Изобретение относится к винтовертному устройству в соответствии с пунктом 1 и способу ввинчивания винта в стену в соответствии с пунктом 12 формулы изобретения.
В публикации WO 2010/24794 A1 описан соединительный элемент между захватом и механической рукой промышленного робота. С использованием комбинации из захвата и соединительного элемента промышленный робот должен быть в состоянии захватывать неупорядоченно лежащие в емкости детали. Соединительный элемент содержит для этого расположенный, например, между двумя передаточными элементами резиновый шар. Кроме того, соединительный элемент содержит устройство измерения силы, причем для определения приводного усилия определяют расстояние между обоими передаточными элементами.
В публикации JP 2010 264514 А описано винтовертное устройство и способ ввинчивания винта в деталь. Винтовертное устройство содержит датчик силы, например, в виде динамометрического датчика. При ввинчивании винта в деталь производят регулировку требуемого приводного усилия.
Заявка ЕР 0 421 323 В1 описывает соединительный элемент для присоединения инструмента в виде шлифовальной бабки для шлифования поверхности детали с помощью механической руки. Соединительный элемент содержит датчик усилия в виде тензорезистора для измерения действующей на шлифовальную бабку силы. Кроме того, может быть определена позиция шлифовальной бабки. Базируясь на этом, осуществляют регулирование силы и позиции. Шлифование поверхности детали представляет собой сравнительно равномерный процесс, в результате чего действующая на шлифовальную бабку сила может быть измерена надежно и без существенного ухудшения со стороны возмущающих воздействий.
Существуют, однако, также случаи использования, при которых мешающие воздействия, например, импульсы силы в виде ударов или вибраций воздействуют на присоединенный к руке робота инструмент и существенно затрудняют, таким образом, непосредственное измерение силы, например, с помощью тензорезистора, или даже делают его невозможным. Такие мешающие воздействия возникают, например, при ввинчивании винта в массивную стену, в частности, в бетонную стену.
В противоположность этому задачей изобретения является, в частности, предложение винтовертного устройства с соединительным элементом для соединения инструмента с механической рукой, которое обеспечивает возможность несложного и/или надежного определения величины, характеризующей силу на винтовертном устройстве. В соответствии с изобретением эта задача решается признаками пункта 1. Кроме того, задачей изобретения является, в частности, создание способа ввинчивания винта в стену с помощью расположенного на механической руке винтовертного устройства, которое обеспечивает возможность надежного ввинчивания винта. В соответствии с изобретением эта задача решается с помощью способа признаками пункта 12.
Соответствующее изобретению винтовертное устройство содержит соединительный элемент для соединения винтоверта с механической рукой, причем соединительный элемент содержит первый, расположенный на стороне робота передаточный элемент, второй, расположенный на стороне инструмента передаточный элемент, расположенный между первым и вторым передаточными элементами возвратный элемент и элемент для измерения расстояния. Оба передаточных элемента могут перемещаться в направлении друг к другу против стабилизирующей силы, то есть за счет приложения приводного усилия в направлении приведения в действие. Элемент для измерения расстояния выполнен и расположен таким образом, что он может измерять расстояние, характеризирующее расстояние между передаточными элементами в направлении приведения в действие. Винтоверт служит, в частности, для ввинчивания винтов в стену.
Поскольку оба передаточных элемента могут перемещаться в направлении друг к другу лишь против названной стабилизирующей силы возвратного элемента, расстояние, измеренное элементом для измерения расстояния, представляет собой меру для названной приводной силы, с которой происходит прижим друг к другу обоих передаточных элементов. Приводная сила находится в равновесии с действующей на винтоверте против направления приведения в действие силой, так что измеренное расстояние представляет собой также меру для силы, действующей на винтоверт. Таким образом можно весьма точным и надежным способом косвенно измерить приводную силу, а также силу, действующую на винтоверт.
Комбинация из измерения расстояния и возвратного элемента служит для обеспечения высокой нечувствительности косвенного определения приводного усилия к толчкам и вибрациям. Это относится, в частности, к случаю, когда измерение расстояния производят бесконтактным способом. Таким образом, измеренное расстояние представляет собой величину, нагруженную меньшим количеством мешающих воздействий, и может служить, тем самым, при передаче на систему управления механической руки, в частности, в качестве регулируемой величины регулирования, в частности, позиции руки робота. С помощью этого измеренное расстояние и косвенно приводная сила и сила на винтоверте могут быть надежно и точно отрегулированы применительно к требуемой величине или характеристике.
Описанный соединительный элемент мог бы быть соединен не только с винтовертом, но также и с другим инструментом. Под инструментом в данном случае следует понимать элемент, с помощью которого может быть обработан или захвачен или перемещен предмет. Инструмент может быть выполнен, например, в виде сверлильного станка или в виде захвата. Инструмент должен быть выполнен в виде самостоятельного инструмента, например, в виде сверлильного станка с собственным приводом. Однако, возможно также, что механическая рука содержит привод для инструмента и инструмент в этом случае выполнен, например, лишь в качестве простой дрели.
Под механической рукой в данном случае следует понимать способный активно перемещаться элемент мехатронного компонента. Мехатронный компонент содержит взаимодействующие механические, электронные и информационно-технические элементы или модули и может быть выполнен, в частности, в виде промышленного робота.
Под промышленным роботом можно понимать универсальную, часто программируемую машину для манипулирования, монтажа и/или обработки деталей и конструктивных элементов. Такие роботы задуманы для использования в промышленной среде и до настоящего времени их используют, например, при промышленном крупносерийном изготовлении комплексных изделий, например, при изготовлении автомобилей.
Обычно промышленный робот содержит так называемый манипулятор в виде механической руки, так называемый исполнительный орган и систему управления. Механическая рука может поворачиваться вокруг, например, одной или нескольких осей и/или перемещаться вдоль одного или нескольких направлений. Как и в настоящем случае исполнительный элемент может представлять собой инструмент в описанном выше смысле, а также и аналогичное устройство. Система управления может служить для пригодного управления манипулятором и/или исполнительным элементом, то есть, например, для пригодного перемещения и/или направления и, следовательно, также для приложения определенной приводной силы.
После исходного программирования промышленный робот обычно способен выполнять рабочие операции в частично автоматическом или полностью автоматическом режиме, то есть в существенной мере автономно. При этом выполнение рабочей операции может варьироваться в известных пределах, например, в зависимости от поступающей от датчиков информации. Далее, система управления промышленного робота может быть выполнена по мере необходимости самообучающейся.
Оба передаточных элемента соединительного элемента выполнены, в частности, в форме диска или цилиндра, в частности, в форме полого цилиндра. Элемент для измерения расстояния стационарно расположен напротив одного из передаточных элементов и измеряет расстояние в направлении приведения в действие к другому передаточному элементу или другому элементу, стационарно соединенному с другим передаточным элементом. Измеренное расстояние представляет собой, тем самым, меру расстояния между обоими передаточными элементами в направлении приведения в действие. При знании позиции устройства для измерения расстояния относительно первого передаточного элемента и позиции конструктивного элемента, относительно которого измеряют расстояние, относительно второго передаточного элемента может быть рассчитано расстояние между обоими передаточными элементами в направлении приведения в действие. При этом устройство для измерения расстояния может базироваться на различных принципах измерения, например, ультразвуке, лазерном излучении, инфракрасном излучении и т.п.
В исполнении изобретения возвратный элемент выполнен в качестве, по меньшей мере, одной пружины, в частности, в качестве линейной пружины. Пружины выполнены, в частности, в виде винтовых пружин, причем возможны также другие виды пружин, например, тарельчатые пружины. Возможно также использование нескольких пружин, которые, в частности, расположены параллельно друг другу. Одна или несколько пружин ориентированы в направлении приведения в действия, так что их сжатие происходит, если оба передаточных элемента перемещаются друг к другу в направлении приведения в действие, если уменьшается расстояние между ними.
В случае пружин существует взаимосвязь между так называемым ходом пружины и силой пружины в виде восстанавливающей силы, причем ход пружины может возникать в результате растяжения или сжатия пружин. В случае линейной пружины существует, по меньшей мере, приблизительно линейная взаимосвязь между ходом пружины и восстанавливающей силой, в результате чего из измеренного хода пружины путем деления на так называемый коэффициент жесткости пружины можно определить восстанавливающую силу. Тем самым за счет регулирования определенного хода пружины можно выставить, например, отрегулировать требуемую восстанавливающую силу. В настоящем случае тем самым посредством регулировки заданного расстояния между обоими передаточными элементами можно произвести регулировку нужной силы пружины и, следовательно, приводного усилия на инструменте. Это справедливо также при использовании нелинейных пружин, при которых существует нелинейная взаимосвязь между ходом пружины и силой пружины.
В исполнении изобретения пружина выполнена в виде винтовой пружины, которая расположена вокруг крепежного элемента, то есть через ее полое внутреннее пространство проходит крепежный элемент, который соединяет первый и второй передаточные элементы и ограничивает возможное расстояние между первым и вторым передаточными элементами. Тем самым несложным образом достигают направления и фиксации пружин и одновременно реализуют соединение отдельных передаточных элементов. Крепежный элемент выполнен, в частности, в виде винта с головкой винта и штоком. Один из передаточных элементов, например, первый передаточный элемент, содержит ступенчатое сквозное отверстие, выполненное таким образом, что шток может быть проведен через отверстие, а головка винта может прилегать к уступу. Второй передаточный элемент содержит резьбовое отверстие, в которое ввинчен шток винта. Таким образом, винт соединяет оба передаточных элемента и за счет взаимодействия головки винта с уступом сквозного отверстия ограничивает расстояние между обоими передаточными элементами. Одновременно возможно движение обоих передаточных элементов в направлении друг к другу.
В исполнении изобретения датчик расстояния элемента для измерения расстояния расположен стационарно относительно первого передаточного элемента и элемент для измерения расстояния измеряет расстояние до второго передаточного элемента. Элемент для измерения расстояния содержит наряду с датчиком расстояния, в частности, также блок оценки, который расположен также стационарно относительно первого передаточного элемента. Датчик расстояния и блок оценки могут быть объединены в один узел или располагаться отдельно друг от друга. За счет стационарного соединения с первым передаточным элементом датчик расстояния соединен также стационарно с механической рукой, что позволяет обеспечить надежное соединение с механической рукой.
В исполнении изобретения элемент для измерения расстояния содержит оптический датчик расстояния, который базируется, в частности, на измерении расстояния с помощью лазерного луча. Такого рода элементы для измерения расстояния имеют, с одной стороны, простую конструкцию и, несмотря на это, являются весьма точными. Кроме того, они имеются в свободной продаже на рынке в большом количестве и разнообразных исполнениях.
В исполнении изобретения первый и второй передаточный элементы соединены с помощью направляющей. Направляющая выполнена и расположена таким образом, что перемещение обоих передаточных элементов друг к другу возможно только в направлении приведения в действие, причем возможно присутствующим люфтом в направляющей пренебрегают. Тем самым достигают того, что при движении механической руки в направлении приведения в действие перемещение инструмента происходит также лишь в направлении приведения в действие и не происходит нежелательного движения поперечно направлению приведения в действие. Это важно для использования некоторых инструментов, например, сверлильного станка или винтоверта.
В простейшем случае названная направляющая образована укрепленным на одном из передаточных элементов и ориентированном в направлении приведения в действие штифтом и выполненной на другом передаточном элементе сообщающейся выемке, в которую штифт может быть погружен с минимальным зазором.
В исполнении изобретения направляющая содержит по меньшей мере один сепаратор шарикоподшипника, который расположен параллельно направлению приведения в действие между обоими передаточными элементами. Сепаратор шарикоподшипника состоит из имеющего, в частности, форму полого цилиндра базового элемента с выемками, в которых отдельные шарики расположены с возможностью свободного качения и выступают наружу и вовнутрь за пределы базового элемента. За счет этого достигают особо точного направления при малом трении. Это обеспечивает, с одной стороны, весьма точное движение инструмента в направлении приведения в действие и, с другой стороны, точную регулировку, например, регулировку желаемого расстояния между обоими отклоняющими элементами и, следовательно, желаемого приводного усилия.
В этом случае направляющая содержит наряду с сепаратором шарикоподшипника расположенную на одном из передаточных элементов и ориентированную в направлении приведения в действие направляющую штангу с цилиндрической формой и расположенную на другом передаточном элемента, имеющую форму полого цилиндра направляющую втулку, в которую может быть вставлена направляющая штанга. Между направляющей штангой и направляющей втулкой расположен сепаратор шарикоподшипника.
В исполнении изобретения соединительный элемент содержит амортизатор, который демпфирует передаваемые через инструмент удары. Демпфирование ударов оказывает щадящее воздействие на конструктивные элементы соединительного элемента и механической руки и улучшает, в частности, возможность настройки или регулирования расстояния между обоими передаточными элементами.
Амортизатор выполнен, например, в виде одного или нескольких параллельно расположенных резиновых буферов, которые в большом выборе и по невысокой цене могут быть приобретены на рынке. Однако, возможно также, что амортизатор выполнен в виде телескопического амортизатора.
Соединительный элемент вместо комбинации из обоих передаточных элементов с возвратным элементом и амортизатором может содержать также лишь один амортизатор. Такого рода соединительный элемент может быть использован в том случае, если регулировка приводного усилия не является обязательно необходимой, однако, демпфирование ударов в направлении приведения в действие необходимо для щадящей эксплуатации конструктивных элементов. Такого рода соединительный элемент может быть использован, например, для соединения с перфоратором. При сверлении перфоратором возникают сильные удары, причем, однако, регулировка определенного приводного усилия не является обязательно необходимой.
В исполнении изобретения амортизатор расположен с силовым замыканием между винтовертом и присоединительным элементом, который обеспечивает возможность присоединения к механической руке. За счет расположения амортизатора с силовым замыканием между винтовертом и присоединительным элементом достигают особо эффективного демпфирования. Под расположением с силовым замыканием в данном случае следует понимать то, что амортизатор принимает воздействующую на винтоверт силу и передает ее далее на присоединительный элемент и, таким образом, на механическую руку.
В исполнении изобретения амортизатор содержит направляющую, которая выполнена и расположена таким образом, что деформация амортизатора поперечно направлению приведения в действие невозможна, причем возможно присутствующим в направляющей люфтом пренебрегают. Таким образом, направляющая допускает деформацию амортизатора лишь в направлении приведения в действие и/или за счет вращения вокруг направления приведения в действие. Если инструмент выполнен в качестве перфоратора, то важно, в частности, демпфирование в направлении приведения в действие. При исполнении инструмента в виде ударного винтоверта важно, в частности, демпфирование в указанном направлении вращения.
Тем самым достигают того, что при движении механической руки в направлении приведения в действие перемещение инструмента происходит также лишь в направлении приведения в действие, и также не выполняется нежелательное движение поперечно направлению приведения в действие. Это важно для использования некоторых инструментов, например, сверлильного станка или винтоверта.
Если амортизатор выполнен в виде телескопического амортизатора, то под погружением поршневого штока в цилиндр телескопического амортизатора следует понимать также деформацию амортизатора.
В исполнении изобретения амортизатор расположен относительно второго передаточного элемента на расположенной напротив первого передаточного элемента стороне и, таким образом, на стороне инструмента перед вторым передаточным элементом. За счет этого передаваемые через инструмент удары поступают на второй передаточный элемент уже демпфированными, в результате чего измерение расстояния и, следовательно, регулировка нужного расстояния подвержены мешающему воздействию в минимальной мере и, следовательно, могут быть выполнены с весьма высокой точностью.
Соединительный элемент мог бы быть также соединен с различными инструментами. За счет этого соединительный элемент мог бы использоваться весьма гибко. В частности, он мог бы быть выполнен таким образом, чтобы быть соединенным с обычными, приводимыми в действие вручную инструментами, например, винтовертами или сверлильными станками. Опционально соединительный элемент может быть оснащен переходными элементами, согласованными со специальной формой рукоятки инструмента. Наряду с возможностью гибкого использования это позволяет добиться рентабельного преобразования, так как указанные инструменты имеются в продаже в большом количестве и по сравнительно низким ценам.
Возможно также, что соединительный элемент образует с инструментом неразъемный узел, который служит специально для одной цели использования и оптимизирован для нее.
В исполнении изобретения соединительный элемент содержит быстросменное присоединение. Оно выполнено таким образом, что соединительный элемент с помощью быстросменного присоединения может быть соединен с механической рукой без ручного вмешательства. Таким образом механическую руку можно быстро и несложным образом соединять с различными соединительными элементами и, тем самым, различными инструментами. В результате этого механическая рука может автоматически выполнять различные работы с использованием различных инструментов без ручного вмешательства оператора. Это обеспечивает возможность особо гибкого и также рентабельного использования механической руки.
Быстросменное присоединение можно приводить в действие, например, пневматически, причем путем нагружения сжатым воздухом может быть установлено соединение с геометрическим замыканием между механической рукой и соединительным элементом. Такого рода быстросменные присоединения известны и имеются на рынке.
Указанная задача решается посредством ввинчивания винта в стену с помощью направляемого механической рукой винтовертного устройства, причем винтовертное устройство подают с приводным усилием в направлении приведения в действие в направлении стены, при направлении винтовертного устройства в направлении стены определяют величину, характеризующую приводное усилие, и винтовертное устройство приводят в действие таким образом, что указанная величина лежит внутри определяемого диапазона и, в частности, является неизменной. Названный способ позволяет осуществлять надежное ввинчивание винта, при котором, с одной стороны, во время комплексного процесса ввинчивания надежно сохраняется контакт между винтовертным устройством и винтом, а с другой стороны, опасность заклинивания и, следовательно, блокировки винта весьма мала.
Под названным приведением в действие винтовертного устройства в этой взаимосвязи следует понимать как направление, то есть перемещение винтовертного устройства, в частности, в направлении стены, так и заданное число оборотов винтовертного устройства и, таким образом, вращаемого винтовертным устройством винта.
Посредством резьбы винта вращающийся винт самостоятельно перемещается внутрь крепежного отверстия. При недостаточно быстром следовании винтовертного устройства может быть потерян контакт между винтовертным устройством и винтом и возникнуть необходимость в новом насаживании винтовертного устройства. С одной стороны, это отнимает время и в данном случае при направляемом механической рукой винтовертном устройстве может быть реализовано лишь с большими расходами. Если винтовертное устройство перемещают в отношении числа оборотов винтовертного устройства и, следовательно, числа оборотов винта слишком быстро в направлении крепежного отверстия и, следовательно, в направлении приведения в действие, то приводное усилие может оказаться слишком большим и может произойти заклинивание винта и блокирование ввинчивания. В этом случае необходимо прервать ввинчивание и, возможно, вывернуть винт на некоторое расстояние назад. Это также занимает, с одной стороны, время и в настоящем случае при направляемом механической рукой винтовертном устройстве может быть реализовано лишь с большими расходами.
Было установлено, что при соответствующем изобретению определении величины, характеризующей приводное усилие, и при приведении винтовертного устройства в действие таким образом, что названная величина лежит в пределах определяемого диапазона и при соответствующем выборе названного диапазона могут быть устранены названные выше проблемы и винт может быть ввинчен точно и надежно. Названный диапазон зависит от некоторых факторов, например, используемого инструмента, типа винтов и особенностей стены. Он может быть выбран, например, таким образом, что приводное усилие составляет от 20 Н до 100 Н, в частности, около 50 Н.
Регулировка названной величины может быть осуществлена посредством измерения направления, то есть изменения позиции винтовертного устройства и, следовательно, механической руки. В случае, если приводное усилие становится слишком большим, то винтовертное устройство перемещают, например, в направлении стены с меньшей скоростью. Альтернативно этому настройку названной величины можно производить путем изменения числа оборотов винтовертного устройства и, следовательно, числа оборотов винта. За счет изменения числа оборотов изменяется также скорость, с которой винт движется в направлении стены. Если приводное усилие слишком велико, то в этом случае увеличивают число оборотов и винт перемещают в направлении стены с большей скоростью, в результате чего при равномерном движении винтовертного устройства в направлении стены происходит уменьшение приводного усилия. При слишком малом приводном усилии число оборотов уменьшают. Возможно также изменение как направления винтовертного устройства, так и его числа оборотов. Регулировку названной величины производят, в частности, с помощью системы регулирования, узкоспециально с помощью системы пропорционально-интегрального и дифференциального регулирования.
Характеризующую приводное усилие величину можно представить, например, в виде хода пружины, расположенной между механической рукой и винтовертным устройством. Однако, возможны также и другие величины.
Под винтовертным устройством или винтовертом в этой взаимосвязи следует понимать машину, в частности, с электрическим приводом, которая может быть соединена с головкой винта и с помощью которой винт может быть приведен во вращение.
Винт ввинчивают, в частности, в крепежное отверстие в форме сверленого отверстия в стене. Винт может быть выполнен, например, в качестве так называемого винтового анкера или винтового дюбеля, которые могут быть ввинчены непосредственно и, таким образом, без предварительного введения дюбеля в крепежное отверстие. Однако, представляются возможными также и другие виды винтов.
В отношении используемой в соответствующем изобретению способе механической руки действуют исполнения, описанные выше во взаимосвязи с соединительным элементом.
Соединение между механической рукой и винтовертным устройством обеспечивают с помощью описанного выше соединительного элемента, а в качестве характеризирующей приводное усилие величины используют расстояние, измеренное устройством для измерения расстояний.
Соответствующий изобретению способ может быть использован, в частности, при фиксации держателя частей лифта в шахте лифта. Держатель частей лифта выполнен, в частности, в виде нижней части рельсовых обойм, на которой может крепиться верхняя часть рельсовых обойм, на которой затем крепят рельсовый проводник для кабины лифта. Держатель частей лифта можно использовать, однако, также для крепления других конструктивных частей, например, рельсового проводника противовеса в шахте лифта. Удерживаемая держателем частей лифта конструктивная часть лифта может быть непосредственно или в соответствии с описанной при использовании промежуточной частью соединена с держателем частей лифта. Способ фиксации держателя частей лифта в шахте лифта описан в европейской заявке на патент с номером заявки 15193501.2, содержание которой тем самым присоединено к этой заявке.
Дальнейшие преимущества, признаки и подробности изобретения вытекают из последующего описания примеров исполнения, а также на основании чертежей, на которых одинаковые или одинаковые по функции элементы оснащены идентичными ссылочными обозначениями.
При этом фигуры показывают:
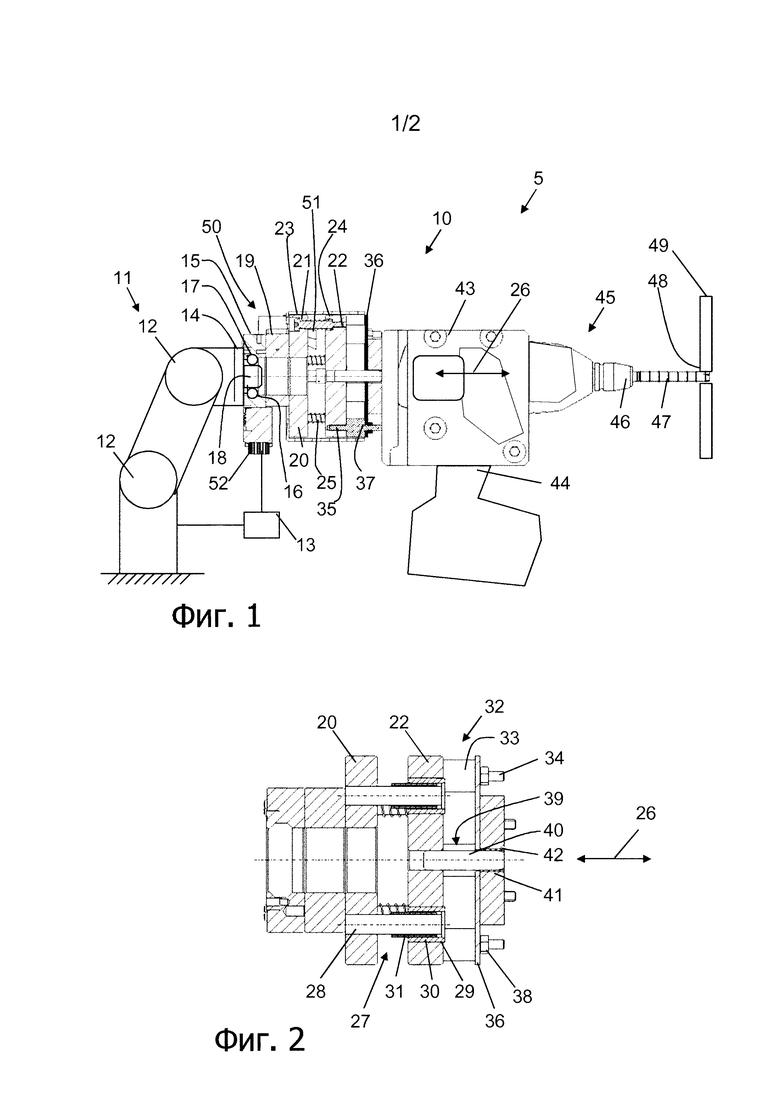
фиг. 1 - винтовертное устройство, соединенное с механической рукой;
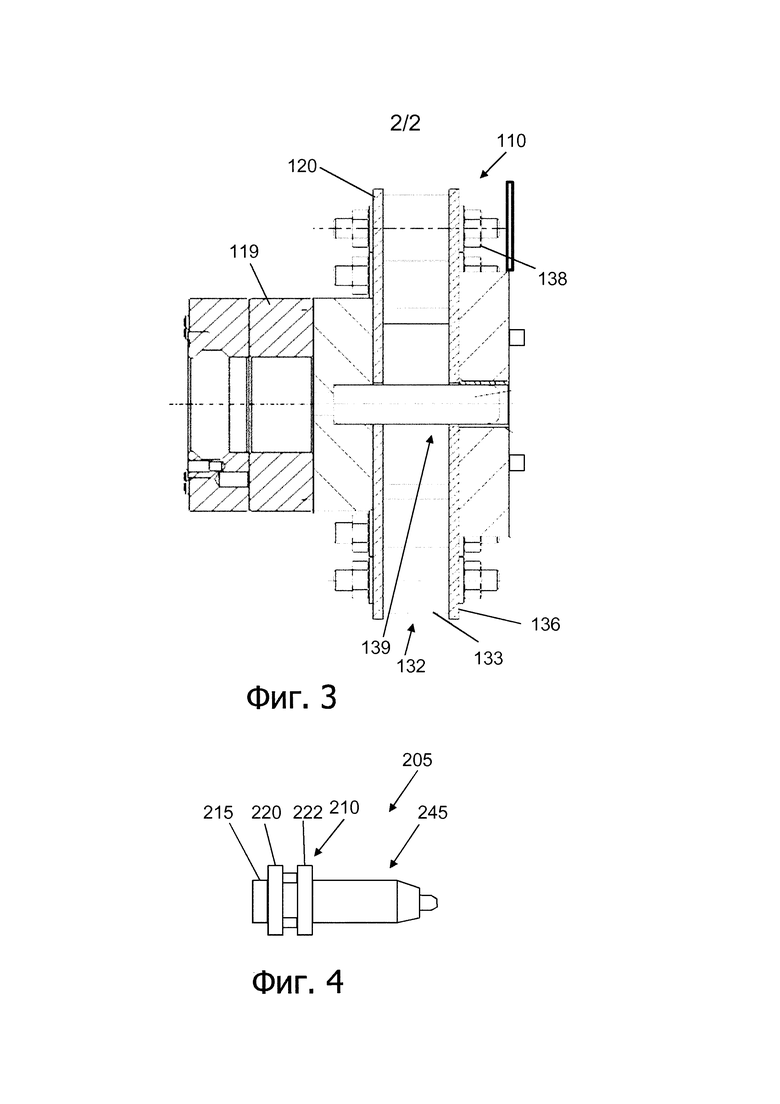
фиг. 2 - соединительный элемент винтовертного устройства из фиг. 1 в повернутом на 90° сечении;
фиг. 3 - соединительный элемент в упрощенной форме исполнения; и
фиг. 4 - второй пример исполнения винтовертного устройства.
В соответствии с фиг. 1 соединительный элемент 10 соединен с механической рукой 11, которая в этом упрощенном изображении содержит лишь два сочленения 12. Управление механической рукой 11 производят с помощью системы 13 управления робота, в результате чего она может с регулированием перемещаться в различные позиции. Конструкция и принцип действия механических рук и систем управления роботов являются общеизвестными и не нуждаются здесь в дальнейшем рассмотрении.
На механической руке 11 расположено находящееся на стороне робота первое быстросменное присоединение 14 системы быстрой смены, которая взаимодействует с расположенным на стороне соединительного элемента, вторым быстросменным присоединением 15 соединительного элемента 10. Второе быстросменное присоединение 15 выполнено главным образом в форме полого цилиндра и содержит внутренний окружный паз 16, в который могут входить в зацепление шарики 17, соединенные посредством не изображенного более подробно сепаратора на первом быстросменном присоединении 14. Кроме того, первое быстросменное присоединение 14 содержит приводимый в действие сжатым воздухом плунжер 18, который может выдвигаться в направлении соединительного элемента 10 и вдвигаться в противоположном направлении. При выдвижении в направлении соединительного элемента 10 шарики 17 вдавливаются в паз 16 второго быстросменного соединения 15 и таким образом возникает соединение с геометрическим замыканием между обоими быстросменными присоединениями 14, 15 и, тем самым, между механической рукой 11 и соединительным элементом 10.
В результате этого происходит соединение механической руки 11 с соединительным элементом 10. При необходимости повторного разъединения плунжер 18 вновь двигают и шарики 17 могут вновь перемещаться внутрь и покидать паз 16. После этого механическая рука 11 может быть отведена от соединительного элемента 10 и отделена от него. Описанное соединение и отсоединение может осуществляться в полностью автоматическом режиме без ручного вмешательства рабочего или оператора.
Ко второму быстросменному присоединению 15 примыкает выполненный главным образом в форме полого цилиндра промежуточный элемент 19, который на противолежащей стороне соединен с первым, расположенным на стороне робота передаточным элементом 20. Первый передаточный элемент 20 также выполнен в форме полого цилиндра и с помощью в общей сложности шести крепежных элементов в форме винтов 21 соединен со вторым, расположенным на стороне инструмента передаточным элементом 22. Второй передаточный элемент 22 выполнен также главным образом в форме полого цилиндра и расположен соосно первому передаточному элементу 20. Из в общей сложности шести равномерно распределенных винтов 21 на показанном в сечении изображении видны только три.
Для обеспечения соединения обоих передаточных элементов 20, 22 и одновременного обеспечения возможности движения обоих передаточных элементов 20, 22 в направлении друг к другу первый передаточный элемент 20 содержит ступенчатые сквозные отверстия 23, через которые проходит шток винтов 21, а головка винта прилегает к уступу. Сквозные отверстия 23 имеют настолько большой диаметр, что первый передаточный элемент 20 может перемещаться относительно штоков винтов. Второй передаточный элемент 22 содержит сообщающиеся резьбовые отверстия 24, в которые частично ввинчены винты 21.
Винты 21 в комбинации со ступенчатыми сквозными отверстиями 23 и резьбовыми отверстиями 24 ограничивают, тем самым, возможное расстояние между обоими передаточными элементами 20, 22. Между обоими передаточными элементами 20, 22 и вокруг штоков винтов 21 соответственно расположен возвратный элемент в форме линейной винтовой пружины 25, так что передаточные элементы 20, 22 могут перемещаться в направлении друг к другу против восстанавливающей силы винтовых пружин 25 в направлении приведения в действие.
Оба передаточных элемента 20, 22 дополнительно соединены с помощью направляющей 27, которая более детально показана на фиг. 2. Направляющая 27 состоит из имеющей форму цилиндра направляющей штанги 28, которая стационарно соединена с первым передаточным элементом 20 и ориентирована в направлении 26 приведения в действие. Второй передаточный элемент 22 содержит выемку 29, в которой расположена направляющая втулка 30, имеющая форму полого цилиндра. Выемка 29 и направляющая втулка 30 расположены таким образом, что направляющая штанга 28 может быть погружена в направляющую втулку 30. Между направляющей штангой 28 и направляющей втулкой 30 расположен параллельный направлению 26 приведения в действия сепаратор 31 шарикоподшипника, который катится как по направляющей штанге 28, так и направляющей втулке 30. Тем самым направляющая 27 обеспечивает возможность перемещения обоих передаточных элементов 20, 22 друг к другу лишь в направлении 26 приведения в действие. Соединительный элемент 10 содержит две идентичным образом выполненных направляющих 27.
На противоположной от первого передаточного элемента 20 стороне ко второму передаточному элементу 22 примыкает амортизатор 32, который демпфирует удары, проводимые через инструмент 45. Амортизатор содержит в общей сложности шесть равномерно распределенных резиновых буферов 33, в которые на обеих сторонах внедрены заливкой ориентированные в направлении 26 приведения в действие резьбовые штифты 34. Резиновые буферы 33 ввинчены в сообщающиеся резьбовые отверстия 35 во втором передаточном элементе 22. К другой стороне примыкает элемент 36 крышки со сквозными отверстиями 37, через которые проходит соответственно один резьбовой штифт 34 резинового буфера 33. Элемент 36 крышки зафиксирован на резиновых буферах 33 с помощью навинченных на резьбовые штифты 34 гаек 38. Амортизатор 32 содержит направляющую 39, которая препятствует деформации резиновых буферов 33 поперечно направлению 26 приведения в действие. Для этого направляющая 39 содержит ориентированный в направлении приведения в действие штифт 40, который стационарно соединен со вторым передаточным элементом 22 и с выполненной на элементе 36 крышки сообщающейся выемкой 41, в которую штифт 40 может быть погружен с возможностью вращения вокруг направления 26 приведения в действие. Кроме того, в выемке 41 расположена скользящая втулка 42.
На противолежащей второму передаточному элементу 22 стороне элемент 36 крышки стационарно соединен с переходным элементом 43. Переходной элемент 43 имеет не изображенный внутренний контур, который выполнен сообщающимся с рукояткой 44 инструмента в форме приводимого в действие вручную винтоверта 45. Переходной элемент 42 можно открывать и вновь закрывать после размещения винтоверта 45. Тем самым винтоверт 45 может быть неподвижно соединен с переходным элементом 43, однако, возможна также замена инструмента. Соединительный элемент 10 и винтоверт 45 образуют в совокупности винтовертное устройство 5. Амортизатор 32 расположен с силовым замыканием между винтовертом 45 и вторым быстросменным присоединением 15. Второе быстросменное присоединение 15 можно рассматривать в качестве соединительного элемента, обеспечивающего возможность присоединения винтовертного устройства 5 к механической руке 11.
Возможно также, что винтовертное устройство не содержит амортизатора.
На острие 46 винтоверта 45 укреплен ориентированный в направлении 26 приведения в действие винт 47 с не изображенной шестигранной головкой. С помощью винтоверта 45 винт 47 может быть ввинчен в крепежное отверстие 48 в стене 49. Винт 47 выполнен, в частности, в качестве винтового анкера, который может быть ввинчен непосредственно и без использования дюбеля.
Для ввинчивания винта 47 механическая рука 11 может прикладывать через соединительный элемент 10 приводное усилие в направлении 26 приведения в действие к винтовертному устройству 5 или винтоверту 45 и, тем самым, к винту 47. Для регулировки приводного усилия соединительный элемент 10 содержит элемент 50 для измерения расстояния, который расположен на промежуточном элементе 19 и, следовательно, стационарно напротив первого передаточного элемента 20. Датчик 51 расстояния элемента 50 для измерения расстояния, который может излучать и принимать лазерный луч, выровнен в направлении 26 приведения в действие относительно второго передаточного элемента 22, в результате чего элемент 50 для измерения расстояния может измерять расстояние от датчика 51 расстояния до второго передаточного элемента 22. Вследствие стационарного расположения элемента 50 для измерения расстояния и датчика 51 расстояния относительно первого передаточного элемента 20 из этого может быть определено расстояние между обоими передаточными элементами 20, 22, так что измеренное расстояние характеризует расстояние между обоими передаточными элементами 20, 22 в направлении приведения в действие.
Элемент 50 для измерения расстояния передает измеренное расстояние через сигнальное присоединение 52 далее на систему 13 управления робота. Система 13 управления робота может управлять работой механической руки 11 и винтоверта 45 и, тем самым, приводить в действие соединительный элемент 10, включая винтоверт 45, таким образом, что измеренное расстояние лежит в пределах заданного диапазона и, в частности, является неизменным. Регулировку можно осуществлять, например, с помощью ПИД-регулятора, причем в качестве установочной величины для ПИД-регулятора служит либо скорость винтоверта 45 в направлении стены 49, то есть в направлении 26 приведения в действие, либо число оборотов винтоверта 45. Поскольку оба передаточных элемента 20, 22 могут перемещаться друг к другу лишь против восстанавливающей силы винтовых пружин 25, на основании измеренного расстояния можно сделать непосредственное заключение о действующем на винтоверт 45 приводном усилии, посредством чего путем регулировки измеренного расстояния косвенно происходит регулировка приводного усилия. Названный диапазон может быть выбран, например, таким образом, что приводное усилие составляет от 20 Н до 100 Н, в частности, около 50 Н. Подлежащее для этого регулировке расстояния зависит при этом от размеров и расположения отдельных конструктивных частей соединительного элемента 10 и, в частности, также от коэффициентов жесткости винтовых пружин 21.
Фиг. 3 показывает соединительный элемент 110 в форме исполнения, упрощенной относительно соединительного элемента 10 из фиг. 1. Соединительный элемент 110 имеет схожую с соединительным элементом 10 конструкцию, в связи с чем рассмотрены лишь различия в соединительных элементах 10, 110.
Соединительный элемент 110 не содержит два способных перемещаться по отношению друг к другу передаточных элемента. Вместо двух передаточных элементов соединительный элемент 110 содержит лишь один передаточный элемент 120, который стационарно соединен с промежуточным элементом 119. Между передаточным элементом 120 и элементом 136 крышки расположены резиновые буферы 133, которые зафиксированы гайками 138. Таким образом, резиновые буферы 133 являются составными частями амортизатора 132, который также содержит направляющую 139.
На фиг. 4 показано винтовертное устройство 205 с винтовертом 245 и соединительным элементом 210, при котором используется специальный винтоверт 245, который не предусмотрен для направления от руки. Винтовертное устройство 205 весьма схоже по конструкции с винтовертным устройством 5 из фиг. 1, в связи с чем рассмотрены лишь различия винтовертных устройств.
Винтоверт 245 не оснащен рукояткой, через которую обеспечивается соединение с соединительным элементом 210. Более того, винтоверт 245 непосредственно соединен со вторым передаточным элементом 222. Второй передаточный элемент 222, как и в случае соединительного элемента 10 винтовертного устройства 5 из фиг. 1, соединен с первым передаточным элементом 220, который на противоположной стороне соединен со вторым быстросменным присоединением 215. Таким образом, винтовертное устройство 205 не содержит амортизатора.
Изобретение относится к винтовертному устройству (5) с винтовертом (45) и соединительным элементом (10) для соединения винтоверта (45) с механической рукой (11). Соединительный элемент (10) содержит первый, расположенный на стороне робота передаточный элемент (20), второй, расположенный на стороне инструмента передаточный элемент (22), расположенный между первым и вторым передаточными элементами (20, 22) возвратный элемент (25) и элемент (50) для измерения расстояния. Оба передаточных элемента (20, 22) могут перемещаться друг к другу против восстанавливающей силы возвратного элемента (25) в направлении (26) приведения в действие. Элемент (50) для измерения расстояния выполнен и расположен таким образом, что он может измерять расстояние, характеризующее расстояние между передаточными элементами (20, 22) в направлении (26) приведения в действие. Технический результат заключается в надежном ввинчивании винта. 2 н. и 11 з.п. ф-лы, 4 ил.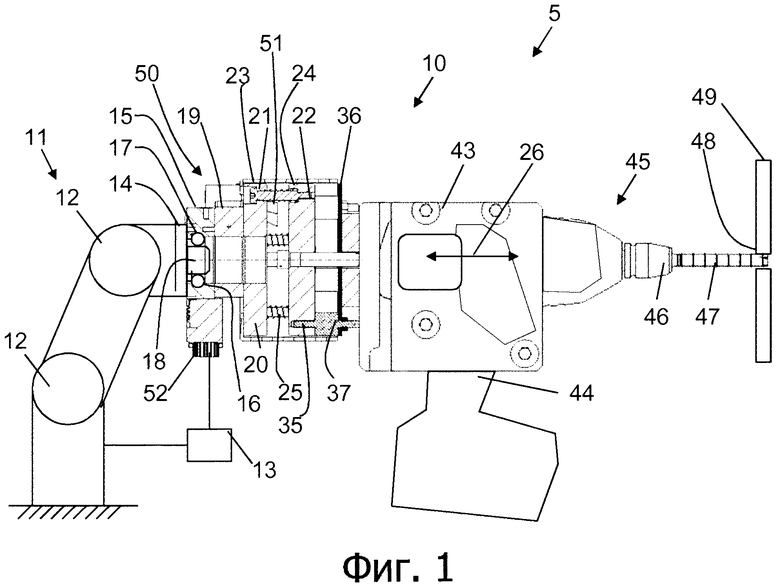
1. Винтовертное устройство, выполненное с винтовертом (45, 245) и соединительным элементом (10, 210) для соединения винтоверта (45) с механической рукой (11),
причем соединительный элемент (10, 210) содержит:
первый, расположенный на стороне робота, передаточный элемент (20),
второй, расположенный на стороне инструмента, передаточный элемент (22),
возвратный элемент (25), расположенный между первым и вторым передаточными элементами (20, 22), и
элемент (50) для измерения расстояния,
причем оба передаточных элемента (20, 22) соединены с помощью направляющей (27), которая выполнена и расположена таким образом, что перемещение обоих передаточных элементов (20, 22) против восстанавливающей силы возвратного элемента (25) друг к другу возможно только в направлении (26) приведения в действие, и элемент (50) для измерения расстояния выполнен и расположен таким образом, что он может измерять расстояние, характеризующее расстояние между передаточными элементами (20, 22) в направлении (26) приведения в действие.
2. Винтовертное устройство по п.1, отличающееся тем, что возвратный элемент (25) соединительного элемента (10) выполнен в виде, по меньшей мере, одной пружины (25).
3. Винтовертное устройство по п.2, отличающееся тем, что пружина (25) выполнена в виде винтовой пружины (25), которая расположена вокруг крепежного элемента (21), который соединяет первый и второй передаточные элементы (20, 22) и ограничивает возможное расстояние между первым и вторым передаточными элементами (20, 22).
4. Винтовертное устройство по любому из пп.1-3, отличающееся тем, что датчик (51) расстояния элемента (50) для измерения расстояния соединительного элемента (10) расположен стационарно относительно первого передаточного элемента (20) и элемент (50) для измерения расстояния измеряет расстояние до второго передаточного элемента (22) соединительного элемента (10).
5. Винтовертное устройство по любому из пп.1-4, отличающееся тем, что элемент (50) для измерения расстояния содержит оптический датчик (51) расстояния.
6. Винтовертное устройство по п.5, отличающееся тем, что направляющая (27) содержит, по меньшей мере, один сепаратор (31) шарикоподшипника, расположенный параллельно направлению (26) приведения в действие между обоими передаточными элементами (20, 22).
7. Винтовертное устройство по любому из пп.1-6, отличающееся тем, что соединительный элемент (10) содержит амортизатор (32).
8. Винтовертное устройство по п.7, отличающееся тем, что амортизатор (32) расположен с силовым замыканием между винтовертом (45) и присоединительным элементом (15, 215), который обеспечивает возможность присоединения к механической руке (11).
9. Винтовертное устройство по п.7, отличающееся тем, что амортизатор (32) содержит направляющую (39), которая выполнена и расположена таким образом, что предотвращается деформация амортизатора (32) поперечно направлению (26) приведения в действие.
10. Винтовертное устройство по п.7 или 8, отличающееся тем, что амортизатор (32) расположен относительно второго передаточного элемента (22) на стороне, расположенной напротив первого передаточного элемента (20).
11. Винтовертное устройство по любому из пп.1-10, отличающееся тем, что соединительный элемент (10, 210) содержит быстросменное присоединение (15, 215), которое выполнено таким образом, что соединительный элемент (10) через быстросменное присоединение (15) может быть соединен с механической рукой (11) без ручного вмешательства.
12. Способ ввинчивания винта (47) в стену (49) с помощью винтовертного устройства (5, 205) по любому из пп.1-11, которое направляют механической рукой (11), причем
винтовертное устройство (5, 205) направляют с приводным усилием в направлении (26) приведения в действие в направлении стены (49), при этом оба передаточных элемента (20, 22) соединены с помощью направляющей (27), которая выполнена и расположена таким образом, что перемещение обоих передаточных элементов (20, 22) против восстанавливающей силы возвратного элемента (25) друг к другу возможно только в направлении (26) приведения в действие, при направлении винтовертного устройства (5, 205) в направлении стены (49) определяют величину, которая характеризует приводное усилие, и
винтовертное устройство (5, 205) приводят в действие таким образом, что указанная величина, характеризующая приводное усилие, лежит внутри определяемого диапазона.
13. Способ по п.12, отличающийся тем, что характеризующую приводное усилие величину регулируют до неизменной величины.
| Винтозавинчивающее устройство | 1984 |
|
SU1177114A1 |
| US 2014135987 A1, 15.05.2014 | |||
| WO 2010024794 A1, 04.03.2010 | |||
| JP 2010264514 A, 25.11.2010 | |||
| Устройство для сборки резьбовых соединений | 1981 |
|
SU1046080A1 |
| Устройство для гашения вибраций в металлорежущем станке | 1981 |
|
SU975327A2 |
| US 4637775 A, 20.01.1987. | |||

