Изобретение относится к области подъемно-транспортного машиностроения и может быть использовано для погрузки, перевозки и механизированной разгрузки металлического лома, а также для осуществления операции обнаружения в металлоломе немагнитных материалов и объектов наполненных, легко воспламеняющимися или взрывоопасными веществами в твердом, жидком или газообразном состоянии.
Качество вторичного металлического лома, поступающего на переработку в металлургические производства должно соответствовать ГОСТ 2787-75. Согласно вышеуказанного ГОСТ(а) максимально допустимая засоренность металлического лома по всем категориям не должна превышать 5% от общей массы металлолома. На практике многие поставщики металлолома, отгружающие его железнодорожным транспортом, пренебрегают этим требованием, пользуясь сложностями, возникающими у металлоприемной организации при разгрузке железнодорожных вагонов вследствие жестких норм ограничения простоя подвижного состава. Другой проблемой организаций, занимающихся переработкой металлолома приводящим к простою металлоперерабатывающих печей, относится наличие в металлоломе объектов, наполненных веществами, находящимися в твердом, жидком или газообразном состоянии. Эти объекты могут быть наполнены легковоспламеняющимися или взрывоопасными веществами, приводящими к взрывам и частичному разрушению печей и как следствие, к их простою. Поэтому выявление и отбраковка немагнитных материалов и вышеуказанных объектов является одной из важнейших задач металлоперерабатывающих организаций.
Известно «Устройство для обнаружения и точного наведения грузозахватного механизма на затонувшую древесину, (см. патент №2245836 от 10. 02. 2005 г.).
Устройство по вышеуказанному патенту включает грейфер, датчик эхолота, блок обработки сигнала и дисплей. При этом датчик эхолота установлен непосредственно на криволинейной челюсти грузозахватного механизма с возможностью распространения области его сигнала в форме конуса с вершиной в датчике как в сторону от грузозахватного механизма, так и в одном направлении с его рабочей областью.
Данное устройство позволяет оператору находить удаленные топляки и осуществлять точное наведение грейфера на топляк по изображению, сформированному на дисплее эхолота в результате обработки отраженного сигнала, но оно не может быть в должной мере использовано для выявления объектов, наполненных веществами, находящимися в твердом, жидком или газообразном состоянии.
Наиболее близким техническим решением к предлагаемому техническому решению задачи является «Кран манипулятор металловозный самосвального типа (см. патент №2245804 от 10. 02. 2005 г.).
Данный кран-манипулятор содержит автомобильный тягач, металловозную платформу с кузовом, снабженным двухстворчатой дверью, и манипулятор, оснащенный грузозахватным механизмом грейферного типа. Автономный подъемник расположен между передней стенкой кузова платформы и гидроманипулятором и соединен телескопическим звеном с присоединителем кузова через спинку П-образного качающегося коромысла.
Рассмотренный кран-манипулятор позволяет улучшить технико-эксплуатационные характеристики других аналогов, но он не может быть использован для выявления немагнитных материалов и объектов наполненных, легко воспламеняющимися или взрывоопасными веществами, находящимися в твердом, жидком или газообразном состоянии из металлолома.
Техническим результатом предложенного технического решения задачи является кран-манипулятор, обеспечивающий в процессе разгрузки металлолома из железнодорожных вагонов, выявление из него немагнитных материалов и объектов (боеприпасов, сосудов, малых емкостей, патрубков, огнетушителей, малых газобаллонов, пневматической подвески автомобилей и прочее) наполненных веществами находящимися в твердом, жидком или газообразном состоянии, представляющими угрозу выхода из строя металлоперерабатывающих печей.
Также техническим результатом предложенного технического решения задачи является снижение трудоемкости процесса выявления немагнитных материалов и вышеуказанных объектов за счет его автоматизации.
Технический результат достигается тем, что в кране-манипуляторе, предназначенном для выявления из металлолома немагнитных материалов и объектов, наполненных веществами в твердом, жидком или газообразном состоянии, включающем автомобильный тягач, манипулятор с грузозахватным механизмом, состоящим из корпуса с шарнирно прикрепленными к нему приводными челюстями, и закрепленную на раме шасси тягача платформу с размещенной на ней корытообразным кузовом с задней открывающейся двухстворчатой дверью. На автомобильном тягаче закреплена видеокамера и тепловизор информативно связанные с блоком обработки данных и монитором, а корытообразный кузов разделен на две секции в одной из которых размещен парогенератор, например дизельный, выходная магистраль которого связана гибким шлангом с полым диском с перфорированным основанием закрепленным на корпусе грузозахватного механизма, причем одна пара взаимно симметричных приводных челюстей грузозахватного механизма снабжена встроенными видеокамерой и тепловизором, информативно связанными с блоком обработки данных и монитором.
Преимущественно чтобы, манипулятор был снабжен системой управления выведенной в кабину автомобильного тягача.
Преимущественно чтобы, видеокамера и тепловизор были снабжены системой автоматического слежения, а грузозахватный механизм был снабжен инфракрасным датчиком.
Преимущественно чтобы, гибкий шланг был связан с полым диском через патрубок, размещенный в корпусе грузозахватного механизма.
Преимущественно чтобы, основание полого диска было снабжено кольцевым утолщением, в котором выполнены форсунки.
Преимущественно чтобы, блок обработки данных был снабжен нейронной сетью.
На фиг. 1 - представлен общий вид на кран-манипулятор.
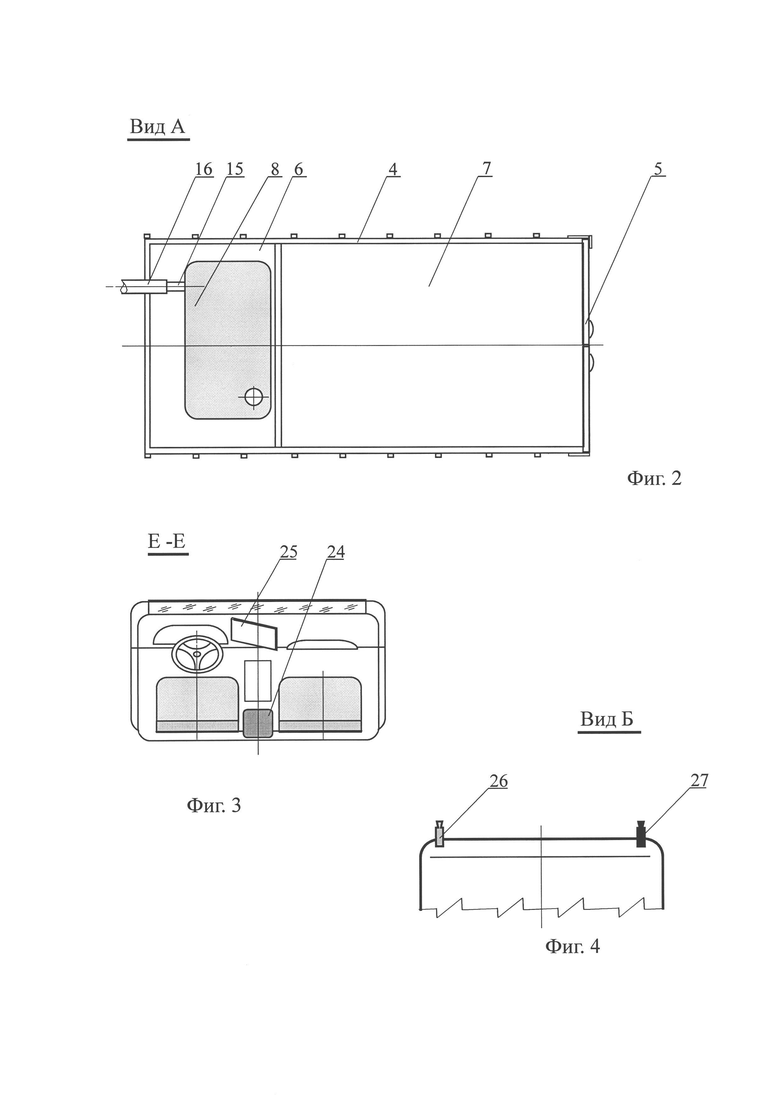
На фиг. 2 - показан вид А на фиг. 1 (вид сверху на корытообразный кузов).
На фиг. 3 - показан разрез Е-Е на фиг. 1.
На фиг. 4 - показан вид Б на фиг. 1.
На фиг. 5 - представлен грузозахватный механизм со сложенными приводными челюстями, размещенный в железнодорожном вагоне, в момент сканирования металлолома.
На фиг. 6 - показан вид С на фиг. 5.
На фиг. 7 - показан вид Д на фиг. 5 в варианте, когда основание полого диска снабжено кольцевым утолщением, в котором выполнены форсунки.
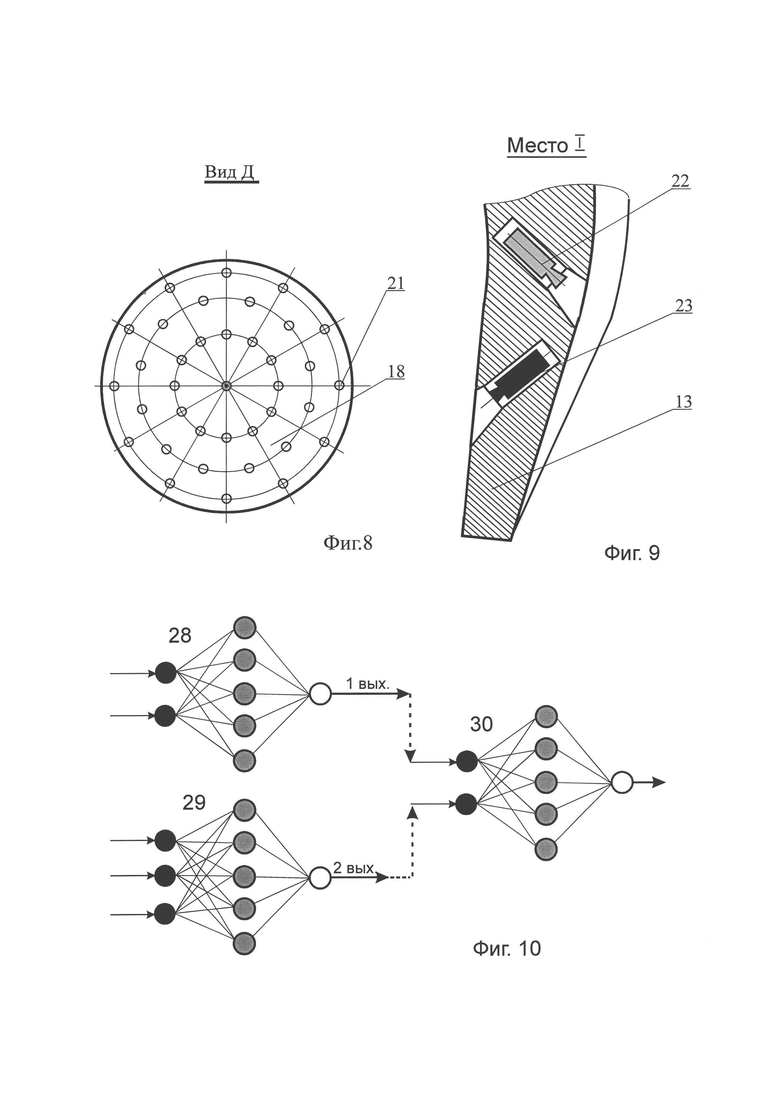
На фиг. 8 - показан вид Д на фиг. 5 в варианте, когда основание полого диска перфорировано - снабжено рядом отверстий.
На фиг. 9 - представлено место 1 на фиг. 1.
На фиг. 10 - представлена нейронная сеть.
Кран-манипулятор состоит из автомобильного тягача 1, на раме шасси 2 которого закреплена платформа 3 с размещенной на ней корытообразным кузовом 4 с задней открывающейся двухстворчатой дверью 5 (фиг. 1). Корытообразный кузов 4 разделен на две секции 6 и 7, в одной из которых размещен парогенератор 8, например, дизельный (фиг. 2). Вторая секция 7 используется для размещения в ней обнаруженных в процессе выгрузки металлолома из железнодорожных вагонов объектов 9 наполненных, легко воспламеняющимися или взрывоопасными веществами, находящимися в твердом, жидком или газообразном состоянии.
Манипулятор 10 размещен между кабиной автомобильного тягача 1 и корытообразным кузовом 4 и снабжен системой управления выведенной в кабину автомобильного тягача 1 (не показано). Возможен вариант реализации крана-манипулятора органы управления и место оператора в котором закреплены непосредственно на самом манипуляторе (не показано). В этом случае монитор размещается в рабочей зоне оператора (не показано).
На конце манипулятора 10 закреплен грузозахватный механизм 11 состоящий из корпуса 12 с шарнирно прикрепленными к нему приводными челюстями 13 (фиг. 5). Снизу корпуса 12 закреплен полый диск 14. Выходная магистраль 15 парогенератора 8 связана гибким шлангом 16 с полым диском 14 через патрубок 17 проходящий внутри корпуса 12 грузозахватного механизма 11. Основание 18 полого диска 14 снабжено кольцевым утолщением 19 в котором выполнены форсунки 20 (фиг. 7). Возможен вариант реализации основания 18 полого диска 14 перфорированным - снабженным рядом отверстий 21 (фиг. 8).
В нижней части одной пары взаимно симметричных приводных челюстей 13 размещены встроенные видеокамера 22 и тепловизор 23 (фиг. 9), которые информативно связанны с блоком обработки данных 24 и монитором 25 (фиг. 3).
На автомобильном тягаче 1 закреплена видеокамера 26 и тепловизор 27 (фиг. 4) снабженные системами автоматического слежения по аналогии с AutoTrak 2.0 (не показано) при этом на грузозахватном механизме 11 в любом месте закрепляется инфракрасный датчик (не показано). Видеокамера 26 и тепловизор 27 информативно связанны с блоком обработки данных 24 и монитором 25.
Информативная связь может быть, как проводной, так и с использованием беспроводной локальной сети, например, Wi-Fi.
Кран-манипулятор работает следующим образом.
При осуществлении разгрузки металлолома оператор поднимает грузозахватный механизм 11 над железнодорожным вагоном, позволяя встроенным видеокамерам 22 приводных челюстей 13 грузозахватного механизма 11 произвести идентификацию в железнодорожном вагоне металлолома на предмет наличия объекта 9. При этом β - угол обзора поверхности железнодорожного вагона каждой встроенной видеокамерой 22 (фиг. 5).
Идентификация осуществляется по типоразмерам объекта 9. К данным типоразмерам относятся; боеприпасы, сосуды, малые емкости, заглушенные патрубки, огнетушители, малые газобаллоны, пневматическая подвеска автомобилей и прочее.
Распознание объектов 9 по типоразмерам осуществляется по нейронной сети 28 и осуществляется по двум входными параметрам - габариты и форма металлолома (фиг. 10). В случае обнаружения объекта 9 одной из встроенных видеокамер 22 она подает сигнал в блок обработки данных 24. С блока обработки данных 24 подается изображение места расположения объекта 9 на монитор 25. Возможно также транслирование полученных данных по сети Wi-Fi на дисплей офисного компьютера (не показано). Оператор, обнаружив на своем мониторе 25 место расположения объекта 9, размещает над ним грузозахватный механизм 11 и раскрывает приводные челюсти 3 (фиг. 1 и фиг. 9). После опускания грузозахватного механизма 11 на металлолом, срабатывает датчик загрузки (не показан) и блок обработки данных 24, получив данную информацию, подает команду на подачу горячего пара. Оператор в свою очередь дает команду на сжатие приводных челюстей 13, и производит извлечение грузозахватного механизма 11 вместе с металлоломом из железнодорожного вагона.
Горячий пар из выходной магистрали 15 парогенератора 8 по гибкому шлангу 16, и патрубку 17 поступает в полый диск 14 и, выходя из форсунок 20, разогревает металлолом, находящийся в грузозахватном механизме 11. За время операции сжатия приводных челюстей 13, операции подъема грузозахватного механизма 11 из железнодорожного вагона и операции его перемещения в зону выгрузки, горячий пар, выходящий из форсунок 20 успевает нагреть металлолом на 1…2 градуса, в то время как объекты 9, заполненные веществами в твердом, жидком или газообразном состоянии нагреваются на 0,3…0,5 градуса, что обусловлено их более высокой теплоемкостью и низкой теплопроводностью.
Кроме этого, объекты 9, являющиеся как правило, герметичными сосудами взаимодействуют с горячим паром только по внешней поверхности, в то время как любой металлопрокат, например, отрезок уголка или швеллера контактируют с горячим паром по всей поверхности (внешней и внутренней). Поэтому разогрев объектов 9 происходит медленнее.
Эти два фактора - разность теплоемкостей и меньшая площадь взаимодействия с горячим паром влияют на разность температур объектов 9 и металлолома.
При извлечении грузозахватного механизма 11 из железнодорожного вагона видеокамера 26 и тепловизор 27 (фиг. 4) снабженные системами автоматического слежения (не показано) выявляют инфракрасный датчик (не показано) закрепленный на грузозахватном механизме 11 и осуществляют разворот (слежение) за ним вплоть до выгрузки металлолома.
После размещения грузозахватного механизма 11 над местом выгрузки оператор манипулятора 10 выключает подачу горячего пара и осуществляет выдержку грузозахватного механизма 11 в течении 2-5 секунд. Выдержка позволяет осуществить равномерное распределение повышенной температуры по поверхности элементов металлолома.
В момент открытия приводных челюстей 13 грузозахватного механизма 11 (фиг. 1), блоком обработки данных 24 подается команда на замер температуры падающего металлолома встроенным телевизорам 23 размещенным в приводных челюстях 13 (фиг. 9), и тепловизору 27 закрепленному на автомобильном тягаче 1. Предпочтительно осуществлять сброс металлолома с высоты доставочной для идентификации объектов 9 при падении металлолома (1,5…2 метра). Тепловизор 27 является дублером, встроенным тепловизорам 23, но при этом имеет лучшие параметры разрешения и точности.
При обнаружении одним из встроенных тепловизоров 23 или тепловизора 27 объекта 9 или немагнитных материалов, за счет несоответствия их температуры температуре металлолома указанный тепловизор передает информацию в блок обработки данных 24, который, используя базу данных по изменению температурного режима металлолома под воздействием горячего пара, распознает объекты 9 и немагнитные материалы, используя нейронную сеть 29, имеющую три входных параметра - масса, габариты и изменение температуры металлолома (фиг. 10).
Выявление объектов 9 и немагнитных материалов в предложенном техническом решении задачи, осуществляется с помощью двух нейронных сетей 28 и 29 идентифицирующих объект 9 и немагнитные материалы по типоразмеру и по разности температур металлолома относительно объектов 9 и немагнитных материалов.
Полученные от них решения являются входными данными (нейронами) для нейронной сети 30, которая выдает искомое решение выявлению объекта 9 (фиг. 10). Выявленный после выгрузки металлолома из грузозахватного механизма 11 объект 9, регистрируется на мониторе 25 оператора. Далее оператор производит захват приводными челюстями 13 объекта 9 и выгрузку его в секцию 7 корытообразного кузова 4.
В случае выявления в металлоломе немагнитных материалов, превышающих процентное содержание более 5%, блок обработки данных 24 выдает информацию на мониторе 25 оператора место его выгрузки, оставляя его для дальнейшей обработки технической службе.
Предложенный кран-манипулятор позволяет:
- осуществлять в процессе разгрузки металлолома из железнодорожных вагонов, выявление немагнитных материалов и объектов (боеприпасов, сосудов, малых емкостей, патрубков, огнетушителей, малых газобаллонов, пневматической подвески автомобилей и прочее) наполненных веществами, находящимися в твердом, жидком или газообразном состоянии.
- обеспечить автоматизацию процесса выявления вышеприведенных объектов и немагнитных материалов из металлолома.
- использовать самообучение блока обработки данных в операции выявления немагнитных материалов и объектов за счет реализации нейронной сети.
Кроме этого, предложенное техническое решение задачи может быть также использовано в случаях террористических актов и после проведения военных учении, для обнаружения не разорвавшихся снарядов, малых авиабомб и противотанковых ракетных снарядов (ПТУРС) как на местности, так и в условиях разрушенных зданий и завалов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ДЛЯ ОБНАРУЖЕНИЯ И ОТБРАКОВКИ ИЗ МЕТАЛЛОЛОМА ТВЕРДО/ЖИДКО/ГАЗОНАПОЛНЕННЫХ ОБЪЕКТОВ | 2019 |
|
RU2744531C1 |
| Система выявления немагнитных материалов, регистрации и контроля выгрузки металлолома из железнодорожных вагонов | 2020 |
|
RU2726576C1 |
| СПОСОБ И ЛИНИЯ ПО ОТБРАКОВКЕ ИЗ МЕТАЛЛОЛОМА ТВЕРДО/ЖИДКО/ГАЗОНАПОЛНЕННЫХ ОБЪЕКТОВ (ВАРИАНТЫ) | 2019 |
|
RU2722552C1 |
| ЛИНИЯ ПО ОТБРАКОВКЕ ИЗ МЕТАЛЛОЛОМА ТВЕРДО/ЖИДКО/ГАЗОНАПОЛНЕННЫХ ОБЪЕКТОВ | 2019 |
|
RU2722553C1 |
| УСТАНОВКА ДЛЯ ДОСМОТРА ОБЪЕКТОВ, ПРЕИМУЩЕСТВЕННО ЖЕЛЕЗНОДОРОЖНЫХ ВАГОНОВ | 2019 |
|
RU2715812C1 |
| УСТАНОВКА ДЛЯ ДОСМОТРА ОБЪЕКТОВ, ПРЕИМУЩЕСТВЕННО ЖЕЛЕЗНОДОРОЖНЫХ ВАГОНОВ | 2019 |
|
RU2715813C1 |
| Система мониторинга состояния ленточного конвейера преимущественно для подземных наклонно/горизонтальных горных выработок | 2020 |
|
RU2743600C1 |
| КРАН-МАНИПУЛЯТОР МЕТАЛЛОВОЗНЫЙ | 1998 |
|
RU2140367C1 |
| КРАН-МАНИПУЛЯТОР МЕТАЛЛОВОЗНЫЙ САМОСВАЛЬНОГО ТИПА | 2003 |
|
RU2245804C2 |
| Весоповерочный комплекс | 2019 |
|
RU2703194C1 |


Изобретение относится к области подъемно-транспортного машиностроения и может быть использовано для погрузки, перевозки и механизированной разгрузки металлического лома, а также для осуществления операции обнаружения в металлоломе немагнитных материалов и объектов, наполненных легковоспламеняющимися или взрывоопасными веществами в твердом, жидком или газообразном состоянии. Кран-манипулятор включает автомобильный тягач, манипулятор с грузозахватным механизмом, состоящим из корпуса с шарнирно прикрепленными к нему приводными челюстями, и закрепленную на раме шасси тягача платформу с размещенным на ней корытообразным кузовом с задней открывающейся двухстворчатой дверью. На автомобильном тягаче закреплены видеокамера и тепловизор, информативно связанные с блоком обработки данных и монитором, а корытообразный кузов разделен на две секции, в одной из которых размещен парогенератор. Выходная магистраль парогенератора связана гибким шлангом с полым диском с перфорированным основанием, закрепленным на корпусе грузозахватного механизма, причем одна пара взаимно симметричных приводных челюстей грузозахватного механизма снабжена встроенными видеокамерой и тепловизором, информативно связанными с блоком обработки данных и монитором. Достигается снижение трудоемкости процесса материалов за счет автоматизации процесса. 5 з.п. ф-лы, 10 ил.
1. Кран-манипулятор, предназначенный для выявления из металлолома немагнитных материалов и объектов, наполненных веществами в твердом, жидком или газообразном состоянии, включающий автомобильный тягач, манипулятор с грузозахватным механизмом, состоящим из корпуса с шарнирно прикрепленными к нему приводными челюстями, и закрепленную на раме шасси тягача платформу с размещенной на ней корытообразным кузовом с задней открывающейся двухстворчатой дверью, отличающийся тем, что на автомобильном тягаче закреплены видеокамера и тепловизор, информативно связанные с блоком обработки данных и монитором, а корытообразный кузов разделен на две секции, в одной из которых размещен парогенератор, например дизельный, выходная магистраль которого связана гибким шлангом с полым диском с перфорированным основанием, закрепленным на корпусе грузозахватного механизма, причем одна пара взаимно симметричных приводных челюстей грузозахватного механизма снабжена встроенными видеокамерой и тепловизором, информативно связанными с блоком обработки данных и монитором.
2. Кран-манипулятор по п. 1, отличающийся тем, что манипулятор снабжен системой управления, выведенной в кабину автомобильного тягача.
3. Кран-манипулятор по п. 1, отличающийся тем, что видеокамера и тепловизор снабжены системой автоматического слежения, а грузозахватный механизм снабжен инфракрасным датчиком.
4. Кран-манипулятор по п. 1, отличающийся тем, что гибкий шланг связан с полым диском через патрубок, размещенный в корпусе грузозахватного механизма.
5. Кран-манипулятор по п. 1, отличающийся тем, что основание полого диска снабжено кольцевым утолщением, в котором выполнены форсунки.
6. Кран-манипулятор по п. 1, отличающийся тем, что блок обработки данных снабжен нейронной сетью.
| CN 109969178 A, 05.07.2019 | |||
| Белковый корм для сельскохозяйственных животных | 1951 |
|
SU94524A1 |
| Устройство для перемещения носителя утка в зеве ткацкого станка | 1948 |
|
SU84329A1 |
| CN 105922921 A, 07.09.2016. | |||

