ОБЛАСТЬ ТЕХНИКИ
Это изобретение относится к приводам на основе электроактивного полимера и устройствам или системам, включающим в себя такие приводы, а также к способам возбуждения таких приводов. Оно дополнительно относится к реализуемому на компьютере изобретению для выполнения способов.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
Приводы на основе электроактивного полимера представляют собой устройства, которые могут преобразовывать электрический входной сигнал в такой (механический) выходной сигнал, как, например, сила или давление, или наоборот. Таким образом ЭАП-приводы могут использоваться в качестве механических приводов и в зависимости от используемых ЭАП часто также в качестве датчиков. С этой целью они содержат электроактивные полимеры (ЭАП), которые могут деформироваться или изменять форму под влиянием стимула или сигнала активации (приведения в действие). Некоторые примеры возбуждаемых полем ЭАП включают пьезоэлектрические полимеры, электрострикционные полимеры (такие как полимеры-релаксоры на основе ПВДФ) и диэлектрические эластомеры, но существуют и другие.
При изготовлении ЭАП-приводам могут быть легко приданы различные формы, позволяющие простую интеграцию в большое разнообразие систем, например, таких как медицинские устройства и бытовые приборы. Кроме того, приводы/сенсоры на основе ЭАП соединяют высокие механическое напряжение и деформацию с такими характеристиками, как: низкая мощность, небольшой форм-фактор, гибкость, бесшумная работа, точная работа, возможность высокого разрешения, быстрый отклик и циклическая активация.
Обычно характеристики ЭАП-приводов делают их полезными, например, для любого применения, где доступно небольшое пространство и в котором желательна небольшая величина перемещения компонента или элемента на основе электрической активации. Аналогичным образом, технология может использоваться для обнаружения небольших перемещений.
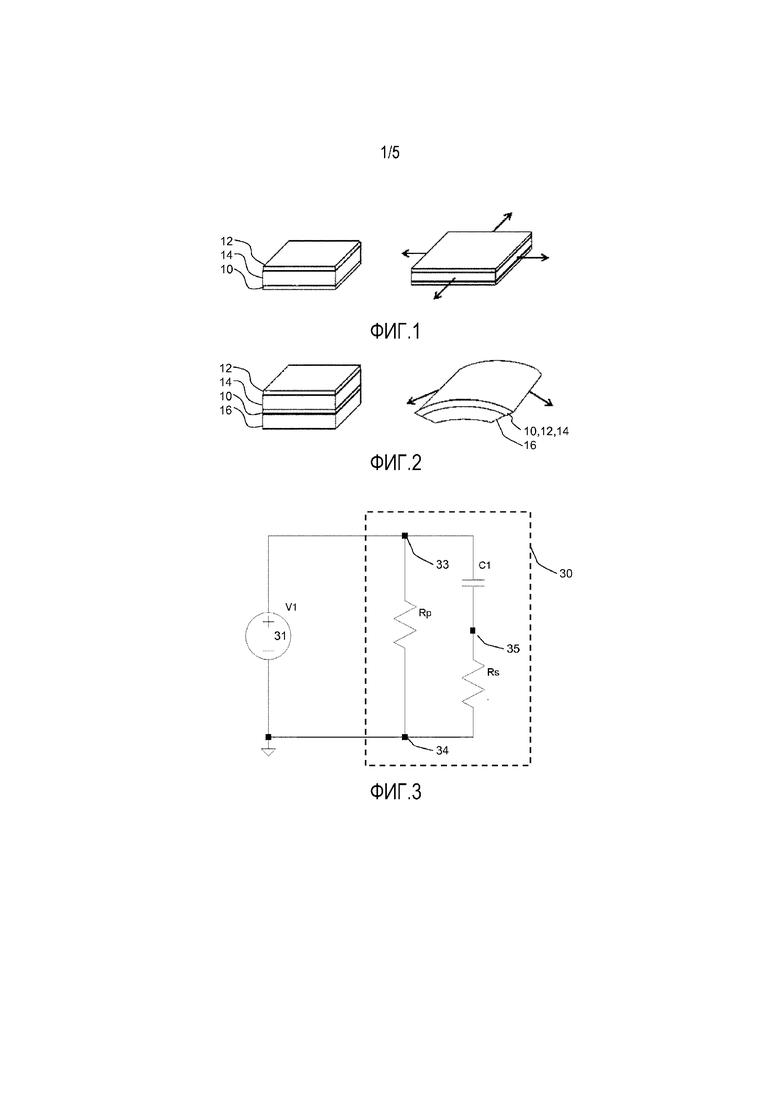
Фиг.1 и 2 показывают два возможных режима работы для примерного ЭАП-привода. Он содержит ЭАП-структуру, включающую ЭАП-слой 14, размещенный между электродами 10, 12 на противоположных сторонах от ЭАП-слоя 14. Фиг.1 показывает привод, который не зажат (не прикреплен) никаким несущим слоем или подложкой. Чтобы вызвать расширение ЭАП-слоя во всех направлениях, как показано, используется поданное на электроды напряжение возбуждения. Фиг.2 показывает привод, который разработан таким образом, чтобы расширение возникало только в одном направлении. В этом случае сходная с показанной на фиг.1 ЭАП-структура поддерживается и зажимается, т.е. механически прикрепляется к несущему слою 16. Чтобы вызвать расширение ЭАП-слоя во всех направлениях, как указано для фиг.1, снова используется поданное на электроды напряжение. Однако зажим ограничивает фактическое расширение, так что вместо этого вызывается изгибание в дугу всей структуры. Таким образом, характер этого движения изгиба является результатом взаимодействия между пассивным несущим слоем и активным слоем, который расширяется при приведении в действие.
Оказывается, что когда такой ЭАП-привод, как привод по фиг.1 и 2, активируется с использованием электрической схемы возбуждения, фактический желаемый механический отклик на приведение в действие отклоняется от желаемого относительно синхронизации и/или состояния активации (приведения в действие). Например, между началом возбуждения и достижением желаемого состояния активации возникает некоторая временная задержка. Это несоответствие препятствует применению ЭАП-устройств, поскольку, например, затруднен быстрый и точный механический отклик.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Задача изобретения состоит в предоставлении улучшенного ЭАП-привода относительно упомянутого несоответствия.
Эта задача по меньшей мере частично решается изобретением, которое охарактеризовано независимыми пунктами формулы изобретения. Зависимые пункты формулы изобретения обеспечивают преимущественные варианты осуществления.
Устройство и способ по изобретению используют привод, который содержит структуру на основе электроактивного полимера для подачи механического выходного сигнала на активацию, зависящего от сигнала возбуждения, поданного на привод. Такой сигнал может быть подан с использованием электродов. Таким образом, первое напряжение заставляет структуру достигнуть первого состояния активации, в то время как второе напряжение, отличающееся от первого напряжения, заставляет ее достигнуть второго состояния активации, отличающегося от первого состояния активации. С этой целью структура на основе электроактивного полимера содержит электроактивный полимер (ЭАП), который способен изменять свою форму при подаче сигнала возбуждения. Примеры таких ЭАП-структур описаны со ссылкой на фиг.1 и 2, но существуют и другие, и изобретение не ограничено этими примерами.
Изобретение основано на понимании, что ЭАП-структура имеет электрический импеданс, включающий в себя емкостное сопротивление конденсатора, задаваемое структурой ЭАП и электродами и/или конфигурацией других слоев. Механическое приведение в действие ЭАП-структуры зависит от электрического поля в пределах и тем самым электрического заряда на действующем конденсаторе. Это обусловлено тем, что привод либо возбуждается электрическим полем, и такое поле зависит от заряда, либо возбуждается током, и ток опять же вызван электрическим полем. Таким образом, «внутренне присущая» скорость переключения привода зависит от скорости зарядки этого действующего конденсатора. Вследствие импеданса емкостному заряду, необходимому для достижения определенной позиции (состояния) ЭАП-структуры при механическом приведении в действие, требуется время для накопления до заданного уровня. Следовательно, такой уровень заряда достигается лишь после интервала времени, кратного характеристической константе времени. Обычно максимальное расширение при приведении в действие (или конечная позиция) для заданного сигнала возбуждения достигается после интервала времени, составляющего пятикратную характеристическую константу времени. Для применений, где необходим быстрый отклик с ограниченным временем задержки или требуется более высокая частота работы, это поведение может представлять собой недостаток и препятствовать использованию ЭАП-приводов.
Таким образом, изобретение использует сигнал возбуждения, который содержит:
- период перевозбуждения, в котором напряжение сигнала возбуждения изменяется от первого напряжения до напряжения перевозбуждения на величину, которая превышает разность между вторым напряжением и первым напряжением; и
- после периода перевозбуждения период удержания, по меньшей мере в начале которого напряжение сигнала возбуждения представляет собой второе напряжение.
Разность всегда вычисляется путем вычитания значения первого напряжения (включая знак) из значения второго напряжения (включая знак). Следовательно, изменение напряжения и его направление также обозначены разностью, представляющей собой увеличение напряжения для переключения на второе напряжение, большее, чем первое напряжение, и уменьшение напряжения для переключения с более высокого первого напряжения на более низкое второе напряжение. В период удержания, в его начале, напряжение по меньшей мере достигло второго напряжения. Оно может поддерживаться неизменным, но также может изменяться, как указано ниже, для поддержания второго состояния активации неизменным.
С помощью изобретения можно управлять зарядкой или разрядкой до состояния желаемой активации привода, сокращая задержку при достижении этого состояния желаемой активации, и это может расширить объем возможных применений ЭАП-приводов. Изобретение также обеспечивает, чтобы уровни активации могли быть достигнуты с по-прежнему хорошей точностью, т.е. с заданным выбросом за пределы активации или даже без существенного выброса за пределы активации.
Первое состояние активации может иметь более высокий уровень активации, чем второе состояние активации, или наоборот. Первое состояние активации или второе состояние активации во время действия переключения могут представлять собой состояние покоя привода, т.е. состояние активации, которое поддерживается приводом без какого-либо возбуждения.
Первое напряжение или второе напряжение в идеальном случае являются неизменными напряжениями. В этом случае состояние активации может удерживаться путем непрерывной подачи его соответствующего напряжения. Однако в менее идеальных случаях (приводы) эти напряжения могут (медленно) изменяться. Таким образом, первое и/или второе напряжение могут непрерывно или периодически изменяться во времени, поддерживая привод в его неизменном соответствующем состоянии активации.
В изобретении второе напряжение может быть подано только тогда, или после того, как структура на основе электроактивного полимера достигает второго состояния активации впервые во время подачи электрического сигнала возбуждения.
Это может контролироваться с помощью обратной связи или нет.
В изобретении второе напряжение может поддерживаться по меньшей мере так же долго, как напряжение перевозбуждения, или по меньшей мере в два раза дольше, чем напряжение перевозбуждения. Таким образом, приведение в действие представляет собой по существу низкочастотное возбуждение привода в том смысле, что полное приведение в действие намного дольше, чем продолжительность перевозбуждения, и напряжение на структуре на основе электроактивного полимера стабилизируется. Период удержания может быть по меньшей мере в 5 раз дольше, по меньшей мере в 10 раз дольше или даже по меньшей мере в 50 раз дольше, чем период перевозбуждения.
В изобретении структура на основе электроактивного полимера может содержать электроды для приема сигнала возбуждения, при этом электроды характеризуют конденсатор, имеющий емкость, и
- напряжение перевозбуждения подается до тех пор, пока напряжение на емкости не будет отличаться от второго напряжения на заданную величину, и впоследствии изменяется на второе напряжение. Заданная величина может быть меньше значения, выбранного из группы, состоящей из 50%, 20%, 10%, 5%, 2%, 1%, 0%. Следовательно, может быть достигнуто быстрое увеличение напряжения на емкости до значения, близкого ко второму напряжению, что дает прирост скорости переключения. Если заданная величина составляет 0%, то прирост скорости оптимален для используемой формы сигнала напряжения перевозбуждения.
Напряжение перевозбуждения может подаваться до тех пор, пока напряжение на емкости не станет составлять или быть ниже второго напряжения. Таким образом, даже при том, что напряжение перевозбуждения больше необходимого для достижения состояния желаемой активации, емкость структуры на основе электроактивного полимера никогда не подвергается воздействию этого напряжения.
Напряжение перевозбуждения может подаваться до тех пор, пока напряжение на емкости не превысит второе напряжение на заданную величину, так что впоследствии напряжение возвращается ко второму напряжению. Это подает сигнал временного перевозбуждения на емкость структуры на основе электроактивного полимера. Поскольку такое напряжение перевозбуждения на емкости может быть достигнуто с помощью механической перегрузки, этот вариант осуществления может использоваться для обеспечения усиленного ощущения тактильного интерфейса, ощущаемого как короткий всплеск движения, наложенный на более плавную вибрацию.
В изобретении в период перевозбуждения напряжение перевозбуждения может быть:
- по существу неизменным или
- изменяющимся от начального значения до второго напряжения.
Напряжение возбуждения может содержать пошаговое увеличение напряжения перевозбуждения до начального значения и последующее изменение от этого значения до второго напряжения. Это обеспечивает более постепенное изменение от напряжения перевозбуждения до нормального напряжения. Начальное значение напряжения, например, по меньшей мере на 20% или по меньшей мере на 10% выше второго напряжения, а время, затрачиваемое на достижение второго напряжения, составляет по меньшей мере 2 с. Уменьшение во времени в период перевозбуждения может быть обеспечено как:
участок линейно уменьшающегося напряжения; или
первый участок линейно уменьшающегося напряжения и последующий второй участок линейно уменьшающегося напряжения с различными линейными наклонами.
Эта двухсегментная схема компенсирует различные механизмы релаксации в ЭАП-приводе. Первый участок может иметь продолжительность от 0,5 с до 5 с, а второй участок может иметь продолжительность от 1 с до 20 с.
Пошаговое увеличение может сделать напряжение перевозбуждения больше первого напряжения в течение менее 0,5 с. Это обеспечивает более высокий всплеск перевозбуждения напряжения перед уровнем перевозбуждения, который затем уменьшается более постепенно.
В изобретении период цикла, содержащего период перевозбуждения и период удержания, может быть больше периода, соответствующего резонансной частоте структуры на основе электроактивного полимера. Таким образом, управление происходит не на резонансной частоте, а на меньшей частоте.
Изобретение может быть реализовано в компьютерном программном продукте, содержащем считываемый компьютером код, хранимый, сохраняемый или загружаемый из сети связи, который при его исполнении на компьютере вызывает выполнение драйвером этапов способов по изобретению.
Изобретение обеспечивает устройство, имеющее привод, содержащий структуру на основе электроактивного полимера и драйвер, выполненный с возможностью подавать сигнал возбуждения, который охарактеризован здесь выше, на структуру на основе электроактивного полимера. Устройство извлекает выгоду из признаков и преимуществ, описанных относительно вышеприведенных способов. Это обеспечит улучшенный отклик переключения, возможно в сочетании с сохраненной или даже улучшенной точностью приведения в действие (срабатывания).
В устройстве по изобретению привод или структура на основе электроактивного полимера содержат электроды, подключенные к драйверу и предназначенные для подачи сигнала возбуждения на структуру на основе электроактивного полимера.
Устройство по изобретению может содержать память, хранящую справочную таблицу, перечисляющую множество элементов данных действий переключения, причем каждый элемент данных относится к конкретному действию переключения из первого состояния активации во второе состояние активации и обеспечивает для по меньшей мере одного отклика переключения значение времени, достижимое для этого конкретного переключения, напряжение и продолжительность сигнала перевозбуждения. Следовательно, если для конкретного действия переключения требуется заданное время отклика, подходящее напряжение перевозбуждения может быть найдено и использовано драйвером. Альтернативно, если конкретное напряжение перевозбуждения является обязательно достижимым, может быть возвращено время отклика.
Устройство может дополнительно содержать систему с обратной связью для:
- определения состояния активации привода, и
исходя из определенного состояния активации, установки и/или изменения одного или более элемента группы, состоящей из: уровня, продолжительности или формы сигнала напряжения перевозбуждения. Система с обратной связью может содержать датчик смещения или управление драйвером с обратной связью (замкнутого типа) для регулировки таких параметров сигнала возбуждения, как уровни и продолжительность напряжения.
Следовательно, может быть достигнуто управление электрическим сигналом возбуждения в режиме реального времени, и может быть достигнуто перевозбуждение, дающее оптимальную скорость переключения и/или улучшение точности.
Устройство по изобретению может содержать память, хранящую компьютерный программный продукт по п.11, и микропроцессор для исполнения хранимого компьютерного программного продукта. Такая память может представлять собой электрическую памятью в виде оперативного запоминающего устройства (ОЗУ) или постоянного запоминающего устройства (ПЗУ).
Устройство-драйвер может быть предназначено для:
- подачи первого электрического сигнала возбуждения в виде сигнала прямоугольной формы поверх второго электрического сигнала возбуждения; или
- подачи первого электрического сигнала возбуждения в виде сигнала поверх второго электрического сигнала возбуждения с уступом в начале и наклонным задним фронтом в конце.
Эти сигналы предпочтительно являются сигналами напряжения. Прямоугольная форма сигнала может называться сигналом перевозбуждения или напряжением перевозбуждения. Таким образом, существуют различные возможные формы для первого электрического сигнала возбуждения.
Таким образом, существуют разные способы использования функции перевозбуждения в зависимости от желаемой скорости отклика, максимального напряжения на емкости устройства или требуемого механического отклика.
Электроактивные приводы по изобретению обычно электрически возбуждают либо через зависимость от электрического поля, либо через зависимость от заряда (ионную) или тока. В качестве примера работы ЭАП-привода, возбуждаемые полем ЭАП приводятся в действие электрическим полем через прямую электромеханическую связь. Они обычно требуют высоких полей (вольты на метр), но низких токов. Полимерные слои обычно являются тонкими, чтобы поддерживать напряжение возбуждения насколько возможно низким.
Примеры возбуждаемых полем ЭАП включают пьезоэлектрические полимеры, электрострикционные полимеры (такие как полимеры-релаксоры на основе ПВДФ) и диэлектрические эластомеры. Другие примеры включают электрострикционные привитые полимеры, электрострикционную бумагу, электреты, электровязкоупругие эластомеры и жидкокристаллические эластомеры.
Возбуждаемые зарядом или ионные ЭАП приводятся в действие вызванным электричеством переносом ионов и/или растворителем. Для них обычно требуются низкие напряжения, но более высокие токи. Для них обычно требуется жидкая/гелевая электролитная среда, хотя некоторые системы материалов также могут работать с использованием твердых электролитов. Примерами возбуждаемых зарядом ЭАП являются сопряженные/проводящие полимеры, ионные полимер-металлические композиты (ИПМК) и углеродные нанотрубки (УНТ). Другие примеры включают в себя ионные полимерные гели.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Примеры изобретения будут теперь описаны подробно со ссылкой на приложенные схематические чертежи, на которых:
Фиг.1 показывает известный ЭАП-привод, который не ограничен и таким образом расширяется в плоскости;
Фиг.2 показывает известный ЭАП-привод, который ограничен и таким образом деформируется из плоскости;
Фиг.3 показывает эквивалентную цепь ЭАП-привода;
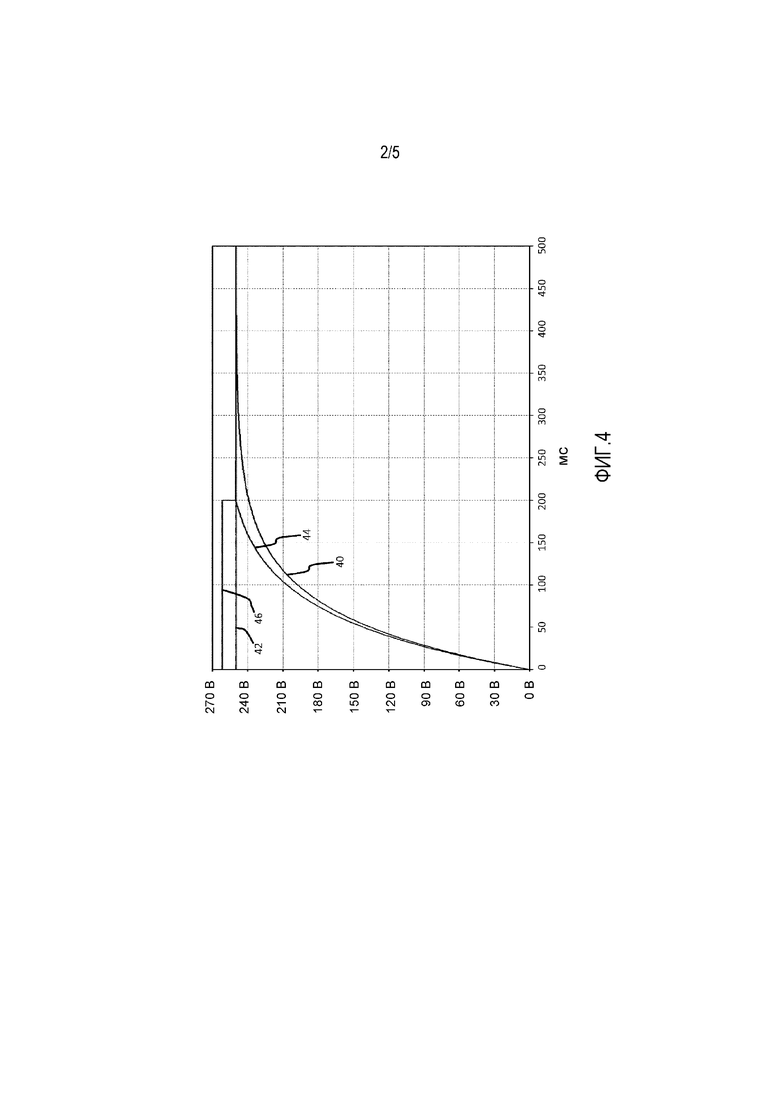
Фиг.4 показывает схему традиционного возбуждения и схему возбуждения в соответствии с первым примером; ось X: от 0 до 500 миллисекунд с 50 мс на деление и ось Y: от 0 до 270 В с 30 В на деление.
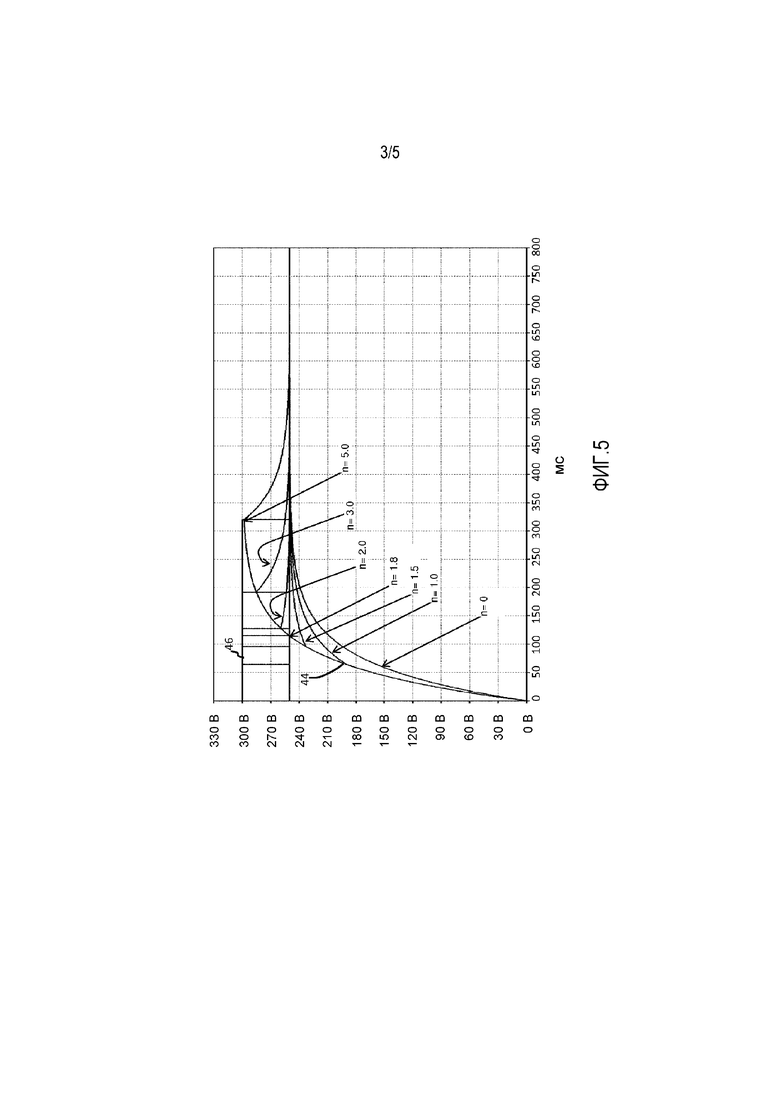
Фиг.5 показывает схему традиционного возбуждения и набор схем возбуждения в соответствии со вторым примером. Ось X: от 0 до 800 миллисекунд с 50 мс на деление и ось Y: от 0 до 330 В с 30 В на деление;
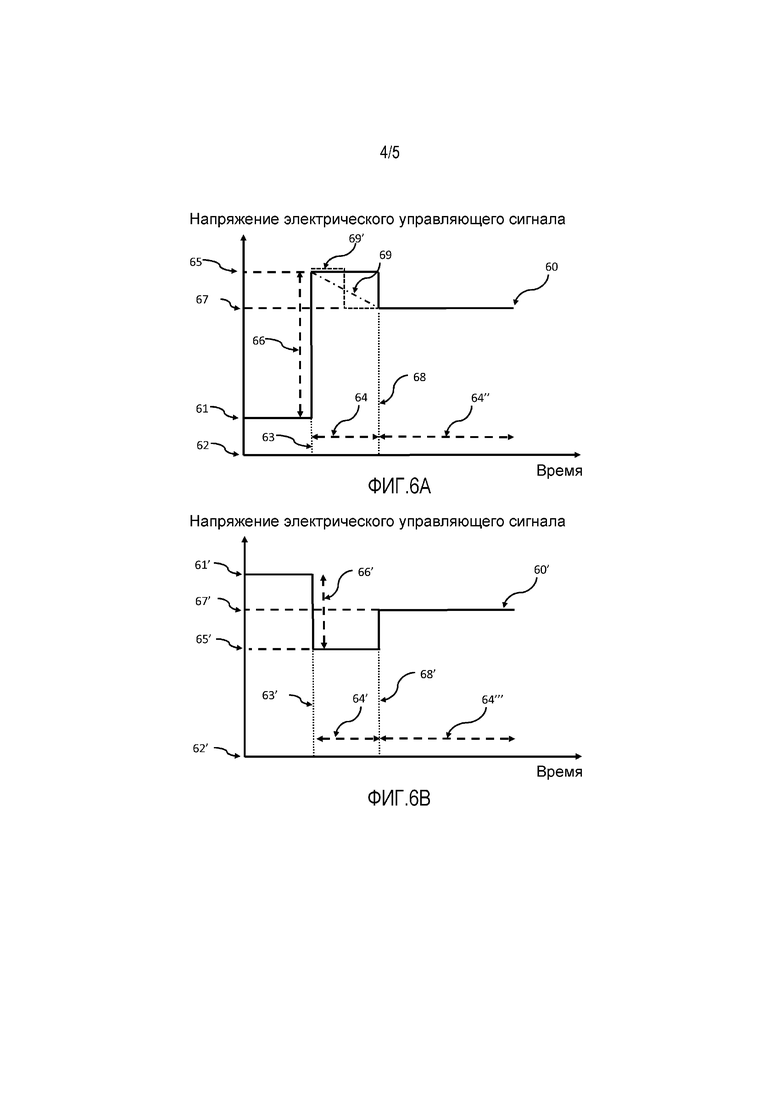
Фиг.6А и 6B показывают сигналы возбуждения для переключения из состояния слабой активации в состояние сильной активации и соответственно наоборот. Вертикальная ось представляет собой напряжения, горизонтальные оси приведены в единицах времени;
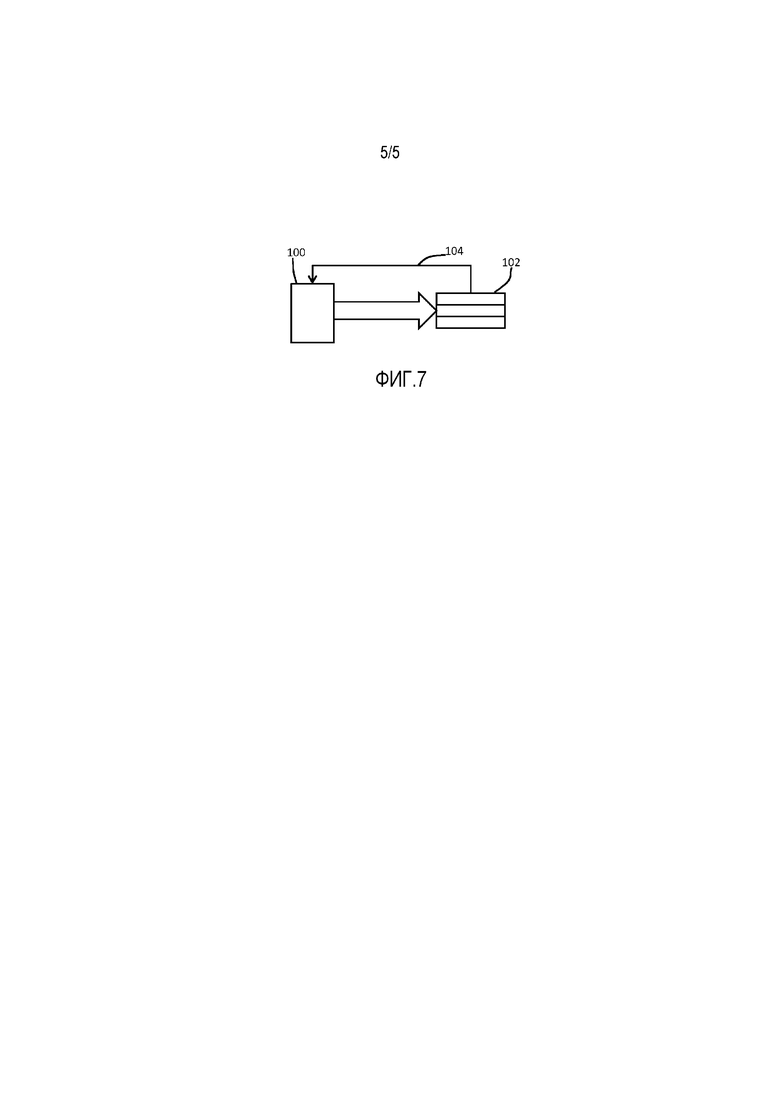
Фиг.7 показывает систему ЭАП-привода, включающую в себя драйвер и необязательную систему обратной связи и активации.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
Изобретение обеспечивает способ возбуждения привода на основе электроактивного полимера (ЭАП-привода) и обеспечивает ЭАП-привод, способный выполнять или выполненный с возможностью выполнять способ. С помощью изобретения используется отрегулированная схема возбуждения для более быстрого изменения привода из одного состояния активации (первого или начального состояния активации) в другое состояние активации (второе или желаемое состояние активации). Способ основан на подаче разновидности сигнала возбуждения, т.е. перевозбуждения, перед подачей окончательного сигнала возбуждения, связанного с 'другим' состоянием активации.
Первое состояние активации может представлять собой состояние покоя (также называемое состоянием без приведения в действие), в то время как желаемое состояние может представлять собой состояние с приведением в действие, или наоборот. Первое состояние активации таким образом может представлять собой состояние с приведением в действие (активацией), в то время как желаемое состояние может представлять собой состояние с еще большим приведением в действие (с большей активацией). Однако, как отмечено, желаемое состояние активации также может представлять собой состояние с меньшим приведением в действие. Изобретение улучшит переключение из одного в другое состояние в любой ситуации. Сигнал временного перевозбуждения улучшит скорость отклика ЭАП-структуры (и таким образом привода), не повреждая ЭАП-структуру, и может сделать это без существенного выброса за пределы активации.
Обычно ЭАП-привод и его ЭАП-структура включают в себя электроды для приема электрического сигнала возбуждения, подаваемого ему драйвером. Драйвер с их помощью управляет приводом. Драйвер обычно включает в себя цепь возбуждения для подачи требуемого электрического сигнала возбуждения на электроды. Электрический сигнал возбуждения может включать в себя или представлять собой сигнал, возбуждаемый напряжением, или сигнал, возбуждаемый током, который требует либо драйвера напряжения, либо драйвера тока.
Когда ЭАП-структура активируется, драйвер подает (или даже генерирует) амплитуду напряжения (переменную, такую как AC, медленно изменяющуюся, квазипостоянную или постоянную, такую как DC) на электроды, приводя с их помощью ЭАП-структуру в состояние желаемой активации (например, позицию привода при активации).
И ЭАП-структуры, и электронные цепи возбуждения не идеальны. С одной стороны, электронная цепь возбуждения всегда имеет внутренние сопротивления. Отклик при активации ЭАП-привода таким образом является не только функцией самой ЭАП-структуры, но также и цепи возбуждения. Чтобы уменьшить воздействие драйвера, рабочее напряжение для ЭАП обычно сохраняется в конденсаторе, параллельном с ЭАП, а с точки зрения активации, это сохраненное напряжение подается с помощью электронного переключателя (например, транзистора, полевого МОП-транзистора) на ЭАП-привод.
С другой стороны, поскольку ЭАП-привод ведет себя как электрическая нагрузка с импедансом для драйвера (драйвера напряжения или тока), после установки драйвером определенного напряжения или тока разность потенциалов, создаваемая между электродами привода, обычно находится не в полной синхронизации с установкой сигнала. Более конкретно и со ссылкой на фиг.3, с точки зрения электротехники, ЭАП-привод (такой, как показан на фиг.1) может быть описан как образующий последовательное соединение резистора Rs и конденсатора C1, оба из которых параллельны с дополнительным резистором Rp. Это так называемый эквивалентный резистивно-емкостной контур 30 (RC-контур), описывающий ЭАП-привод, далее подключен к драйверу 31 через точки 33 и 34. Хотя для описания ЭАП-структуры могут использоваться другие RC-контуры, контур по фиг.3 хорошо описывает ЭАП в первом приближении. ЭАП-структура деформируется в зависимости от электрического поля в конденсаторе и таким образом в зависимости от заряда на этом конденсаторе, который опять же зависит от амплитуды поданного напряжения, приложенного драйвером 31. Если ЭАП деактивируется, поданное напряжение может быть отключено, и соответственно ЭАП будет медленно разряжаться через свое внутреннее параллельное сопротивление RS и наконец вернется к своему начальному состоянию. Однако другие методологии разряда могут быть применены при конкретных обстоятельствах, таких как приложение напряжений других амплитуд, как будет дополнительно описано здесь ниже.
По существу, последовательный RC-контур задает электрическую константу времени  (в секундах), которая является важным параметром, описывающим временное поведение такой конфигурации. Как отмечено, механическое смещение (т.е. движение) ЭАП-привода связано с зарядом Q на конденсаторе C1, который определяется поданным напряжением V1 и самой емкостью (Q=C⋅V). Поскольку емкость конденсатора является «фиксированным» компонентом с фиксированной емкостью, которая зависит от конфигурации и конструкции структуры активации устройства (т.е., хотя емкость несколько варьируется во время возбуждения, она прежде всего определена конфигурацией конструкции и используемым ЭАП), поданное напряжение является доминирующим параметром, описывающим механическую деформацию ЭАП в стационарном состоянии (установившемся режиме работы).
(в секундах), которая является важным параметром, описывающим временное поведение такой конфигурации. Как отмечено, механическое смещение (т.е. движение) ЭАП-привода связано с зарядом Q на конденсаторе C1, который определяется поданным напряжением V1 и самой емкостью (Q=C⋅V). Поскольку емкость конденсатора является «фиксированным» компонентом с фиксированной емкостью, которая зависит от конфигурации и конструкции структуры активации устройства (т.е., хотя емкость несколько варьируется во время возбуждения, она прежде всего определена конфигурацией конструкции и используемым ЭАП), поданное напряжение является доминирующим параметром, описывающим механическую деформацию ЭАП в стационарном состоянии (установившемся режиме работы).
Однако, прежде чем достигнуто стационарное состояние, накопленный на конденсаторе C1 заряд (и таким образом напряжение на конденсаторе), определяет мгновенный уровень активации/смещения. Хотя напряжение V1, поданное драйвером между соединениями 33 и 34, используется для возбуждения ЭАП-структуры (эквивалентная схема), уровень активации или смещения определяется напряжением на конденсаторе C1 между соединениями 33 и 35. Таким образом, важное замечание состоит в том, что после переключения ЭАП-структуры на желаемый уровень активации, механический отклик ЭАП-структуры не выйдет за пределы желаемого уровня активации, если на структуру подано напряжение перевозбуждения V1, при условии, что напряжение на конденсаторе остается ниже напряжения, соответствующего желаемому уровню активации.
Более высокое напряжение перевозбуждения будет иметь предел, поскольку будет существовать напряжение пробоя для устройства даже с разряженной емкостью. Предпочтительно напряжения, подаваемые в изобретении, ниже напряжения пробоя.
Для достижения желаемого уровня активации ЭАП-привода напряжение на конденсаторе и таким образом между узлами 33 и 35 должны достигнуть определенного уровня или амплитуды. Идеально этот уровень или амплитуда напряжения достигаются без какой-либо (заметной) задержки. Однако, из-за последовательного сопротивления Rs будет внесена задержка. Поэтому полный заряд Q, требуемый для желаемой позиции, не создается немедленно на ЭАП-структуре, тем самым ЭАП-структура не начинает непосредственно приводиться к своему окончательному уровню с максимизированной скоростью. Вместо этого оно направляется к менее деформированному конечному состоянию, определяемому мгновенным уровнем заряда, и с под-оптимальной скоростью.
Изобретение обеспечивает подход, посредством которого желаемый уровень заряда на ЭАП создается быстрее, не нарушая достижение фактического уровня активации нежелательным образом (например, с существенным выбросом за пределы). Чтобы ускорить время механического отклика ЭАП-структуры, ею возбуждают в течение определенного времени при более высоком напряжении, чем напряжение нормальной работы (напряжение стационарного состояния), требуемое для достижения желаемой позиции при активации, с тем, чтобы ускорить зарядку конденсатора, и, следовательно, ЭАП направляется к состоянию активации, определенному этим более высоким мгновенным уровнем заряда. Таким образом, он реагирует быстрее, чем при функционировании только при его номинальном рабочем напряжении, необходимом для достижения состояния желаемой активации. Этот подход может использоваться для увеличения уровня активации быстрее, т.е. из состояния покоя или состояния начальной активации в состояние более сильной активации.
Когда предусматриваемая окончательная позиция достигнута или почти достигнута, т.е. когда корректное количество заряда Q, связанное с желаемым смещением, присутствует или почти присутствует на конденсаторе C1 ЭАП, амплитуда напряжения возбуждения может быть изменена (например, уменьшена или увеличена) до напряжения для удержания постоянной позиции ЭАП-привода.
Не углубляясь в теорию, в целом, если на конденсатор подается напряжение V0, зарядное напряжение vc(t) в зависимости времени t представляет собой:
 Уравнение 1.
Уравнение 1.
Константа времени τ задана произведением Rs и C1.
 Уравнение 2.
Уравнение 2.
Таким образом, зарядное напряжение на конденсаторе C1 достигает 63,2% от своей окончательной амплитуды в пределах константы времени τ, а 99,3% после интервала, составляющего 5τ.
В предположении требуемой амплитуды напряжения V0 для достижения определенной позиции ЭАП-привода, и дополнительно в предположении, что на ЭАП-привод подается более высокое напряжение, которое может рассматриваться как напряжение перевозбуждения Vod, для напряжения конденсатора выполняется:
 Уравнение 3.
Уравнение 3.
Наконец, если позиция ЭАП-привода должна быть достигнута в течение заданного времени t, поданное напряжение перевозбуждения может быть вычислено как:
 Уравнение 4.
Уравнение 4.
Аналогичным образом, если известно напряжение перевозбуждения Vod, можно оценить, когда, т.е. насколько быстро, ЭАП-привод достигнет своей требуемой позиции привода:
 Уравнение 5.
Уравнение 5.
Типичный ЭАП-привод, например, содержит между электродами релаксорный сегнетоэлектрический материал или эластомерную систему. Значения эквивалентных компонентов для цепи по фиг.3 могут составлять:
C1=800 нФ
Rs=80 кОм
Rp=10 МОм
Это дает константу времени 0,064 с, так что пятикратная константа времени (для достижения смещения при возбуждении 99,3%) составляет 0,32 с.
Для реализации принципа перевозбуждения по изобретению специалистам в данной области техники будут известны несколько топологий возбуждения. Соответственно в дальнейшем моделировании цепи предполагается идеальный и программируемый источник напряжения.
Как показано выше, требуемое перенапряжение может быть определено, если требуется определенное время отклика ЭАП-структуры.
В следующих примерах активация ЭАП-структуры рассматривается как состояние смещения (состояние желаемой активации), соответствующее напряжению стационарного состояния 250 В. Кроме того, состоянием начальной активации является состояние покоя на уровне 0 В. В ситуации, когда состоянием покоя является состояние не 0 В, тогда напряжение перевозбуждения должно быть добавлено к уровню напряжения начального состояния или вычтено из него, чтобы определить фактическое напряжение, поданное на приводное устройство. Это вызвано тем, что напряжение перевозбуждения связано с шагом амплитуды напряжения в сигнале возбуждения.
Таким образом, например, если должно быть достигнуто время отклика 0,2 с, соответствующее напряжение перевозбуждения может быть вычислено на основе уравнения 4.
В этом случае с ЭАП-структурой, имеющей представленные выше эквивалентные компоненты, в течение интервала времени 0,2 с подается напряжение перевозбуждения (первое напряжение) 261,5 В, после чего поданное напряжение возвращается к напряжению стационарного состояния (второму напряжению) 250 В.
Подаваемые напряжения и напряжения на эффективной емкости ЭАП-структуры показаны на фиг.4, которая показывает кривые 40 и 44 напряжения (например, между узлами 33 и 35 на фиг.3) на конденсаторе C1 (какое напряжение соответствует уровню смещения привода; см. здесь выше), а также напряжения 42 и 46 возбуждения, подаваемые между узлами 33 и 34.
График 40 является традиционным откликом на неизменное напряжение 42 возбуждения (в этом случае являющееся напряжением стационарного состояния 250 В) в последующем увеличении начального шага в нулевое время (с ЭАП-приводом в первоначально разряженном состоянии, соответствующем состоянию покоя или состоянию без приведения в действие). График 44 является откликом на напряжение возбуждения, имеющее более высокое первое напряжение 46, составляющее 261,5 В, в течение первого периода, который в этом примере составляет 0,2 с, после которого уровень напряжения возвращается к значению стационарного состояния 250 В. В то время как обычно конденсатор полностью заряжается после примерно 5τ (= 0,32 с), ЭАП-привод теперь достигает требуемого заряда (и таким образом амплитуды напряжения) после заданных 0,2 с. Это составляет уменьшение времени отклика на 30%.
В одной совокупности примеров изобретение относится к возбуждению привода почти постоянным током (dc). Под этим подразумевается, что привод удерживается на уровне постоянного тока в течение периода, который сопоставим или дольше времени активации. Таким образом, второе напряжение возбуждения поддерживается по меньшей мере так же долго, как первое напряжение возбуждения. Для примера по фиг.4 второе напряжение удерживается по меньшей мере 0,2 с. В этом случае полная продолжительность активации составляет по меньшей мере 0,4 с, что дает максимальную частоту работы 2,5 Гц.
Второе напряжение возбуждения может удерживаться по меньшей мере в два раза дольше, чем первое напряжение возбуждения. В этом случае полная продолжительность активации составляет по меньшей мере 0,6 с, что дает максимальную частоту работы 1,7 Гц.
Таким образом, этот аспект относится к медленной активации с почти постоянным током. Например, максимальная частота работы может составлять ниже 10 Гц, например, ниже 5 Гц, или даже быть неизменным напряжение.
Фиг.4 показывает, что напряжение на конденсаторе C1 (который является эффективной емкостью ЭАП-привода) составляет или ниже второго напряжения 42 возбуждения, пока ЭАП-привод заряжается (во время роста напряжения на графике 40). Таким образом, второе напряжение 42 возбуждения никогда не превышает напряжения на конденсаторе C1, так что нет выброса за пределы механического отклика. Следовательно, может быть достигнуто точное позиционирование привода с более быстрым временем отклика.
Как разъяснено выше, если напряжение перевозбуждения известно (или, например, ограничено максимальным напряжением, применимым ко всему ЭАП-приводу, для предотвращения поломки), момент во времени (tactive), когда ЭАП-привод достигает своей требуемой позиции (т.е. своего соответствующего заряда), также может быть вычислен в соответствии с уравнением 5. Этот момент во времени также может быть описан как зависимость константы времени τ самого ЭАП-привода:
 Уравнение 6.
Уравнение 6.
Соответственно, если известна допустимая амплитуда напряжения перевозбуждения, может быть определен параметр n, когда ЭАП-привод достигает своей требуемой позиции (заряда). Для напряжения перевозбуждения Vod=300 В отклик ЭАП-привода, смоделированный в этих стимуляциях, показан на фиг.5.
Фиг.5 показывает набор различных длительностей для напряжения 46 перевозбуждения и соответствующий график 44 для каждой из них. Графики 44 помечены соответствующими значениями n (n=0; 1,0; 1,5; 1,8; 2,0; 3,0; 5,0). Напряжение перевозбуждения 300 В для соответствующих импульсов напряжения 46 может быть считано с фиг.5 из вертикальных линий, отмечающих конец каждого импульса 46 перевозбуждения. Например, напряжение перевозбуждения должно быть подано в течение 0,115 с, чтобы достигнуть требуемой позиции привода (т.е. достигнуть требуемого заряда и напряжения на эффективном конденсаторе C1). Это соответствует параметру n=1,8, что означает, что позиция ЭАП может быть достигнута быстрее с коэффициентом 0,32/0,115=2,78 по сравнению с тем, когда использовалось бы только напряжение стационарного состояния 250 В.
Как видно из фиг.5, если период времени, в течение которого напряжение перевозбуждения подается на ЭАП-привод, слишком короткое (например, n=1,0 или n=1,5), отклик также может быть ускорен, но он больше не является оптимальным. С другой стороны, если период времени, в течение которого напряжение перевозбуждения подается на ЭАП-привод, является слишком длинным (например, n=3,0 или n=5,0), ЭАП-привод перевозбужден, и он занимает еще больше времени, чем период 5τ, чтобы достигнуть желаемой позиции, поскольку теперь должен быть исправлен выброс за пределы. Отметим, что это механическое перевозбуждение, следовательно, если механический выходной сигнал должен быть точным, это может нарушать работу. Изобретение может предотвратить такое механическое перевозбуждение.
Однако, этот механический выброс за пределы может использоваться с выгодой. Например, если ЭАП-привод используется в качестве вида тактильного пользовательского интерфейса, отклик с небольшим выбросом за пределы может увеличить эффективность взаимодействия, сохраняя относительно плавный профиль интерфейса в стационарном состоянии.
Таким образом, первое напряжение возбуждения может подаваться, пока напряжение на эффективной емкости ЭАП-привода не превышает второе напряжение возбуждения на заданную величину, таким образом, что впоследствии напряжение падает обратно до второго напряжения возбуждения. Такая заданная величина может составлять, например, 50%, 20%, 10%, 5%, 2%, 1%.
В таком случае за (намеренным) выбросом за пределы также может следовать период намеренного более низкого подаваемого напряжения, чтобы уменьшить время от выброса за пределы обратно к желаемому стационарному состоянию после начального намеренного выброса за пределы. Таким образом, например, могло бы иметься увеличенное ощущение тактильного отклика («всплеска движения»), но время отклика сокращается. Более низкое напряжение таким образом может содержать третье напряжение, которое ниже второго напряжения и подается между первым и вторым напряжениями.
Даже в этом случае существует период активации при желаемом конечном напряжении, предпочтительно с продолжительностью, равной или большей, чем продолжительность начального напряжения перевозбуждения. Таким образом, тактильный интерфейс по-прежнему представляет собой низкочастотную работу.
Эта низкочастотная работа (менее 10 Гц, как упомянуто выше) намного ниже по частоте, чем резонансно-частотное поведение устройства. Эта резонансная частота обычно составляет в диапазоне от примерно 40 Гц до примерно 60 Гц для свободно стоящего устройства или для устройства с одним зажатым краем (с типичной длиной примерно 10 мм), но может составлять от 200 Гц до 400 Гц для системы, зажатой на обоих краях. Резонансная частота будет зависеть от конструкции устройства.
Как можно видеть из вышеприведенных исследований, время отклика ЭАП-привода может быть чрезвычайно улучшено путем подачи на ЭАП-привод в течение определенного периода времени более высокого напряжения, чем требуемое для достижения требуемой позиции в стационарном состоянии.
Кроме того, известно, что максимальное прилагаемое напряжение или напряжение пробоя всех полимеров (в том числе ЭАП) зависит от времени. Таким образом, ЭАП-привод может выдерживать более высокое максимальное напряжение в течение короткого периода времени. Следовательно, напряжение перевозбуждения может временно превышать максимальное (долгосрочное) рабочее напряжение ЭАП-устройства без риска преждевременной поломки. В вышеприведенном примере максимальный рабочий уровень или амплитуда напряжения для ЭАП-приводов составляет 250 В, но в течение коротких периодов времени эти ЭАП-приводы могут выдерживать более высокие напряжения (до 350 В в течение периодов времени в диапазоне 10-100 мс).
Здесь выше предположено, что конденсатор C1 имеет постоянную емкость. Однако оказывается, что для многих практических ЭАП-приводов её значение не только варьируется во время переключения, но также отличается для различных состояний привода. Следовательно, при переходе из одного состояния в другое может иметься и обычно имеется (значительное) изменение емкости C1. Это происходит в основном вследствие факторов конструкции привода, которые изменяются с изменением геометрии конденсатора (например, может изменяться толщина диэлектрика конденсатора, который включает в себя ЭАП-слой, и/или может изменяться площадь электродов) и/или с изменением свойств диэлектрического материала конденсатора, таких как диэлектрическая постоянная. Последний эффект, например, наблюдается для сегнетоэлектриков. Изобретение может принять во внимание эти изменения. Один способ заключается в определении напряжения перевозбуждения или скорости переключения на основе наиболее высокой эффективной емкости состояний, между которыми происходит переключение. Часто наиболее активированное состояние нуждается в наиболее высокой амплитуде напряжения и вместе с этим имеет наиболее высокую емкость, связанную с ним. Следовательно, емкость C может быть определена для любого числа уровней напряжения активации (стационарного состояния), чтобы использоваться для любого из вышеупомянутых вычислений.
Значения эквивалентных компонентов, использованные выше, а также для любой практической системы, могут быть определены с использованием способов для измерения импеданса, которые известных в данной области техники. Различные RC-модели, такие как на фиг.3, могут быть приспособлены к результатам таких измерений для определения фактических значений сопротивления и емкости практической системы. Эффективная емкость может являться значением, наблюдаемым в стационарном состоянии, когда прекратилась зарядка, а напряжение подается на значение емкости.
Изобретение может быть применено для переключения привода из состояния более слабой активации (такого как, например, состояние покоя) в состояние более сильной активации или наоборот. Фиг.6А показывает примерную форму 60 сигнала возбуждения для переключения привода из первого состояния активации, связанного с первым напряжением 61, во второе состояние активации, связанное со вторым напряжением 67. Таким образом, сначала привод возбуждают первым напряжением 61, соответствующим состоянию слабой активации. В этом случае напряжение 61 выше, чем 0 В, поскольку 0 В находится на уровне 62, и таким образом первое состояние активации в этом случае не является состоянием покоя. В момент времени 63 начинается период 64 перевозбуждения, и напряжение сигнала возбуждения увеличивается до напряжения перевозбуждения 65 путем изменения напряжения 66, причем это изменение напряжения больше разности между вторым напряжением 67 и первым напряжением 61 (разность, определяемая как напряжение 67 минус напряжение 61). Отметим, что изменение является положительным значением, поскольку разность потенциалов является положительной. В течение периода 64 перевозбуждения напряжение перевозбуждения поддерживается на неизменном уровне, подлежащем уменьшению до второго напряжения 67 в его конце в момент времени 68. Второе напряжение 67 поддерживается неизменным во время периода 64'' удержания.
В ситуации переключения по фиг.6A напряжения были и положительными, и увеличивались для перевозбуждения, когда произошло переключение из состояния более низкого напряжения в состояние более высокого напряжения привода. Однако изобретение работает аналогичным образом для обратной ситуации, когда тот же самый привод переключается из состояния более сильной активации в состояние более слабой активации.
Таким образом, фиг.6B показывает примерную форму 60' сигнала возбуждения для переключения привода по фиг.6А из первого состояния активации, связанного с первым напряжением 61', во второе состояние активации, связанное со вторым напряжением 67'. Таким образом, сначала привод возбуждают первым напряжением 61', соответствующим состоянию сильной активации. В момент времени 63' начинается период 64' перевозбуждения, и напряжение сигнала возбуждения уменьшается до напряжения перевозбуждения 65' путем изменения напряжения 66', причем это изменение напряжения больше разности между вторым напряжением 67' и первым напряжением 61' (разности, определяемой как напряжение 67' минус напряжение 61'). Отметим, что изменение является отрицательным значением, поскольку разность между уровнями напряжения является отрицательной. В течение периода 64' перевозбуждения напряжение перевозбуждения поддерживается на постоянном уровне, подлежащем увеличению до второго напряжения 67' в его конце в момент времени 68'. Напряжение 67' удержания поддерживается неизменным во время периода 64''' удержания.
В крайних случаях напряжение перевозбуждения 65' может даже изменить знак с тем, чтобы было подано отрицательное напряжение, например, прямо до точки, где напряжение на емкости приближается ко второму напряжению.
Вышеприведенные примеры по фиг.4 и 5 основаны на напряжении перевозбуждения с прямоугольной формой импульса, которое может рассматриваться как прямоугольное перенапряжение, наложенное на нормальное напряжение возбуждения. Продолжительность может быть переменной и может быть связана с электрической константой времени, определяемой ЭАП-структурой и/или самим приводом. Амплитуда напряжения перевозбуждения также может быть переменной и даже может превышать максимальную рабочую амплитуду напряжения ЭАП-привода благодаря краткому характеру импульса перевозбуждения.
Возможны непрямоугольные формы сигнала напряжения. Например, напряжение перевозбуждения может уменьшаться по амплитуде или увеличиваться по амплитуде с течением времени. Идеально амплитуда напряжения перевозбуждения будет уменьшена до номинального рабочего напряжения, когда будет достигнута требуемая позиция ЭАП (т.е., если достигнут требуемый уровень заряда для достижения предусмотренной позиции).
Таким образом, например, в период 64 по фиг.6А напряжение перевозбуждения поддерживается на значении 65, дающем прямоугольную форму сигнала. При альтернативной форме сигнала напряжение перевозбуждения изменяется от значения 65 до значения 67 в течение периода 64. Изменение, например, является линейным с формой 69 сигнала и ступенчатым с формой 69' сигнала. Могут использоваться другие формы. Изменение 66 напряжения может произойти с использованием крутого подъема или уменьшения напряжения, которое является или не является линейным. Однако, могут использоваться менее крутые изменения. В то же время изменения могут идти с потерей увеличения максимальной скорости переключения.
Ускоренное поведение, а также переходный отклик ЭАП-устройства (т.е. деформация, которой ЭАП будет подвергаться в течение определенного периода времени) может находиться под влиянием формы напряжения, подаваемого на компонент. Вместо подачи на ЭАП-привод напряжения перевозбуждения с постоянной амплитудой может быть подано напряжение с любой другой линейной или нелинейной формой, т.е. с любой произвольной формой. В частности, могут использоваться формы сигнала, подобные многократным ступенчатым прямоугольным импульсам (с одинаковыми или разными коэффициентами заполнения), экспоненциальным и логарифмическим профилям, или их комбинациям. Это включает в себя ступенчатые линейные и нелинейные формы сигнала напряжения.
В целом, интегральная площадь под кривой напряжения/времени превышает площадь для напряжения в стационарном состоянии, и могут использоваться многие разные формы сигнала.
Для изменения желаемым образом выходного напряжения в зависимости от времени может использоваться электронный драйвер. Это включает в себя управление без обратной связи, например, с использованием справочной таблицы амплитуд напряжения перевозбуждения и продолжительностей интервалов времени. Альтернативно, может использоваться управление с обратной связью, имеющее датчик обратной связи, на основе настроек. Датчики обратной связи могут обеспечивать электрическую, механическую или оптическую обратную связь. Для обеспечения обратной связи может использоваться небольшая камера.
Поскольку механические отклики ЭАП-приводов определяются не только своими электрическими характеристиками (другие задержки и периоды простоя могут быть добавлены к электрической задержке), уровень и форма подаваемого напряжения перевозбуждения могут быть коррелированы и адаптированы к комбинации полной задержки. Альтернативно, чтобы коррелировать механический отклик на электрические характеристики ЭАП-привода может использоваться механическая или оптическая обратная связь.
Фиг.7 показывает драйвер 100, используемый для подачи сигнала возбуждения (снова в этом случае напряжения) на ЭАП-привод 102. Также показана необязательная обратная связь 104 (механическая, оптическая или электрическая), которая может использоваться в изобретении.
Драйвер может включать в себя электронную цепь с традиционной печатной платой (ПП) и дискретными электрическими элементами. Альтернативно, он может представлять собой реализованное на полупроводниках устройство, такое как интегральная схема (ИС), известная в данной области техники. Драйвер может быть выполнен как переключающее устройство, использующее внешний источник питания, и может генерировать из него и/или переключать сигналы мощности на структуру электроактивного полимера. Он также может включать в себя источник энергии, такой как источник напряжения или источник тока. Также может иметься компьютер или центральный процессор (ЦП) для управления электрической цепью драйвера. Сигнал возбуждения обычно подается в виде напряжения на электроды ЭАП-структуры, так что он генерирует разность потенциалов между ними. Опорное напряжение, такое как 0 В, может использоваться для заземления одного из электродов. Компьютер может быть реализован в драйвере, но также может быть подключен удаленно (с использованием стандартных проводных или беспроводных соединений, известных в данной области техники). Может присутствовать программное обеспечение, сохраненное (в памяти компьютера любого известного типа) или выполняемое на компьютере, имеющее код, который обуславливает реализацию драйвером управления. Программное обеспечение может иметь код, чтобы позволить пользователю обеспечивать значения параметров. Программное обеспечение может быть сохранено на считываемом компьютером носителе, таком как электронная память, известная в данной области техники, такая как, например, оперативное запоминающее устройство (ОЗУ) или постоянное запоминающее устройство (ПЗУ), флэш-память, SD-карта и т.д., или магнитная память, такая как, например, накопитель на жестком диске (HDD) и т.п., или оптическая память, такая как компакт-диск (CD), цифровой виртуальный диск (DVD), диск Blu-ray и т.д., или другая. Альтернативно, программное обеспечение может работать или загружаться через сеть связи, такую как сеть 3G или 4G, локальную сеть (LAN), широкомасштабную сеть (WAN), проводные или беспроводные сети, например, известные в данной области техники.
Центральный процессор, включающий в себя память, может быть расположен в подустройстве, отдельном от дополнительного подустройства, которое включает в себя привод и таким образом ЭАП-структуру. Оба подустройства таким образом являются частью устройства в соответствии с изобретением. Также имеются блоки связи, такие как проводные или беспроводные передатчики и/или приемники, расположенные в подустройстве и дополнительном подустройстве, позволяющие центральному процессору осуществлять связь с драйвером, с реализацией тем самым дистанционного управления приводом. Подустройство может представлять собой переносное устройство возбуждения любого вида, специализированное для применения или общего пользования, такое как мобильный телефон, носимое устройство или аналогичное устройство.
Это изобретение, в частности, относится к приведению в действие (активации) ЭАП-приводов, содержащих ЭАП в качестве части ЭАП-структуры. ЭАП-структура таким образом содержит ЭАП-материал. Это материал, который может вызвать деформирование ЭАП-структуры после подачи электрического сигнала на ЭАП-структуру. Таким образом, ЭАП-материал может представлять собой смесь (однородную или разнородную), содержащую или состоящую из одного или более матричных материалов с одним или более ЭАП. Например, это может быть дисперсия ЭАП в дополнительном полимерном матричном материале. Дополнительный матричный полимерный материал может представлять собой сетчатый полимер, который допускает деформацию, вызванную ЭАП, вмешанным или диспергированным в матричной сети. ЭАП-материал может быть диспергирован в ней. Упругие материалы являются примерами таких сетей. Предпочтительно количество ЭАП в таких композитных ЭАП-материалах выбирается из группы, состоящей из: >50 массовых или молярных процентов, >75 массовых или молярных процентов или >90 массовых или молярных процентов. ЭАП-материалы также могут содержать полимеры, которые содержат в своих молекулярных частях ЭАП (или активные группы ЭАП) и части других неактивных полимеров. Могут быть использованы многие электроактивные полимеры, ряд из которых будет описан ниже.
В подклассе возбуждаемых полем ЭАП первым примечательным подклассом возбуждаемых полем ЭАП являются пьезоэлектрические и электрострикционные полимеры. В то время как электромеханические характеристики традиционных пьезоэлектрических полимеров ограничены, прорыв в улучшении этих характеристик привел к полимерам-релаксорам на основе ПВДФ, которые проявляют самопроизвольную электрическую поляризацию (возбуждаемое полем выравнивание). Эти материалы могут быть предварительно деформированы для улучшенных характеристик в направлении деформации (предварительная деформация приводит к лучшему молекулярному выравниванию). Другим подклассом возбуждаемых полем ЭАП является подкласс диэлектрических эластомеров. Тонкая пленка этого материала может быть помещена между гибкими электродами, формируя конденсатор, такой как конденсатор с параллельными пластинами. В случае диэлектрических эластомеров напряжение Максвелла, вызванное приложенным электрическим полем, приводит к механическому напряжению на пленке, вызывая ее сжатие по толщине и расширение по площади. Деформационные характеристики как правило увеличиваются при предварительной деформации эластомера (требуя рамку для поддержания предварительной деформации). Деформации могут быть значительными (10-300%). Для этого класса материалов электроды предпочтительно механически прикрепляют к ЭАП-материалу либо непосредственно, либо с промежуточными слоями материала.
Для первого подкласса материалов обычно используются тонкопленочные металлические электроды, поскольку деформации обычно находятся в умеренном режиме (1-5%), также могут использоваться другие типы электродов, такие как, например, проводящие полимеры, масла, гели или эластомеры на основе углеродной сажи и т.д. Для второго класса материалов обычно тип материалов электрода ограничен сильными деформациями. Таким образом, для диэлектрических материалов с низкими и умеренными деформациями могут рассматриваться металлические электроды и проводящие полимерные электроды, для режима сильной деформации обычно используются масла, гели или эластомеры на основе углеродной сажи.
Первым примечательным подклассом ионных ЭАП являются ионные полимер-металлические композиты (ИПМК). ИПМК состоят из мембраны из набухающего при растворении ионообменного полимера, наслоенной между двумя тонкими электродами на основе металла или углерода, и требуют использования электролита. Типичными материалами электрода являются Pt, Gd, УНТ (углеродные нанотрубки), CP (углеродная бумага), Pd. Типичными электролитами являются водные растворы Li+ и Na+. При приложении поля катионы обычно перемещаются на сторону катода вместе с водой. Это приводит к реорганизации гидрофильных кластеров и к расширению полимера. Деформация в области катода приводит к механическому напряжению в остальной части полимерной матрицы, приводящему к изгибу в сторону анода. Изменение полярности приложенного напряжения инвертирует направление изгиба. Хорошо известны полимерные мембраны Nafion® и Flemion®.
Другим примечательным подклассом ионных полимеров являются сопряженные/проводящие полимеры. Привод на основе сопряженного полимера обычно состоит из электролита, помещенного между двумя слоями сопряженного полимера. Электролит используется для изменения степени окисления. Когда к полимеру через электролит прикладывается потенциал, электроны вводятся в полимер или удаляются из полимера, управляя окислением и восстановлением. Восстановление приводит к сокращению, окисление - к расширению.
В некоторых случаях вводятся тонкопленочные электроды, когда сам полимер не имеет достаточной проводимости (по размеру). Электролит может представлять собой жидкость, гель или твердый материал (т.е. комплекс высокомолекулярных полимеров и солей металлов). Наиболее распространенными сопряженными полимерами являются полипиррол (PPy), полианилин (PANi) и политиофен (PTh).
Привод также может быть сформирован из углеродных нанотрубок (УНТ), подвешенных в электролите. Электролит формирует двойной слой с нанотрубками, давая возможность инжекции зарядов. Эта инжекция заряда в двойной слой рассматривается как первичный механизм в приводах на основе УНТ. УНТ действует как электродный конденсатор с зарядом, инжектированным в УНТ, который затем уравновешивается электрическим двойным слоем, сформированным перемещением электролитов к поверхности УНТ. Изменение заряда на атомах углерода приводит к изменениям длины связи C-C. В результате может наблюдаться расширение и сокращение отдельной УНТ.
Что касается вышеупомянутых материалов и более подробно, таким образом, электроактивные полимеры могут включать, но не ограничены этим, следующие подклассы: пьезоэлектрические полимеры, электромеханические полимеры, сегнетоэлектрические полимеры-релаксоры, электрострикционные полимеры, диэлектрические эластомеры, жидкокристаллические эластомеры, сопряженные полимеры, ионные полимер-металлические композиты, ионные гели и полимерные гели.
Подкласс электрострикционные полимеры включает, но не ограничен этим:
Поливинилиденфторид (ПВДФ), поливинилиденфторид-трифторэтилен (ПВДФ-ТФЭ), поливинилиденфторид-трифторэтилен-хлорфторэтилен (ПВДФ-ТФЭ-ХФЭ), поливинилиденфторид-трифторэтилен-хлортрифторэтилен (ПВДФ-ТФЭ-ХТФЭ), поливинилиденфторид-гексафторпропилен (ПВДФ - ГФП), полиуретаны или их смеси.
Подкласс диэлектрические эластомеры включает, но не ограничен этим:
акрилаты, полиуретаны, силиконы.
Подкласс сопряженные полимеры включает, но не ограничен этим:
полипиррол, поли-3,4-этилендиокситиофен, поли(п-фенилен сульфид), полианилины.
Ионные устройства могут быть основаны на ионных полимер-металлических композитах (ИПМК) или сопряженных полимерах. Ионный полимер-металлический композит (ИПМК) представляет собой синтетический композитный наноматериал, который при приложении напряжения или электрического поля отображает поведение искусственных мышц.
Более конкретно ИПМК состоят из ионного полимера, подобного Nafion или Flemion, на чьи поверхности с помощью химического нанесения покрытия или физически покрыты проводниками, такими как платиновые или золотые электроды или электроды на основе углерода. Под приложенным напряжением перенос и перераспределение ионов вследствие поданного на полоску из ИПМК напряжения приводят к деформации изгиба. Полимер представляет собой мембрану из набухающего при растворении ионообменного полимера. Поле вызывает перемещение катионов на сторону катода вместе с водой. Это приводит к реорганизации гидрофильных кластеров и к расширению полимера. Деформация в области катода приводит к механическому напряжению в остальной части полимерной матрицы, приводя к изгибу в направлении анода. Изменение полярности приложенного напряжения на обратное инвертирует направление изгиба.
Электроды ЭАП-структуры могут иметь много конфигураций, каждая из которых имеет конкретные преимущества и эффекты.
Если нанесенные электроды размещены в несимметричной конфигурации, наложенные сигналы (например, напряжения) могут вызвать все виды деформаций, такие как извивание, свертывание, скручивание, накручивание и несимметричную деформацию изгиба ЭАП-структуры.
Во всех этих примерах для влияния на электрическое и/или механическое поведение слоя ЭАП-материала в ответ на приложенное электрическое поле или ток могут быть обеспечены дополнительные пассивные слои.
Слой ЭАП-материала каждого блока может быть помещен между электродами. Альтернативно, электроды могут находиться на одной и той же стороне ЭАП-материала. В любом случае электроды могут быть физически прикреплены к ЭАП-материалу либо напрямую без каких-либо (пассивных) слоев в промежутке, либо опосредованно с дополнительными (пассивными) слоями в промежутке. Но это не обязательно должно всегда иметь место. Для релаксора или постоянных пьезоэлектрических или сегнетоэлектрических ЭАП непосредственный контакт не является необходимым. В последнем случае электродов вблизи ЭАП достаточно при условии, что электроды могут обеспечить электрическое поле для ЭАП, при этом ЭАП-структура будет иметь свою функцию активации. Для диэлектрических эластомеров деформацию вызывает сформированная электрическим полем механическая сила между электродами. Следовательно, электроды должны быть физически прикреплены к ЭАП либо напрямую, либо опосредованно (например, с помощью слоев между электродами и ЭАП). Электроды могут быть растягиваемыми с тем, чтобы они следовали за деформацией слоя ЭАП-материала. Материалы, подходящие для электродов, также известны и, например, могут быть выбраны из группы, состоящей из тонких металлических пленок, таких как золотые, медные или алюминиевые, или органические проводники, такие как углеродная сажа, углеродные нанотрубки, графен, полианилин (PANI), поли(3,4-этилендиокситиофен) (PEDOT), например, поли(3,4-этилендиокситиофен)поли(стиролсульфонат) (PEDOT:PSS). Также могут использоваться металлизированные пленки из сложного полиэфира, такие как металлизированный полиэтилентерефталат (PET), например, с использованием алюминиевого покрытия.
Таким образом, ЭАП-структура может использоваться для активации (приведения в действие). Альтернативно или дополнительно она может использоваться для считывания (измерения). Наиболее значимые механизмы считывания основаны на измерениях усилия и обнаружении деформации. Диэлектрические эластомеры, например, могут быть легко растянуты внешней силой. При подаче низкого напряжения на датчик может быть измерена деформация в зависимости от электрического напряжения (напряжение является функцией площади). Постоянные электрические напряжения могут быть созданы за счет механической деформации пьезоэлектрического ЭАП. Датчики на основе пьезоэлектрических и электрострикционных полимеров могут генерировать электрический заряд в ответ на приложенное механическое напряжение (если степень кристалличности в пьезоэлектрическом ЭАП достаточно высока для генерирования обнаруживаемого заряда). Сопряженные полимеры могут использовать пьезо-ионный эффект (механическое напряжение приводит к воздействию ионов). При воздействии механического напряжения, УНТ испытывают изменение заряда на поверхности УНТ, который может быть измерен. Было также показано, что сопротивление УНТ изменяется при контакте с газообразными молекулами (например, O2, NO2), делая УНТ применимыми в качестве детекторов газов. Другой способ считывания с помощью возбуждаемых полем систем представляет собой измерение изменения емкости непосредственно или измерение изменений сопротивления электрода в зависимости от деформации.
Изобретение может быть применено во многих системах ЭАП-привода, включая примеры, где интерес представляет матричный массив приводов.
Во многих применениях основная функция изделия основана на (локальной) манипуляции человеческой тканью или активации поверхностей контакта с тканью. В таких применениях ЭАП-приводы, например, предоставляют уникальные преимущества, главным образом благодаря небольшому форм-фактору, гибкости и высокой плотности энергии. Следовательно, они могут быть легко интегрированы в мягкие, трехмерные и/или миниатюрные изделия и интерфейсы. Примерами таких применений являются:
Косметический уход за кожей, например, приборы стимуляции кожи в форме кожных накладок на основе реагирующего на воздействие полимера, которые придают коже постоянное или циклическое растяжение, чтобы натянуть кожу или уменьшить морщины.
Дыхательные устройства с маской для взаимодействия с пациентом, которая имеет активную подушку или уплотнение на основе реагирующего на воздействие полимера, обеспечивающую переменное нормальное давление на кожу, что сокращает или предотвращает красные пятна на лице.
Электрические бритвы с адаптивной бреющей головкой. Высота поверхностей контакта с кожей может регулироваться с использованием приводов из реагирующего на воздействие полимера для влияния на баланс между близостью и раздражением.
Приборы для очистки полости рта, такие как воздушная зубная нить с приводом динамического сопла для улучшения проникновения струи, особенно в промежутках между зубами. Альтернативно, зубные щетки могут быть снабжены активированными пучками.
Устройства бытовой электроники или сенсорные панели, которые обеспечивают локальную тактильную обратную связь через массив преобразователей на основе реагирующего на воздействие полимера, который (массив) интегрирован в пользовательский интерфейс или находится рядом.
Катетеры с направляемым кончиком для упрощения навигации в извилистых кровеносных сосудах.
Другая категория соответствующего применения, которой принесет пользу использование таких приводов, относится к модификации света. Оптические элементы, такие как линзы, отражающие поверхности, дифракционные решетки и т.д., могут быть выполнены адаптивными по форме или с адаптацией позиции с использованием этих приводов. В этом случае одним преимуществом ЭАП является, например, более низкое энергопотребление.
Другие изменения к раскрытым вариантов осуществления могут быть поняты и выполнены специалистами в данной области техники при осуществлении заявленного изобретения на практике на основе изучения чертежей, раскрытия и приложенной формулы изобретения. В формуле изобретения слово «содержит» не исключает другие элементы или этапы, а единственное число не исключает множества. Сам факт, что некоторые меры изложены во взаимно различных зависимых пунктах формулы изобретения, не указывает на то, что не может использоваться с преимуществом комбинация этих мер. Любые ссылочные позиции в формуле изобретения не должны истолковываться как ограничивающие объем.
Подводя итог, привод на основе электроактивного полимера содержит структуру на основе электроактивного полимера и драйвер для подачи сигнала возбуждения активации. В одном аспекте для изменения заряда структуры на основе электроактивного полимера используется первый сигнал возбуждения с напряжением перевозбуждения, необходимым для переключения структуры из одного в другое состояние активации. Когда или после того как активация структуры на основе электроактивного полимера будет находиться близко к или в другом состоянии активации, для приведения и удержания структуры на основе электроактивного полимера в состоянии активации используется напряжение возбуждения. Эта схема временного перевозбуждения улучшает скорость отклика, не повреждая структуру на основе электроактивного полимера.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО АКТУАТОРА НА ОСНОВЕ ЭЛЕКТРОАКТИВНОГО ПОЛИМЕРА | 2016 |
|
RU2723889C2 |
| ДАТЧИКИ НА ОСНОВЕ ЭЛЕКТРОАКТИВНЫХ ПОЛИМЕРОВ И СПОСОБЫ ВОСПРИЯТИЯ | 2016 |
|
RU2723887C2 |
| УСТРОЙСТВО МОЛОКООТСОСА | 2017 |
|
RU2754631C2 |
| ПРИВОДНОЕ И СЕНСОРНОЕ УСТРОЙСТВО НА ОСНОВЕ ЭЛЕКТРОАКТИВНОГО ПОЛИМЕРА | 2016 |
|
RU2721302C2 |
| ПРИВОД НА ОСНОВЕ ЭЛЕКТРОАКТИВНОГО МАТЕРИАЛА И СПОСОБ ВОЗБУЖДЕНИЯ | 2018 |
|
RU2766272C2 |
| УСТРОЙСТВО ПРИВОДА, ИМЕЮЩЕЕ В СВОЕМ СОСТАВЕ ЭЛЕКТРОАКТИВНЫЙ ПОЛИМЕРНЫЙ ПРИВОД, И СПОСОБ УПРАВЛЕНИЯ | 2017 |
|
RU2737791C2 |
| УСТРОЙСТВО АКТЮАЦИИ | 2016 |
|
RU2714307C2 |
| АКТУАТОРНОЕ УСТРОЙСТВО НА ОСНОВЕ ЭЛЕКТРОАКТИВНОГО ПОЛИМЕРА | 2017 |
|
RU2737789C2 |
| ПРИВОДНОЕ УСТРОЙСТВО, СОДЕРЖАЩЕЕ ПРИВОД НА ОСНОВЕ ЭЛЕКТРОАКТИВНОГО ПОЛИМЕРА, И СПОСОБ ВОЗБУЖДЕНИЯ | 2017 |
|
RU2736071C2 |
| АКТУАТОРНОЕ УСТРОЙСТВО НА ОСНОВЕ ЭЛЕКТРОАКТИВНОГО ПОЛИМЕРА | 2016 |
|
RU2728492C2 |
Изобретение относится к приводам на основе электроактивного полимера, а именно к их возбуждению. Сущность: подают сигнал возбуждения на структуру на основе электроактивного полимера для переключения ее из первого состояния активации во второе состояние активации. Сигнал возбуждения содержит период перевозбуждения, в котором напряжение сигнала возбуждения изменяется от первого напряжения до напряжения перевозбуждения на величину, которая превышает разность между вторым напряжением и первым напряжением. После периода перевозбуждения следует период удержания, по меньшей мере, в начале которого напряжение сигнала возбуждения представляет собой второе напряжение. Технический результат: улучшение скорости отклика без повреждения структуры на основе электроактивного полимера. 3 н. и 12 з.п. ф-лы, 7 ил.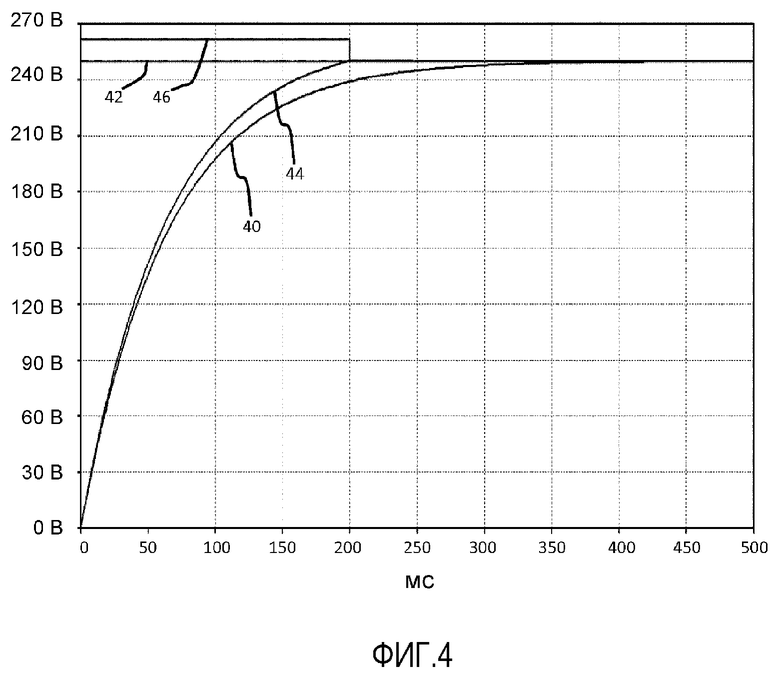
1. Способ возбуждения привода, содержащего структуру на основе электроактивного полимера для принятия по меньшей мере первого состояния активации и второго состояния активации, отличного от первого состояния активации, при этом первое состояние активации имеет связанное с ним первое напряжение, а второе состояние активации имеет связанное с ним второе напряжение;
при этом способ включает:
подачу сигнала возбуждения, имеющего напряжение сигнала возбуждения, на структуру на основе электроактивного полимера для переключения ее из первого состояния активации во второе состояние активации,
при этом сигнал возбуждения содержит:
- период (46) перевозбуждения, в котором напряжение сигнала возбуждения изменяется от первого напряжения до напряжения перевозбуждения на величину, которая превышает разность между вторым напряжением и первым напряжением; и
- после периода перевозбуждения период (42) удержания, по меньшей мере, в начале которого напряжение сигнала возбуждения представляет собой второе напряжение.
2. Способ по п. 1, в котором
второе напряжение подают только когда или после того как структура на основе электроактивного полимера достигнет второго состояния активации впервые во время подачи электрического сигнала возбуждения.
3. Способ по п. 1 или 2, в котором
второе напряжение поддерживают, по меньшей мере, так же долго, как напряжение перевозбуждения, или поддерживают по меньшей мере в два раза дольше, чем напряжение перевозбуждения.
4. Способ по любому из пп. 1-3, в котором
структура на основе электроактивного полимера содержит электроды для приема электрического сигнала возбуждения, определяющие конденсатор, имеющий емкость, и
напряжение перевозбуждения подают, пока напряжение на упомянутой емкости не будет отличаться от второго напряжения на заданную величину, и впоследствии оно изменяется на второе напряжение.
5. Способ по п. 4, в котором заданная величина меньше значения, выбранного из группы, состоящей из 50%, 20%, 10%, 5%, 2%, 1%, 0%.
6. Способ по п. 4 или 5, в котором
напряжение перевозбуждения подают, пока напряжение на упомянутой емкости не будет составлять или быть ниже второго напряжения.
7. Способ по п. 4 или 5, в котором напряжение перевозбуждения подают, пока напряжение на упомянутой емкости не превысит второе напряжение на заданную величину, таким образом, что впоследствии напряжение изменяется обратно на второе напряжение.
8. Способ по любому предыдущему пункту, в котором во время периода перевозбуждения напряжение перевозбуждения
является по существу неизменным или
изменяется от начального значения до второго напряжения.
9. Способ по любому предыдущему пункту, в котором период цикла, содержащего период перевозбуждения и период удержания, больше периода, соответствующего резонансной частоте структуры на основе электроактивного полимера.
10. Считываемый компьютером носитель, содержащий считываемый компьютером код, который при его исполнении на компьютере вызывает выполнение драйвером этапов способов по любому из пп. 1-9.
11. Устройство, содержащее привод, содержащий:
структуру на основе электроактивного полимера для принятия по меньшей мере первого состояния активации и второго состояния активации, отличного от первого состояния активации, при этом первое состояние активации имеет связанное с ним первое напряжение, а второе состояние активации имеет связанное с ним второе напряжение; и
драйвер, предназначенный для подачи сигнала возбуждения, имеющего напряжение сигнала возбуждения, на структуру на основе электроактивного полимера для переключения ее из первого состояния активации во второе состояние активации, при этом сигнал возбуждения содержит:
- период (46) перевозбуждения, в котором напряжение сигнала возбуждения изменяется от первого напряжения до напряжения перевозбуждения на величину, которая превышает разность между вторым напряжением и первым напряжением; и
- после периода перевозбуждения период (42) удержания, по меньшей мере, в начале которого напряжение сигнала возбуждения представляет собой второе напряжение.
12. Устройство по п. 11, в котором привод или структура на основе электроактивного полимера содержит электроды, подключенные к драйверу и предназначенные для подачи сигнала возбуждения на структуру на основе электроактивного полимера.
13. Устройство по п. 11 или 12, при этом устройство содержит память, хранящую справочную таблицу, перечисляющую множество элементов данных действий переключения, причем каждый элемент данных относится к конкретному переключению из первого состояния активации во второе состояние активации, и предоставляющую напряжение и продолжительность перевозбуждения для по меньшей мере одного значения времени отклика переключения, достижимого для этого конкретного переключения.
14. Устройство по п. 11 или 12, дополнительно содержащее систему (104) обратной связи для
определения состояния активации привода и, исходя из определенного состояния активации, установки и/или изменения одного или более из уровня, продолжительности или формы сигнала напряжения перевозбуждения.
15. Устройство по любому из пп. 11-14, дополнительно содержащее считываемый компьютером носитель по п. 10 и микропроцессор.
| ТЕРМОПЛАСТИЧНАЯ ПОВЯЗКА, ОБЛАДАЮЩАЯ ИСКЛЮЧИТЕЛЬНОЙ ДЕФОРМАТИВНОСТЬЮ И ЖЕСТКОСТЬЮ, И СПОСОБ ЕЕ ИЗГОТОВЛЕНИЯ | 2014 |
|
RU2654194C2 |
| KR 1020160020023 A, 23.02.2016 | |||
| KR 1020100032770 A, 26.03.2010 | |||
| EP 995599 B1, 08.02.2006 | |||
| ЭЛЕКТРОАКТИВНЫЙ ПОЛИМЕРНЫЙ АКТЮАТОР | 2011 |
|
RU2568944C2 |

