Изобретение относится к области диагностирования электродвигателей переменного тока и связанных с ними механических устройств, в том числе размещенных в труднодоступных местах, и выявления их неисправностей на ранних стадиях развития. В процессе эксплуатации электродвигателей с нагрузкой могут возникать повреждения отдельных элементов, что в свою очередь приводит к преждевременному выходу из строя. Необходимость заблаговременного выявления и мониторинга неисправностей труднодоступных ответственных электродвигателей и связанных с ними механических устройств, используемых, например, на предприятиях нефтегазового комплекса, атомных электростанциях и т.п., связана с обеспечением безопасной эксплуатации этих сложных систем в целом.
Известен способ определения технического состояния (диагностики) электродвигателя, при котором регистрируют и анализируют сигнал, порождаемый вибрацией электродвигателя, при этом регистрируют сигнал от переменной составляющей суммы фазных токов питания путем установки датчика напряжения одновременно на три фазы питающего кабеля, анализируют форму и амплитуду полученного сигнала и, сравнивая со значениями предыдущих измерений, оценивают возможность ее дальнейшей эксплуатации (RU №2213270, 2003).
Недостатками этого способа является то, что он не обеспечивает дистанционного диагностирования, низкая точность диагностики, а также сложность необходимых измерений и ограниченность видов диагностируемых неисправностей.
Известен также способ контроля работы (диагностики) электродвигателя переменного тока, включающий этапы разработки модели двигателя на компьютере, соединенном с двигателем с помощью множества датчиков, измерения множества рабочих сигналов двигателя с помощью датчиков, применения полученного в результате измерений множества рабочих сигналов для решения линейного уравнения состояния во времени, сравнения решения уравнения состояния с решением, предложенным моделью с вычислением остатка, определения на основании этапа сравнения, работает ли двигатель без обнаружения неисправности, коррелирования изменений с механической неисправностью в случае, если двигатель работает с обнаруженной неисправностью, и сообщения о существовании неисправности для предотвращения непредвиденного повреждения двигателя, и повторения этапов, отличающихся от разработки этапа моделирования, с выбранными интервалами во время работы двигателя, причем этап измерения множества рабочих сигналов содержит измерение тока на выходе двигателя, напряжения, подводимого к двигателю, и числа оборотов вала двигателя в течение выбранного интервала времени (RU №2155328, 2000).
Недостатками этого способа является то, что он реализуется с непосредственным доступом к электродвигателю при проведении диагностики, т.е. не обеспечивает дистанционного диагностирования, недостаточная точность, а также сложность необходимых измерений и ограниченность видов диагностируемых неисправностей.
Известен способ диагностики электродвигателя переменного тока и связанных с ним механических устройств, при котором в течение заданного интервала времени производят запись значений фазного тока, потребляемого электродвигателем, с помощью датчика тока с линейной амплитудно-частотной характеристикой, выделяют анализируемые характерные частоты с помощью фильтра низких частот, преобразуют полученный сигнал из аналоговой в цифровую форму, а затем производят спектральный анализ полученного сигнала, и сравнение значений амплитуд на характерных частотах с уровнем сигнала на частоте питающей сети (RU №2005110648, 2006, прототип).
Недостатками данного способа являются повышенная трудоемкость и сложность оценки результатов, поскольку любая модулируемая частота f учитывается в спектре дважды - по обе стороны питающего напряжения f1, т.е. в виде f1-f и в виде f1+f, чем обусловлена недостаточная точность диагностирования и отсутствие возможности увеличения числа анализируемых гармоник частоты f.
Технической задачей изобретения является создание эффективного и удобного способа диагностики, а также расширение арсенала способов диагностики электродвигателей переменного тока и связанных с ними механических устройств.
Технический результат состоит в повышении точности диагностирования, снижении трудоемкости, связанная с тем, что при совпадении линий в спектрах модуля вектора Парка тока и напряжения отсутствует необходимость проверки состояния спектра на каждой характерной частоте при каждой операции диагностики каждого электродвигателя, что сильно сокращает нагрузку на персонал, особенно при большом количестве электродвигателей на объекте, это обеспечивается в режиме дистанционного диагностирования (на расстоянии от электродвигателя - в электрощите питания и/или управления), упрощении процедуры диагностирования (не требует отключения электродвигателя и/или снятия нагрузки), при полной автоматизации процесса диагностики, расширении диагностических возможностей и повышении точности при определении наличия электрических и механических повреждений электродвигателя и связанного с ним механического устройства: межвитковых замыканий обмоток статора, повреждения подшипников, несоосности валов электродвигателя и приводимых электродвигателем устройств, повышенного эксцентриситета ротора (статический и/или динамический), дефектов (обрыв стержней, дефекты литья) ротора, задевания ротора о статор электродвигателя, дефектов передач, соединенных с электродвигателем, дефектов механической части приводимых электродвигателем устройств (насосов, вентиляторов, компрессоров).
Сущность изобретения состоит в том, что способ диагностики электродвигателя переменного тока и связанных с ним механических устройств, предусматривает запись в трех фазах зависимостей от времени напряжения и тока, потребляемых электродвигателем, выполняемую с помощью датчиков тока и напряжения, имеющих линейную амплитудно-частотную характеристику с допустимым отклонением от линейности не более ±3 дБ, с последующим пропусканием через фильтр низких частот с частотой среза выше наибольшей полезной частоты сигнала для недопущения появления ложных спектров, далее преобразуют с помощью аналого-цифрового преобразователя полученные сигналы из аналоговой в цифровую форму, и формируют с помощью вычислительных средств спектры модуля вектора Парка тока и модуля вектора Парка напряжения, после чего производят спектральный анализ полученных спектров векторов Парка напряжения и тока, при котором по совпадению всех линий в спектрах модуля вектора Парка тока и напряжения делают вывод о соответствии спектра тока питающему напряжению в электрической цепи электродвигателя, а при выявлении линий, присутствующих в спектре модуля вектора Парка тока и отсутствующих в спектре модуля вектора Парка напряжения - о несоответствии спектра тока питающему напряжению в электрической цепи электродвигателя, которое может быть обусловлено неисправностью, выделяют для анализа характерные частоты электродвигателя и связанных с ними механических устройств, а характер и степень развития неисправности выявляют путем сравнения значений амплитуд модуля вектора Парка тока на характерных частотах с значением модуля вектора Парка тока на частоте ноль герц, при этом, если амплитуды модуля вектора Парка тока на характерных частотах ниже амплитуды модуля вектора Парка тока на частоте ноль герц на заданную величину, делают вывод о хорошем техническом состоянии электродвигателя и связанных с ним механических устройств, а в случае, если указанная разница между амплитудами меньше заданной величины, делают вывод о наличии соответствующего данной характерной частоте модуля вектора Парка тока повреждения.
При этом формируют спектры модуля вектора Парка тока и напряжения по следующим выражениям:
Id(t)=Ia(t)-(1/2)*Ib(t)-(1/2)*Ic(t)
Iq(t)=sqrt(3)/2*Ib(t)-sqrt(3)/2*Ic(t)
Abs(PI)=sqrt(Id(t)**2+Iq(t)**2)
Ud(t)=Ua(t)-(1/2)*Ub(t)-(1/2)*Uc(t);
Uq(t)=sqrt(3)/2*Ub(t)-sqrt(3)/2*Uc(t);
Abs(PU)=sqrt(Ud(t)**2+Uq(t)**2);
где a, b, с - обозначения фаз, I - ток, U - напряжение.
Кроме того, определяют частоту вращения электродвигателя и число стержней его ротора.
Предпочтительно, каждую запись значений напряжения и тока производят в течение 15-525 с выполняют предпочтительно с разрешением по частоте не менее 0,01-0,2 Гц, с помощью датчиков тока и напряжения с линейной амплитудно-частотной характеристикой, предпочтительно в диапазоне частот от 0 до 10 кГц, в целях снижения эффекта растекания спектра при выполнении спектрального анализа используются оконные функции, выделяют анализируемые частоты с помощью фильтра низких частот ниже частоты Найквиста, преобразование из аналоговой в цифровую форму осуществляют с помощью АЦП с диапазоном не менее 14 разрядов, спектральный анализ и сравнение амплитуд производят, преимущественно, в частотной области от минус 100 дБ до 0 дБ путем выявления пиков (амплитуд модуля вектора Парка напряжения и/или тока) на характерных частотах, при этом характер неисправности выявляют путем сравнения значений амплитуд модуля вектора Парка тока на следующих на характерных частотах: наличие межвитковых замыканий в обмотках статора и повреждения ротора диагностируются на частоте питающей сети, несоосность валов электродвигателя и связанных с электродвигателем механических устройств диагностируется на частотах, кратных частоте вращения электродвигателя, дефекты ременной передачи нагрузки диагностируются на частотах, кратных частоте биений ремня, повреждения подшипника диагностируются на частотах, кратных частоте вращения ротора, повреждения связанных с электродвигателем механических устройств из группы: насос, вентилятор, компрессор диагностируются на лопаточной частоте, причем:
- наличие межвитковых замыканий в обмотках статора диагностируется на следующих характерных частотах:
f=f1·k1,
где f - характерные частоты;
f1 - частота питающей сети;
k1=1-5 - коэффициенты;
- наличие повреждений ротора электродвигателя диагностируется на следующих характерных частотах:
- повреждение стержней ротора (дефекты литья) на характерных частотах как боковых лепестках частоты питания:
f=k2f1,
где k2 - коэффициент, определяемый скольжением ротора при данном режиме работы электродвигателя;
- эксцентриситет ротора на характерных частотах:
f=((R*fг±nd)±k3*fг),
где R - количество стержней ротора;
fг - скорость вращения ротора, Гц;
nd - порядок эксцентриситета, nd=0, 2, 4, 6;
k3 - коэффициент, определяемый гармониками напряжения питающей сети; k3=1;
- наличие задевания ротора о статор электродвигателя диагностируется на следующих характерных частотах:
f=k1·fr/2,
где fr - частота вращения ротора электродвигателя;
- наличие несоосности валов электродвигателя и механической нагрузки диагностируется на следующих характерных частотах:
f=k1·fr;
- наличие повреждения элементов подшипников качения диагностируется на характерных частотах, отражающих наличие неисправностей, связанных с дефектами внутреннего и наружного колец, тел качения и сепаратора подшипника:
f=k1·fn,
где fn - характерные частоты при наличии дефектов элементов подшипника; применяемые для диагностики - внешней обоймы, внутренней обоймы, частота сепаратора, частота тела качения:
- частота перекатывания тел качения по наружному кольцу
fnн=(Dв/(Dв+Dн))·N·fr
- частота перекатывания тел качения по внутреннему кольцу
fnв=(Dн/(Dв+Dн))·N·fr
- частота вращения тел качения
fnш=(Dн/Dш)·(Dв/(Dв+Dн))·fr
- частота сепаратора
fnc=(Dв/(Dв+Dн))·fr,
где Dв - диаметр внутреннего кольца;
Dн - диаметр наружного кольца;
N - количество тел качения;
Dш - диаметр тел качения;
- наличие повреждения ременной передачи диагностируется на характерной частоте собственных колебаний гладкого ремня:
fp=3,14·fв·Dшк/Lp,
где fр - частота собственных колебаний;
fв - частота вращения шкив;
Dшк - диаметр шкива;
Lp - длина ремня;
- наличие повреждения связанных с электродвигателем механических устройств из группы: насос, вентилятор, компрессор диагностируется на характерной лопаточной частоте:
fл=fв·Zл,
где fn - лопаточная частота;
fв - частота вращения рабочего колеса;
Zл - количество лопаток рабочего колеса.
Предпочтительно, измерения и их анализ производят с заданной периодичностью и создают базу данных измерений и результатов сравнения значений амплитуд на характерных частотах с значением сигнала на частоте ноль герц, по которой контролируют развитие повреждений по времени и прогнозируют остаточный ресурс оборудования, и дополнительно производят мониторинг приложенного к электродвигателю напряжения в части наличия несимметрии, импульсов перенапряжений и высших гармонических составляющих с целью выявления причин преждевременного выхода из строя оборудования, обусловленных качеством питающего электродвигатель напряжения.
В целом заявляемый способ основан на спектр-токовом анализе - процедуре записи сигналов потребляемого тока и их последующего специального спектрального анализа в спектрах модуля вектора Парка тока и напряжения для определения наличия электрических и механических неисправностей, с учетом качества приложенного к электродвигателю напряжения. При диагностировании каждый агрегат рассматривается как единая конструкция, состоящая из привода (электродвигатель), редуктора, передачи и механического устройства (насоса, вентилятора и т.п.).
Возможность получения технического результата основана на том, что наличие электрических и механических неисправностей приводит к изменениям магнитного потока (амплитудной модуляции) в воздушном зазоре электрической машины, что дает возможность выявить гармоники тока, характерные для неисправностей оборудования. Питающее напряжение не является идеально синусоидальным, поэтому в получаемых спектрах модуля вектора Парка тока и напряжения присутствуют гармоники, обусловленные качеством питающего напряжения, но неисправности электродвигателя и механической нагрузки вызывают соответствующие гармоники только в спектре тока. Любая модулируемая амплитудной модуляцией характерная частота f учитывается в спектре вектора Парка только один раз.
Гармоники в спектре модуля вектора Парка тока, соответствующие различным видам неисправностей, отличаются друг от друга. Поэтому обнаружение в спектре модуля вектора Парка тока характерных гармоник позволяет однозначно идентифицировать электрические и механические неисправности электродвигателя и приводимого им в действие механического устройства. Необходимые измерения выполняются на работающем оборудовании (не требуется его отключение). Проведение измерений возможно как непосредственно на электродвигателе, так и в электрощите его питания.
Регулярное проведение измерений (мониторинг) оборудования позволяет выявлять неисправности на ранней стадии возникновения, отслеживать динамику их развития, определять остаточный ресурс оборудования и планировать рациональные сроки проведения ремонтов.
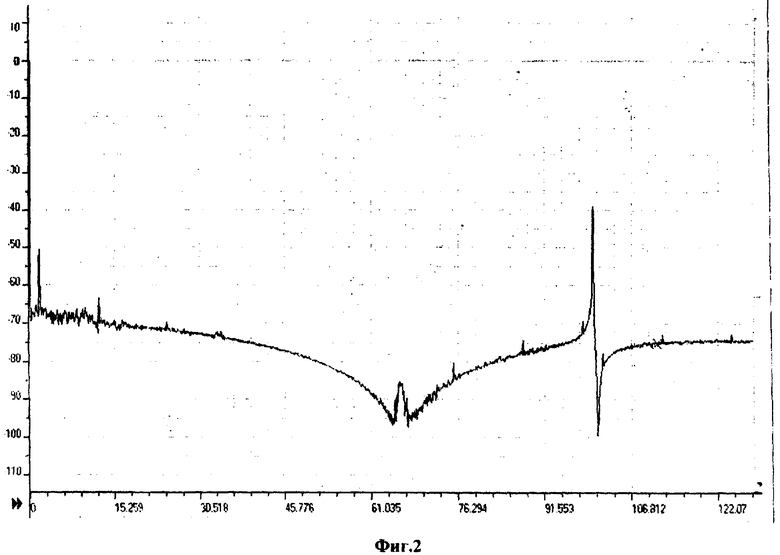
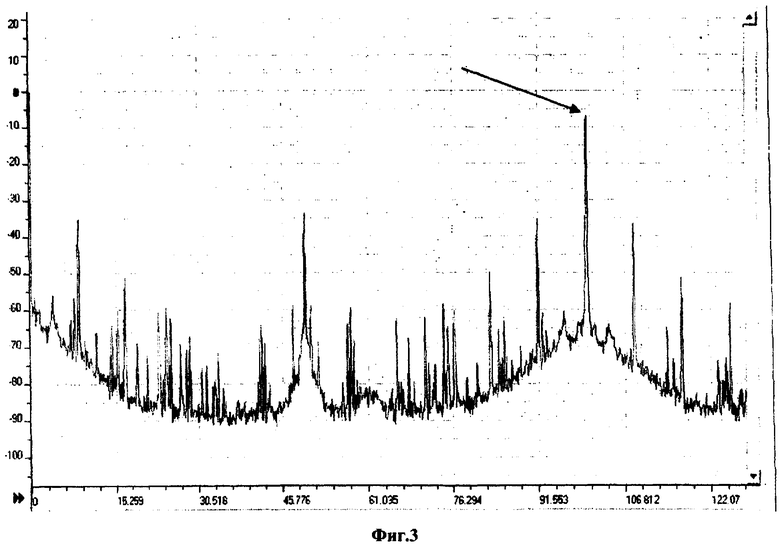
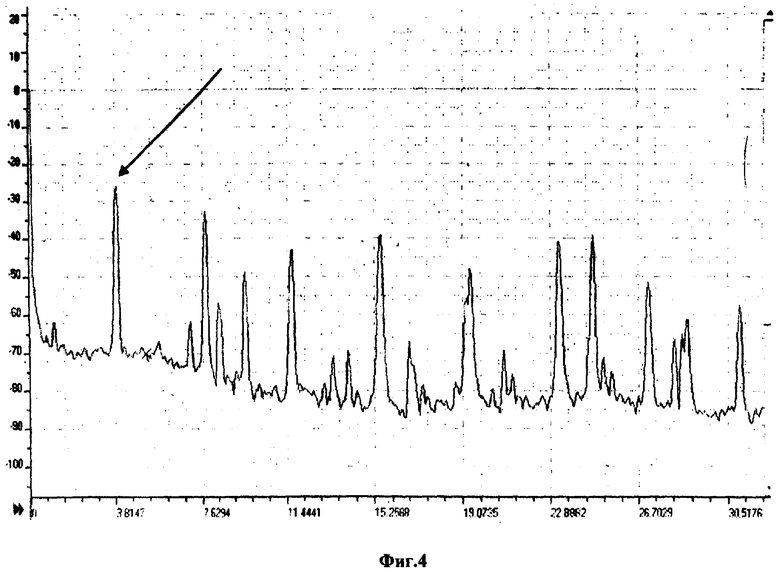
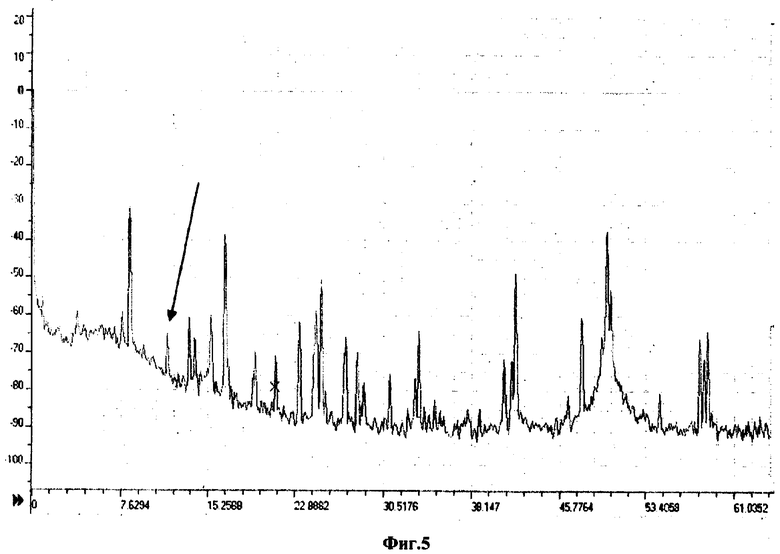
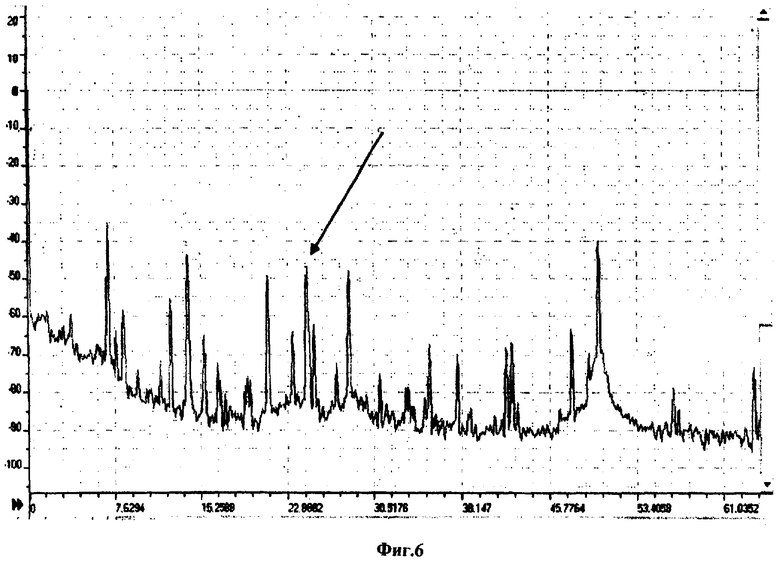
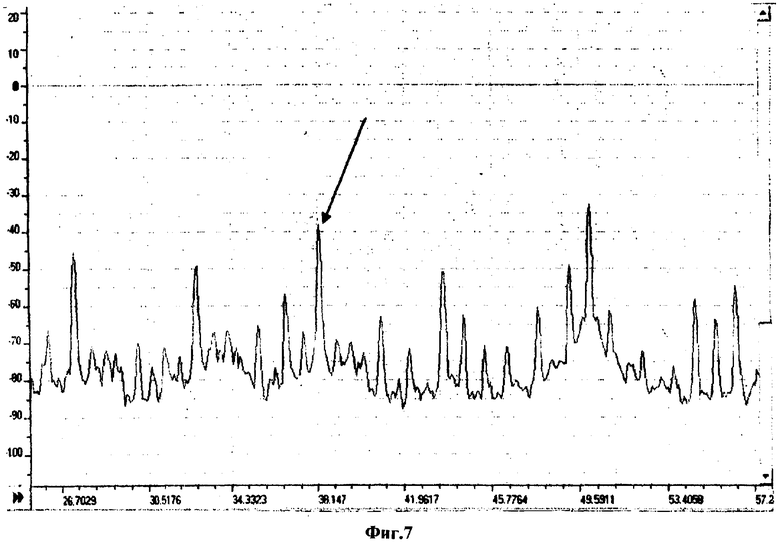
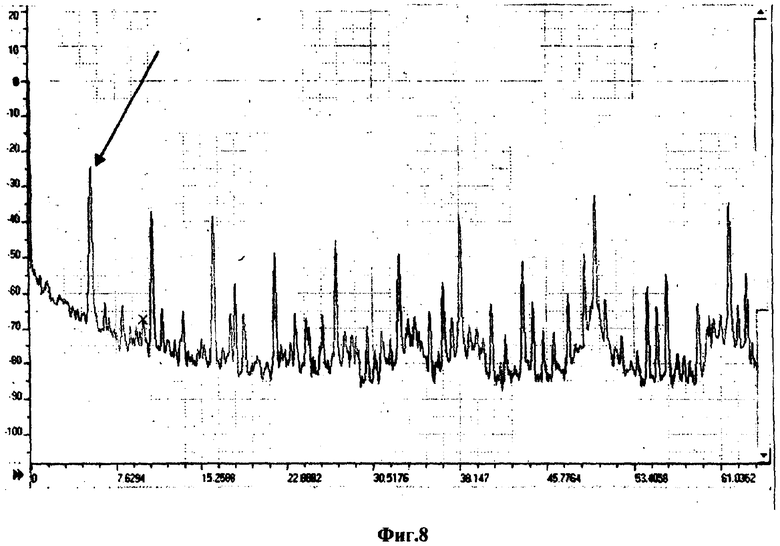
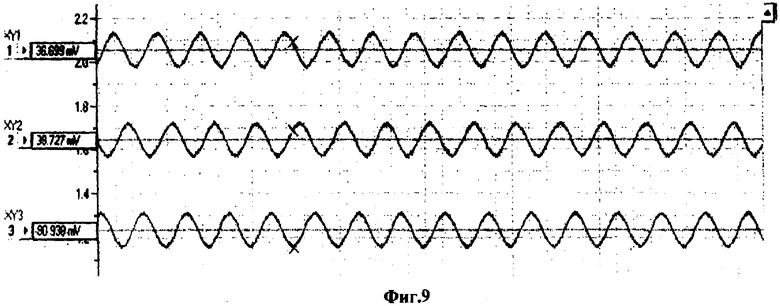
На фиг.1 изображена принципиальная схема измерительного комплекса для реализации способа; на фиг.2 - частотная характеристика модуля вектора Парка тока нового исправного электродвигателя (нагрузка - насос); на фиг.3 - частотная характеристика модуля вектора Парка тока электродвигателя при наличии межвитковых замыканий в обмотках статора; на фиг.4 - частотная характеристика модуля вектора Парка тока электродвигателя при наличии повреждения стержней ротора; на фиг.5 - частотная характеристика модуля вектора Парка тока электродвигателя при наличии задевания ротора о статор электродвигателя; на фиг.6 - частотная характеристика модуля вектора Парка тока электродвигателя при наличии несоосности валов электродвигателя и механического устройства (нагрузки); на фиг.7 - частотная характеристика модуля вектора Парка тока электродвигателя при повреждении сепаратора подшипника; на фиг.8 - частотная характеристика модуля вектора Парка тока электродвигателя при наличии износа передаточного механизма (например, ременной передачи или редуктора); на фиг.9 - пример реальной характеристики (качества) напряжения питания.
Измерительный комплекс для реализации способа содержит следующее оборудование. Портативный компьютер 1, аналогово-цифровой преобразователь 2, датчики тока, например гибкие токоизмерительные клещи «Fluke» (не изображено) и напряжения, имеющие линейную амплитудно-частотную характеристику с допустимым отклонением от линейности не более ±3 дБ, подключенные к соединенному с механическим устройством 3 электродвигателю 4, низкочастотный фильтр 5 (кондиционер сигнала). Устройство 3 представляет собой насос или компрессор и т.п. На чертежах фиг.3 - 8, содержащих частотные характеристики, буквой «f» обозначены характерные частоты, соответствующие диагностируемой неисправности. Амплитуды сигналов откладываются по вертикали, частоты - по горизонтали. На фиг.9 по горизонтали расположена ось времени.
Необходимость наличия указанного фильтра 5 с частотой среза выше наибольшей полезной частоты сигнала для недопущения появления ложных спектров обусловлена тем, что получаемые результаты измерения представляют собой не непрерывную функцию, а выборку значений, полученных с определенным шагом аргумента по времени - Δ. Величину, обратную Δ, называют частотой дискретизации. Половину частоты дискретизации называют частотой Найквиста.

Низкочастотный фильтр должен отфильтровывать (не пропускать) сигналы с частотой, меньшей частоты Найквиста, искажающие диагностическую спектрограмму, т.е. предотвращать возникновение ложных спектральных сигналов.
Диагностирование оборудования производится путем выполнения и последующего анализа данных следующих измерений.
Во всех случаях производится мониторинг и спектральный анализ потребляемого тока работающего электродвигателя.
Для этого производят в трех фазах запись зависимостей от времени напряжения и тока в линии питания электродвигателя 4 в течение достаточного интервала времени, предпочтительно 15-525 с, несколько раз производят запись значений тока, потребляемого электродвигателем, с помощью датчика тока с линейной амплитудно-частотной характеристикой в диапазоне частот от 0 до 10 кГц, подключенного к входу фильтра 5.
Эту запись проводят неоднократно, как правило, пятикратно, с разрешением по частоте не менее 0,01-0,2 Гц. В процессе записи выделяют анализируемые характерные частоты с помощью фильтра 5 низких частот (не пропускающего частоты выше частоты Найквиста).
Для проведения диагностики преобразуют полученный сигнал из аналоговой в цифровую форму с помощью аналого-цифрового преобразователя (АЦП) с диапазоном не менее 14 разрядов, а затем производят спектральный анализ полученного сигнала и спектры модуля вектора Парка тока, полученные при пяти измерениях, усредняют с помощью ЭВМ. Формируют с помощью вычислительных средств спектры модуля вектора Парка тока и модуля вектора Парка напряжения.
Спектры модуля вектора Парка тока и напряжения по следующим выражениям:
Id(t)=Ia(t)-(1/2)*Ib(t)-(1/2)*Ic(t);
Iq(t)=sqrt(3)/2*Ib(t)-sqrt(3)/2*Ic(t);
Abs(PI)=sqrt(Id(t)**2+Iq(t)**2);
Ud(t)=Ula(t)-(1/2)*Ub(t)-(1/2)*Uc(t);
Uq(t)=sqrt(3)/2*Ub(t)-sqrt(3)/2*Uc(t);
Abs(PU)=sqrt(Ud(t)**2+Uq(t)**2);
где a, b, с - обозначения фаз, I - ток, U - напряжение.
После этого производят спектральный анализ полученных спектров векторов Парка напряжения и тока, при котором по совпадению всех линий в спектрах модуля вектора Парка тока и напряжения делают вывод о соответствии спектра тока питающему напряжению в электрической цепи электродвигателя, а при выявлении линий, присутствующих в спектре модуля вектора Парка тока и отсутствующих в спектре модуля вектора Парка напряжения - о несоответствии спектра тока питающему напряжению в электрической цепи электродвигателя, которое может быть обусловлено неисправностью.
Спектральный состав тока любой кабельной линии (в том числе и электрической цепи электродвигателя) определяется характером нагрузки, состоянием нагрузки (например, ЭД или ПК), состоянием самой кабельной линии (контактов и т.п.), спектральным составом приложенного к линии напряжения.
Считая линию электрической цепи исследуемого электродвигателя достаточно короткой (зависимость от времени напряжения в ее начале равно напряжению в конце), чтобы исключить влияние питающего напряжения производится сравнение модулей вектора Парка тока и напряжения. Если по спектральному составу модуль вектора Парка тока и модуль вектора Парка напряжения не совпадают, можно сделать вывод либо о специфическом состоянии или характере нагрузки или о состоянии самой кабельной линии, т.е. о наличии особенностей в электрической цепи электродвигателя.
Вывод о наличии неисправности самого электродвигателя можно сделать, если амплитуды модуля вектора Парка тока на характерных частотах ниже амплитуды модуля вектора Парка тока на частоте ноль герц на заданную величину, делают вывод о хорошем техническом состоянии электродвигателя и связанных с ними механических устройств, а в случае, если указанная разница между амплитудами меньше заданной величины, делают вывод о наличии соответствующего данной характерной частоте модуля вектора Парка тока повреждения.
Исходя из этого выполняется сравнение значений амплитуд модуля вектора Парка тока на частотах, характерных для повреждений, с уровнем сигнала при частоте, равной нулю. Спектральный анализ полученного сигнала и сравнение амплитуд модуля вектора Парка тока производят, преимущественно, в частотной области от минус 100 дБ до 0 дБ путем выявления признаков неисправностей (повреждений) в виде пиков (амплитуды модуля вектора Парка тока) на характерных частотах. В целях снижения эффекта растекания спектра при выполнении спектрального анализа с помощью алгоритма Быстрого Преобразования Фурье (БПФ) используются оконные функции (см. Сергиенко А.Б. «Цифровая обработка сигналов», СПб., 2002, с.608). Диагностика проводится путем обнаружения в спектре модуля вектора Парка тока характерных гармоник, которые позволяют идентифицировать неисправности отдельных узлов.
Для каждого электродвигателя с механическим устройством автоматически рассчитывается свой, уникальный, набор информативных (характерных) частот. Состав этого набора определяется типом электродвигателя, исполнительным механизмом (механическим устройством), видом используемой передачи, характеристиками подшипников и т.д. В расчетной программе используется обобщенная база данных подшипников качения, в которой хранится необходимая информация по параметрам подшипников различных марок. Для определения характерных частот некоторых неисправностей и их диагностики дополнительно определяют частоту вращения электродвигателя и число стержней его ротора.
Наличие межвитковых замыканий в обмотках статора и повреждения ротора диагностируются по наличию пиков в спектре модуля вектора Парка тока, несоосность валов электродвигателя и нагрузки диагностируется по наличию пиков на частотах, кратных частоте вращения электродвигателя, дефекты передачи, например ременной, диагностируются по наличию пиков на частотах, кратных частоте биений ремня, повреждения подшипника диагностируются по наличию пиков на частотах, кратных частоте вращения ротора, повреждения приводимого оборудования из группы: насос, вентилятор, компрессор диагностируются по наличию пиков на лопаточной частоте. При этом расчет характерных частот может быть произведен, например, с помощью следующих эмпирически выявленных соотношений.
Анализ наличия межвитковых замыканий (нарушения изоляции) в обмотках статора (фиг.3) производится путем определения амплитуды на следующих характерных частотах:
f=f1·k1,
где f - характерные частоты;
f1 - частота питающей сети;
k1=1-5 - коэффициенты.
Анализ наличия повреждений ротора электродвигателя производится путем определения амплитуды на следующих характерных частотах:
- повреждение стержней ротора (фиг.4):
определяются амплитуды сигналов на характерных частотах:
f=2k2, где k2 - коэффициент, определяемый скольжением ротора при данном режиме работы электродвигателя;
- эксцентриситет ротора:
определяются амплитуды сигналов на характерных частотах
f=((R*fг±nd)±k3*fг),
где R - количество стержней ротора;
fг - скорость вращения ротора, Гц;
nd - порядок эксцентриситета, nd=0, 2, 4, 6 ...;
k3 - коэффициент, определяемый гармониками напряжения питающей сети; k3=1.
Присутствие динамического или статического эксцентриситета ротора в электродвигателе можно оценить по амплитуде сигнала на характерных частотах динамического или статического эксцентриситета в спектре частот тока потребления статора.
Анализ наличия задевания ротора о статор производится путем определения амплитуды на следующих характерных частотах:
f=k1·fr/2,
где fr - частота вращения ротора электродвигателя.
Анализ наличия несоосности валов электродвигателя и механического устройства, т.е. нагрузки (фиг.6) производится путем определения амплитуды на следующих характерных частотах:
f=k1·fr.
Анализ наличия повреждения элементов подшипников качения (фиг.7) производится путем определения амплитуды на характерных частотах, отражающих наличие неисправностей, связанных с дефектами внутреннего и наружного колец, тел качения и сепаратора подшипника и проявляется в виде сигналов на характерных частотах, кратных частоте вращения ротора.
f=k1·fn,
fn - характерные частоты при наличии дефектов элементов подшипника. Это четыре основные частоты, применяемые для диагностики - внешней обоймы, внутренней обоймы, частота сепаратора, частота тела качения.
Частота перекатывания тел качения по наружному кольцу
fnн=(Dв/(Dв+Dн))·N·fr
Частота перекатывания тел качения по внутреннему кольцу
fnв=(Dн/(Dв+Dн))·N·fr
Частота вращения тел качения
fnш=(Dн/Dш)·(Dв/(Dв+Dн))·fr
Частота сепаратора
fnс=(Dв/(Dв+Dн))·fr,
где Dв - диаметр внутреннего кольца;
Dн - диаметр наружного кольца;
N - количество тел качения;
Dш - диаметр тел качения.
Анализ наличия повреждения ременной передачи (фиг.8) производится путем определения амплитуды на характерной частоте собственных колебаний гладкого ремня
fp=3,14·fв·Dшк/Lp,
где fр - частота собственных колебаний;
fв - частота вращения шкива;
Dшк - диаметр шкива;
Lp - длина ремня.
Анализ наличия повреждения механических лопастных устройств, т.е. приводимого оборудования из группы: насос, вентилятор, компрессор производится путем определения амплитуды на характерной лопаточной частоте.
fл=fв·Zл,
где fл - лопаточная частота;
fв - частота вращения рабочего колеса;
Zл - количество лопаток рабочего колеса.
Расчет частот и обнаружение в спектре тока электродвигателя характерных гармоник производится преимущественно автоматически.
На приведенных фиг.3 - 8 повышение амплитуды при повреждениях на характерных частотах явно видно по одну сторону от частоты ноль герц.
На основании заключений о наличии (отсутствии) повреждений отдельных узлов делается вывод о работоспособности агрегата, как единой конструкции.
Определение степени серьезности повреждений производится по градации «Повреждения отсутствуют» - «Повреждения обнаружены» - «Обнаружены значительные (критичные) повреждения».
Диагностирование неисправностей производится путем сравнения и анализа соответствующих значений амплитуд модуля вектора Парка тока на характерных частотах, т.е. обнаружение в спектре тока характерных гармоник позволяет определить наличие электрических и механических повреждений электродвигателя и связанного с ним механического устройства.
Оценивается уровень амплитуд на характерных частотах относительно пика на частоте, равной нулю. Для двигателя в хорошем состоянии сигналы соответствующих повреждений на характерных частотах обычно на 50-60 дБ ниже амплитуды основного пика на ноль герц. С развитием повреждения разница между пиками уменьшается.
Как правило, дополнительно к измерению потребляемого тока производят мониторинг приложенного к электродвигателю 4 напряжения с целью определения причин возникновения выявленных повреждений, которые могут быть обусловлены качеством питающего напряжения (фиг.9). В течение заданного интервала времени производят запись значений напряжения, приложенного к электродвигателю 4. Измерение производится между нулевым рабочим проводником N и каждой фазой с помощью делителей или трансформаторов напряжения (не изображены), подключенных к соответствующим каналам АЦП.
Мониторинг напряжения позволяет определить несимметрию, наличие высших гармонических составляющих и импульсов перенапряжений, т.е. тех факторов, которые напрямую влияют возникновение дефектов и, следовательно, на срок службы и экономичность работы двигателя. При изменении напряжения изменяется механическая характеристика - зависимость вращающего момента от скольжения. При снижении напряжения уменьшается вращающий момент и частота вращения, т.к. увеличивается его скольжение, причем при неизменной потребляемой мощности увеличивается ток, потребляемый из сети, и происходит интенсивный нагрев обмоток, что сокращает срок службы электродвигателя. Таким образом, результаты мониторинга приложенного напряжения должны учитываться при прогнозировании развития повреждения и определении остаточного ресурса электродвигателя.
При несимметрии напряжений сети в электрических машинах наряду с возникновением дополнительных потерь активной мощности и нагревом статора и ротора могут возникнуть опасные вибрации в результате появления знакопеременных вращающих моментов и тангенциальных сил, пульсирующих с двойной частотой сети.
Несинусоидальность питающего напряжения приводит к ускоренному старению изоляции, дополнительным потерям мощности двигателя, а также значительному сокращению срока службы подшипников за счет возникновения встречно направленных моментов вращения.
Высшие гармоники напряжения вызывают дополнительные потери активной мощности в электрических машинах, так как сопротивления их элементов зависят от частоты.
Высшие гармоники вызывают паразитные поля и электромагнитные моменты в синхронных и асинхронных двигателях, которые ухудшают механические характеристики и КПД машины, а также коэффициент мощности электродвигателя.
«Высокий уровень гармонических искажений питающего напряжения может вызвать серьезный перегрев электродвигателя с последующим отключением, чрезмерный акустический шум и вибрации, повреждения подшипников (срок службы которых может снизиться до 10% от номинального) и нарушения креплений из-за высокого уровня вибрации». См., например, Уильяме Т., Армстронг К. «ЭМС для систем и установок». М.: Издательский Дом «Технологии», 2004 г., 508 с.
Измерения тока и напряжения и их анализ производят с определенной периодичностью, подбираемой эмпирически, и создают базу данных измерений и результатов их анализа, по которой контролируют развитие повреждений по времени и определяют остаточный ресурс оборудования. По каждому из измерений сохраняются полный список частот и их амплитуд, характерных для данного агрегата, характерные частоты и их амплитуды для каждого вида повреждений.
В результате в процессе эксплуатации можно проследить динамику фактического развития отдельных повреждений в графическом виде по обработанным частотным характеристикам и прогнозировать их дальнейшее развитие, а с учетом мониторинга напряжения более точно прогнозировать развитие повреждений, обусловленных качеством питающего электродвигатель напряжения.
Таким образом, создан эффективный и удобный способ диагностики, а также расширен арсенал способов диагностики электродвигателей переменного тока и связанных с ними механических устройств.
При этом повышена точность диагностирования, обеспечена возможность дистанционного диагностирования (на расстоянии от электродвигателя - в электрощите питания и/или управления), упрощена процедура диагностирования (не требует отключения электродвигателя и/или снятия нагрузки), обеспечена возможность полной автоматизации процесса диагностики. Расширены диагностические возможности для определения наличия электрических и механических повреждений электродвигателя и связанного с ним механического устройства, в частности: межвитковые замыкания обмоток статора, повреждения подшипников, несоосность валов электродвигателя и приводимых электродвигателем устройств, повышенный эксцентриситет ротора (статический и/или динамический), дефекты (обрыв стержней, дефекты литья) ротора, задевание ротора о статор электродвигателя, дефекты передач, соединенных с электродвигателем, дефекты механической части приводимых электродвигателем устройств (насосов, вентиляторов, компрессоров).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ДИАГНОСТИКИ ЭЛЕКТРОДВИГАТЕЛЕЙ ПЕРЕМЕННОГО ТОКА И СВЯЗАННЫХ С НИМИ МЕХАНИЧЕСКИХ УСТРОЙСТВ | 2005 |
|
RU2300116C2 |
| Способ мониторинга вибрации щеточно-коллекторных узлов электродвигателей постоянного тока | 2019 |
|
RU2730109C1 |
| СПОСОБ ДИАГНОСТИКИ СИЛОВОЙ ЭЛЕКТРИЧЕСКОЙ ЦЕПИ ПЕРЕМЕННОГО ТОКА | 2007 |
|
RU2338215C1 |
| СПОСОБ ДИАГНОСТИКИ И ОЦЕНКИ ОСТАТОЧНОГО РЕСУРСА ЭЛЕКТРОПРИВОДОВ ПЕРЕМЕННОГО ТОКА | 2009 |
|
RU2425390C1 |
| СПОСОБ ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ЭЛЕКТРОДВИГАТЕЛЯ ПО ЕГО ЭЛЕКТРИЧЕСКИМ ПАРАМЕТРАМ | 2009 |
|
RU2425391C1 |
| СПОСОБ ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ЭЛЕКТРОПРИВОДНОГО ОБОРУДОВАНИЯ | 2013 |
|
RU2552854C2 |
| СПОСОБ ДИАГНОСТИРОВАНИЯ ОБОБЩЁННОГО ТЕХНИЧЕСКОГО СОСТОЯНИЯ ЭЛЕКТРОДВИГАТЕЛЯ | 2016 |
|
RU2641318C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО КОНТРОЛЯ МЕХАНИЧЕСКИХ ПОВРЕЖДЕНИЙ ТРЕХФАЗНЫХ АСИНХРОННЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ | 2007 |
|
RU2356061C1 |
| Способ диагностирования технического состояния электрических двигателей по анализу сигналов тока | 2024 |
|
RU2829015C1 |
| УСТРОЙСТВО И СПОСОБ ОЦЕНКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ АСИНХРОННЫХ ДВИГАТЕЛЕЙ | 2019 |
|
RU2711647C1 |
Изобретение относится к области диагностики электродвигателей переменного тока. Согласно изобретению, в трех фазах электродвигателя производят запись зависимостей от времени напряжения и потребляемого тока, полученные сигналы пропускают через фильтр низких частот, преобразуют в цифровую форму и формируют спектры модулей вектора Парка тока и напряжения, после чего производят спектральный анализ полученных спектров. Выделяют характерные частоты электродвигателя и связанных с ним устройств, а характер и степень развития неисправности выявляют путем сравнения значений амплитуд модуля вектора Парка тока на характерных частотах с значением модуля вектора Парка тока на частоте ноль герц. Этим обеспечивается повышение точности дистанционного диагностирования при его полной автоматизации и расширении диагностических возможностей. 10 з.п. ф-лы, 9 ил.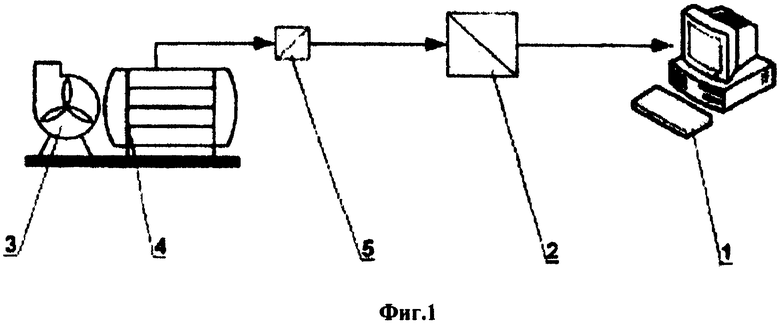
Id(t)=Ia(t)-(1/2)*Ib(t)-(1/2)*Ic(t);
Iq(t)=sqrt(3)/2*Ib(t)-sqrt(3)/2*Ic(t);
Abs(PI)=sqrt(Id(t)**2+Iq(t)**2);
Ud(t)=Ua(t)-(1/2)*Ub(t)-(1/2)*Uc(t);
Uq(t)=sqrt(3)/2*Ub(t)-sqrt(3)/2*Uc(t);
Abs(PU)=sqrt(Ud(t)**2+Uq(t)**2);
где a, b, с - обозначения фаз, I - ток, U - напряжение.
f=f1·k1,
где f - характерные частоты;
f1 - частота питающей сети;
k1=1-5 - коэффициенты;
наличие повреждений ротора электродвигателя диагностируется на следующих характерных частотах:
эксцентриситет ротора на характерных частотах:
f=((R*fг±nd)±k3*fг),
где R - количество стержней ротора;
fг - скорость вращения ротора, Гц;
nd - порядок эксцентриситета, nd=0,2,4,6...;
k3 - коэффициент, определяемый гармониками напряжения питающей сети; k3=1;
наличие задевания ротора о статор электродвигателя диагностируется на следующих характерных частотах:
f=k1·fr/2,
где fг - частота вращения ротора электродвигателя;
наличие несоосности валов электродвигателя и механической нагрузки диагностируется на следующих характерных частотах:
f=k1·fr,
наличие повреждения элементов подшипников качения диагностируется на характерных частотах, отражающих наличие неисправностей, связанных с дефектами внутреннего и наружного колец, тел качения и сепаратора подшипника:
f=k1·fn,
где fn - характерные частоты при наличии дефектов элементов подшипника, применяемые для диагностики - внешней обоймы, внутренней обоймы, частота сепаратора, частота тела качения:
частота перекатывания тел качения по наружному кольцу
fnн=(Dв/(Dв+Dн))·N·fr;
- частота перекатывания тел качения по внутреннему кольцу
fnв=(Dн/(Dв+Dн))·N·fr;
- частота вращения тел качения
fnш=(Dн/Dш)·(Dв/(Dв+Dн)·fr;
- частота сепаратора
fnс=(Dв/(Dв+Dн)·fr,
где Dв - диаметр внутреннего кольца;
Dн - диаметр наружного кольца;
N - количество тел качения;
Dш - диаметр тел качения;
- наличие повреждения ременной передачи диагностируется на характерной частоте собственных колебаний гладкого ремня:
fp=3,14·fв·Dшк/Lp,
где fp - частота собственных колебаний;
fв - частота вращения шкива;
Dшк - диаметр шкива;
Lp - длина ремня;
- наличие повреждения связанных с электродвигателем механических устройств из группы: насос, вентилятор, компрессор диагностируется на характерной лопаточной частоте:
fл=fв·Zл,
где fл - лопаточная частота;
fв - частота вращения рабочего колеса;
Zл - количество лопаток рабочего колеса.
| RU 2005110648 А, 20.10.2006 | |||
| СПОСОБ ДИАГНОСТИКИ МЕХАНИЗМОВ И СИСТЕМ С ЭЛЕКТРИЧЕСКИМ ДВИГАТЕЛЕМ | 2004 |
|
RU2269759C1 |
| УСТРОЙСТВО ДЛЯ ЗАЩИТЫ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ ОТ РАЗРУШЕНИЯ ПОДШИПНИКОВ | 1995 |
|
RU2095909C1 |
| Способ защиты асинхронного электродвигателя от перегрузки | 1988 |
|
SU1642548A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОЛЬЖЕНИЯ РОТОРА АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2209442C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ДЕФЕКТОВ В ОБМОТКАХ ЯКОРЕЙ ЭЛЕКТРИЧЕСКИХ МАШИН | 0 |
|
SU399794A1 |
| Способ контроля обрыва стержня ротора короткозамкнутого асинхронного электродвигателя | 1983 |
|
SU1121633A1 |
| ГЕМКЕ Р.Г | |||
| Неисправности электрических машин | |||
| - Л.: Энергия, 1975, с.161 | |||
| ЖЕРВЕ Г.К | |||
| Промышленные испытания электрических машин | |||
| ГЭИ | |||
| - М.-Л., 1959, с.441-442 | |||
| JP | |||

