Изобретение относится к способам использования автономных необитаемых подводных аппаратов (АНПА), а точнее к способам обеспечения их энергоэффективности.
При задании миссии АНПА на большом удалении от базы остро стоит вопрос экономного расходования энергии его аккумуляторной батареи (АБ) (либо другого источника энергии). Одной из наиболее энергозатратных систем АНПА является гидролокатор обеспечения безопасности плавания (ГОБП), который при движении АНПА по заданному маршруту обеспечивает навигационную безопасность АНПА, т.е. своевременное обнаружение неподвижных и подвижных навигационных препятствий и выдачу данных по ним в систему управления АНПА.
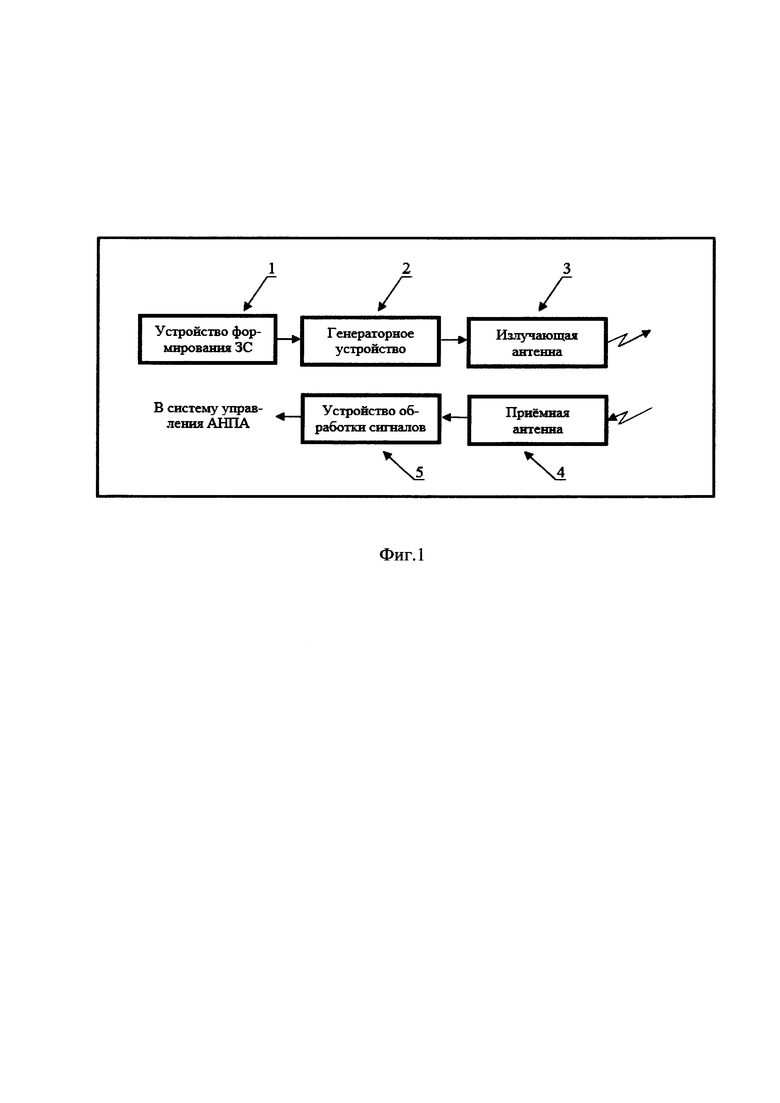
ГОБП оборудован (фиг. 1) излучающей 3 и приемной 4 антеннами (как правило, многоэлементными), генераторным устройством 2 (ГУ), устройством формирования зондирующих сигналов 1 (ЗС) и устройством обработки сигналов 5 с выхода элементов приемной антенны 4. Работа ГОБП включает:
- формирование ЗС устройством формирования ЗС;
- излучение ЗС при помощи ГУ и излучающей антенны в заданном секторе углов в горизонтальной и вертикальной плоскости;
- прием отраженных от цели сигналов элементами приемной антенны;
- формирование характеристик направленности приемной антенны, образующих пеленгационный рельеф;
- обнаружение эхосигналов в пеленгационном рельефе.
В качестве прототипа выберем способ обзора пространства в системе освещения ближней обстановки (СОБО) подводной лодки, описанной в работе [Корякин Ю.А., Смирнов С.А., Яковлев Г.В. Корабельная гидроакустическая техника. Состояние и актуальные проблемы. СПб.: Наука, 2004] и предназначенной для обнаружения неподвижных и подвижных навигационных препятствий в активном режиме работы.
Обзор пространства в СОБО осуществляется путем периодического излучения ЗС в заданном секторе курсовых углов. Период излучения ЗС в СОБО рассчитывается по формуле:

где ΔТЗС - период излучения ЗС;
Rш - выбранная шкала освещаемой дальности;
Сзв - среднегоризонтальная скорость распространения ЗС в текущих гидроакустических условиях.
Недостатком способа-прототипа является большой расход СОБО электроэнергии АБ.
Решаемая техническая проблема - повышение энергоэффективности использования АНПА.
Технический результат - сокращение энергопотребления ГОБП.
Указанный технический результат достигается оптимизацией использования оборудования ГОБП в зависимости от решаемой задачи. Конкретнее имеется в виду следующее. На ГОБП возлагается решение двух во многом противоречивых задач:
- обнаружение навигационных препятствий на максимальной дальности;
- наблюдение объектов с высоким разрешением в интересах их классификации на малых дальностях.
Для решения первой задачи работа ГОБП должна вестись на низкой частоте, обеспечивающей малое затухание сигнала. Для решения второй задачи работа ГОБП должна осуществляться на высокой частоте, обеспечивающей высокое разрешение по углу наблюдения.
Данное противоречие при использовании одной и той же аппаратуры ГОБП может быть разрешено следующим образом:
- генераторное устройство и излучающая антенна должны быть спроектированы на излучение ЗС на нескольких (как минимум, двух) частотах, разнесенных друг от друга на октаву;
- конструкция приемной антенны должна быть оптимальной для наибольшей частоты излучения, в частности, для обеспечения минимального уровня боковых лепестков характеристики направленности расстояние между элементами приемной антенны должно быть не более половины длины волны на наибольшей частоте излучения [Смарышев М.Д. Направленность гидроакустических антенн. Л.: Судостроение, 1973]. При этом элементы приемной антенны должны иметь полосу частот, позволяющую принимать эхосигналы на всех излучаемых частотах с учетом полосы частот ЗС и возможного доплеровского смещения частоты эхосигнала. Кроме того, должна быть предусмотрена возможность отключения отдельных элементов приемной антенны (т.е. прекращение подачи на них электропитания);
- для обнаружения навигационных препятствий на максимальной дальности излучение ЗС осуществляется на наименьшей частоте, обеспечивающей малое затухание ЗС при распространении до препятствия и обратно. При этом при формировании характеристик направленности используется только часть элементов приемной антенны, а именно элементы, отстоящие друг от друга на расстояние, равное половине длины волны на частоте излучения. Количество таких элементов составляет долю от общего количества элементов приемной антенны, равную отношению наибольшей и наименьшей частот излучения. Элементы приемной антенны, не задействованные в формировании характеристик направленности, в интересах сокращения энергопотребления отключаются;
- для наблюдения объектов с высоким разрешением в интересах их классификации на малых дальностях излучение ЗС осуществляется на наибольшей частоте, но при сокращенной мощности излучения, рассчитываемой исходя из фактической дистанции до объекта по формуле [Урик Р. Дж. Основы гидроакустики. - Л.: Судостроение, 1978]:

где Wэл - электрическая мощность излучения, Вт;
Qпор - пороговое для обнаружения отношение сигнал/помеха на выходе коррелятора;
Rоб - фактическая дистанция до объекта, км;
Рпом - давление суммарной помехи в полосе ЗС, Па;
β - коэффициент пространственного затухания на частоте ЗС, дБ/км;
γизл, γпр - коэффициент концентрации излучающей и приемной антенны соответственно;
η - КПД излучающей антенны;
A(Rоб) - аномалия распространения ЗС на дистанции Rоб от приемной антенны.
При этом для формирования характеристик направленности используются сигналы с выхода всех элементов приемной антенны.
В результате использования предлагаемых технических решений относительное уменьшение энергопотребления ГОБП составляет:
- при обнаружении навигационных препятствий на максимальной дальности за счет задействования только части элементов приемной антенны низкочастотного диапазона: 30×(N-1)%, где N - количество частот излучения;
- при наблюдении объектов с высоким разрешением в высокочастотном диапазоне в интересах их классификации на малых дальностях за счет уменьшения мощности излучения пропорционально дальности до объекта (см. выражение 2): [1-(Rоб/Rmax)4]×100%, где Rmax - максимальная дальность обнаружения объекта на наибольшей частоте излучения; Rоб - фактическая дальность до наблюдаемого объекта.
Таким образом, заявленный технический результат - сокращение энергопотребления ГОБП - можно считать достигнутым.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРОАКУСТИЧЕСКАЯ СИСТЕМА | 2012 |
|
RU2501038C1 |
| Способ и система для навигационного обеспечения судовождения и определения координат | 2021 |
|
RU2773497C1 |
| Способ позиционирования подводных аппаратов при плавании по постоянному маршруту | 2022 |
|
RU2785215C1 |
| УСТРОЙСТВО ОПЕРАТИВНОГО ОСВЕЩЕНИЯ ПОДВОДНОЙ ОБСТАНОВКИ В АКВАТОРИЯХ МИРОВОГО ОКЕАНА | 2012 |
|
RU2522168C2 |
| Гидроакустический способ управления торпедой | 2017 |
|
RU2649675C1 |
| Способ отображения гидролокационной информации | 2019 |
|
RU2724245C1 |
| Способ позиционирования подводных аппаратов | 2019 |
|
RU2717161C1 |
| Способ экономии запаса электроэнергии автономного необитаемого подводного аппарата | 2019 |
|
RU2722065C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ПОДВОДНОГО ТРУБОПРОВОДА | 2011 |
|
RU2472178C1 |
| Способ обработки гидролокационной информации | 2018 |
|
RU2694269C1 |
Изобретение относится к способам использования автономных необитаемых подводных аппаратов (АНПА), а точнее к способам обеспечения их энергоэффективности. Решаемая техническая проблема - повышение энергоэффективности использования АНПА. Технический результат - сокращение энергопотребления гидролокатора обеспечения безопасности плавания (ГОБП) АНПА. Указанный технический результат достигается использованием многочастотного гидролокатора и оптимизацией использования оборудования ГОБП в зависимости от решаемой задачи: - для обнаружения навигационных препятствий на максимальной дальности излучение зондирующих сигналов (ЗС) осуществляется на наименьшей частоте, обеспечивающей малое затухание ЗС при распространении до препятствия и обратно. При этом при формировании характеристик направленности используется только часть элементов приемной антенны, а именно элементы, отстоящие друг от друга на расстояние, равное половине длины волны на частоте излучения. Элементы приемной антенны, не задействованные в формировании характеристик направленности, в интересах сокращения энергопотребления отключаются; - для наблюдения объектов с высоким разрешением в интересах их классификации на малых дальностях излучение ЗС осуществляется на наибольшей частоте, но при сокращенной мощности излучения, рассчитываемой исходя из дистанции до объекта. При этом для формирования характеристик направленности используются сигналы с выхода всех элементов приемной антенны. 1 ил.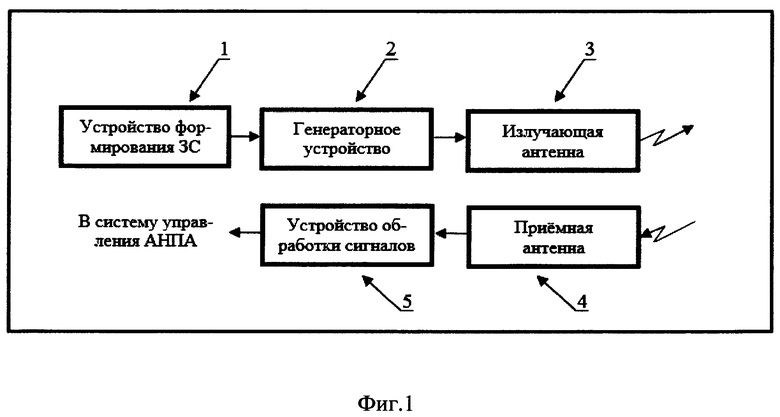
Способ обзора пространства гидролокатором обеспечения безопасности плавания автономного необитаемого подводного аппарата, оборудованным многоэлементными излучающей и приемной антеннами, генераторным устройством, устройством формирования зондирующих сигналов и устройством обработки сигналов с выхода элементов приемной антенны, включающий излучение зондирующих сигналов в заданном секторе обзора, прием отраженных от цели сигналов элементами приемной антенны, формирование характеристик направленности приемной антенны, образующих пеленгационный рельеф, обнаружение эхосигналов в пеленгационном рельефе, отличающийся тем, что излучение зондирующих сигналов осуществляют на одной из фиксированных частот, при этом частота и мощность излучения выбираются в зависимости от предполагаемой дистанции до навигационного препятствия и необходимой разрешающей способности обзора пространства, а формирование характеристик направленности приемной антенны осуществляют с использованием сигналов с выхода только тех элементов приемной антенны, которые обеспечивают минимальный уровень боковых лепестков характеристики направленности приемной антенны.
| СИСТЕМА НАВИГАЦИИ АВТОНОМНОГО НЕОБИТАЕМОГО ПОДВОДНОГО АППАРАТА | 2011 |
|
RU2460043C1 |
| СПОСОБ ЗАЩИТЫ ОХРАНЯЕМОЙ АКВАТОРИИ ОТ ПОДВОДНЫХ ДИВЕРСАНТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2269449C1 |
| Малогабаритный многофункциональный автономный необитаемый подводный аппарат - носитель сменной полезной нагрузки | 2018 |
|
RU2681415C1 |
| СИСТЕМА ОСВЕЩЕНИЯ ПОДВОДНОЙ ОБСТАНОВКИ | 2016 |
|
RU2648546C1 |
| СПОСОБ ВЫСОКОТОЧНОГО КООРДИНИРОВАНИЯ ПОДВОДНОГО КОМПЛЕКСА В УСЛОВИЯХ ПОДЛЕДНОГО ПЛАВАНИЯ | 2013 |
|
RU2555479C2 |
| СПОСОБ НАВИГАЦИИ АВТОНОМНОГО НЕОБИТАЕМОГО ПОДВОДНОГО АППАРАТА | 2013 |
|
RU2563332C2 |

