Изобретение относится к вооружению и военной технике, в частности к системам управления движением различного вида объектов, используемых в качестве мишеней, может быть использовано для обучения и тренировок личного состава стрельбе из стрелкового и артиллерийского вооружения и может существенно повысить боеспособность противотанковых средств сухопутных войск.
Известен способ управления перемещением подвижной мишени, реализованный в устройстве /1/. Способ заключается в перемещении по рельсовым направляющим посредством троса тележки с установленной на ней мишенью. А устройство, соответственно, содержит рельсовые направляющие, тележку с мишенью, тяговый механизм, включающий привод, лебедку и канат/трос, а также пульт управления.
Недостатком данного способа является возможность перемещения мишени только в одном линейном направлении и, таким образом, полная предсказуемость «поведения» мишенного объекта, что существенно снижает уровень подготовки личного состава.
Недостатком же реализующего способ устройства является потребность для его монтажа достаточно длинного и относительно ровного участка местности, большие материальные и трудовые затраты на монтаж, а также ремонт при возможном повреждении рельсовых направляющих средствами поражения, используемыми при тренировочной артиллерийской стрельбе.
Наиболее близкими к предлагаемому изобретению по технической сущности и достигаемому результату являются способ управления перемещением подвижной мишени и устройство для его осуществления /2/.
В предложенном техническом решении - мобильном комплексе для обучения приемам и тактике стрельбы мотострелковых подразделений - управление перемещением подвижной мишени осуществляется посредством приложения к опорным салазкам мишени тягового усилия от лебедки посредством троса.
Устройство для перемещения подвижной мишени содержит реверсивную тросовую лебедку с приводом и выводами троса в сторону мишенного поля, салазки с установленной на них мишенью, имеющие узел зацепления троса, а также комплект аппаратуры управления и связи.
Данный способ, как и вышеописанный /1/, обеспечивает возможность перемещения мишени только в одном линейном направлении, т.е. недостаток, отмеченный в способе-аналоге, не устраняется. Поведение мишени при тренировочной стрельбе также предсказуемо, а это существенно снижает уровень подготовки личного состава.
К недостаткам устройства для осуществления способа /2/, в первую очередь, можно отнести опять-таки его приспособленность, в силу конструктивных характеристик, к перемещению мишени только в одном направлении, невозможность регулирования скорости перемещения и его направления.
Технической задачей предлагаемого изобретения является устранение вышеупомянутых недостатков с целью повышения уровня подготовки личного состава в процессе его обучении и тренировок при стрельбе из стрелкового и артиллерийского вооружения.
Решение поставленной технической задачи достигается тем, что в известном способе управления перемещением подвижной мишени, заключающемся в приложении к опорным салазкам мишени тягового усилия от лебедки посредством троса и последующем перемещении мишени с заданной скоростью, в соответствии с изобретением тяговое усилие к салазкам прилагают попеременно в разных направлениях.
Наиболее простой вариант реализации предложенного решения - когда тяговое усилие к опорным салазкам мишени прилагают посредством совместной регулируемой работы нескольких лебедок, размещаемых в вершинах выпуклой геометрической фигуры, например трех, размещенных в вершинах треугольника.
Реализация предложенного способа, в свою очередь, достигается тем, что в известном устройстве для перемещения подвижной мишени, содержащем реверсивную тросовую лебедку с приводом и выводами троса в сторону мишенного поля, салазки с установленной на них мишенью, имеющие узел зацепления троса, а также комплект аппаратуры управления и связи, в соответствии с изобретением устройство содержит минимум три тросовых лебедки, устанавливаемых с возможностью поворота относительно вертикальной оси, салазки выполнены в виде тарелки с внешней отбортовкой выпуклого криволинейного профиля, в центре которой размещена вертикальная стойка-ось, на которой, в свою очередь, размещены с возможностью поворота вокруг нее минимум три узла зацепления троса, а также платформа для крепления мишени, при этом приводы лебедок выполнены с возможностью бесступенчатого регулирования по частоте и направлению вращения посредством компьютера, дополнительно содержащегося в комплекте аппаратуры управления.
Приложение тягового усилия к салазкам попеременно в разных направлениях посредством совместной регулируемой работы нескольких лебедок, размещаемых в вершинах выпуклой геометрической фигуры, например трех, размещенных в вершинах треугольника, позволяет обеспечить перемещение салазок с мишенью в направлении результирующего вектора скорости, приобретаемого вследствие разнонаправленности векторов тягового усилия при одновременной работе на «тягу» двух лебедок или же непосредственно в направлении вектора «тяги» от одной лебедки. При регулируемом управлении приводами лебедок это позволит осуществлять заданное перемещение салазок с мишенью в пределах всей площади (треугольника) мишенного поля, т.е. мишень при движении можно переместить в любую точку.
Введение в состав устройства минимум трех тросовых лебедок, устанавливаемых с возможностью поворота относительно вертикальной оси, обеспечивает приложение тягового усилия к салазкам одновременно в нескольких направлениях по заданной программе. Предпочтительно - в двух, т.е. когда две лебедки работают на «тягу», а третья - в режиме простого сматывания каната при заданном минимальном его натяжении (вплоть до нулевого). Предлагаемая же возможность поворота лебедок относительно вертикальной оси дает обеспечение постоянства угла сматывания тросов с их барабанов.
Исполнение салазок в виде тарелки с внешней отбортовкой выпуклого криволинейного профиля предусмотрено для того, чтобы обеспечить их перемещение в любом направлении без опрокидывания, а также легко преодолевать при движении возможные препятствия. При достаточно большой площади опорной поверхности салазок будет обеспечено более низкое удельное давление по сравнению с используемыми в настоящее время салазками саночного типа с полозьями, что положительно скажется на их «проходимости» по поверхности площадки полигона/стрельбища и позволит снизить энергозатраты на обеспечение тягового усилия лебедок.
Размещение в центре тарелки (опорной поверхности салазок), т.е. практически на векторе проекции центра масс, вертикальной стойки-оси предусмотрено, в свою очередь, для установки на ней с возможностью свободного поворота вокруг оси минимум трех узлов зацепления троса, а также платформы для крепления мишени. Свободный поворот узлов крепления осуществляется одновременно с поворотом лебедок в соответствии с меняющимся по направлению вектором «тяги» (скорости) от конкретного троса. Поэтому исходная пространственная ориентация опорной поверхности салазок и соответственно закрепленной на ее вертикальной стойке платформы с установленной мишенью при любых перемещениях останется неизменной.
Бесступенчатое регулирование по частоте и направлению вращения посредством компьютера, дополнительно содержащегося в комплекте аппаратуры управления, приводов лебедок в итоге обеспечит управляемое перемещение мишени по заранее определенной программе. При постоянной частоте вращения привода скорость намотки троса на барабан лебедки зависит от диаметра намотки (то же и при сматывании троса). Регулируемый привод позволит обеспечить оптимальные параметры этого процесса для каждой из используемых лебедок вне зависимости от текущего диаметра намотки.
Изобретение поясняется следующей графической информацией.
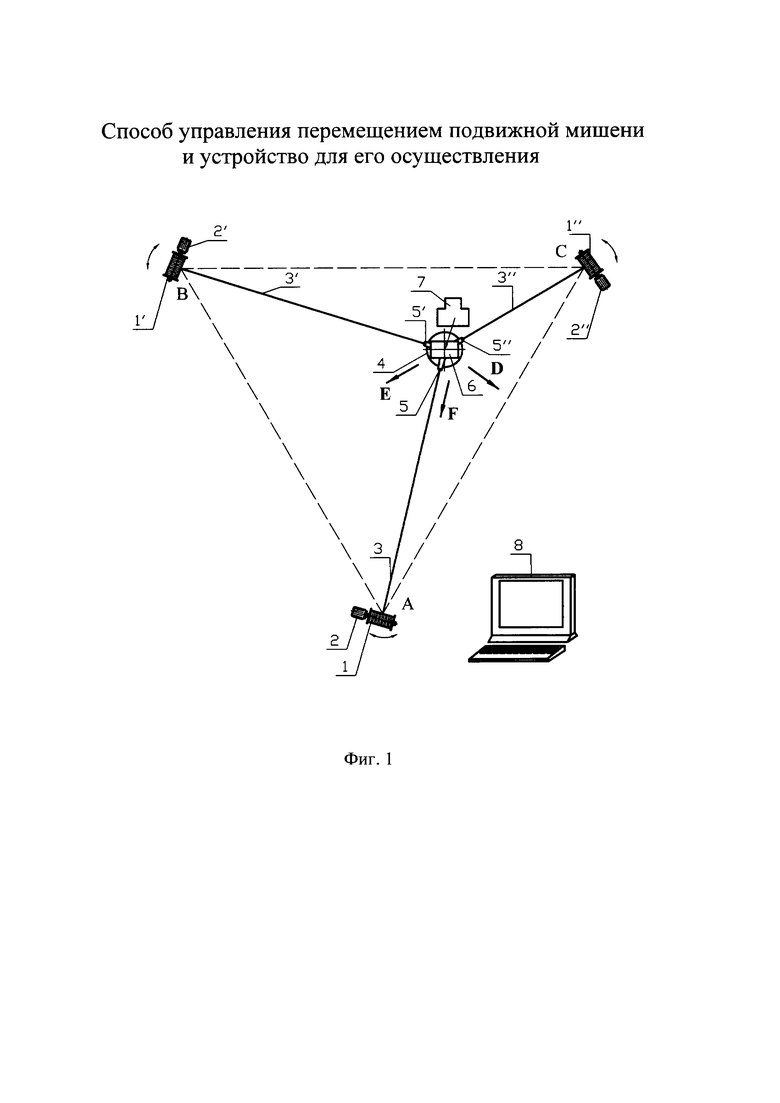
На фиг. 1 изображена принципиальная схема осуществления способа.
На фиг. 2…3 - примеры конструктивного исполнения отдельных сборочных единиц, входящих в комплект устройства для осуществления способа.
В качестве примера осуществления способа и пояснения принципа работы предлагаемого устройства на фиг 1. представлена схема мишенной обстановки в определенный фиксированный момент времени.
Реверсивные тросовые лебедки 1 (1', 1'') с регулируемыми приводами 2 (2', 2'') размещены на мишенном поле в вершинах треугольника ABC. Выводы тросов 3 (3', 3'') от лебедок направлены в сторону мишенного поля и сцеплены с салазками 4 посредством присоединенных к ним узлов зацепления 5 (5', 5''). На салазках также размещена платформа 6 с закрепленной мишенью 7. Управление приводами лебедок осуществляется с помощью введенного в комплект аппаратуры управления и связи компьютера 8 по проводным либо беспроводным линиям (на схеме не показаны). Векторами D, Е, F на схеме показаны возможные перемещения салазок 4 с мишенью 7 по команде управления, переданной с компьютера 8 на приводы лебедок 2 (2', 2'').
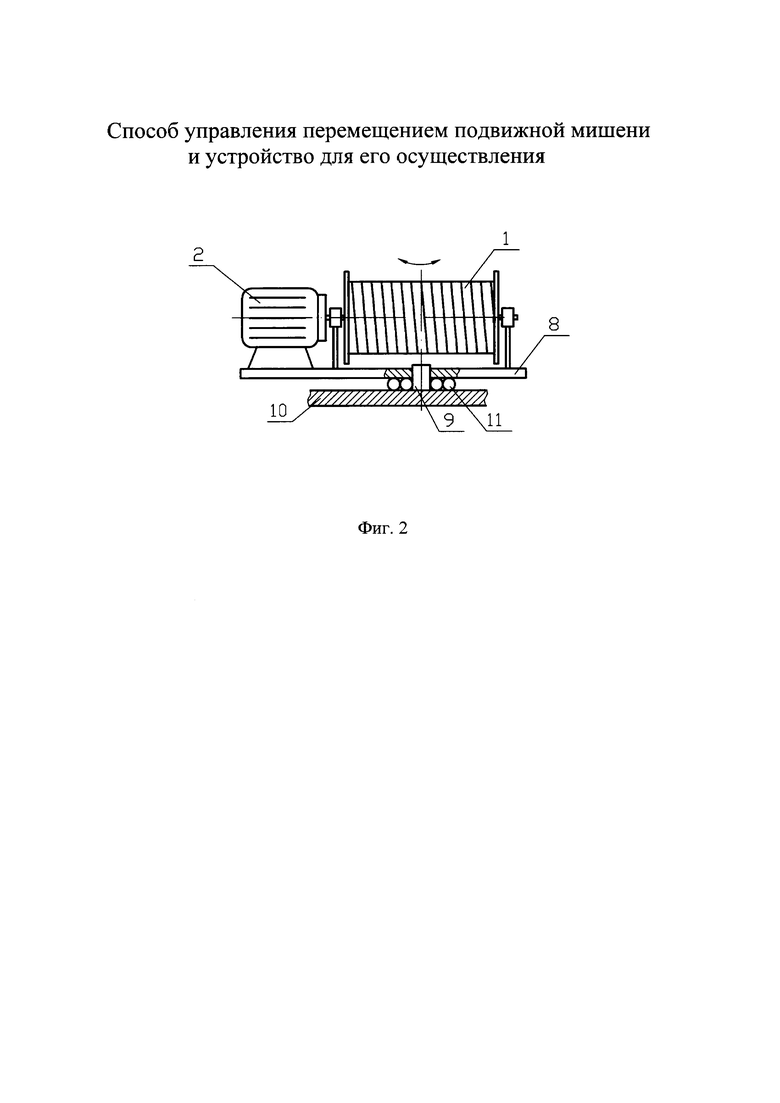
Фиг. 2 иллюстрирует схематичный вариант конструктивного исполнения тросовой лебедки с приводом.
Реверсивная тросовая лебедка 1 совместно с регулируемым приводом 2 смонтированы на общей платформе 8, которая установлена на стойку-ось 9, принадлежащую опорной конструкции 10, фиксированно размещаемой непосредственно на грунте с исключением возможности перемещения и опрокидывания. Возможность свободного поворота лебедки вокруг вертикальной оси при изменении вектора тягового усилия на тросе обеспечивается наличием в конструкции подпятника 11.
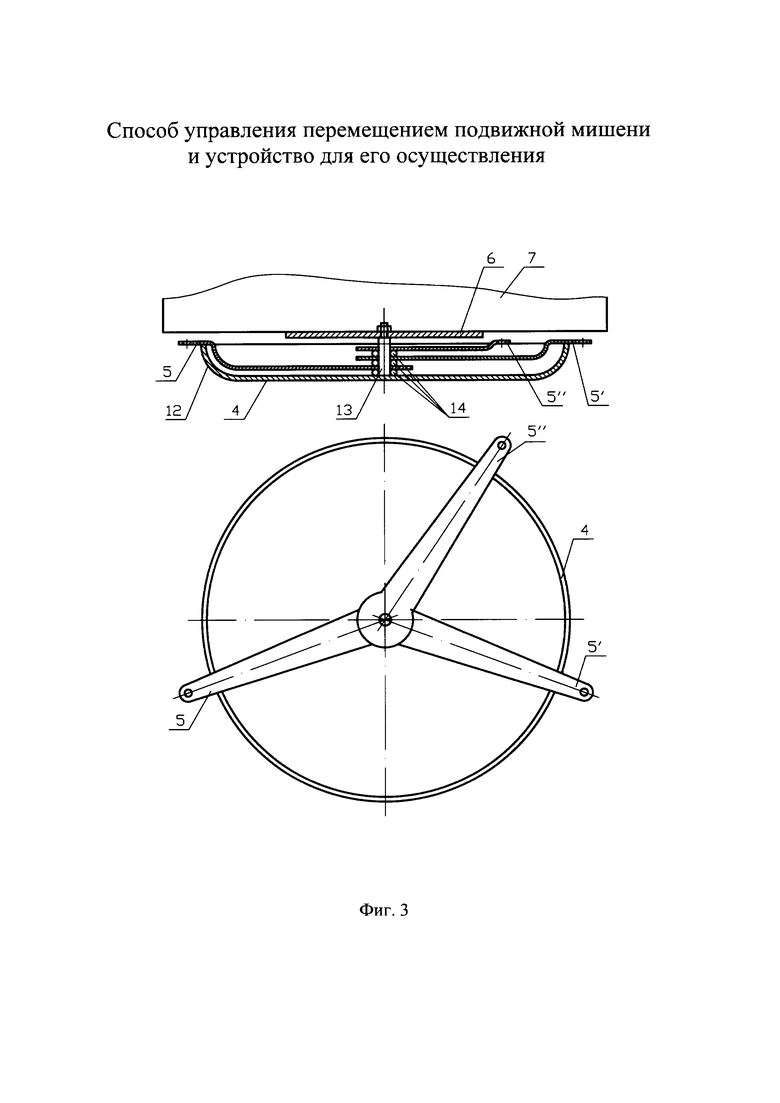
Фиг. 3 иллюстрирует схематичный вариант конструктивного исполнения салазок.
Для упрощения пояснения изображения на виде сверху детали поз. 6, 7 (платформа с закрепленной на ней мишенью) условно не показаны.
Салазки 4 выполнены в виде тарелки с внешней отбортовкой выпуклого криволинейного профиля 12. В центре основания тарелки размещена вертикальная стойка-ось 13, на которую с использованием промежуточных подпятников 14 смонтированы узлы зацепления троса 5 (5', 5''), платформа для крепления мишени 6 и закрепленная на ней мишень 7. Наличие в конструкции системы подпятников 14 обеспечивает возможность свободного поворота узлов зацепления тросов 5 (5', 5'') вокруг вертикальной стойки-оси 13 при изменении направления вектора тягового усилия.
Предложенный способ и работа реализующего его устройства осуществляются следующим образом.
Реверсивные тросовые лебедки 1 (1', 1'') с регулируемыми приводами 2 (2', 2'') размещаются на мишенном поле в вершинах треугольника ABC. Выводы тросов 3 (3', 3'') от лебедок направляются в сторону мишенного поля и сцепляются с салазками 4 посредством присоединенных к ним узлов зацепления 5 (5', 5''). На платформе 6, установленной на салазках 4, закрепляется мишень 7. Компьютером 8 по намеченной программе по проводным либо беспроводным линиям связи осуществляется управление регулируемыми приводами 2 (2', 2'') лебедок 1 (1', 1''), естественно, с учетом получаемой по обратным каналам связи информации с соответствующих датчиков о текущем натяжении тросов, скорости их намотки или сматывания с барабанов лебедок и скорости перемещения салазок 4 и их местоположении. Потребность в наличии подобных датчиков для реализации способа очевидна.
Векторами D, Е, F на схеме показаны возможные направления перемещения салазок 4 с мишенью 7 из текущей позиции по команде управления, переданной с компьютера 8 на приводы лебедок 2 (2', 2'').
Например, при включении приводов лебедок 2 и 2'' на намотку («тягу»), а 2' - на разматывание (съем каната) начальное перемещение из данной точки будет осуществляться в направлении вектора D; при включении приводов 2 и 2' на намотку («тягу»), а 2'' - на разматывание (съем каната) - в направлении вектора Е; при включении только привода 2 на намотку («тягу»), а 2' и 2'' - на разматывание (съем каната) - в направлении вектора F.
Таким образом, посредством компьютерного управления приводами лебедок осуществляется движение салазок с мишенью по «случайной траектории» в границах мишенного поля.
Предложенные способ и устройство для его осуществления позволяют мишени постоянно маневрировать при движении по мишенному полю, что приближает процесс обучения к реальным боевым условиям и может существенно повысить уровень подготовки личного состава в процессе его обучения и тренировок при стрельбе из стрелкового и артиллерийского вооружения.
Так, например, отработка огневых задач по мишеням-имитаторам танков с использованием лазерных имитаторов поражения или же непосредственное решение огневых задач практическими или штатными боеприпасами позволит существенно повысить боеспособность противотанковых средств сухопутных войск.
Источники информации
1) Патент US 20110031695 A1, Moving target system for defensive training, F41J 9/02, 2011.
2) Патент RU 60199(13) U1, Мобильный комплекс для обучения приемам и тактике стрельбы мотострелковых подразделений, F41J 1/18, 2006.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления перемещением подвижной мишени в вертикальной плоскости | 2021 |
|
RU2778375C1 |
| Способ разгрузки на поверхности Луны габаритных полезных грузов с посадочной платформы космического аппарата на лунное транспортное средство и устройства для реализации этого способа | 2024 |
|
RU2837430C1 |
| Наземная мишенная установка типа вертолет | 2018 |
|
RU2725119C2 |
| УСТРОЙСТВО ДЛЯ СПАСЕНИЯ ЛЮДЕЙ | 2014 |
|
RU2552243C1 |
| УСТРОЙСТВО ДЛЯ РАЗРАБОТКИ СКВАЖИНЫ В ГРУНТЕ | 2014 |
|
RU2576063C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ БУРЕНИЯ ВСПОМОГАТЕЛЬНЫХ ШУРФОВ | 2009 |
|
RU2484230C2 |
| УСТРОЙСТВО ДЛЯ ГЛУБОКОВОДНОЙ ДОБЫЧИ ЖЕЛЕЗОМАРГАНЦЕВЫХ КОНКРЕЦИЙ | 1989 |
|
SU1739704A1 |
| Устройство для очистки корпусов судов | 2019 |
|
RU2706267C1 |
| СТРЕЛКОВЫЙ ТРЕНИРОВОЧНЫЙ КОМПЛЕКС | 2013 |
|
RU2530464C1 |
| БАЛАНСИРНАЯ ПОДВЕСКА | 2008 |
|
RU2385236C1 |
Изобретение относится к устройствам для обучения личного состава стрельбе из стрелкового оружия. Минимум три тросовых лебедки установлены с возможностью поворота относительно вертикальной оси. Салазки с установленной на них мишенью выполнены в виде тарелки с внешней отбортовкой выпуклого криволинейного профиля. В центре тарелки размещена вертикальная стойка-ось, на которой, в свою очередь, размещены с возможностью поворота вокруг нее минимум три узла зацепления троса, а также платформа для крепления мишени. Приводы лебедок выполнены с возможностью бесступенчатого регулирования по частоте и направлению вращения посредством компьютера аппаратуры управления. Тяговое усилие к салазкам прикладывают попеременно в разных направлениях. Техническим результатом изобретения является обеспечение возможности регулирования скорости и направления перемещения мишени. 2 н. и 1 з.п. ф-лы, 3 ил.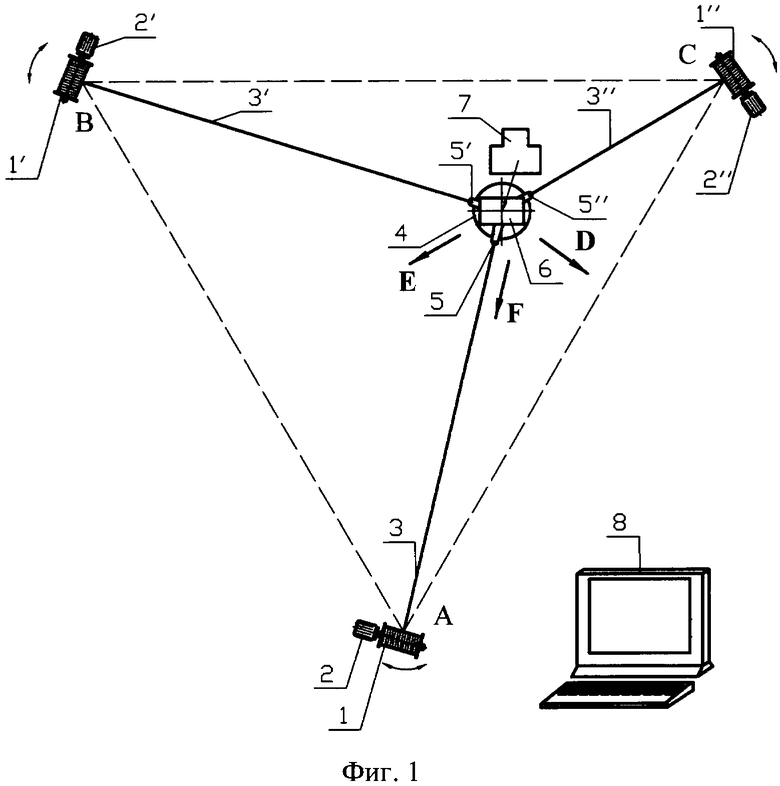
1. Способ управления перемещением подвижной мишени, заключающийся в приложении к опорным салазкам мишени тягового усилия от лебедки посредством троса и последующем перемещении мишени с заданной скоростью, отличающийся тем, что тяговое усилие к салазкам прилагают попеременно в разных направлениях.
2. Способ по п. 1, отличающийся тем, что тяговое усилие к опорным салазкам мишени прилагают посредством совместной регулируемой работы нескольких лебедок, размещаемых в вершинах выпуклой геометрической фигуры, например трех, размещенных в вершинах треугольника.
3. Устройство для перемещения подвижной мишени, включающее реверсивную тросовую лебедку с приводом и выводами троса в сторону мишенного поля, салазки с установленной на них мишенью, содержащие узел зацепления троса, а также аппаратуру управления и связи, отличающееся тем, что устройство содержит минимум три тросовых лебедки, устанавливаемых с возможностью поворота относительно вертикальной оси, салазки выполнены в виде тарелки с внешней отбортовкой выпуклого криволинейного профиля, в центре которой размещена вертикальная стойка-ось, на которой, в свою очередь, размещены с возможностью поворота вокруг нее минимум три узла зацепления троса, а также платформа для крепления мишени, при этом приводы лебедок выполнены с возможностью бесступенчатого регулирования по частоте и направлению вращения посредством компьютера, дополнительно содержащегося в комплекте аппаратуры управления.
| Шина для лечения переломов нижней трети голени | 1939 |
|
SU60199A1 |
| Предварительно напряженный железобетонный элемент | 1949 |
|
SU85224A1 |
| УЧЕБНЫЙ СТЕНД ДЛЯ ОБУЧЕНИЯ СТРЕЛЬБЕ | 2007 |
|
RU2337302C1 |
| Приспособление для установки иглы в граммофонных звукоснимателях | 1932 |
|
SU31643A1 |
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ СТРЕЛКА НА СТЕНДЕ | 1993 |
|
RU2074372C1 |
| US 7614626 B1, 10.11.2009. | |||

