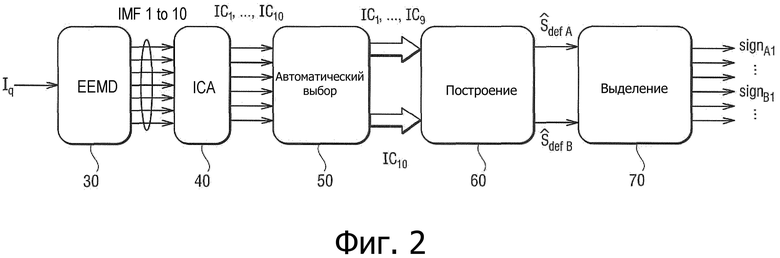
1. Способ мониторинга устройства типа электромеханического привода, содержащего трехфазный электрический двигатель, включающий этапы, на которых:
- измеряют трехфазные токи (Ia,b,c), питающие трехфазный электрический двигатель;
- проецируют трехфазные токи в системе координат Парка для получения тока по квадратурной оси (Iq);
- применяют для указанного тока по квадратурной оси метод (30) множественной эмпирической модовой декомпозиции, связанный с методом (40) слепого разделения источника, для получения источниковых составляющих (IC1, …, IC10);
- автоматически выбирают (50) среди источниковых составляющих первый набор (52) источниковых составляющих (IC1, …, IC9), чувствительных к первой неисправности, и второй набор (53) источниковых составляющих (IC10), чувствительных ко второй неисправности, используя критерий выбора, при этом первая неисправность и вторая неисправность являются неисправностями, способными нарушить работу устройства;
- формируют (60) первый виртуальный сигнал  неисправности на основании первого набора источниковых составляющих и второй виртуальный сигнал
неисправности на основании первого набора источниковых составляющих и второй виртуальный сигнал  неисправности на основании второго набора источниковых составляющих;
неисправности на основании второго набора источниковых составляющих;
- выделяют (70) из первого виртуального сигнала неисправности первый набор сигнатур, характеризующих первую неисправность, и выделяют из второго виртуального сигнала неисправности второй набор сигнатур, характеризующих вторую неисправность.
2. Способ мониторинга по п. 1, в котором метод слепого разделения источника содержит анализ независимых составляющих, в котором в качестве критерия разделения используют критерий статистической независимости.
3. Способ мониторинга по п. 1, в котором автоматический выбор осуществляют в соответствии с критерием выбора, выбираемым в отношении первой неисправности и второй неисправности и основанным на статистической характеристике первого набора источниковых составляющих и второго набора источниковых составляющих.
4. Способ мониторинга по п. 3, в котором статистической характеристикой является куртозис.
5. Способ мониторинга по п. 1, в котором первая сигнатура и/или вторая сигнатура signk являются такими, что signk = NbPics*AmpCC, где NbPics - число раз, когда соответствующий сигнал - первый виртуальный сигнал неисправности или второй виртуальный сигнал неисправности - превышает заранее определенный порог, и AmpCC - максимальный размах амплитуды между двумя пиками соответствующего сигнала - первого виртуального сигнала неисправности или второго виртуального сигнала неисправности.
6. Способ мониторинга по п. 1, в котором сигнатура из первого набора сигнатур или второго набора сигнатур представляет собой среднеквадратичное значение, вычисляемое по формуле
 ,
,
где  - соответствующий сигнал: первый виртуальный сигнал неисправности или второй виртуальный сигнал неисправности, Т - длительность сигнала и t - время.
- соответствующий сигнал: первый виртуальный сигнал неисправности или второй виртуальный сигнал неисправности, Т - длительность сигнала и t - время.
7. Способ мониторинга по п. 1, в котором сигнатура из первого набора сигнатур или второго набора сигнатур является энергией, вычисляемой по формуле
где - соответствующий сигнал: первый виртуальный сигнал неисправности или второй виртуальный сигнал неисправности, Т - длительность сигнала и t - время.
8. Способ мониторинга по п. 1, дополнительно содержащий этап вычисления степени серьезности sev(defA) первой неисправности и степени серьезности sev(defВ) второй неисправности.
9. Способ мониторинга по п. 8, в котором степень серьезности sev(defk) вычисляют на основании сигнатуры signk соответствующей неисправности - первой неисправности или второй неисправности - по формуле
 ,
,
где signk0 - значение сигнатуры соответствующей неисправности - первой неисправности или второй неисправности - в начале ввода устройства в эксплуатацию.
10. Способ мониторинга по п. 9, в котором степень серьезности вычисляют при помощи нейронной сети, или машины опорных векторов, или Байесовской сети.
11. Способ мониторинга по п. 1, в котором первая неисправность или вторая неисправность является коротким замыканием статора электрического двигателя.
12. Способ мониторинга по п. 1, в котором первая неисправность или вторая неисправность является заклиниванием механической трансмиссии.
| US 2015293177 A1, 15.10.2015 | |||
| СПОСОБ ДИАГНОСТИКИ ЭЛЕКТРОДВИГАТЕЛЯ ПЕРЕМЕННОГО ТОКА И СВЯЗАННЫХ С НИМ МЕХАНИЧЕСКИХ УСТРОЙСТВ | 2007 |
|
RU2339049C1 |
| US 2013013138 А1, 10.01.2013 | |||
| US 2010169030 A1, 01.07.2010 | |||
| US 2016282416 A1, 29.09.2016. | |||

