Изобретение относится к системе для оказания человеку помощи для поддержки и передачи нагрузки, а именно к экзоскелету, который выполнен, в частности, с возможностью поддерживать пользователя, страдающего дефицитом подвижности.
Известен патент РФ №164649, от 10.09.2016 в котором раскрыт экзоскелетон, включающий в себя основание и приводы поступательного движения, основание выполнено в виде трех звеньев, причем стойка шарнирно соединена с бедренным звеном, а бедренное звено шарнирно соединено с голенным звеном, которое шарнирно соединено со стопой. При этом привод поступательного движения выполнен в виде двух независимых шарико-винтовых передач, кинематически связанных через ременную передачу со шкивами, жестко установленными на стойке и голенном звене, а шарико-винтовая передача дополнительно содержит упругий элемент, установленный между гайкой и упором винтов. Недостатком данного устройства является сложность конструкции.
Наиболее близким техническим решением является патент РФ №2721543 от 19.05.2020, в котором раскрыт экзоскелет, содержащий конструкцию таза, две верхние и две нижние конструкции ноги, две конструкции ступни, две конструкции бедер, располагаемые, каждая, напротив соответствующих частей тела пользователя, при этом указанные конструкции соединены между собой посредством механических сочленений и выполнены с возможностью приведения в действие при помощи, по меньшей мере, одного привода, установленного на каждой из указанных конструкций. При этом:
- конструкция ступни содержит опорную плоскость, выполненную с возможностью опоры на нее ступни пользователя,
- нижняя конструкция ноги выполнена с возможностью размещения в ней нижней части ноги пользователя,
- механическое сочленение колена выполнено с возможностью соединять нижнюю конструкцию ноги с верхней конструкцией ноги, выполненной с возможностью размещения в ней верхней части ноги пользователя, при этом механическое сочленение колена имеет поворотную ось, и
- механическое сочленение лодыжки соединяет конструкцию ступни с нижней конструкцией ноги, при этом механическое сочленение лодыжки содержит первое поворотное сочленение, имеющее первую поворотную ось, причем указанная первая поворотная ось и поворотная ось механического сочленения колена образуют угол, заключенный между 0° и 15°,
также механическое сочленение лодыжки содержит второе поворотное сочленение, имеющее вторую поворотную ось, при этом вторая поворотная ось расположена в плоскости, перпендикулярной к первой поворотной оси, и образует с опорной плоскостью угол, заключенный между 30° и 60°, когда экзоскелет стоит вертикально и находится в состоянии покоя. Недостатком данного устройства является необходимость использование достаточно мощных приводов, обеспечивающих подвижность конструкции.
Технический результат предлагаемого устройства – снижение нагрузки на двигатели во время движения.
Технический результат достигается тем, что экзоскелет содержит конструкцию таза, две подвижные конструкции бедер, две подвижные конструкции голени, две подвижные конструкции ступни, располагаемые, каждая, напротив соответствующих частей тела пользователя. Где указанные конструкции соединены между собой посредством механических сочленений и выполнены с возможностью приведения в действие при помощи, по меньшей мере, одного привода. А конструкция таза, две подвижные конструкции бедер, две подвижные конструкции голени, две подвижные конструкции ступни содержат средства для закрепления в них соответствующих частей пользователя. Также каждая из подвижных конструкций включает неподвижный блок и поворачивается посредством подвижного троса, проходящего через данный неподвижный блок. При этом подвижный трос прикреплен своими концами к двум подвижным блокам, каждый из которых приводится в действие приводом, через, по меньшей мере, один неподвижный блок и трос, образующие вместе силовой полиспаст.
Кроме того сочленения конструкции таза и каждой конструкции бедра, каждой конструкции бедра и соответствующей ей конструкции голени, каждой конструкции голени и соответствующей ей конструкции стопы выполнены посредством подшипника, расположенного соосно неподвижному блоку соответствующей конструкции бедра или голени или стопы.
Трос, по меньшей мере, один подвижный блок и, по меньшей мере, один неподвижный блок расположены внутри пластины образующей соответствующую конструкцию бедра или конструкцию голени или конструкции таза.
Конструкция устройства приведена на фиг. 1-6, где:
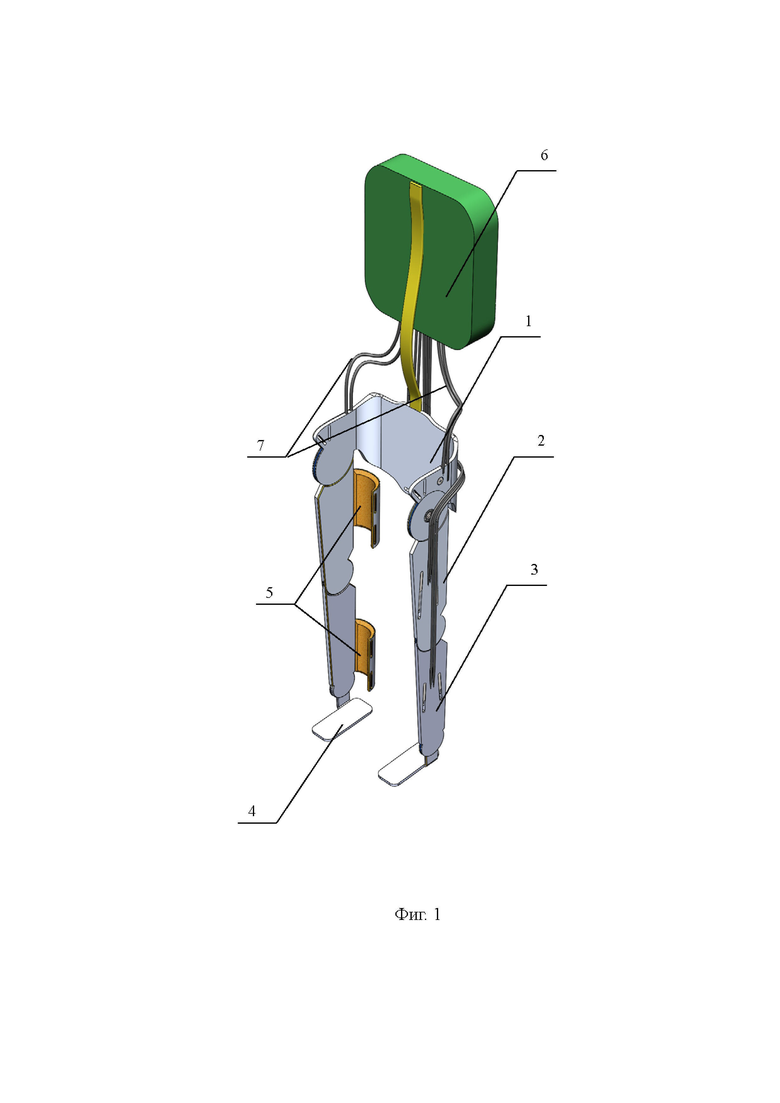
- на фиг. 1 показан общий вид предлагаемого устройства вид спереди;
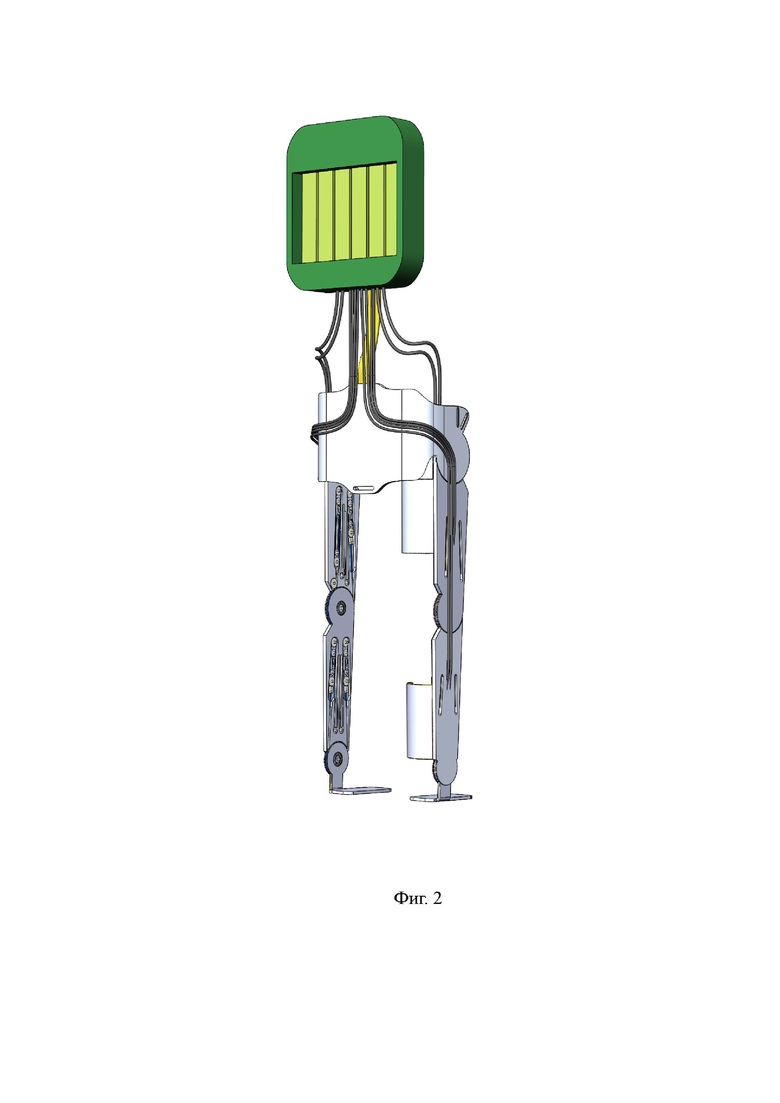
- на фиг. 2 показан общий вид предлагаемого устройства вид сзади;
- на фиг. 3 показан общий вид предлагаемого устройства вид спереди;
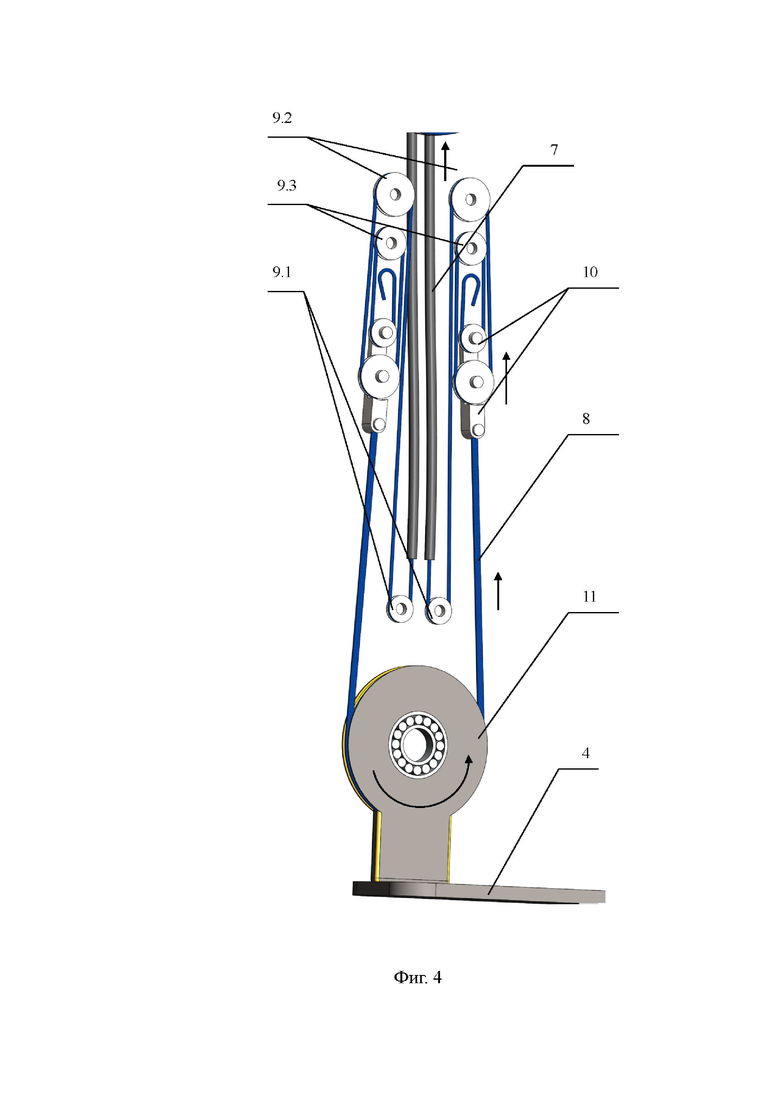
- на фиг. 4 схематично показана работа устройства при повороте стопы;
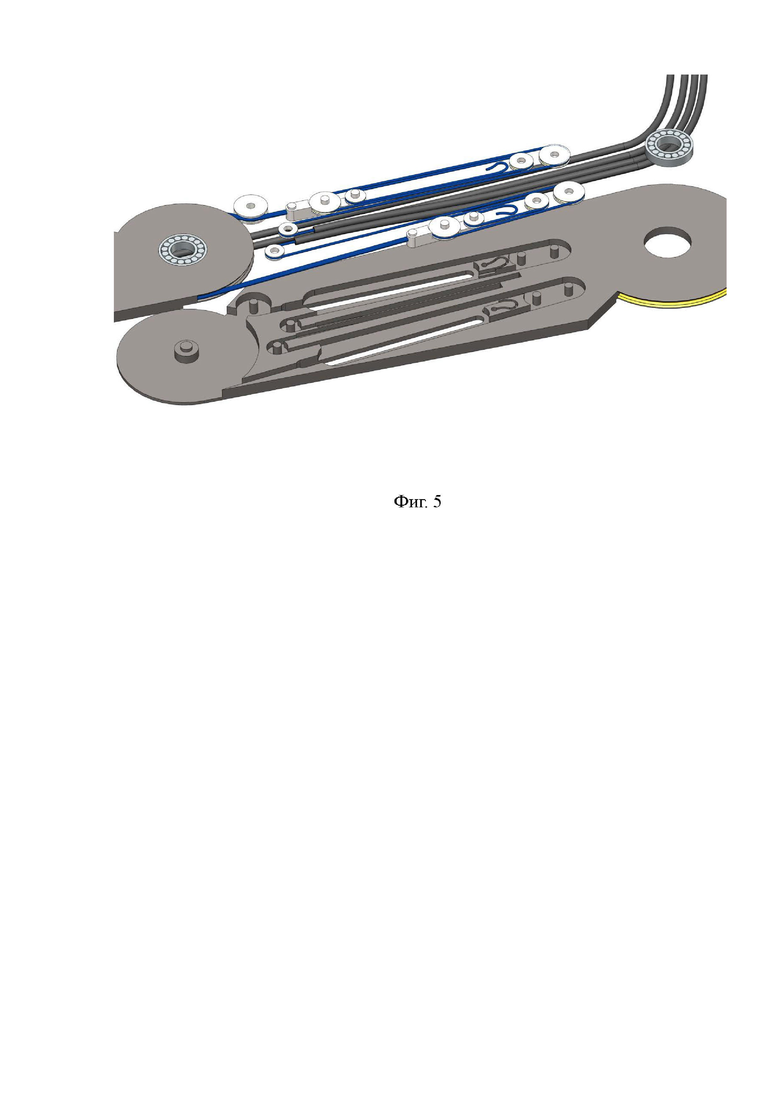
- на фиг. 5 схематично показана конструкция голени со всеми основными элементами;
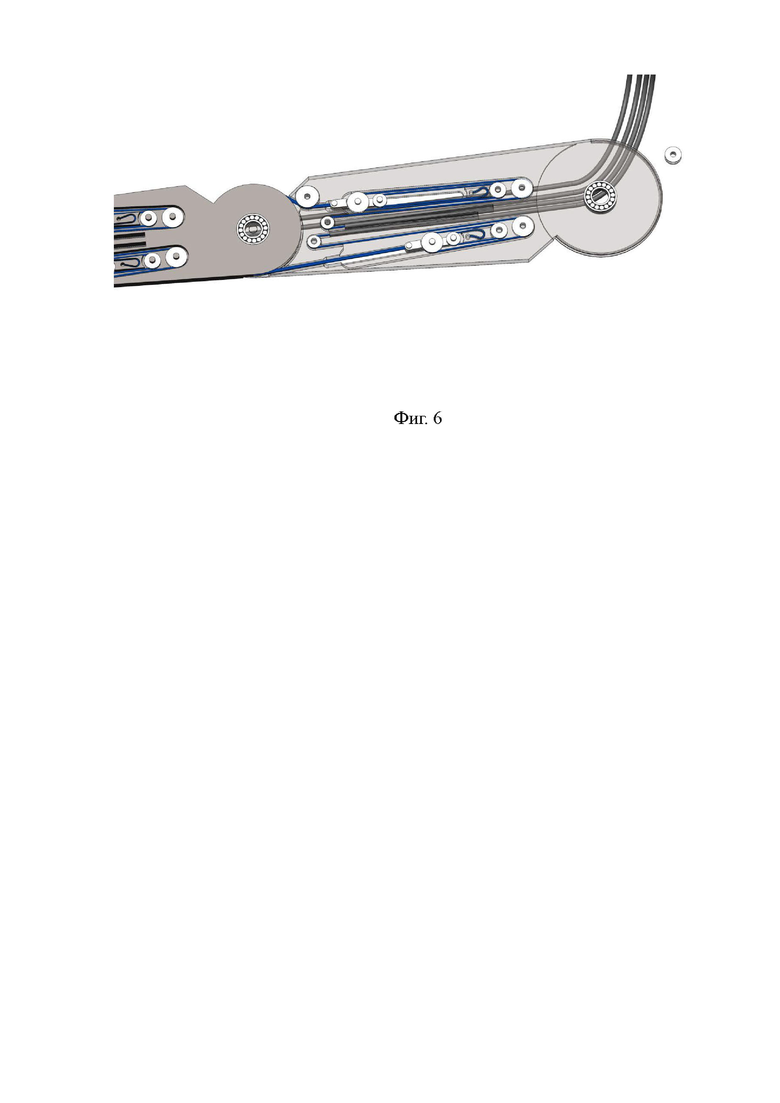
- на фиг. 6 схематично показана работа устройства, где подвижные блоки полиспаста в крайних положениях, нога полностью разогнута.
На чертежах изображены:
1 - конструкция таза;
2 - конструкция бедра;
3 - конструкция голени;
4 - конструкция стопы;
5 - средства для закрепления тела пользователя;
6 - приводы;
7 - трос полиспаста;
8 - трос поворота конструкции;
9.1-9.3 - неподвижные блоки полиспаста;
10 - подвижные блоки полиспаста;
11 - неподвижный блок поворотной конструкции экзоскелета.
Устройство, показанное на фиг.1-6, состоит из подвижных, а точнее поворотных конструкций бедра, голени и стопы.
На фиг.4 показано схематичная работа поворота стопы 4 предлагаемого устройства. Поворот стопы осуществляется посредством силовой системы полиспаст (https://ru.wikipedia.org/wiki/%D0%9F%D0%BE%D0%BB%D0%B8%D1%81%D0%BF%D0%B0%D1%81%D1%82) При этом сама система блоков и тросов полиспаст расположена в пазах конструкции голени 3, выполненной в виде плоской пластины и сочлененной с конструкцией стопы 4 посредством подшипника качения. Система блоков и тросов полиспаст, расположенная в пазах конструкции голени 3, содержит симметрично расположенные друг относительно друга 2 секции, каждая из которых содержит: неподвижный блок 9.1, неподвижный блок 9.2, подвижный блок 10, неподвижный блок 9.3, трос 7 и общий трос поворота конструкции 8, в данном случае стопы 4, пропущенный через неподвижный блок 11 поворачиваемой конструкции экзоскелета. Подшипник качения закреплен внешним кольцом в конструкции стопы 4, а внутренним кольцом в конструкции голени 3.
Для поворота голени используется аналогичная система блоков и тросов полиспаст, как описана выше, расположенная в пазах конструкции бедра 2, также выполненной в виде плоской пластины и сочлененной с конструкцией голени 3 посредством подшипника качения.
Для поворота каждого бедра также может использоваться аналогичная система блоков и тросов полиспаст, как описана выше, расположенная в пазах конструкции таза 1, также выполненной в виде плоской пластины и сочлененной с конструкцией бедра 2 посредством подшипника качения, либо же тросы двигателя напрямую поворачивают неподвижный блок каждой конструкции бедра 2.
Поворот стопы (голени, бедра) 4 осуществляется следующим образом.
Трос полиспаста 7 в первой секции приводом 6 перемешается вверх, как показано на фиг.4 стрелкой вверх, трос полиспаста 7 проходит через неподвижный блок полиспаста 9.1, затем неподвижный блок 9.2, и смещает подвижные блоки полиспаста 10. Конец троса полиспаста 7 проходит неподвижный блок 9.3, подвижные блоки полиспаста 10 и закреплен в конструкции паза голени 3. При этом соответственно во второй симметричной секции трос полиспаста 7 расположен аналогично и движется в противоположном направлении, аналогично, как в первой секции. К подвижным блокам полиспаста 10 каждой секции жестко прикреплен трос поворота конструкции 8, в данном случае стопы, который пропущен через неподвижный блок 11 стопы, располагаемый соосно с подшипником стопы. И таким образом при перемещении подвижных блоков полиспаста 10 в одной секции вверх, а в другой секции вниз трос поворота конструкции 8 поворачивает стопу 4. При этом трос поворота конструкции 8 выполняют большей толщины чем трос полиспаста 7 (может использоваться звездочка и цепь). Работа привода осуществляется в зависимости от пользователя, т.е. пока пользователь прилагает усилие в ту или иную сторону привод работает и помогает пользователю.
Аналогичным образом осуществляется поворот второй стопы, а также обеих конструкций голени и обеих конструкций бедер. При этом для работы используют, по крайней мере, шесть приводов, каждый для поворота своего сочленения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭКЗОСКЕЛЕТ, СОДЕРЖАЩИЙ МЕХАНИЧЕСКОЕ СОЧЛЕНЕНИЕ ЛОДЫЖКИ С ДВУМЯ ПОВОРОТНЫМИ ОСЯМИ | 2016 |
|
RU2721543C2 |
| ГРУЗОВОЙ ЭКЗОСКЕЛЕТ С НАСТРОЙКОЙ ПОД АНТРОПОМЕТРИЧЕСКИЕ ПАРАМЕТРЫ ПОЛЬЗОВАТЕЛЯ | 2017 |
|
RU2665116C1 |
| Тазобедренный шарнирный модуль экзоскелета | 2023 |
|
RU2818620C1 |
| МЯГКИЙ МНОГОРЕЖИМНЫЙ ЭКЗОСКЕЛЕТ | 2022 |
|
RU2797688C1 |
| ЭКЗОСКЕЛЕТ С ИЗМЕНЯЕМОЙ ЖЁСТКОСТЬЮ | 2021 |
|
RU2780275C1 |
| ЭКЗОСКЕЛЕТ И СПОСОБ ЕГО ИСПОЛЬЗОВАНИЯ | 2015 |
|
RU2696631C2 |
| ГОЛЕНОСТОПНОЕ ЗВЕНО ОРТЕЗА ИЛИ ЭКЗОСКЕЛЕТА | 2017 |
|
RU2687573C2 |
| Экзоскелет | 2023 |
|
RU2823489C1 |
| Экзоскелет для поддержки корпуса и нижних конечностей человека | 2024 |
|
RU2839503C1 |
| Экзоскелет | 2023 |
|
RU2833109C1 |

Изобретение относится к системе для оказания человеку помощи для поддержки и передачи нагрузки, а именно к экзоскелету, который выполнен, в частности, с возможностью поддерживать пользователя, страдающего дефицитом подвижности. Предлагается экзоскелет, который содержит конструкцию таза (1), две подвижные конструкции бедер (2), две подвижные конструкции голени (3), две подвижные конструкции ступни (4), располагаемые, каждая, напротив соответствующих частей тела пользователя. Указанные конструкции соединены между собой посредством механических сочленений и выполнены с возможностью приведения в действие при помощи по меньшей мере одного привода (6). А конструкция таза, две подвижные конструкции бедер, две подвижные конструкции голени, две подвижные конструкции ступни содержат средства для закрепления (5) в них соответствующих частей пользователя. Каждая из подвижных конструкций включает неподвижный блок (11) и поворачивается посредством подвижного троса (8), проходящего через данный неподвижный блок. Подвижный трос прикреплен своими концами к двум подвижным блокам (10), каждый из которых приводится в действие приводом, через по меньшей мере один неподвижный блок (9) и трос (7), образующие вместе силовой полиспаст. Технический результат - снижение нагрузки на двигатели во время движения. 2 з.п. ф-лы, 6 ил.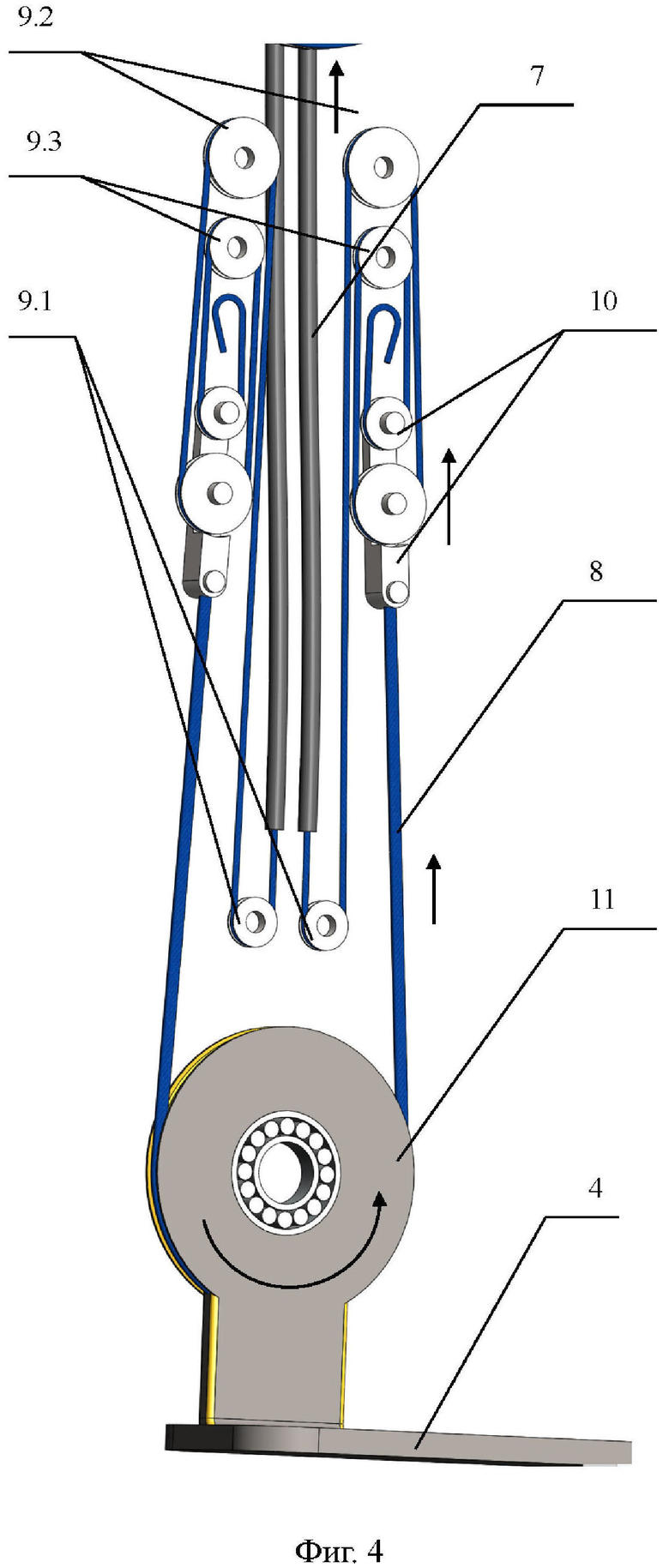
1. Экзоскелет, содержащий конструкцию таза, две подвижные конструкции бедер, две подвижные конструкции голени, две подвижные конструкции ступни, располагаемые, каждая, напротив соответствующих частей тела пользователя, где указанные конструкции соединены между собой посредством механических сочленений и выполнены с возможностью приведения в действие при помощи по меньшей мере одного привода, а конструкция таза, две подвижные конструкции бедер, две подвижные конструкции голени, две подвижные конструкции ступни содержат средства для закрепления в них соответствующих частей пользователя, отличающийся тем, что каждая из подвижных конструкций включает неподвижный блок и поворачивается посредством подвижного троса, проходящего через неподвижный блок, при этом подвижный трос прикреплен своими концами к двум подвижным блокам, каждый из которых приводится в действие приводом, через по меньшей мере один неподвижный блок и трос, образующие вместе силовой полиспаст.
2. Экзоскелет по п. 1 формулы, отличающийся тем, что сочленения конструкции таза и каждой конструкции бедра, каждой конструкции бедра и соответствующей ей конструкции голени, каждой конструкции голени и соответствующей ей конструкции стопы выполнены посредством подшипника, расположенного соосно неподвижному блоку соответствующей конструкции бедра или голени или стопы.
3. Экзоскелет по п. 1, отличающийся тем, что трос, по меньшей мере один подвижный блок и по меньшей мере один неподвижный блок расположены внутри пластины, образующей соответствующую конструкцию бедра или конструкцию голени или конструкцию таза.
| US 9545353 B2, 17.01.2017 | |||
| EP 3280374 B1, 08.01.2020 | |||
| Аппарат для заделки полостей в свежеотформованных полых кирпичах | 1930 |
|
SU31367A1 |
| ГРУЗОВОЙ ПАССИВНЫЙ ЭКЗОСКЕЛЕТ С НАСТРОЙКОЙ ПОД АНТРОПОМЕТРИЧЕСКИЕ ПАРАМЕТРЫ ПОЛЬЗОВАТЕЛЯ | 2018 |
|
RU2725288C2 |
| ПАССИВНЫЙ ГРУЗОВОЙ ЭКЗОСКЕЛЕТОН, КОЛЕННЫЙ ШАРНИР ПАССИВНОГО ГРУЗОВОГО ЭКЗОСКЕЛЕТОНА, КОМПЕНСАТОР ПАССИВНОГО ГРУЗОВОГО ЭКЗОСКЕЛЕТОНА | 2007 |
|
RU2362598C2 |

