Область техники, к которой относится изобретение
Изобретение относится к системе обеспечения подвижности человека или экзоскелету, который выполнен, в частности, с возможностью поддерживать пользователя, страдающего дефицитом подвижности.
Уровень техники
Как правило, экзоскелет содержит конструкцию таза, две конструкции ног, две конструкции ступней и две конструкции бедер:
- конструкция таза выполнена с возможностью располагаться сзади крестца пользователя, когда он надевает экзоскелет, и может быть связана с тазом при помощи подвесной системы или лямок,
- каждая конструкция ноги выполнена с возможностью располагаться напротив одной или двух ног (левой или правой в зависимости от конструкции) пользователя и содержит верхний сегмент ноги и нижний сегмент ноги, располагаемые соответственно напротив голени и икры пользователя,
- каждая конструкция ступни содержит опорную плоскость, на которую одна из ступней пользователя (левая или правая в зависимости от конструкции) опирается, когда ступня расположена горизонтально,
- каждая конструкция бедра выполнена с возможностью располагаться напротив одного из бедер (левого или правого в зависимости от конструкции).
Полный контроль экзоскелета требует наличия приводов и конструктивных сочленений для обеспечения движения экзоскелета и, следовательно, перемещения пользователя, на котором надет экзоскелет. Как правило, механические сочленения включают в себя поворотные, кулисные и/или шаровые сочленения, тогда как приводы могут содержать силовые цилиндры, двигатели и т.д.
Эти механические сочленения и приводы выбирают таким образом, чтобы обеспечивать перемещение экзоскелета без риска нанесения травмы пользователю, на котором он надет. Для этого важно, в частности, не прикладывать усилия, не выдерживаемые конечностями пользователя, и необходимо предложить экзоскелет, имеющий одновременно небольшой габарит и умеренный вес.
В документе WO 2011/002306 описана, например, система управления экзоскелетом, надетым на пользователя и содержащим приводы, связанные с различными компонентами экзоскелета, каждый из которых соответствует части тела пользователя. В частности, экзоскелет содержит главный привод ступни и вспомогательный привод ступни, выполненные с возможностью приводить в действие конструкцию ступни и обеспечивать ее адаптацию к профилю земли.
Для этого главный привод ступни выполнен с возможностью приведения во вращение конструкции ступни относительно нижней конструкции ноги при помощи поворотного сочленения вокруг оси, параллельной поворотной оси колена. Вспомогательный привод ступни позволяет конструкции ступни адаптироваться к земле. Однако такая конструкция лодыжки является относительно сложной, габаритной, тяжелой и энергоемкой.
В документе FR 14 52370, поданном 21 марта 2014 года на имя заявителя, предложен также экзоскелет, содержащий конструкцию ноги, конструкцию ступни и поворотное сочленение лодыжки, связывающее конструкцию ступни с конструкцией ноги, при этом поворотное сочленение лодыжки имеет наклонную поворотную ось, то есть поворотную ось, которая не включена ни в одну референтную плоскость среди фронтальной плоскости, сагиттальной плоскости и горизонтальной плоскости экзоскелета. Таким образом, поворотное сочленение лодыжки образует не равный нулю угол между 0° и 30° с опорной плоскостью конструкции ступни и не равный нулю угол между 0° и 45° относительно плоскости, перпендикулярной к медианной продольной оси опорной плоскости. Преимуществом такой конфигурации является обеспечение движений на уровне лодыжки, которые приближаются к естественным движениям человека, при помощи только одного привода, ориентированного, как указано выше. Таким образом, конструкция экзоскелета становится проще и легче. Кроме того, такая конфигурация позволяет уменьшить боковой габарит ноги, что снижает риски коллизий во время движения при ходьбе.
Раскрытие сущности изобретения
Изобретение призвано предложить решение, которое позволяет одновременно улучшить устойчивость экзоскелета во время движения ходьбы и правильно воспроизводить движение ходьбы человека и которое имеет небольшой габарит и умеренный вес.
Для этого изобретением предложен экзоскелет, содержащий:
- конструкцию ступни, содержащую опорную плоскость, выполненную с возможностью опоры на нее ступни пользователя,
- нижнюю конструкцию ноги, выполненную с возможностью размещения в ней нижней части ноги пользователя,
- механическое сочленение колена, выполненное с возможностью соединять нижнюю конструкцию ноги с верхней конструкцией ноги, выполненной с возможностью размещения в ней верхней части ноги пользователя, при этом механическое сочленение колена имеет поворотную ось, и
- механическое сочленение лодыжки, соединяющее конструкцию ступни с нижней конструкцией ноги, при этом механическое сочленение лодыжки содержит первое поворотное сочленение, имеющее первую поворотную ось, при этом указанная первая поворотная ось по существу параллельна поворотной оси механического сочленения колена. Под выражением «по существу параллельна» в данном случае следует понимать, что первая поворотная ось Х1 образует угол, заключенный между 0° и примерно пятнадцатью градусами, с поворотной осью Y, предпочтительно примерно между 6° и 10°, как правило, порядка 8°.
Кроме того, механическое сочленение лодыжки содержит второе поворотное сочленение, имеющее вторую поворотную ось, которая расположена в плоскости, перпендикулярной к первой поворотной оси и образует с опорной плоскостью угол, заключенный между 30° и 60°, когда экзоскелет стоит вертикально и находится в состоянии покоя.
Эта конфигурация обеспечивает плоский контакт между конструкцией ступни экзоскелета и землей во время опорной фазы движения ходьбы и движение ходьбы, близкое к биомеханическому движению человека во время фазы колебания движения ходьбы экзоскелета.
Вышеупомянутый экзоскелет имеет некоторые следующие предпочтительные, но не ограничительные отличительные признаки, рассматриваемые индивидуально или в комбинации:
- вторая поворотная ось образует с опорной плоскостью угол, заключенный между 40° и 50°, когда экзоскелет стоит вертикально и находится в состоянии покоя, предпочтительно угол порядка 45°,
- экзоскелет дополнительно содержит два параллельных привода, закрепленные между конструкцией ступни и нижней конструкцией ноги и выполненные с возможностью контролировать угловое положение конструкции ступни вокруг первой и второй поворотных осей механического сочленения лодыжки,
- параллельные приводы закреплены с двух сторон от нижней конструкции ноги,
- каждый из приводов содержит линейный привод, установленный на нижней конструкции ноги, и тягу, установленную, с одной стороны, на линейном приводе и, с другой стороны, на конструкции ступни при помощи шарового сочленения таким образом, чтобы поступательное перемещение линейного привода приводило к вращению тяги относительно конструкции ступни,
- линейные приводы содержат домкрат, связанный с двигателем, предпочтительно типа шарикового винта или системы винт-гайка,
- домкрат содержит резьбовой шток, приводимый во вращение двигателем, и гайку, неподвижную относительно конструкции ноги, при этом тяга содержит конец, установленный на гайке таким образом, чтобы поступательное перемещение гайки приводило к поступательному перемещению конца тяги,
- каждый привод дополнительно содержит по меньшей мере одну кулису, содержащую направляющую, закрепленную на нижней конструкции ноги, и подвижную каретку, выполненную с возможностью поступательно перемещаться вдоль направляющей, при этом гайка закреплена на каретке кулисы,
- каретка содержит первый ползун и второй ползун, установленные подвижно с возможностью поступательного перемещения по направляющей кулисы и неподвижно соединенные при помощи соединительной детали, при этом гайка и тяга закреплены на соединительной детали каретки,
- механическое сочленение между гайкой и тягой содержит поворотное сочленение, и механическое сочленение между тягой и конструкцией ступни содержит шаровое сочленение,
- механическое сочленение между гайкой и тягой содержит карданный шарнир или два поворотных сочленения с по существу перпендикулярной осью,
- домкрат дополнительно содержит простой механический подшипник, расположенный между выходом двигателя и резьбовым штоком, при этом указанный механический подшипник имеет отклонение от соосности, составляющее от пяти дуговых минут до пятнадцати дуговых минут, как правило, примерно десять дуговых минут,
- первое поворотное сочленение расположено на конструкции ступни таким образом, чтобы приходить в положение напротив медиальной лодыжки и латеральной лодыжки пользователя, оснащенного экзоскелетом, и/или второе поворотное сочленение расположено на конструкции ступни таким образом, чтобы приходить в положение напротив пятки или ахиллова сухожилия пользователя,
- первая поворотная ось и поворотная ось механического сочленения колена образуют угол, заключенный между 0° и пятнадцатью градусами, предпочтительно между 6° и 10°, например, 8°,
- первая поворотная ось расположена в плоскости, параллельной земле, когда экзоскелет стоит вертикально и находится в состоянии покоя,
- экзоскелет дополнительно содержит промежуточную деталь, которая, с одной стороны, установлена на конструкции ступни, будучи свободной во вращении относительно конструкции ступни вокруг второй поворотной оси, и, с другой стороны, установлена с возможностью поворота вокруг первой поворотной оси на нижней конструкции ноги,
- промежуточная деталь установлена на нижней конструкции ноги и на конструкции ступни при помощи пассивных поворотных сочленений,
- экзоскелет дополнительно содержит узел, образующий пружину сжатия, закрепленный, с одной стороны, на промежуточной детали и, с другой стороны, на нижней конструкции ноги,
- образующий пружину узел содержит первый упруго деформирующийся орган, при этом первый орган соединен, с одной стороны, с промежуточной деталью между первым и вторым поворотными сочленениями при помощи крепежного элемента и, с другой стороны, с нижней конструкцией ноги, при этом указанный первый орган выполнен с возможностью действовать усилием натяжения на промежуточную деталь,
- крепежный элемент является гибким,
- образующий пружину узел дополнительно содержит полый корпус по существу удлиненной формы, имеющий первый конец и второй конец, противоположный первому концу, при этом указанный полый корпус установлен в гнезде, выполненном в нижней конструкции ноги, при этом первый конец полого корпуса находится напротив дна гнезда, и первый орган установлен в гнезде и сжат между дном указанного гнезда и вторым концом полого корпуса,
- экзоскелет дополнительно содержит второй упруго деформирующийся орган, расположенный в полом корпусе, при этом второй орган закреплен вблизи первого конца полого корпуса, при этом крепежный элемент взаимодействует с вторым органом таким образом, чтобы второй орган мог натягивать крепежный элемент, и крепежный элемент расположен в полом корпусе и выступает из первого конца указанного полого корпуса и из дна гнезда,
- первый орган и/или второй орган содержит пружину сжатия,
- первый орган и второй орган содержат пружину сжатия, при этом второй орган имеет жесткость, меньшую жесткости первого органа,
- крепежный элемент имеет утолщение, расположенное в полом корпусе, и второй орган содержит блокировочную деталь, выполненную с возможностью образовать упор для утолщения,
- крепежный элемент дополнительно содержит стопорный упор, закрепленный на крепежном элементе, и полый корпус дополнительно содержит выступ, закрепленный на внутренней стенке полого корпуса и выполненный с возможностью взаимодействовать со стопорным упором и образовать препятствие для стопорного упора крепежного элемента,
- полый корпус дополнительно содержит болт, закрепленный вблизи его второго конца, при этом первый орган упирается в указанный болт.
Вторым объектом изобретения является узел, образующий пружину, выполненный с возможностью разгрузки приводов экзоскелета только во время некоторых фаз ходьбы, например, во время фазы начала движения в конце фазы опоры.
Для этого изобретением предложен узел, образующий пружину сжатия, закрепленный, с одной стороны, на первой детали и, с другой стороны, на второй детали, подвижной относительно первой детали, содержащий:
- первый упруго деформирующийся орган, при этом первый орган соединен, с одной стороны, с первой деталью при помощи крепежного элемента и, с другой стороны, с второй деталью, при этом указанный первый орган выполнен с возможностью действовать усилием натяжения на первую деталь, и
- полый корпус по существу удлиненной формы, имеющий первый конец и второй конец, противоположный первому концу, при этом указанный полый корпус установлен в гнезде, неподвижно закрепленном на второй детали, при этом первый конец полого корпуса находится напротив дна гнезда, и первый орган установлен в гнезде и сжат между дном указанного гнезда и вторым концом полого корпуса.
Вышеупомянутый узел имеет некоторые следующие предпочтительные, но не ограничительные отличительные признаки, рассматриваемые индивидуально или в комбинации:
- крепежный элемент является гибким,
- крепежный элемент является тросиком,
- образующий пружину узел дополнительно содержит второй упруго деформирующийся орган, расположенный в полом корпусе, при этом второй орган закреплен вблизи первого конца полого корпуса, при этом крепежный элемент взаимодействует с вторым органом таким образом, чтобы второй орган мог натягивать крепежный элемент, и крепежный элемент расположен в полом корпусе и выступает из первого конца указанного полого корпуса и из дна гнезда,
- гнездо выполнено во второй детали,
- первый орган и/или второй орган содержит пружину сжатия,
- первый орган и второй орган содержат пружину сжатия, при этом второй орган имеет жесткость, меньшую жесткости первого органа,
- крепежный элемент имеет утолщение, расположенное в полом корпусе, и второй орган содержит блокировочную деталь, выполненную с возможностью образовать упор для утолщения,
- крепежный элемент дополнительно содержит стопорный упор, закрепленный на крепежном элементе, и полый корпус дополнительно содержит выступ, закрепленный на внутренней стенке полого корпуса и выполненный с возможностью взаимодействовать со стопорным упором и образовать препятствие для стопорного упора крепежного элемента,
- полый корпус дополнительно содержит болт, закрепленный вблизи его второго конца, при этом первый орган упирается в указанный болт.
Краткое описание чертежей
Другие отличительные признаки, задачи и преимущества изобретения будут более очевидны из нижеследующего подробного описания со ссылками на прилагаемые чертежи, которые иллюстрируют не ограничительные примеры осуществления и на которых:
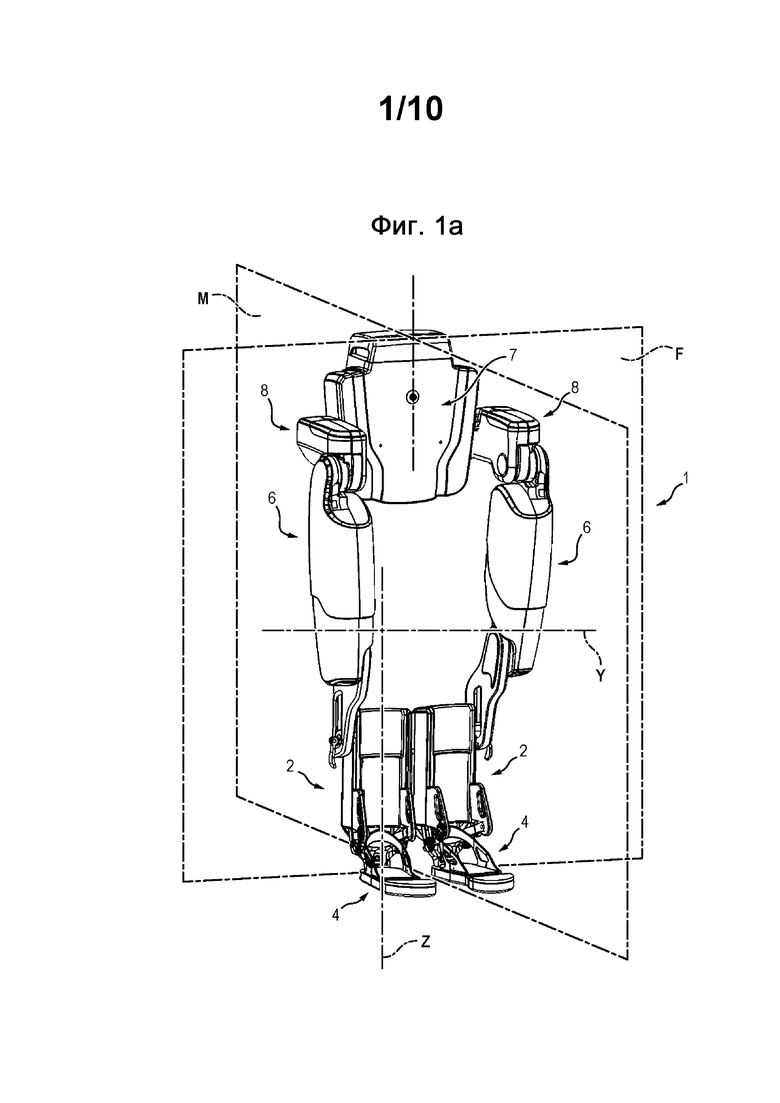
На фиг. 1а показан пример выполнения заявленного экзоскелета, вид в перспективе;
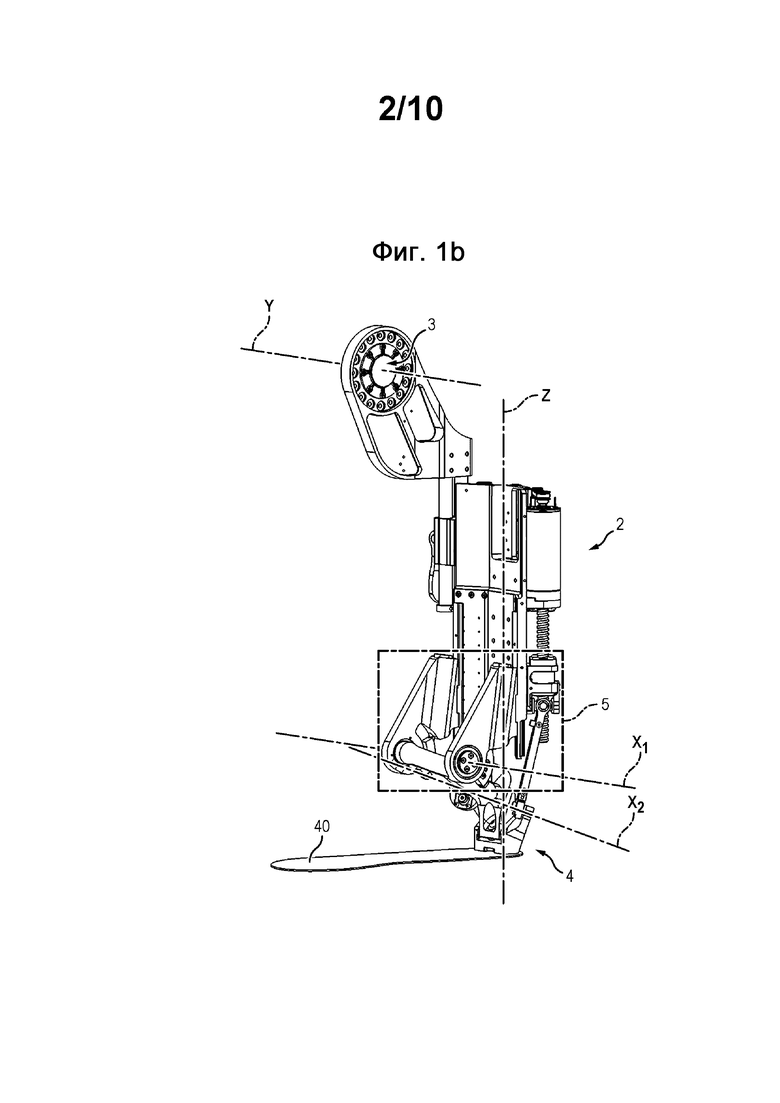
на фиг. 1b детально показаны конструкция ступни и нижняя конструкции ноги экзоскелета, изображенного на фиг. 1а.
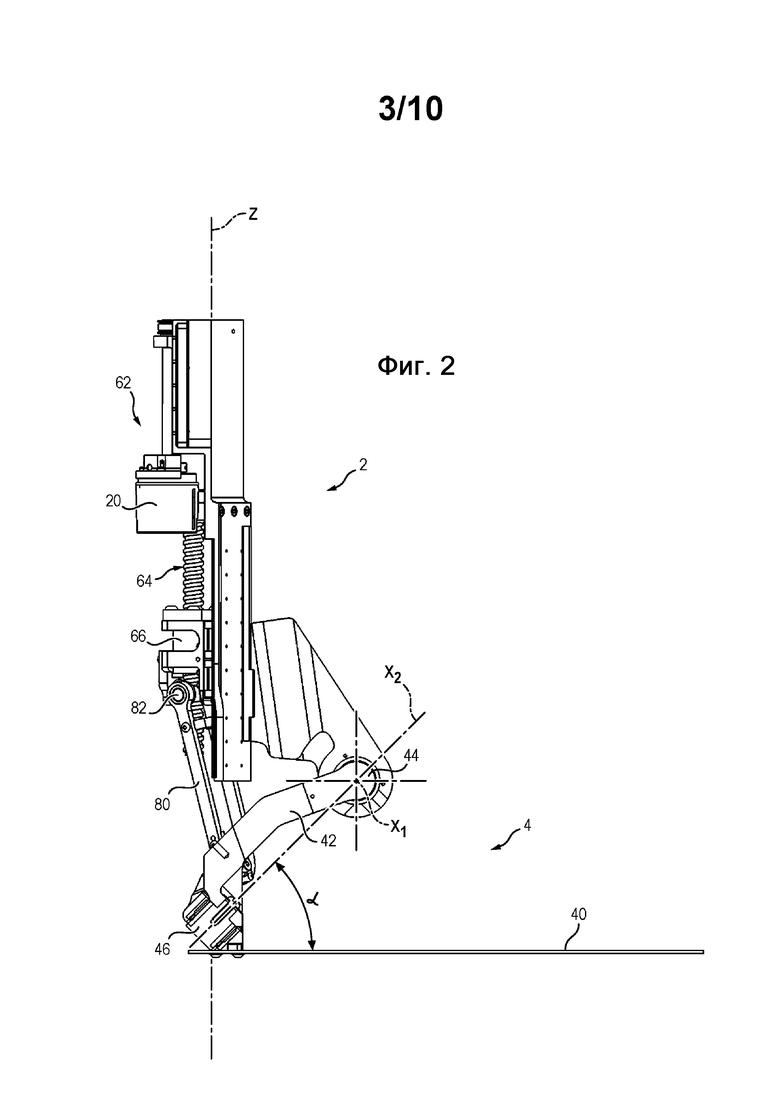
на фиг. 2 показан первый пример выполнения конструкций ступни и нижней конструкции ноги в соответствии с изобретением, вид сбоку и в разрезе;
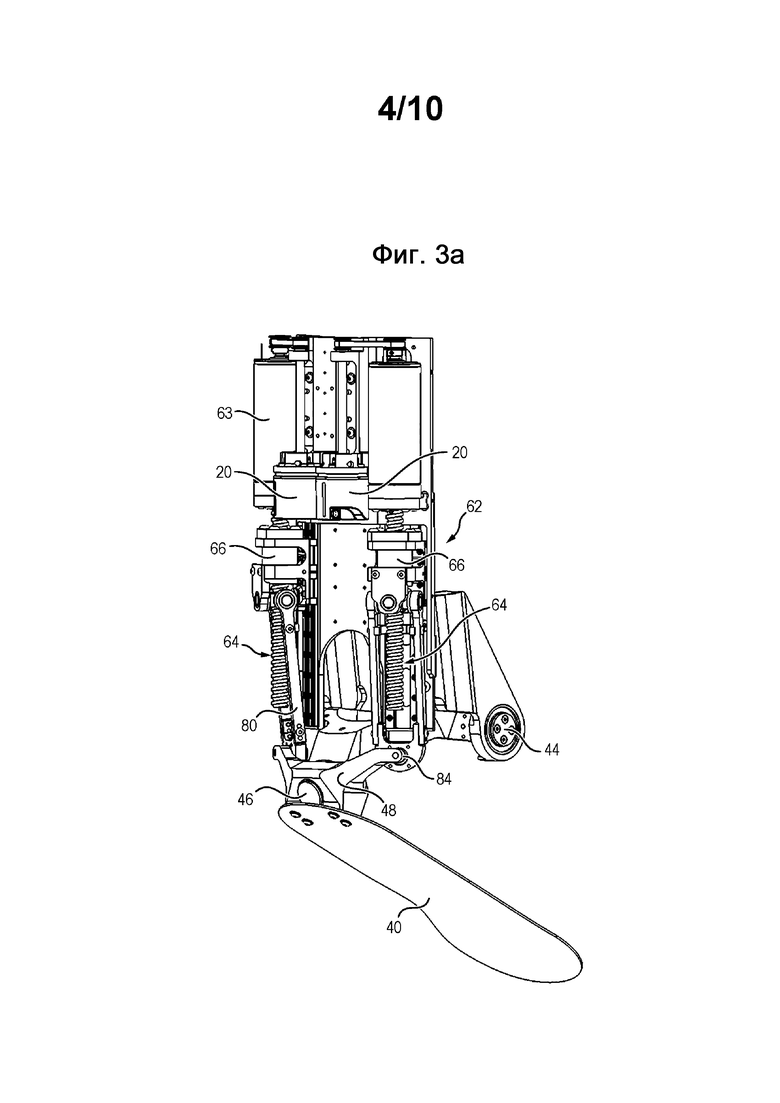
на фиг. 3а показаны конструкции, изображенные на фиг. 2, при этом конструкция ступни вытянута, вид сзади в три четверти;
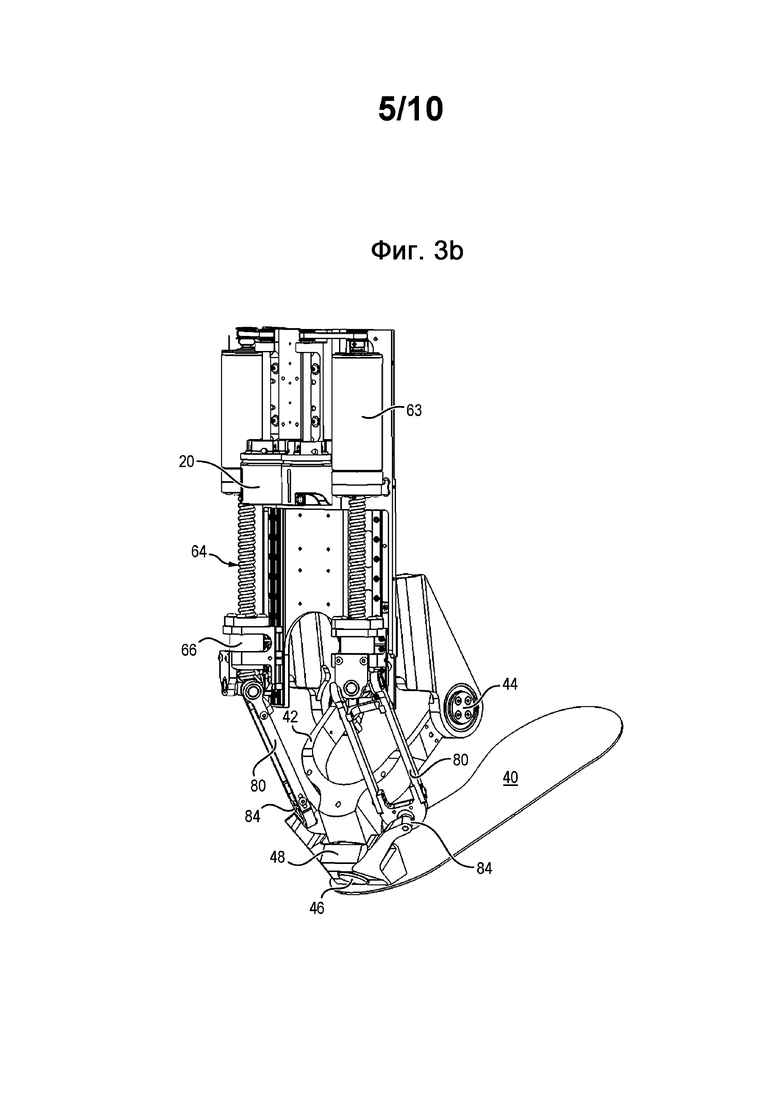
на фиг. 3b показаны конструкции, изображенные на фиг. 2, при этом конструкция ступни согнута, вид сзади в три четверти;
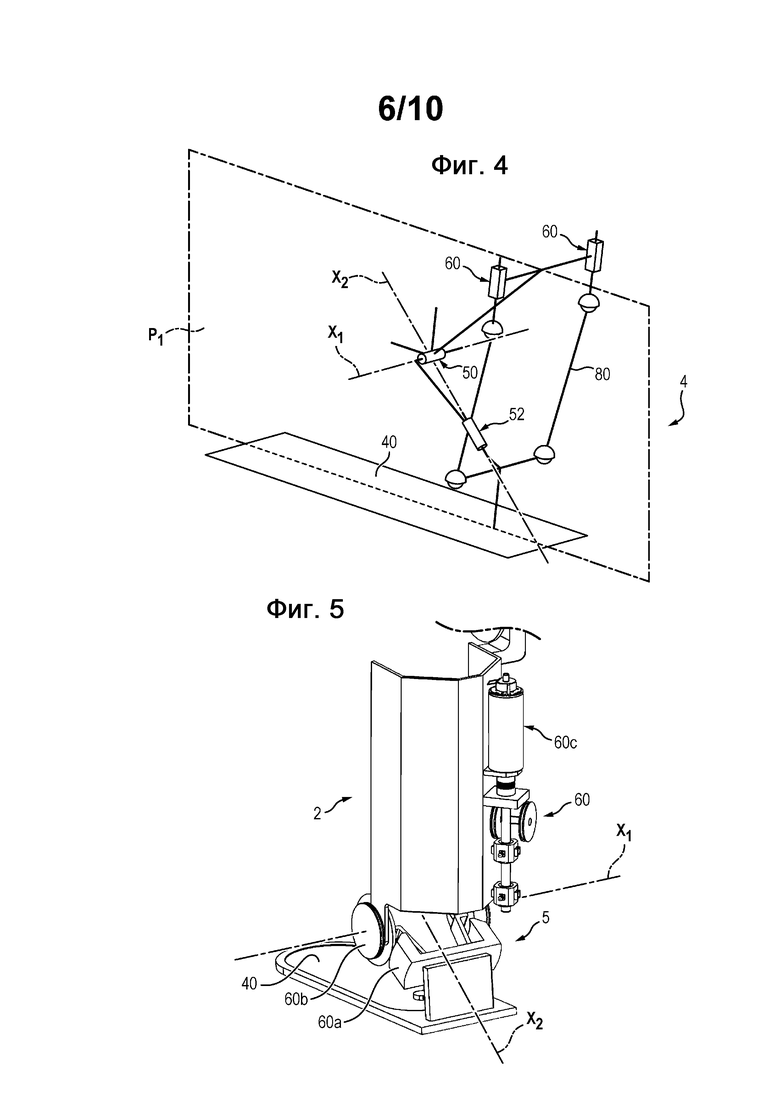
на фиг. 4 показана кинематическая схема конструкций, показанных на фиг. 2;
на фиг. 5 показан второй пример выполнения конструкции ступни и нижней конструкции ноги, где показан только один привод, упрощенный вид сзади в три четверти;
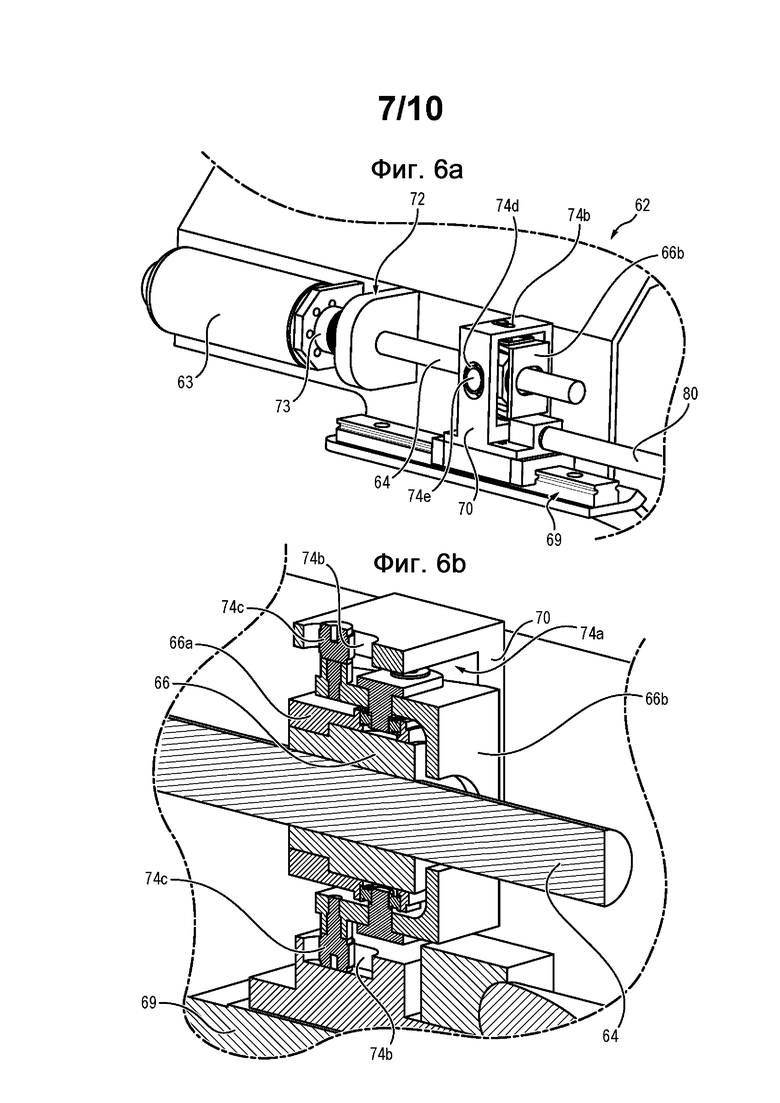
на фиг. 6а показан первый вариант выполнения привода, который можно использовать для конструкций, показанных на фиг. 2, вид в перспективе;
на фиг. 6b показана часть привода, изображенного на фиг. 6а, вид в разрезе;
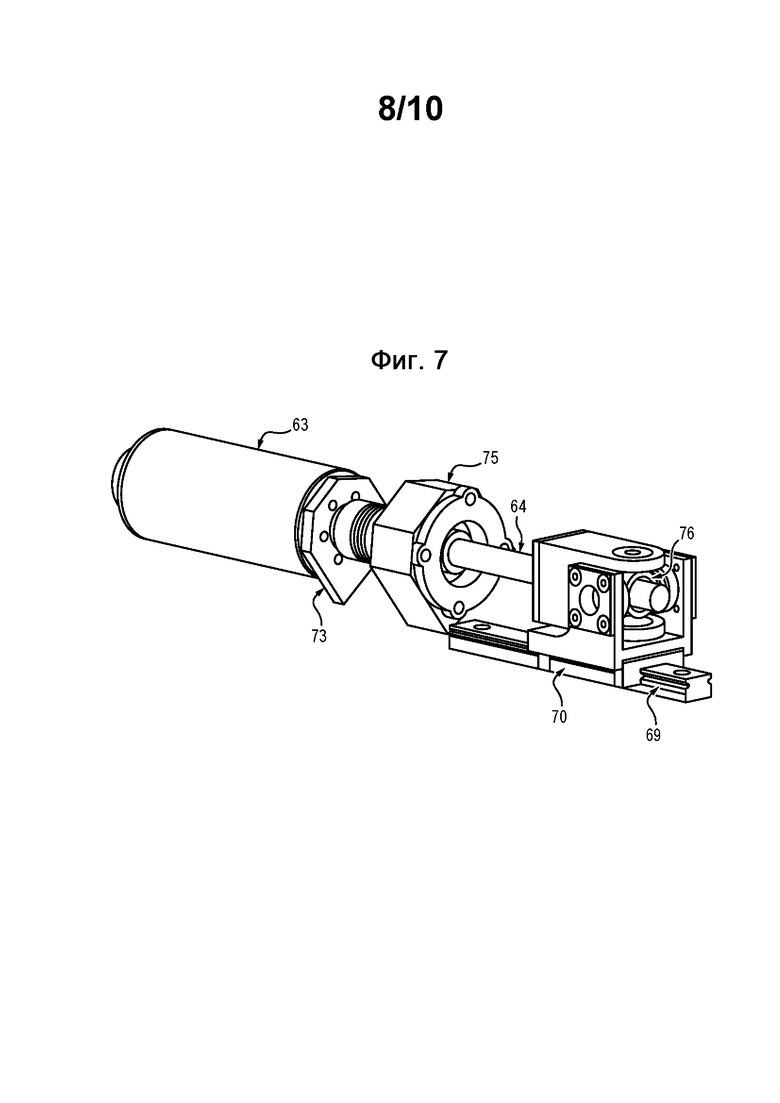
на фиг. 7 показан второй вариант выполнения привода, который можно использовать для конструкций, показанных на фиг. 2, вид в перспективе;
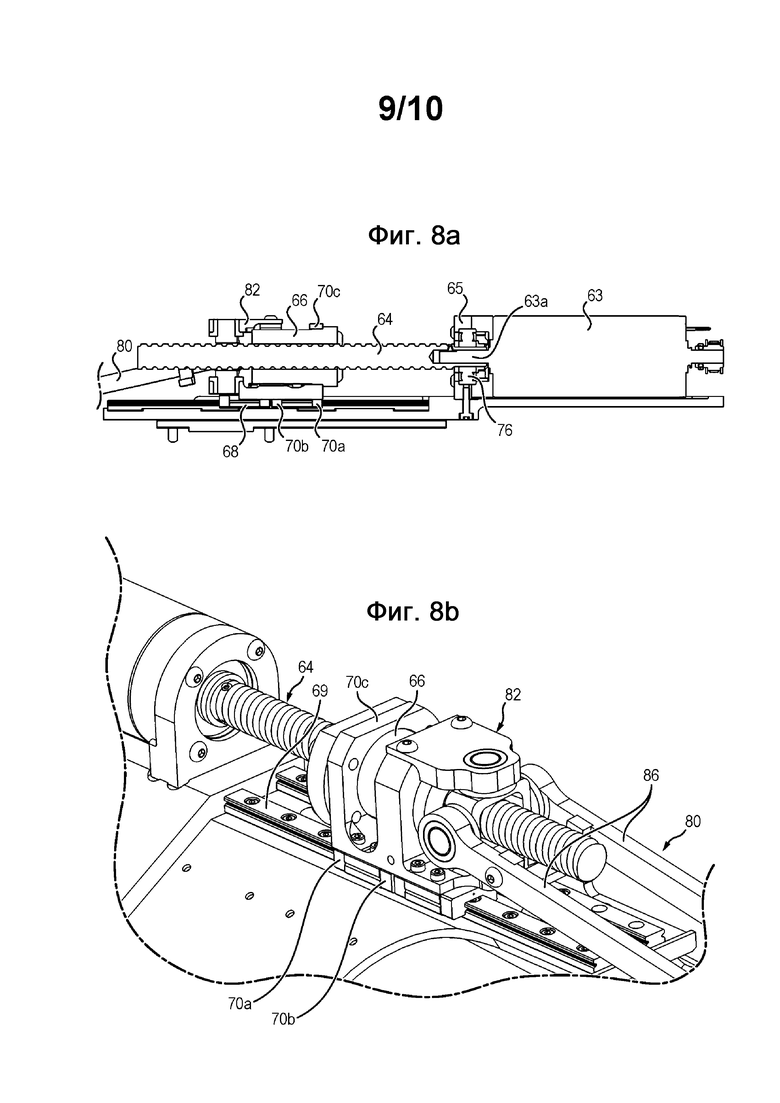
на фиг. 8а показан третий вариант выполнения привода, который можно использовать для конструкций, изображенный на фиг. 2, вид в разрезе;
на фиг. 8b показан вид в перспективе привода, изображенного на фиг. 8а;
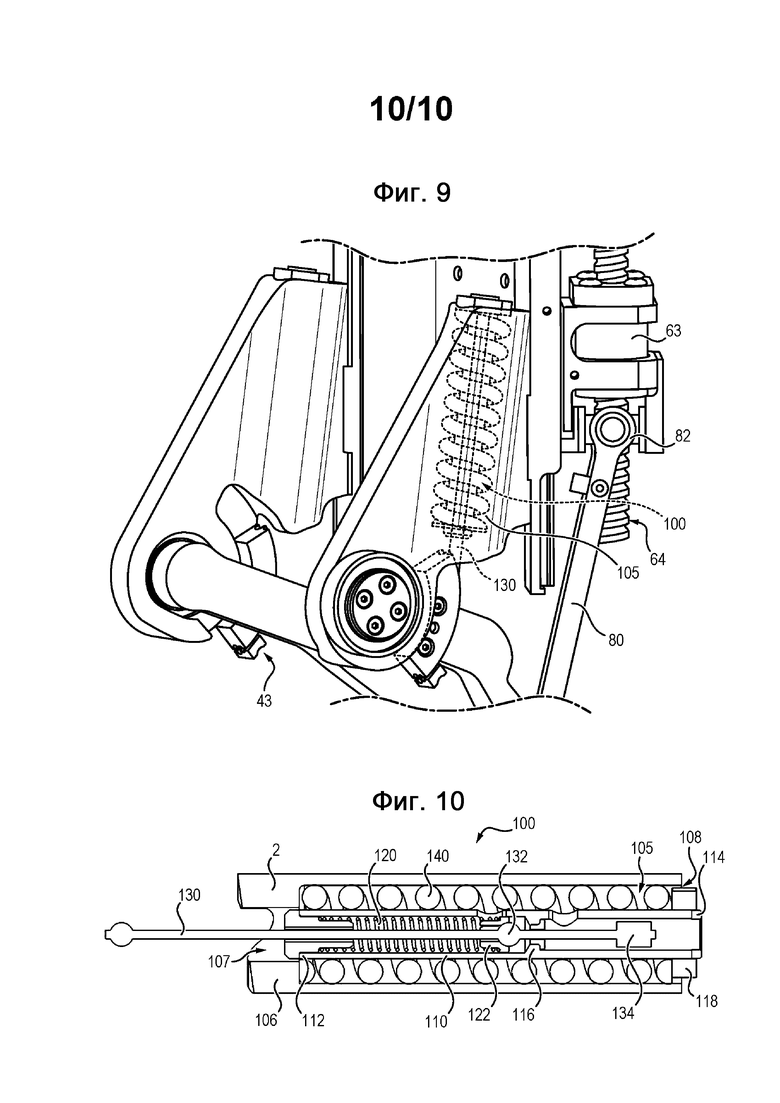
на фиг. 9 - деталь фиг. 1b с показом примера осуществления образующего пружину узла;
на фиг. 10 показан образующий пружину узел, изображенный на фиг. 9, вид в разрезе.
Осуществление изобретения
Экзоскелет 1 согласно изобретению содержит:
- конструкцию 4 ступни, содержащую опорную плоскость 40, выполненную с возможностью опоры на нее ступни пользователя,
- нижнюю конструкцию 2 ноги и верхнюю конструкцию 6 ноги, выполненные с возможностью размещения в них соответственно нижней части и верхней части ноги пользователя,
- механическое сочленение 3 колена, соединяющее нижнюю конструкцию 2 ноги с верхней конструкцией 6 ноги, и
- механическое сочленение 5 лодыжки, соединяющее конструкцию 4 ступни с нижней конструкцией 2 ноги.
Факультативно, экзоскелет 1 может также содержать:
- конструкцию 7 таза, которая выполнена с возможностью располагаться сзади крестца пользователя, когда на него надет экзоскелет 1, и которая может быть связана с тазом при помощи подвесной системы или лямок, и
- конструкцию 8 бедра, выполненную с возможностью располагаться напротив одного из бедер пользователя, например, сзади или сбоку. В данном случае конструкция 8 бедра расположена сбоку относительно соответствующего бедра пользователя.
Предпочтительно экзоскелет 1 является симметричным относительно медианной плоскости М экзоскелета 1 и содержит конструкцию 4 правой ступни и конструкцию 4 левой ступни, конструкцию правой ноги и конструкцию левой ноги, механическое сочленение 3 правого колена и механическое сочленение 3 левого колена, конструкцию правого бедра и конструкцию левого бедра и т.д.
Под медианной плоскостью М экзоскелета 1 в данном случае следует понимать воображаемую плоскость, которая делит экзоскелет 1 на левую половину и правую половину. Эта плоскость М известна также под названием медианного сагиттального сечения.
Экзоскелет 1 содержит также фронтальную плоскость F, которая является воображаемой плоскостью, перпендикулярной к медианной плоскости М и делящей экзоскелет 1 на переднюю часть и заднюю часть.
В дальнейшем для упрощения описания будет описана только одна из половин экзоскелета 1. Разумеется, это описание можно применять, с учетом изменений, к левой половине экзоскелета 1, поскольку она является симметричной с его правой половиной относительно медианной плоскости М экзоскелета 1.
Как известно, механическое сочленение 3 колена может иметь поворотную ось Y, что позволяет пользователю, оснащенному экзоскелетом 1, сгибать колено, в частности, во время движения ходьбы. Для этого механическое сочленение 3 колена может, например, содержать поворотное сочленение, ось которого соответствует поворотной оси Y колена. В варианте осуществления механическое сочленение колена имеет только одну степень свободы, а именно вращение вокруг поворотной оси Y.
Поворотная ось Y колена в основном проходит перпендикулярно к направлению ходьбы экзоскелета 1 по существу в горизонтальной плоскости.
Что касается механического сочленения 5 лодыжки, то оно содержит первое поворотное сочленение 50, имеющее первую поворотную ось Х1, и второе поворотное сочленение 52, имеющее вторую поворотную ось Х2. В варианте осуществления механическое сочленение 5 лодыжки имеет только эти две степени свободы. Действительно, заявитель заметил, что механическое сочленение лодыжки с тремя степенями свободы значительно увеличивает вес и габарит механического сочленения и что двух степеней свободы достаточно для воспроизведения ходьбы человека и для адаптации к профилю земли.
Первая поворотная ось Х1 по существу параллельна поворотной оси Y механического сочленения 3 колена, что позволяет пользователю сгибать и вытягивать свою ступню в конструкции 4 ступни. Это движение соответствует, например, движению, выполняемому ступней во время движения ходьбы в направлении, по существу перпендикулярном к фронтальной плоскости F экзоскелета 1.
Выражение «по существу параллельна» в данном случае значит, что первая поворотная ось Х1 образует с поворотной осью Y угол, заключенный между 0° и примерно пятнадцатью градусами. В частности, узел нижней конструкции 2 ноги имеет вертикальную плоскость Р1, которая делит нижнюю конструкцию ноги на две равные части - внутреннюю и наружную; эта плоскость Р1 образует угол, заключенный между нулем градусов и пятнадцатью градусами, с медианной плоскостью М экзоскелета 1 и, следовательно, с направлением ходьбы, поэтому конструкции 4 ступней экзоскелета 1 слегка расходятся, когда экзоскелет 1 стоит вертикально и находится в состоянии покоя. При этом первая поворотная ось Х1 является перпендикулярной к этой плоскости Р1. Например, первая поворотная ось Х1 может образовать с поворотной осью Y угол, заключенный между 6° и 10°, как правило, равный 8°.
Иначе говоря, если предположить, что нижняя конструкция 2 ноги проходит вдоль главного направления, определяющего продольную ось Z, то первая поворотная ось Х1 заключена в плоскости, по существу перпендикулярной к этой продольной оси, и расположена по существу перпендикулярно к направлению ходьбы экзоскелета 1 и перпендикулярно к плоскости Р1.
Можно отметить, что на практике продольная ось Z нижней конструкции 2 ноги образует угол, заключенный между 90 и 95°, с опорной плоскостью 40 конструкции 4 ступни и, следовательно, с землей, когда экзоскелет 1 стоит вертикально и находится в состоянии покоя. Следовательно, первая поворотная ось Х1 заключена в плоскости, по существу параллельной земле, когда экзоскелет 1 стоит вертикально и находится в состоянии покоя.
Предпочтительно первая поворотная ось Х1 проходит на уровне медиальной лодыжки и латеральной лодыжки оснащенного экзоскелетом 1 пользователя.
Вторая поворотная ось Х2 расположена в плоскости, перпендикулярной к первой поворотной оси Х1, и образует с опорной плоскостью 40 угол α, заключенный между 30° и 60°, когда экзоскелет 1 стоит вертикально и находится в состоянии покоя. Эта вторая поворотная ось Х2 по существу соответствует оси Хенке лодыжки человека и позволяет конструкции 4 ступни экзоскелета 1 осуществлять движения инверсии и эверсии. В частности, когда плоскость Р1 и медианная плоскость не совпадают, вторая поворотная ось Х2 соответствует проекции оси Хенке в плоскости Р1.
Предпочтительно, вторая поворотная ось Х2 образует с опорной плоскостью 40 угол α, заключенный между 40° и 50°, когда экзоскелет 1 расположен стоит вертикально и находится в состоянии покоя, предпочтительно угол порядка 45°. Действительно, эти угловые значения позволяют улучшить эргономию экзоскелета 1, поскольку в большей степени приближаются к реальному углу проекции оси Хенке пользователя, оснащенного экзоскелетом 1, в плоскости Р1. Таким образом, экзоскелет 1 является более устойчивым, и снижаются риски травматизма пользователя, который страдает дефицитом моторики и, следовательно, не может контролировать движения части своего тела в экзоскелете 1.
Чтобы управлять движениями конструкции 4 ступни по отношению к нижней конструкции 2 ноги, экзоскелет 1 может, в частности, содержать два параллельных привода 60, закрепленных между конструкцией 4 ступни и нижней конструкцией 2 ноги и выполненных с возможностью контролировать угловое положение конструкции 4 ступни вокруг первой и второй поворотной оси Х2 механического сочленения 5 лодыжки. В частности, параллельные приводы 60 могут быть расположены с двух сторон от нижней конструкции 2 ноги и конструкции 4 ступни.
В данном случае параллельные приводы 60 расположены напротив медиальной части и латеральной части лодыжки пользователя, оснащенного экзоскелетом 1.
Применение двух параллельных приводов 60 позволяет сосредоточить мощность нескольких двигателей на одном приводном движении. Такая мощность имеет значение, когда в короткий промежуток времени необходимо получить большой момент сил, например, чтобы предупредить падение экзоскелета 1 и его пользователя. Кроме того, приводы 60 являются неподвижными относительно нижней конструкции 2 ноги, что позволяет уменьшить движущуюся массу относительно нижней конструкции ноги и, следовательно, ее инерцию.
В первом варианте осуществления, схематично представленном на фиг. 5, параллельные приводы 60 могут, в частности, содержать две зубчатых передачи 60, предпочтительно с параллельными осями. В этом варианте осуществления каждая из зубчатых передач 60 может, в частности, содержать:
- входной орган 60а зацепления, установленный на нижней конструкции 2 ноги и коаксиальный с первой поворотной осью Х1. Входной орган 60а зацепления может представлять собой коническую шестерню или зубчатое колесо с прямыми, геликоидальными или шевронными зубьями,
- выходной орган 60b зацепления, установленный на конструкции 4 ступни и имеющий ось вращения, параллельную первой поворотной оси Х1, и ось вращения относительно второй поворотной оси Х2. Выходной орган 60b зацепления может представлять собой коническую шестерню или зубчатое колесо с прямыми, геликоидальными или шевронными зубьями.
Чтобы уменьшить габарит приводов 60, предпочтительно входной орган 60а зацепления содержит зубчатое колесо, тогда как выходной орган 60b может содержать зубчатый сектор.
Предпочтительно зубчатые передачи расположены напротив медиальной лодыжки и латеральной лодыжки ступни пользователя, оснащенного экзоскелетом 1.
Кроме того, каждая зубчатая передача 60 может приводиться во вращение специальным двигателем 60с. Как правило, двигатели 60с закреплены на нижней конструкции 2 ноги и могут быть расположены напротив лодыжки пользователя, когда на нем надет экзоскелет 1.
Чтобы ограничить боковой габарит приводов 60, предпочтительно двигатели вынесены относительно зубчатых передач 60 и приводят во вращение их соответствующий входной орган 60а зацепления при помощи приводной системы типа шкив-ремень.
Кроме того, между каждым двигателем 60с и соответствующим входным органом 60а зацепления можно предусмотреть редукторные механизмы. Предпочтительно редукторные механизмы установлены между двигателями 60с и трансмиссионными механизмами, чтобы уменьшить габарит каждого привода 60.
Во втором варианте осуществления параллельные приводы 60 могут содержать, каждый, линейный привод 62 и тягу 80. Для этого линейный привод 62 может быть установлен неподвижно, в частности, на нижней конструкции 2 ноги, тогда как тяга 80 может быть установлена, с одной стороны, на линейном приводе 62 при помощи механического сочленения 82 и, с другой стороны, на конструкции 4 ступни при помощи шарового сочленения 84 таким образом, что поступательное перемещение линейного привода 62 приводит к вращению тяги 80 относительно конструкции 4 ступни.
Этот вариант осуществления является конструктивно простым, имеет ограниченный вес и небольшой габарит. Кроме того, передача движений от приводов 60 происходит напрямую, благодаря тягам 80, которые могут выдерживать усилия, действующие со стороны двигателя, и реакцию конструкции 4 ступни, не требуя при этом большого габарита.
Каждый линейный привод 62 может содержать домкрат 62, приводимый в действие соответствующим двигателем 63.
В частности, домкрат 62 может представлять собой систему 66 типа винт-гайка или шариковый винт и содержать для этого резьбовой шток 64, приводимый во вращение двигателем 63, и гайку 66, неподвижную относительно нижней конструкции 2 ноги. Кроме того, преимуществом шарикового винта является его реверсивность и хороший КПД.
В этом случае каждый из домкратов 62 может быть связан с кодирующим устройством 20, предпочтительно закрепленным параллельно с двигателями 63, чтобы уменьшить их габарит. В этом случае передачу вращения от вала двигателя 63 на соответствующее кодирующее устройство 20 можно осуществлять при помощи системы типа шкив-ремень, чтобы сохранить КПД двигателя 63 и одновременно свести к минимуму зазор и шум в механизме и выдерживать высокие скорости вращения.
Тяга 80 может быть установлена на гайке 66 таким образом, чтобы поступательное перемещение гайки 66 приводило к поступательному перемещению конца тяги 80, который закреплен на гайке 66 при помощи механического сочленения 82.
Чтобы избежать действия поперечных усилий на резьбовой шток 64 домкрата 62, который может быть заблокирован и даже может быть поврежден, гайку 66 можно установить на кулисе 68, закрепленной на нижней конструкции 2 ноги.
В частности, кулиса 68 может содержать направляющую 69, закрепленную на нижней конструкции 2 ноги, и подвижную каретку 70, поступательно перемещающуюся вдоль направляющей 69. В этом случае гайка 66 закреплена на каретке 70, и вращение резьбового штока 64 относительно гайки 66 приводит к поступательному перемещению гайки 66 и каретки 70 вдоль направляющей 69 кулисы 68. Следует отметить, что гайка 66 и каретка 70 могут совершать разные движения, в частности, в случае, когда гайка 66 не утоплена в каретку 70. Это относится, в частности, к примеру осуществления, представленному на фиг. 6b.
Чтобы компенсировать возможные погрешности позиционирования между двигателем 63 и резьбовым штоком 64, между резьбовым штоком 64 и гайкой 66 и/или между гайкой 66 и кулисой 68, которые могли бы привести к повреждению домкрата 62, приводы 60 дополнительно содержат средства компенсации этих потенциальных погрешностей.
Для этого, согласно первому варианту осуществления, представленному на фиг. 6а и 6b, привод 60 может содержать жесткий подшипник 72, закрепленный между выходным валом 63а двигателя 63 и резьбовым штоком 64, в комбинации с гибкими средствами 73 соединения резьбового штока 64 с выходным валом 63а двигателя 63. Такой жесткий подшипник 72 воспринимает усилия, которые не мог бы самостоятельно выдержать подшипник двигателя 63, и обеспечивает направление вращения резьбового штока 64.
В этом варианте осуществления гайка 66 может быть закреплена на каретке 70 через механическое сочленение 74, выполненное с возможностью блокировать вращение и поступательное перемещение гайки 66 вдоль главной оси резьбового штока 64 относительно каретки 70.
Например, каретка 70 может содержать стенки, образующие камеру 74а, выполненную с возможностью размещения в ней гайки 66 и прохождения через нее резьбового штока 64. В одной из стенок камеры 74а может быть выполнено первое отверстие 74b для размещения выступающего штифта 74с блокировки вращения гайки 66. Предпочтительно в расположенных друг против друга стенках камеры 74а выполнены два отверстия 74b, связанные с двумя штифтами 74с блокировки вращения гайки 66, чтобы улучшить блокировку вращения гайки 66. В варианте осуществления оба отверстия 74b и оба блокировочных штифта 74с симметрично распределены относительно оси резьбового штока 64, чтобы не создавать паразитного усилия на этом резьбовом штоке 64.
В случае необходимости, эти два отверстия 74b могут также участвовать в передаче поступательного движения гайки 66 на каретку 70. В варианте в стенках камеры 74а можно выполнить два гнезда 74d, в каждом из которых можно установить выступающий ролик 74е гайки 66, чтобы приводить каретку 70 в поступательное движение относительно направляющей 69. В этом варианте осуществления отверстия 74b, в которые заходят блокировочные штифты 74с, могут иметь вытянутую форму, при этом большая ось отверстий 74b совмещена с осью резьбового штока 64, чтобы образовать зазор со стенками камеры 74а и компенсировать возможные отклонения от соосности, которые могут заблокировать поступательное перемещение гайки 66 относительно резьбового штока 64. В варианте осуществления оба гнезда 74d и оба ролика 74е симметрично распределены относительно оси резьбового штока 64, чтобы не создавать паразитного усилия на этом резьбовом штоке 64.
На фиг. 6а и 6b представлен пример осуществления такого механического сочленения. В этом примере осуществления камера 74а имеет по существу прямоугольную форму и содержит нижнюю стенку напротив направляющей 69, верхнюю стенку, противоположную нижней стенке, и две боковые стенки, которые соединяют нижнюю стенку и верхнюю стенку. Два отверстия 74b, которые в данном случае имеют форму вытянутой щели, выполнены соответственно в нижней стенке и верхней стенке камеры 74а каретки 70. Кроме того, в боковых стенках камеры 74а выполнены гнезда 74d, которые тоже имеют вытянутую форму.
Кроме того, механическое сочленение 74 содержит втулку 66а, установленную и неподвижно закрепленную на гайке 66, например, путем запрессовки, и вспомогательную каретку 66b, установленную с возможностью поворота на втулке 66а. Вспомогательная каретка 66b, втулка 66а и гайка 66 установлены в камере 74а каретки 70.
Вспомогательная каретка 66b содержит два выступающих противоположных штифта 74с блокировки вращения, выполненные с возможностью захождения в отверстия 74b, выполненные в верхней и нижней стенках камеры 74а каретки 70, чтобы блокировать вращение вспомогательной каретки 66b относительно каретки 70 во время вращения резьбового штока 64. Ось поворота вспомогательной каретки 66b относительно втулки 66а является по существу параллельной с осью, соединяющей блокировочные штифты 74с.
Кроме того, втулка 66а оснащена роликами 74е, выполненными с возможностью захождения в гнезда 74d каретки 70 и приведения каретки 70 кулисы 68 в поступательное движение.
Согласно второму варианту осуществления, представленному на фиг. 7, привод 69 содержит шаровое сочленение 75, расположенное между выходным валом 63а двигателя 63 и резьбовым штоком 64 и связанное с механическим сочленением 76, выполненным с возможностью блокировки вращения гайки 66 относительно резьбового штока 64 и обеспечения поступательного перемещения гайки 66 относительно нижней конструкции 2 ноги и, следовательно, направляющей 69.
В частности, механическое сочленение 76 может содержать карданный шарнир.
Шаровое сочленение 75 может содержать шаровой подшипник на шариках или роликах, например, шаровой подшипник типа 2600-2RS. Действительно, шаровой подшипник 75 обеспечивает относительное движение колец, в которых находятся элементы качения, и обеспечивают, таким образом, изостатическое направление резьбового штока 64, несмотря на наличие погрешностей соосности между резьбовым штоком 64 и направляющей 69.
Можно также предусмотреть гибкие средства 73 соединения резьбового штока 64 с выходным валом 63а двигателя 63, чтобы компенсировать возможные отклонения от соосности резьбового штока 64 и выходного вала 63а двигателя 63.
Предпочтительно домкрат 62 представляет собой шариковый винт, содержащий шарикоподшипники, а не вкладыши, чтобы уменьшить усилия, связанные с перемещением скольжения.
Этот второй вариант осуществления отличается меньшим габаритом и меньшей сложностью по сравнению с первым вариантом осуществления и позволяет уменьшить паразитные усилия, которые могут действовать на гайку 66 по причине трения на уровне линейного контакта между роликами 74е и кареткой 70 из первого варианта осуществления.
Согласно третьему варианту осуществления, представленному на фиг. 8а и 8b, привод 60 содержит простой механический подшипник 76, установленный между выходным валом 63а двигателя 63 и резьбовым штоком 64, тогда как гайка 66 закреплена на каретке 70 кулисы 68, например, посредством завинчивания или сварки.
Под простым механическим подшипником 76 следует понимать механическое сочленение типа поворотной связи, содержащее два коаксиальных кольца, между которыми расположены элементы качения, такие как шарики, ролики, вкладыши и т.д., и которые удерживаются на расстоянии друг от друга через сепаратор. Механический подшипник 76, который можно применять в приводе 60 согласно этому варианту осуществления, содержит, например, подшипник типа 629-ZZ.
Предпочтительно механический подшипник 76 имеет отклонение от соосности, составляющее от пяти дуговых минут до пятнадцати дуговых минут, как правило, около десяти дуговых минут, чтобы компенсировать дефекты соосности между резьбовым штоком 64 и гнездом подшипника 76, например, в детали 65. Действительно, заявитель установил, что такого механического подшипника 76, который является менее сложным, менее габаритным и менее дорогим, чем шаровой подшипник 75, достаточно, чтобы избегать любого повреждения привода 60 из-за производственных дефектов деталей и, в частности, из-за отклонения от соосности между резьбовым штоком 64 и выходным валом 63а двигателя 63. Действительно, можно допустить отклонение от соосности между резьбовым штоком 64 и выходным валом 63а двигателя 63, оставляя произвольный зазор между выходным валом 63а и отверстием резьбового штока 64, в которое вставляют выходной вал. При этом передача вращения между валом 63а и резьбовым штоком 64 может происходить за счет препятствия, допускающего отклонение от соосности, например, при помощи шпонки в пазу. Этот механический подшипник 76 позволяет отказаться от использования гибких средств соединения между выходным валом 63а и резьбовым штоком 64, в частности, благодаря небольшому отклонению от соосности, которое допустимо между осью выходного вала 63а и осью резьбового штока 64. Наконец, в отличие от второго варианта осуществления, который предусматривает расположение шарового подшипника 75 на расстоянии от гибких средств 73 соединения и, следовательно, является более габаритным вдоль оси резьбового штока 64, механический подшипник 76 можно установить непосредственно на уровне выходного вала 63а двигателя 63.
Например, механический подшипник 76 может содержать шарикоподшипник с отклонением от соосности около десяти дуговых минут, такой как шарикоподшипник 629-ZZ.
По сравнению с вторым вариантом осуществления выполнение гайки 66, утопленной в каретке 70 кулисы 68, позволяет значительно ограничить радиальный габарит привода 60 на уровне гайки 66 и конструктивно упростить привод 60 за счет ограничения количества необходимых деталей. Кроме того, крепление гайки 66 на кулисе 68 при помощи карданного шарнира создает большое расстояние между гайкой 66 и кулисой 68, что может привести к появлению большого плеча рычага: таким образом, замена этого карданного вала 76 утопленным соединением позволяет уменьшить усилия, которыми резьбовой шток 64 действует на кулису 68.
Замена карданного вала 76 на утопленное соединение стала возможной, благодаря отклонениям от соосности, допустимым для подшипника 76, и за счет возможного контроля производственных дефектов механических деталей.
Чтобы уменьшить паразитные усилия и, в частности, поперечные усилия, которые могут передаваться через гайку 66 и кулису 68 на резьбовой шток 64, и ограничить риски блокировки привода 60, каретка 70 может содержать по меньшей мере два подвижных ползуна 70а, 70b, которые установлены с возможностью поступательного перемещения по направляющей 69 кулисы 68 и на которых неподвижно закреплена соединительная деталь 70с. Например, каретка 70 может содержать две пары ползунов 70а, 70b, и кулиса может содержать две пары направляющих 69, при этом каждая пара ползунов 70а, 70b установлена на соответствующей направляющей 69 кулисы 68.
В этом случае гайку 66 можно установить утопленной на соединительной детали 70с на уровне первого ползуна 70а, тогда как тягу 80 можно установить на соединительной детали 70с на уровне второго ползуна 70b. Таким образом, поперечные усилия, которыми действует тяга 80 на привод 60, не передаются напрямую на резьбовой шток 64, а частично воспринимаются двумя ползунами 70а, 70b каретки 70, которые амортизируют их, одновременно обеспечивая перемещение соединительной детали 70с и, следовательно, передачу движений от гайки 66 в направлении тяги 80.
В версии этого варианта осуществления гайку 66 можно закрепить на кулисе 68 при помощи поворотного сочленения вместо утопленного соединения. Действительно, такая конфигурация уже сама по себе позволяет уменьшить радиальное расстояние между резьбовым штоком 64 и кулисой 68. Вместе с тем, заявитель заметил, что требования с точки зрения точности по существу являются одинаковыми, когда механическое сочленение является поворотным сочленением или утопленным соединением: таким образом, более предпочтительным является утопленное соединение, в частности, если поперечные усилия частично воспринимаются кареткой 70, оснащенной двумя ползунами 70а, 70b.
Наконец, чтобы еще лучше противостоять паразитным усилиям, которые могут действовать на резьбовой шток 64, в частности, со стороны тяги 80, можно увеличить диаметр резьбового штока 64 по сравнению с диаметром резьбовых штоков в двух первых вариантах осуществления, что позволяет отказаться от чисто изостатических решений. Так, диаметр резьбового штока может, например, быть 10 мм в двух первых вариантах осуществления, тогда как в третьем варианте осуществления он может составлять 12 мм.
Следует отметить, что такое увеличение диаметра резьбового штока 64 вовсе не приводит к увеличению габарита привода 60. Естественно, увеличение диаметра резьбового штока 64 приводит к увеличению шага штока 64 и, следовательно, хода гайки 66 при одинаковом двигателе 63. Вместе с тем, применение простого механического подшипника 76 вместо гибких средств 73 соединения и шарового подшипника 75 позволяет уменьшить осевую длину привода 60 за счет уменьшения необходимого пространства между выходным валом 63а двигателя 63 и резьбовым штоком 64.
Независимо от варианта осуществления, тягу 80 можно закрепить на гайке 66 при помощи механического сочленения 82, которое может содержать одно поворотное сочленение, два поворотных сочленения с по существу перпендикулярными осями, шаровое сочленение 84 или шаровое сочленение с пальцем, такое как карданный шарнир.
В представленном на фигурах примере осуществления тяга 80 закреплена, например, на второй части каретки 70 при помощи карданного шарнира 82. Действительно, этот вариант осуществления позволяет совместить центр механического сочленения между тягой 80 и домкратом 62 с осью резьбового штока 64 и уменьшить, таким образом, моменты сил, которыми механизм действует на кулису 68.
Кроме того, тягу 80 можно закрепить на конструкции 4 ступни при помощи шарового сочленения 84. Из соображений габарита и передачи усилий от приводов 60 на конструкцию 4 ступни предпочтительно тягу 80 крепят в задней зоне конструкции 4 ступни, например, в зоне конструкции 4 ступни, которая должна располагаться напротив пятки пользователя, на котором надет экзоскелет 1.
Наконец, тяга 80 может содержать два плеча 86, жестко соединенные между собой на уровне механического сочленения с домкратом 62 и шарового сочленения с конструкцией 4 ступни. Действительно, этот вариант осуществления позволяет тяге 80 следовать движению гайки 66 во время ее поступательного перемещения в направлении двигателя 63 без риска вхождения в контакт с резьбовым штоком 64, который в этом случае можно расположить между двумя плечами тяги 80. Кроме того, присутствие двух плеч обеспечивает лучшее восприятие усилий натяжения и сжатия, прикладываемых к тяге 80.
В частности, конструкция 4 ступни может содержать подвижную промежуточную деталь 42, установленную с возможностью вращения при помощи пассивных поворотных сочленений 44, 46 на конструкции 4 ступни и на нижней конструкции 2 ноги, чтобы конструкция лодыжки могла поворачиваться вокруг двух поворотных осей под управлением параллельных приводов 60.
В частности, промежуточная деталь 42 может быть установлена подвижно с возможностью вращения вокруг первой поворотной оси Х1 на нижней конструкции 2 ноги и вокруг второй поворотной оси Х2 на конструкции 4 ступни, благодаря пассивным поворотным сочленениям 44, 46.
В частности, пассивное поворотное сочленение 44 вокруг первой поворотной оси Х1 может содержать подшипники с коническими элементами качения в виде О или в виде Х, центрованные по первой поворотной оси Х1 и расположенные с двух сторон от конструкции 4 ступни. Такие подшипники в виде О или в виде Х имеют небольшой боковой габарит и не создают, таким образом, неудобства для пользователя во время ходьбы, рискуя войти в контакт с препятствиями. Например, можно применить два подшипника типа 61904-ZZ.
Таким образом, это первое пассивное поворотное сочленение 44 позволяет приводам 60 поворачивать конструкцию 4 ступни вокруг второй поворотной оси Х2 без риска блокировки конструкции на уровне первой поворотной оси Х1.
Предпочтительно пассивное поворотное сочленение 46 вокруг второй поворотной оси Х2 содержит единственный подшипник, поскольку установка двух подшипников с двух сторон от второй поворотной оси Х2 создавала бы неудобство для ступни пользователя, оснащенного экзоскелетом 1. Это второе пассивное поворотное сочленение 46 может, например, содержать комбинированный игольчатый подшипник с шариковым упором типа NKIB.
Таким образом, приведение в действие одного и/или другого из приводов 60, в частности, в случае домкрата 62, связанного с тягой 80, приводит к вращению конструкции 4 ступни без риска блокировки.
В данном случае конструкция 4 ступни содержит крепежную деталь 48, закрепленную на конструкции 4 ступни и поддерживающую пассивное поворотное сочленение 46 вокруг второй поворотной оси Х2, при этом промежуточная деталь 42 установлена с возможностью вращения на крепежной детали 48 вокруг второй поворотной оси Х2. В примере осуществления, представленном на фигурах, тяги 80 закреплены на этой крепежной детали 48 через шаровые сочленения 84 с двух сторон от пассивного поворотного сочленения 46. Такая конфигурация позволяет легко крепить тяги 80 на конструкции 4 ступни в зоне, смежной с пятой пользователя, не создавая при этом помех для введения ступни пользователя в конструкцию 4 ступни.
Для обеспечения установки промежуточной детали 42 с возможностью вращения вокруг первой поворотной оси Х1, которая проходит на уровне лодыжек пользователя, который носит на себе экзоскелет 1, промежуточная деталь 42 может иметь сечение в виде U, чтобы огибать лодыжку пользователя, когда его ступня находится в конструкции 4 ступни и одновременно позволять пассивным поворотным сочленениям 44, 46 промежуточной детали 42 располагаться напротив его лодыжек. Разумеется, понятно, что промежуточная деталь 42 может быть выполнена моноблочно или, в варианте, может содержать несколько элементов, соединенных таким образом, чтобы образовать единую деталь.
Далее следует описание примера работы экзоскелета 1 в случае, когда приводы 60 содержат домкрат 62 типа шарикового винта или системы 66 винт-гайка и тягу 80. Оба домкрата 62 являются идентичными и, следовательно, содержат резьбовые штоки 64 одинаковой длины и с одинаковым шагом, одинаковый двигатель 63 и идентичные тяги 80. Резьбовые штоки 64 могут приводиться во вращение против часовой стрелки или по часовой стрелке.
Когда оба резьбовых штока 64 приводятся в движение одинаково и одновременно, чтобы поступательно перемещать гайку 66 в направлении свободного конца штоков 64, конец тяг 80, закрепленный на гайке 66, перемещается в направлении конструкции 4 ступни. При этом противоположный конец тяг 80 действует усилием на конструкцию 4 ступни, которое стремится повернуть конструкцию 4 ступни только вокруг первой поворотной оси Х1. Таким образом, это движение позволяет согнуть ступню пользователя, оснащенного экзоскелетом 1.
Когда оба резьбовых штока 64 приводятся в движение одинаково и одновременно в противоположном направлении вращения, чтобы поступательно переместить гайку 66 в направлении двигателя 63, конец тяг 80, закрепленный на гайке 66, перемещается в направлении, противоположном к конструкции 4 ступни, в сторону механического сочленения 3 колена. При этом противоположный конец тяг 80 действует усилием на конструкцию 4 ступни, которое стремится повернуть конструкцию 4 ступни только вокруг первой поворотной оси Х1 в противоположном направлении, что позволяет вытянуть ступню пользователя.
Когда оба резьбовых штока 64 приводятся в движение по-разному, например, один в направлении против часовой стрелки, а другой - по часовой стрелке, одна из тяг 80 перемещается в направлении конструкции 4 ступни, тогда как другая из тяг 80 перемещается в противоположном направлении, что позволяет повернуть конструкцию 4 ступни вокруг второй поворотной оси Х2 и, следовательно, осуществлять движения инверсии и эверсии в направлении вращения каждого резьбового штока 64. Разумеется, ход двух гаек 66 может быть идентичным или разным, чтобы лучше регулировать ориентацию ступни и, в случае необходимости, обеспечивать вращение конструкции 4 ступни вокруг первой и/или второй поворотной оси Х1, Х2.
Таким образом, управление конструкцией 4 ступни можно осуществлять очень точно в зависимости от направления вращения и от хода каждого резьбового штока 64.
Экзоскелет 1 может также содержать систему 100, выполненную с возможностью разгрузки двигателей 60с, 63 приводов 60, чтобы обеспечивать импульс, необходимый для отрыва ступни в конце фазы опоры. Действительно, в конце фазы опоры необходимо создать большой момент вокруг поворотной оси Х1, чтобы обеспечить движение хода экзоскелета 1.
Так, система 100 может содержать узел, образующий пружину сжатия, закрепленный, с одной стороны, на промежуточной детали 42 и, с другой стороны, на нижней конструкции 2 ноги и выполненный с возможностью воздействовать на конструкцию 4 ступни только во время фазы опоры, в частности, во время отрыва ступни.
Для этого образующий пружину узел 100 может, например, содержать полый корпус 110, который содержит первый 112 и второй 114 концы и в котором установлен упруго деформирующийся орган 120, имеющий первую жесткость.
Полый корпус 110 установлен в гнезде 105, выполненном в нижней конструкции 2 ноги. Гнездо содержит дно 106 и устье 108, при этом первый конец 112 полого корпуса 110 находится напротив дна 106. Кроме того, дно 106 содержит сквозное отверстие 107. Устье 108 может быть открытым и выходить наружу или может быть закрыто крышкой.
В частности, упруго деформирующийся орган 120 может содержать пружину. Полый корпус 110 может иметь цилиндрическую или трубчатую форму.
Пружина 120 установлена в полом корпусе 110 таким образом, чтобы приходить в положение упора в его первый конец 112, и соединена с крепежным элементом 130, проходящим через гнездо 105, полый корпус 110 и пружину 120 и выступающим из его первого конца 112 и сквозного отверстия 107. Кроме того, этот крепежный элемент 130 закреплен на конструкции 4 ступни, например, на уровне промежуточной детали 42.
В варианте осуществления крепежный элемент 130 является гибким и может, например, содержать тросик. Гибкость позволяет крепежному элементу 130 адаптироваться к движениям вращения конструкции 4 ступни и не передавать другие усилия, кроме усилий натяжения, на образующий пружину узел 100. В дальнейшем изобретение будет описано для конкретного случая крепежного элемента 130, содержащего тросик. Однако это не является ограничением, и тросик представляет собой всего лишь возможный вариант осуществления крепежного элемента.
Поскольку целью является разгрузка двигателей 60с, 63 во время фазы опоры, то есть когда ступня согнута, тросик 130 закреплен в задней зоне конструкции 4 ступни, предпочтительно в зоне, находящейся между первой поворотной осью Х1 и пяткой конструкции 4 ступни. В частности, тросик 130 может быть закреплен на промежуточной детали 42, например, при помощи детали 43, присоединенной к промежуточной детали 42 и выполненной с возможностью блокировки тросика 130 относительно промежуточной детали 42.
Предпочтительно пружина 120, находящаяся в полом корпусе 110, является коаксиальной с полым корпусом 110.
Соединение между пружиной 120 и тросиком 130 можно выполнить посредством склеивания или сварки. В варианте пружина 120 может содержать блокировочную деталь 122, закрепленную на части пружины 120 на расстоянии от первого конца 112 полого корпуса 110, тогда как тросик 130 имеет утолщение 132, выполненное с возможностью приходить в положение упора в блокировочную деталь 122. Натяжение, прикладываемое к тросику 130 в направлении, противоположном второму концу 114 полого корпуса 110, приводит к контакту утолщения 132 с блокировочной деталью 122 и к сжатию пружины 120.
Жесткость и длину пружины 120 выбирают в зависимости от длины тросика 130 и от углового диапазона, который может проходить конструкция 4 ступни относительно нижней конструкции 2 ноги, чтобы гарантировать, что тросик 130 останется натянутым в любой момент при любом положении конструкции 4 ступни относительно нижней конструкции 2 ноги и, следовательно, в любой фазе ходьбы экзоскелета 1. Действительно, это позволяет улучшить время реакции образующего пружину узла 100 и избегать возможных рывков, которые могли бы вызвать дискомфорт у пользователя.
Кроме того, тросик 130 содержит стопорный упор 134, закрепленный на или выполненный за одно целое с тросиком 130 между утолщением 132 и концом тросика 130, находящемся в полом корпусе 110, и взаимодействующий с выступом 116, закрепленным в полом корпусе 110 и образующим препятствие для стопорного упора 134. Например, выступ 116 может иметь форму фланца. Стопорный упор 134 может быть закреплен на конце тросика 130.
Наконец, образующий пружину узел 100 содержит рабочую пружину 140, установленную в гнезде 105 вокруг полого корпуса 110. Рабочая пружина 140 находится в положении опоры и сжата между дном 106 гнезда 105 нижней конструкции 2 ноги и упором 118, выполненным на полом корпусе 110. Таким образом, рабочая пружина 140 и полый корпус 110 являются коаксиальными, при этом полый корпус 110 образует опору для рабочей пружины 140. В частности, упор 118 полого корпуса 110 может быть закреплен вблизи его второго конца 114 и может содержать болт, позволяющий, в случае необходимости, перемещать упор 118 относительно полого корпуса 110 и, следовательно, регулировать жесткость рабочей пружины 140.
Таким образом, когда на тросик 130 действует усилие натяжения, утолщение 132 перемещается в полом корпусе 110 и сжимает пружину 120, пока стопорный упор 134 не войдет в контакт с выступом 166 и не заблокирует относительное перемещение тросика 130 и пружины 120 относительно полого корпуса 110. Таким образом, тросик 130 оказывается заблокированным в поступательном движении выступом 116 и больше не может сжимать пружину 120. Если конструкция 4 ступни продолжает тянуть тросик 130, узел, образованный тросиком 130, полым корпусом 110 и упором 118, перемещается, сжимая пружину 140 между упором 118 и дном 106 гнезда 105, поскольку гнездо 105 неподвижно соединено и движется вместе с нижней конструкцией 2 ноги.
Параметры образующего пружину узла 100 можно предусмотреть таким образом, чтобы эта конфигурация соответствовала случаю, когда конструкция 4 ступни инициирует фазу опоры на землю.
Предпочтительно жесткость рабочей пружины 140 больше жесткости пружины 120, установленной в полом корпусе 110, что позволяет сжиматься только пружине 120, находящейся в полом корпусе 110, пока стопорный упор 134 не придет в положение контакта с выступом 116. Действительно, в этой фазе нет необходимости в разгрузке двигателей 60с, 63. Затем, когда стопорный упор 134 приходит в положение упора в выступ 116, тросик 130 действует усилием натяжения на полый корпус 110, который стремится сжать рабочую пружину 140 и, следовательно, создать момент на конструкции 4 ступни вокруг первой поворотной оси Х1, чтобы вытянуть ступню, что приводит к разгрузке двигателей 60с, 63 приводов 60 и позволяет создать импульс, необходимый для отрыва ступни во время цикла ходьбы.
Разумеется, понятно, что можно применять и другие упругие органы, обладающие жесткостью, вместо пружины 120, установленной в полом корпусе 110, и/или рабочей пружины 140.
Кроме того, узел 100, образующий пружину сжатия, можно применять независимо от описанного экзоскелета 1 на любом устройстве, требующем приложения усилия только в некоторых фазах работы устройства. Таким образом, описание этого образующего пружину узла 100 можно применять для любого устройства, содержащего первую деталь, на которой может быть закреплен полый корпус 110, поддерживающий рабочую пружину 140, и вторую деталь, которая является подвижной относительно первой детали и на которой может быть закреплен другой конец рабочей пружины 140, чтобы прикладывать к нему усилие. При этом крепежный элемент 130 закреплен на второй детали таким образом, чтобы действовать усилием на пружину 120, находящуюся в полом корпусе 110, когда вторая деталь перемещается относительно первой, пока не достигнет заранее определенного порога, начиная от которого крепежный элемент, пружина 120 и полый корпус 110 перемещаются вместе, при этом только рабочая пружина 140 подвергается напряжению и действует усилием на обе детали.
| название | год | авторы | номер документа |
|---|---|---|---|
| Экзоскелет | 2020 |
|
RU2734565C1 |
| ЭКЗОСКЕЛЕТ И СПОСОБ ЕГО ИСПОЛЬЗОВАНИЯ | 2015 |
|
RU2696631C2 |
| СКЛАДНОЙ ВЕЛОМОБИЛЬ | 2002 |
|
RU2243124C2 |
| Скелетон с лыжами | 2024 |
|
RU2839506C1 |
| ГОЛЕНОСТОПНОЕ ЗВЕНО ОРТЕЗА ИЛИ ЭКЗОСКЕЛЕТА | 2017 |
|
RU2687573C2 |
| Тренажерный комплекс для функциональной терапии нижних конечностей и способ его применения | 2017 |
|
RU2678916C1 |
| УСТРОЙСТВО КРЕПЛЕНИЯ БОТИНКА К СПОРТИВНОМУ ИЗДЕЛИЮ | 2004 |
|
RU2288017C2 |
| ГОЛЕННОЕ ЗВЕНО ОРТЕЗА ИЛИ ЭКЗОСКЕЛЕТА | 2016 |
|
RU2635760C1 |
| РОЛИКОВЫЕ КОНЬКИ | 2003 |
|
RU2252809C2 |
| Кресло и опорные структуры | 2012 |
|
RU2625225C2 |
Изобретение относится к медицине, а именно к экзоскелетам. Экзоскелет содержит конструкцию таза, две верхние и две нижние конструкции ноги, две конструкции ступни и две конструкции бедер. Указанные конструкции соединены между собой посредством механических сочленений и выполнены с возможностью приведения в действие при помощи по меньшей мере одного привода, установленного на каждой из указанных конструкций. Конструкция ступни содержит опорную плоскость, выполненную с возможностью опоры на нее ступни пользователя. Нижняя конструкция ноги выполнена с возможностью размещения в ней нижней части ноги пользователя. Механическое сочленение колена выполнено с возможностью соединять нижнюю конструкцию ноги с верхней конструкцией ноги, выполненной с возможностью размещения в ней верхней части ноги пользователя. Механическое сочленение колена имеет поворотную ось. Механическое сочленение лодыжки соединяет конструкцию ступни с нижней конструкцией ноги. Механическое сочленение лодыжки содержит первое поворотное сочленение, имеющее первую поворотную ось. Первая поворотная ось и поворотная ось механического сочленения колена образуют угол, заключенный между 0° и 15°. Механическое сочленение лодыжки содержит второе поворотное сочленение, имеющее вторую поворотную ось. Вторая поворотная ось расположена в плоскости, перпендикулярной к первой поворотной оси, и образует с опорной плоскостью угол, заключенный между 30° и 60°, когда экзоскелет стоит вертикально и находится в состоянии покоя. Изобретение обеспечивает воспроизведение экзоскелетом движения ходьбы, близкого к движению ходьбы человека. 26 з.п. ф-лы, 14 ил.
1. Экзоскелет, содержащий конструкцию таза, две верхние и две нижние конструкции ноги, две конструкции ступни, две конструкции бедер, располагаемые, каждая, напротив соответствующих частей тела пользователя, при этом указанные конструкции соединены между собой посредством механических сочленений и выполнены с возможностью приведения в действие при помощи по меньшей мере одного привода, установленного на каждой из указанных конструкций, при этом:
- конструкция ступни содержит опорную плоскость, выполненную с возможностью опоры на нее ступни пользователя,
- нижняя конструкция ноги выполнена с возможностью размещения в ней нижней части ноги пользователя,
- механическое сочленение колена выполнено с возможностью соединять нижнюю конструкцию ноги с верхней конструкцией ноги, выполненной с возможностью размещения в ней верхней части ноги пользователя, при этом механическое сочленение колена имеет поворотную ось, и
- механическое сочленение лодыжки соединяет конструкцию ступни с нижней конструкцией ноги, при этом механическое сочленение лодыжки содержит первое поворотное сочленение, имеющее первую поворотную ось, причем указанная первая поворотная ось и поворотная ось механического сочленения колена образуют угол, заключенный между 0° и 15°,
отличающийся тем, что механическое сочленение лодыжки содержит второе поворотное сочленение, имеющее вторую поворотную ось, при этом вторая поворотная ось расположена в плоскости, перпендикулярной к первой поворотной оси, и образует с опорной плоскостью угол, заключенный между 30° и 60°, когда экзоскелет стоит вертикально и находится в состоянии покоя.
2. Экзоскелет по п. 1, в котором вторая поворотная ось образует с опорной плоскостью угол, заключенный между 40° и 50°, когда экзоскелет стоит вертикально и находится в состоянии покоя, предпочтительно угол порядка 45°.
3. Экзоскелет по одному из пп. 1 или 2, дополнительно содержащий два параллельных привода, закрепленные между конструкцией ступни и нижней конструкцией ноги и выполненные с возможностью контролировать угловое положение конструкции ступни вокруг первой и второй поворотных осей механического сочленения лодыжки.
4. Экзоскелет по п. 3, в котором параллельные приводы закреплены с двух сторон от нижней конструкции ноги.
5. Экзоскелет по одному из пп. 3 или 4, в котором каждый из приводов содержит:
- линейный привод, установленный на нижней конструкции ноги, и
- тягу, установленную с одной стороны на линейном приводе и с другой стороны на конструкции ступни при помощи шарового сочленения таким образом, чтобы поступательное перемещение линейного привода приводило к вращению тяги относительно конструкции ступни.
6. Экзоскелет по п. 5, в котором линейные приводы содержат домкрат, связанный с двигателем, предпочтительно типа шарикового винта или системы винт-гайка.
7. Экзоскелет по одному из пп. 1–6, в котором домкрат содержит резьбовой шток, приводимый во вращение двигателем, и гайку, неподвижную относительно конструкции ноги, при этом тяга содержит конец, установленный на гайке таким образом, чтобы поступательное перемещение гайки приводило к поступательному перемещению конца тяги.
8. Экзоскелет по п. 7, в котором каждый привод дополнительно содержит по меньшей мере одну кулису, содержащую направляющую, закрепленную на нижней конструкции ноги, и подвижную каретку, выполненную с возможностью поступательного перемещения вдоль направляющей, при этом гайка закреплена на каретке кулисы.
9. Экзоскелет по п. 8, в котором каретка содержит первый ползун и второй ползун, установленные подвижно с возможностью поступательного перемещения по направляющей кулисы и неподвижно соединенные при помощи соединительной детали, при этом гайка и тяга закреплены на соединительной детали каретки.
10. Экзоскелет по одному из пп. 7–9, в котором механическое сочленение между гайкой и тягой содержит поворотное сочленение и механическое сочленение между тягой и конструкцией ступни содержит шаровое сочленение.
11. Экзоскелет по п. 10, в котором механическое сочленение между гайкой и тягой содержит карданный шарнир или два поворотных сочленения с по существу перпендикулярной осью.
12. Экзоскелет по одному из пп. 7–11, в котором домкрат дополнительно содержит подшипник качения, расположенный между выходом двигателя и резьбовым штоком, при этом указанный подшипник имеет отклонение от соосности, составляющее от пяти дуговых минут до пятнадцати дуговых минут, предпочтительно десять дуговых минут.
13. Экзоскелет по одному из пп. 1–12, в котором:
- первое поворотное сочленение расположено на конструкции ступни таким образом, чтобы приходить в положение напротив медиальной лодыжки и латеральной лодыжки пользователя, на котором надет экзоскелет, и/или
- второе поворотное сочленение расположено на конструкции ступни таким образом, чтобы приходить в положение напротив пятки или ахиллова сухожилия пользователя.
14. Экзоскелет по одному из пп. 1–13, в котором первая поворотная ось и поворотная ось механического сочленения колена образуют угол, заключенный между 6° и 10°, например 8°.
15. Экзоскелет по одному из пп. 1–14, в котором первая поворотная ось расположена в плоскости, параллельной земле, когда экзоскелет стоит вертикально и находится в состоянии покоя.
16. Экзоскелет по одному из пп. 1–15, дополнительно содержащий промежуточную деталь, которая с одной стороны установлена на конструкции ступни, будучи свободной во вращении относительно конструкции ступни вокруг второй поворотной оси, и с другой стороны установлена с возможностью поворота вокруг первой поворотной оси на нижней конструкции ноги.
17. Экзоскелет по п. 16, в котором промежуточная деталь установлена на нижней конструкции ноги и на конструкции ступни при помощи пассивных поворотных сочленений.
18. Экзоскелет по одному из пп. 16 или 17, дополнительно содержащий узел, образующий пружину сжатия, закрепленный с одной стороны на промежуточной детали и с другой стороны на нижней конструкции ноги.
19. Экзоскелет по п. 18, в котором образующий пружину узел содержит первый упругодеформирующийся орган, при этом первый орган соединен с одной стороны с промежуточной деталью между первым и вторым поворотными сочленениями при помощи крепежного элемента и с другой стороны с нижней конструкцией ноги, при этом указанный первый орган выполнен с возможностью действовать усилием натяжения на промежуточную деталь.
20. Экзоскелет по п. 19, в котором крепежный элемент является гибким.
21. Экзоскелет по одному из пп. 19 или 20, в котором образующий пружину узел дополнительно содержит полый корпус по существу удлиненной формы, имеющий первый конец и второй конец, противоположный первому концу, при этом указанный полый корпус установлен в гнезде, выполненном в нижней конструкции ноги, при этом первый конец полого корпуса находится напротив дна гнезда и первый орган установлен в гнезде и сжат между дном указанного гнезда и вторым концом полого корпуса.
22. Экзоскелет по п. 21, дополнительно содержащий второй упругодеформирующийся орган, расположенный в полом корпусе, при этом второй орган закреплен вблизи первого конца полого корпуса, при этом крепежный элемент взаимодействует со вторым органом таким образом, чтобы второй орган мог натягивать крепежный элемент, и крепежный элемент расположен в полом корпусе и выступает из первого конца указанного полого корпуса и из дна гнезда.
23. Экзоскелет по п. 22, в котором первый орган и/или второй орган содержит пружину сжатия.
24. Экзоскелет по п. 23, в котором первый орган и второй орган содержат пружину сжатия, при этом второй орган имеет жесткость, меньшую жесткости первого органа.
25. Экзоскелет по одному из пп. 21–24, в котором крепежный элемент имеет утолщение, расположенное в полом корпусе, и второй орган содержит блокировочную деталь, выполненную с возможностью образовать упор для утолщения.
26. Экзоскелет по одному из пп. 21–25, в котором крепежный элемент дополнительно содержит стопорный упор, закрепленный на крепежном элементе, и полый корпус дополнительно содержит выступ, закрепленный на внутренней стенке полого корпуса и выполненный с возможностью взаимодействовать со стопорным упором и образовать препятствие для стопорного упора крепежного элемента.
27. Экзоскелет по одному из пп. 21–26, в котором полый корпус дополнительно содержит болт, закрепленный вблизи его второго конца, при этом первый орган упирается в указанный болт.
| JP 2005296103 A, 27.10.2005 | |||
| ПАССИВНЫЙ ГРУЗОВОЙ ЭКЗОСКЕЛЕТОН, КОЛЕННЫЙ ШАРНИР ПАССИВНОГО ГРУЗОВОГО ЭКЗОСКЕЛЕТОНА, КОМПЕНСАТОР ПАССИВНОГО ГРУЗОВОГО ЭКЗОСКЕЛЕТОНА | 2007 |
|
RU2362598C2 |
| РАСПРЕДЕЛЕННАЯ ВОЛОКОННО-ОПТИЧЕСКАЯ СИСТЕМА РЕГИСТРАЦИИ ВИБРОАКУСТИЧЕСКИХ СИГНАЛОВ | 2011 |
|
RU2485454C2 |
| US 20060069336 A1, 30.03.2006 | |||
| УСТРОЙСТВО ПРОЕЦИРОВАНИЯ ПОЛЕТНОЙ ИНФОРМАЦИИ | 2002 |
|
RU2231096C2 |
| FR 3004105 A3, 10.10.2014. | |||

