стакан 15, подпружиненный пружиной 16 и зафиксированный от проворота штифтами 17. На стакане 15 расположены направляющие 18с насадкой 19 и упорами
20 и 21. В насадке расположено лезвие отвёртки 22 и наклонный канал 23 для подачи винтов 24, удерживаемых упругими лепестками 26. 2 ил.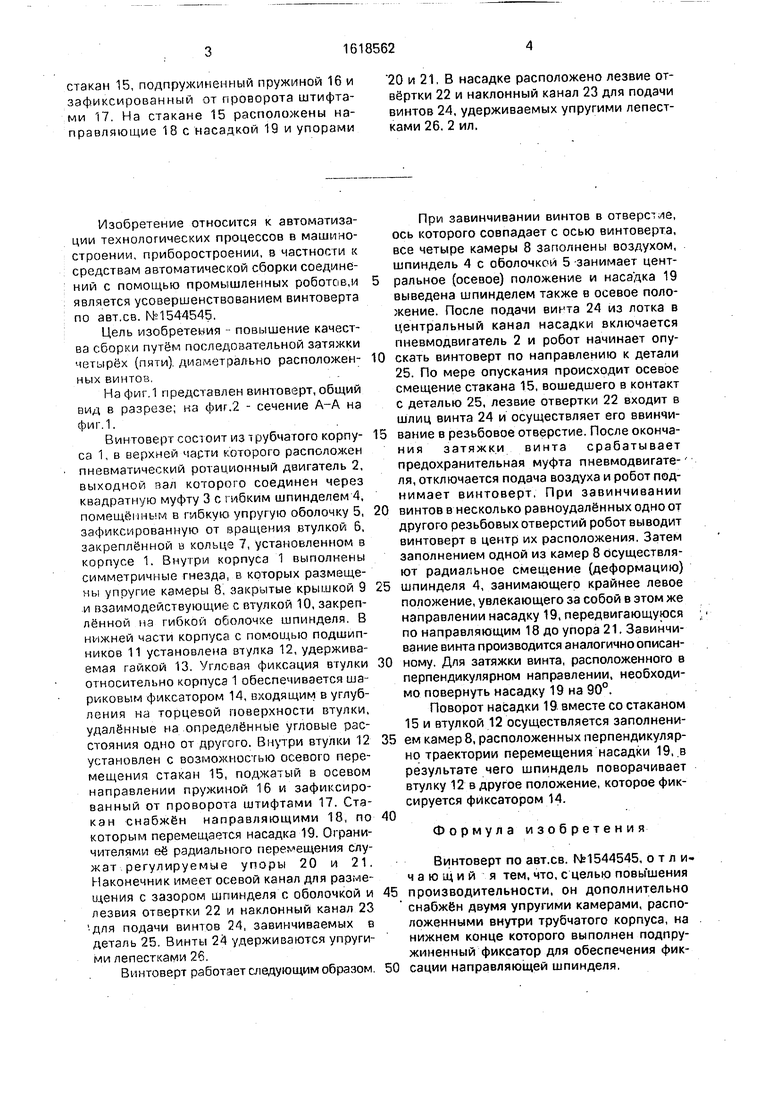
| название | год | авторы | номер документа |
|---|---|---|---|
| Пневматический винтоверт | 1984 |
|
SU1284818A1 |
| Винтоверт | 1983 |
|
SU1118521A1 |
| Винтоверт | 1982 |
|
SU1030154A1 |
| Устройство для сборки крепежных элементов | 1981 |
|
SU973336A1 |
| Пневматический винтоверт | 1983 |
|
SU1113242A1 |
| Винтоверт | 1987 |
|
SU1472204A1 |
| Винтоверт | 1982 |
|
SU1098744A1 |
| Пневматический винтоверт | 1988 |
|
SU1588539A1 |
| Механизм зарядки винтоверта | 1986 |
|
SU1440656A1 |
| Винтоверт | 1983 |
|
SU1093464A1 |
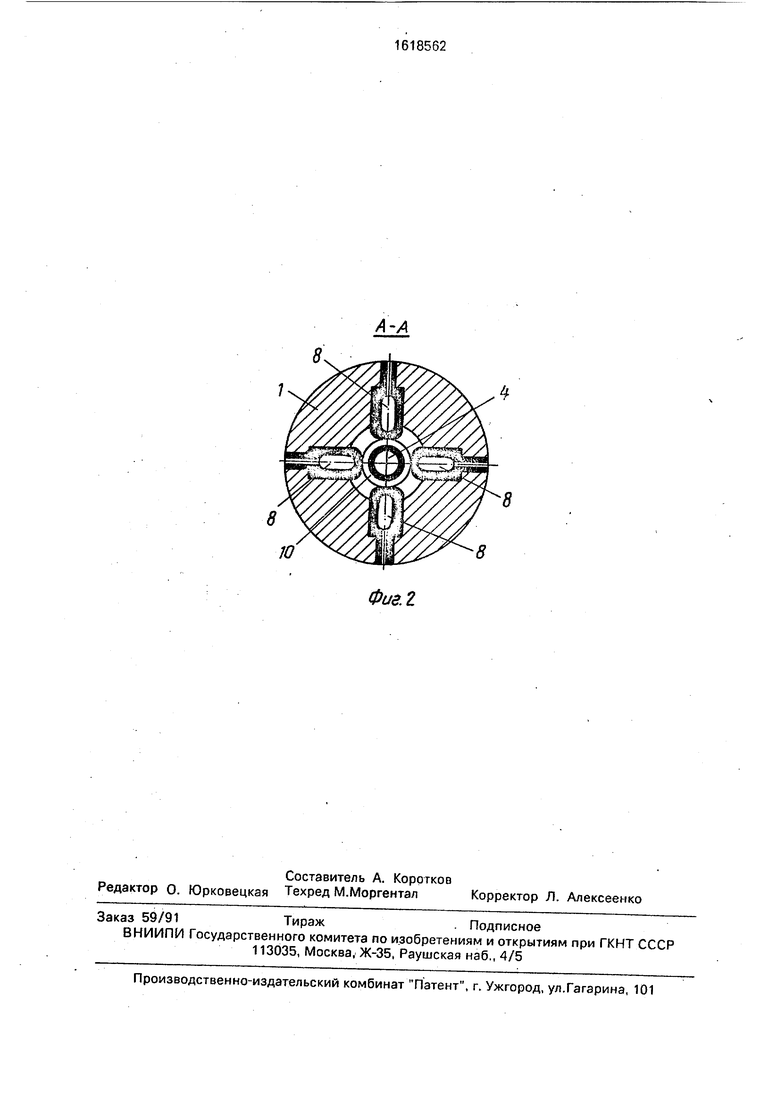
Изобретение относится к области машиностроения, приборостроения и другим областям, где необходима последовательная затяжка винтов. Цель изобретения - повыга шение качества, Винтоверт состоит из корпуса 1, в верхней части которого расположен ротационный пневмодвигатель 2, выходной вал которого соединен через муфту 3 с гибким шпинделем 4, помещённым в гибкую упругую оболочку 5, зафиксированную от вращения втулкой б, закреплённой в кольце 7, установленном в корпусе 1. Внутри корпуса в симметрично расположенных гнёздах размещены упругие камеры 8, закрытые крышкой 9. Между камерами 8 расположена втулка 10, закреплённая на гибкой оболочке шпинделя 4. В нижней части корпуса в подшипниках 11 установлена втулка 12, закреплённая гайкой 13. Между корпусом 1 и втулкой 12 располо-, жен подпружиненный шариковый фиксатор 14. Внутри втулки 12 установлен fe Ј jco К ю to Фиг I
Изобретение относится к автоматизации технологических процессов в машиностроении, приборостроении, в частности к средствам автоматической сборки соединений с помощью промышленных роботов,и является усовершенствованием винтоверта по авт.св. №1544545.
Цель изобретения - повышение качества сборки путём последовательной затяжки четырёх (пяти), диаметрально расположенных винтов.На фиг.1 представлен винтоверт, общий вид в разрезе; на фиг.2 - сечение А-А на фиг.1, . ..
Винтоверт состоит из трубчатого корпуса 1, в верхней части которого расположен пневматический ротационный двигатель 2, выходной зал которого соединен через квадратную муфту Зс гибким шпинделем 4, помещённым в гибкую упругую оболочку 5, зафиксированную от втулкой 6, закреплённой в кольце 7, установленном в корпусе 1. Внутри корпуса 1 выполнены симметричные гнезда, в которых размещены упругие камеры 8, закрытые крышкой 9 .и взаимодействующие с втулкой 10, закреплённой на гибкой оболочке шпинделя, В нижней части корпуса с помощью подшипников 11 установлена втулка 12, удерживаемая гайкой 13. Угловая фиксация втулки относительно корпуса 1 обеспечивается шариковым фиксатором 14, входящим в углубления на торцевой поверхности втулки, удалённые на определённые угловые расстояния одно от другого. Внутри втулки 12 установлен с возможностью осевого перемещения стакан 15, поджатый в осевом направлении пружиной 16 и зафиксированный от проворота штифтами 17. Стакан снабжён направляющими 18, по которым перемещается насадка 19. Ограничителями её радиального перемещения служат , регулируемые упоры 20 и 21. Наконечник имеет осевой канал для размещения с зазором шпинделя с оболочкой и лезвия отвертки 22 и наклонный канал 23 для подачи винтов 24, завинчиваемых в деталь 25. Винты 24 удерживаются упругими лепестками 26.
Винтоверт работает следующим образом.
При завинчивании винтов в отверстие, ось которого совпадает с осью винтоверта, все четыре камеры 8 заполнены воздухом, шпиндель 4 с оболочкой 5 -занимает центральное (осевое) положение и насадка 19 выведена шпинделем также в осевое положение. После подачи винта 24 из лотка в центральный канал насадки включается пневмодвигатель 2 и робот начинает опуекать винтоверт по направлению к детали 25. По мере опускания происходит осевое смещение стакана 15, вошедшего в контакт с деталью 25, лезвие отвертки 22 входит в шлиц винта 24 и осуществляет его ввинчивание в резьбовое отверстие. После окончания затяжки винта срабатывает предохранительная муфта пневмодвигате- ля, отключается подача воздуха и робот под- нимает винтоверт. При завинчивании
винтов в несколько равноудалённых одно от другого резьбовых отверстий робот выводит винтоверт в центр их расположения. Затем заполнением одной из камер 8 осуществляют радиальное смещение (деформацию)
шпинделя 4, занимающего крайнее левое положение, увлекающего за собой в этом же направлении насадку 19, передвигающуюся по направляющим 18 до упора 21. Завинчивание винта производится аналогично описанному. Для затяжки винта, расположенного в перпендикулярном направлении, необходимо повернуть насадку 19 на 90°.
Поворот насадки 19. вместе со стаканом 15 и втулкой 12 осуществляется заполнением камер 8, расположенных перпендикулярно траектории перемещения насадки 19, .в результате чего шпиндель поворачивает втулку 12 в другое положение, которое фиксируется фиксатором 14.
Формула изобретения
Винтоверт по авт.св. №1544545, о т л и- ч а ю щ и и я тем, что, с целью повышения производительности, он дополнительно снабжён двумя упругими камерами, расположенными внутри трубчатого корпуса, на нижнем конце которого выполнен подпружиненный фиксатор для обеспечения фик- сации направляющей шпинделя.
Ю
В
Фие.2
| Винтозавинчивающее устройство | 1984 |
|
SU1177114A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
| Винтозавертывающее устройство | 1986 |
|
SU1544545A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
