Изобретение относится к способам использования автономных необитаемых подводных аппаратов (АНПА), а точнее к способам обеспечения их энергоэффективности.
При задании выполнения миссии АНПА на большом удалении от базы остро стоит вопрос экономного расходования энергии его аккумуляторной батареи (АБ) (либо другого источника энергии). Одной из наиболее энергозатратных систем АНПА является гидроакустическая система освещения обстановки (ГСОО), которая при движении АНПА по заданному маршруту обеспечивает навигационную безопасность АНПА, т.е. своевременное обнаружение неподвижных и подвижных навигационных препятствий и выдачу данных по ним в систему управления (СУ) АНПА. Поскольку неподвижные навигационные препятствия, как правило, не излучают гидроакустические шумы и сигналы, их обнаружение возможно только в активном режиме работы ГСОО. Подвижные навигационные препятствия (подводные лодки, надводные корабли, АНПА) могут обнаруживаться как в активном, так и в пассивном режиме работы ГСОО. Поскольку работа и того, и другого режима работы ГСОО сопряжена с расходованием запаса электроэнергии АБ, актуален поиск путей уменьшения времени их работы.
В качестве прототипа выберем систему освещения ближней обстановки (СОБО) подводной лодки, описанную в работе [Корякин Ю.А., Смирнов С.А., Яковлев Г.В. Корабельная гидроакустическая техника. Состояние и актуальные проблемы. - СПб.: Наука, 2004], одной из задач которой является обнаружение неподвижных и подвижных навигационных препятствий в активном и пассивном режимах работы. Пассивный и активный режимы в СОБО работают непрерывно, период излучения зондирующих сигналов (ЗС) в активном режиме рассчитывается по формуле:

где ΔТЗС - период излучения ЗС;
Rш - выбранная шкала освещаемой дальности;
Сзв - среднегоризонтальная скорость распространения ЗС в текущих гидроакустических условиях.
Решаемая техническая проблема - повышение энергоэффективности использования АНПА.
Технический результат - сокращение расхода заряда АБ за счет сокращения времени работы ГСОО в активном и пассивном режимах без сокращения качества работы гидроакустической системы освещения обстановки.
Указанный технический результат достигается тем, что работа ГСОО адаптируется к текущим характеристикам маршрута по критерию минимума потребляемой электроэнергии. Источниками информации для адаптации являются:
- цифровая навигационная карта маршрута, заложенная в память СУ АНПА;
- текущие счислимые координаты АНПА;
- вычисленное исходя из характеристик района и навигационных средств АНПА текущее максимальное отклонение истинного места АНПА от счислимого, ΔRmax;
- вычисленная исходя из измеренного вертикального распределения скорости звука среднегоризонтальная скорость распространения ЗС, Сзв;
- минимальное расстояние до навигационного препятствия, на котором АНПА должен начать маневр расхождения с ним, Rmin;
- вычисленная для текущих гидроакустических условий минимальная дистанция обнаружения опасных подвижных объектов Dобн/min и максимальная скорость сближения с ними Vсбл/max.
Применительно к активному режиму работы ГСОО адаптация осуществляется следующим образом:
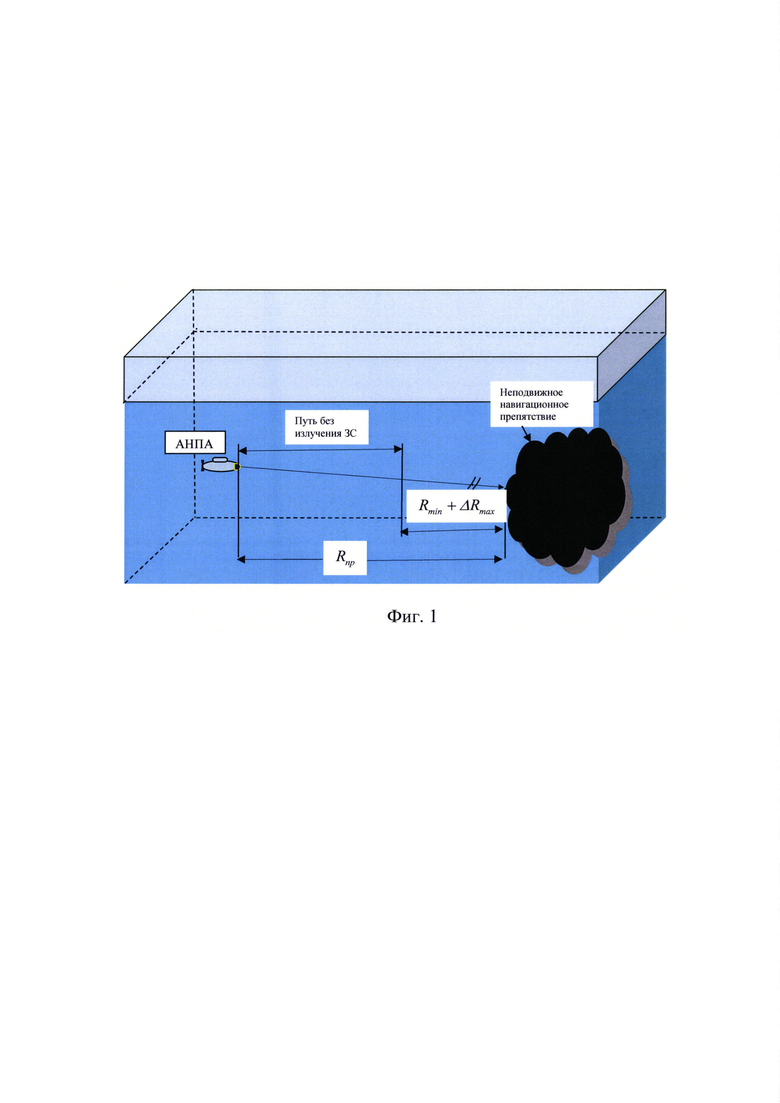
1) С использованием цифровой карты периодически (раз в 5-10 минут) определяется расстояние Rпр впереди по курсу АНПА до ближайшего неподвижного навигационного препятствия (береговая черта, опасные возвышенности подводного рельефа и др.).
2) С тем же периодом вычисляется время ΔТАР, в течение которого АНПА может плыть без использования активного режима работы ГСОО:

где VАНПА - текущая скорость АНПА. Иллюстрация формулы (2) приведена на фиг. 1, из которой видно, что АНПА может сближаться с навигационным препятствием до расстояния Rmin (с учетом возможной ошибки определения текущего места АНПА).
3) Если ΔТАР>0, АНПА движется без использования активного режима работы ГСОО.
4) Как только величина ΔТАР приблизилась к нулю, СУ АНПА по формуле

где Rш/max - максимальная шкала освещаемой дальности в активном режиме работы ГСОО, рассчитывает период излучения ЗС и дает команду на включение активного режима работы ГСОО на максимальной шкале освещаемой дальности.
5) При обнаружении препятствия система управления рассчитывает параметры маневра уклонения и в нужный момент дает команду на его выполнение.
Применительно к пассивному режиму работы ГСОО экономия электроэнергии достигается за счет периодического прослушивания окружающего пространства в течение нескольких минут. Интервал времени между последовательными включениями пассивного режима рассчитывается по формуле:

Проведенный расчет показал, что на типовых протяженных маршрутах движения АНПА экономия использования электроэнергии, расходуемой на обеспечение работы ГСОО, за счет применения заявляемого способа составляет до 80%.
Таким образом, заявленный технический результат - сокращение расхода заряда АБ за счет сокращения времени работы ГСОО в активном и пассивном режимах без сокращения качества работы гидроакустической системы освещения обстановки - можно считать достигнутым.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ обзора пространства гидролокатором обеспечения безопасности плавания автономного необитаемого подводного аппарата | 2019 |
|
RU2725706C1 |
| Автономный необитаемый подводный аппарат | 2019 |
|
RU2722258C1 |
| Способ позиционирования подводных аппаратов | 2019 |
|
RU2717161C1 |
| СИСТЕМА ОСВЕЩЕНИЯ ПОДВОДНОЙ ОБСТАНОВКИ | 2016 |
|
RU2648546C1 |
| СПОСОБ ЗАЩИТЫ ОХРАНЯЕМОЙ АКВАТОРИИ ОТ ПОДВОДНЫХ ДИВЕРСАНТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2269449C1 |
| СПОСОБ ОХРАНЫ ВОДНОГО РАЙОНА | 2016 |
|
RU2668494C2 |
| Способ и система для навигационного обеспечения судовождения и определения координат | 2021 |
|
RU2773497C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ НАЧАЛЬНЫХ КООРДИНАТ АВТОНОМНОГО НЕОБИТАЕМОГО ПОДВОДНОГО АППАРАТА | 2016 |
|
RU2629916C1 |
| Способ позиционирования подводных аппаратов при плавании по постоянному маршруту | 2022 |
|
RU2785215C1 |
| СПОСОБ ОСВЕЩЕНИЯ ПОДВОДНОЙ ОБСТАНОВКИ | 2014 |
|
RU2578807C2 |
Изобретение относится к способам использования автономных необитаемых подводных аппаратов (АНПА), а точнее к способам обеспечения их энергоэффективности. Способ использования АНПА, позволяющий экономить запас электроэнергии АНПА, оборудованного навигационной системой и гидроакустической системой освещения обстановки (ГСОО), работающей в активном и пассивном режимах, заключается в том, что с использованием счислимых навигационной системой координат АНПА и цифровой карты система управления (СУ) АНПА периодически определяет расстояние до ближайшего неподвижного навигационного препятствия впереди по курсу от своего текущего места, с тем же периодом СУ вычисляет время, в течение которого АНПА может двигаться без использования активного режима работы ГСОО, и следит за динамикой изменения значения времени, пока оно остается больше нуля, в противном случае СУ вычисляет период излучения зондирующих сигналов в активном режиме работы ГСОО и дает команду на включение активного режима ГСОО, при обнаружении неподвижного препятствия СУ рассчитывает параметры маневра уклонения и в нужный момент дает команду на его выполнение, одновременно с описанными действиями СУ рассчитывает интервал времени между последовательными включениями пассивного режима ГСОО и в соответствии с этим интервалом периодически дает команды на включение пассивного режима работы ГСОО. Технический результат – повышение энергоэффективности использования АНПА, сокращение расхода заряда аккумуляторной батареи АБ за счет сокращения времени работы ГСОО в активном и пассивном режимах без сокращения качества работы ГСОО. 1 ил.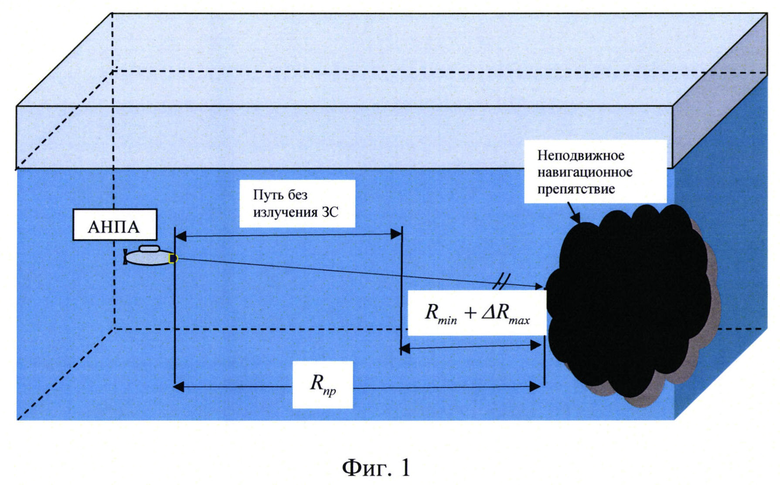
Способ использования автономного необитаемого подводного аппарата (АНПА), позволяющий экономить запас электроэнергии АНПА, оборудованного навигационной системой и гидроакустической системой освещения обстановки (ГСОО), работающей в активном и пассивном режимах, отличающийся тем, что с использованием счислимых навигационной системой координат АНПА и цифровой карты система управления (СУ) АНПА периодически определяет расстояние Rпр до ближайшего неподвижного навигационного препятствия впереди по курсу от своего текущего места, с тем же периодом СУ по формуле  где ΔRmax - максимально возможное отклонение истинного места АНПА от счислимого, Rmin - минимальное расстояние до навигационного препятствия, на котором АНПА должен начать маневр расхождения с ним, VАНПА - текущая скорость АНПА, вычисляет время ΔТАР, в течение которого АНПА может двигаться без использования активного режима работы ГСОО, и следит за динамикой изменения значения времени ΔТАР, пока оно остается больше нуля, в противном случае СУ по формуле
где ΔRmax - максимально возможное отклонение истинного места АНПА от счислимого, Rmin - минимальное расстояние до навигационного препятствия, на котором АНПА должен начать маневр расхождения с ним, VАНПА - текущая скорость АНПА, вычисляет время ΔТАР, в течение которого АНПА может двигаться без использования активного режима работы ГСОО, и следит за динамикой изменения значения времени ΔТАР, пока оно остается больше нуля, в противном случае СУ по формуле  где Rш/max - максимальная шкала освещаемой дальности в активном режиме работы ГСОО, вычисляет период излучения зондирующих сигналов в активном режиме работы ГСОО ΔТЗС и дает команду на включение активного режима ГСОО, при обнаружении неподвижного препятствия СУ рассчитывает параметры маневра уклонения и в нужный момент дает команду на его выполнение, одновременно с описанными действиями СУ по формуле
где Rш/max - максимальная шкала освещаемой дальности в активном режиме работы ГСОО, вычисляет период излучения зондирующих сигналов в активном режиме работы ГСОО ΔТЗС и дает команду на включение активного режима ГСОО, при обнаружении неподвижного препятствия СУ рассчитывает параметры маневра уклонения и в нужный момент дает команду на его выполнение, одновременно с описанными действиями СУ по формуле  где Dобн/min - минимальная дистанция обнаружения опасных подвижных объектов, Vсбл/max - максимальная скорость сближения с опасными подвижными объектами, рассчитывает интервал времени ΔТпас между последовательными включениями пассивного режима ГСОО и в соответствии с этим интервалом периодически дает команды на включение пассивного режима работы ГСОО.
где Dобн/min - минимальная дистанция обнаружения опасных подвижных объектов, Vсбл/max - максимальная скорость сближения с опасными подвижными объектами, рассчитывает интервал времени ΔТпас между последовательными включениями пассивного режима ГСОО и в соответствии с этим интервалом периодически дает команды на включение пассивного режима работы ГСОО.
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ НАЧАЛЬНЫХ КООРДИНАТ АВТОНОМНОГО НЕОБИТАЕМОГО ПОДВОДНОГО АППАРАТА | 2016 |
|
RU2629916C1 |
| Способ навигации и позиционирования подводных объектов в глубоководном канале на больших дальностях и система для его осуществления | 2018 |
|
RU2674404C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ШУМЯЩИХ ОБЪЕКТОВ В МЕЛКОМ И ГЛУБОКОМ МОРЕ | 2017 |
|
RU2653189C1 |
| DE 102015118819 A1, 04.05.2017. | |||

