Изобретение относится к военной технике и может быть использовано при создании помехозащищенных неконтактных датчиков цели различных боеприпасов, в том числе ракет с головками самонаведения на цель.
Известны способы идентификации цели ракетами с головками самонаведения на цель, в которых момент подрыва ракет определяют с помощью неконтактного датчика цели, устанавливаемого в ракету. Неконтактный датчик цели, как правило, начинает работать на конечном участке подлета ракеты к цели. В качестве неконтактного датчика цели могут быть использованы различные устройства, чувствительные к наличию преграды в направлении цели. Основной проблемой при применении неконтактных датчиков цели является их недостаточная защищенность от воздействия помех.
Одним из основных способов определения положения ракеты по отношению к цели является способ, основанный на использовании радиолокационной схемы. В устройствах, реализующих такие схемы, как правило, используются классические приемы радиолокации с применением радиоантенных устройств излучения и приема радиоволн, а также лазерных приемопередатчиков. Примером такого технического решения является «способ управления неконтактным взрывателем боевой части ракеты, управляемой по лучу лазера от носителя (самолета), включающий формирование каналов управления при одновременном нахождении цели и ракеты в управляющем поле лазерного луча, через которые производят постоянное считывание разницы расстояний от блока управления до цели и до ракеты» (Патент RU №2378611). Недостатком такой системы управления является то, что при таком управлении ракета и цель все время находится в поле облучения от носителя.
Но есть и ракеты с активной радиолокационной головкой самонаведения. Самый яркий представитель такого типа вооружений - американская AIM-120 AMRAAM. Наведение AIM-120 включает в себя три участка: командно-инерциальный, автономный инерциальный и активный радиолокационный. Перед пуском РЛС самолета задает координаты цели и при необходимости корректирует полет AMRAAM. На конечном участке полета ракета наводится на цель самостоятельно, без помощи самолета-носителя. Ракета имеет неконтактный радиолокационный взрыватель. При подлете к цели происходит подрыв боевой части. Применяемые в ракете радиолокационные взрыватели имеют антенные устройства, которые позволяют формировать узкие полосы излучения и приема, с целью защиты радиоканалов от воздействия радиопомех. Кроме того, с этой же целью, радиолокация осуществляется с использованием коротких импульсов, принимаемых в определенных временных интервалах, а также применяются различные алгоритмы селекции и обработки принятой информации.
Однако, несмотря на сложные схемы обработки информации, современные средства постановки помех позволяют создать условия для ложных срабатываний таких неконтактных датчиков цели. В связи с этим, процесс создания помехозащищенных технических решений для надежной работы ракет класса «воздух-воздух» продолжается.
Предлагаемое техническое решение позволяет повысить помехозащищенность неконтактных датчиков цели ракет, использующих головки самонаведения ракет на цель, от воздействия искусственных помех. В основу предлагаемого способа положено техническое решение, основанное на дополнении, используемой в неконтактных датчиках цели, схемы радиолокации, системой оценки скорости сближения ракеты с целью. Причем эту скорость предлагается определять, как с помощью головки самонаведения, так и с помощью радиолокатора неконтактного датчика цели. Сопоставление значений этой скорости на определенных участках траектории позволяет повысить возможности технических устройств выполнять идентификацию цели, и, тем самым, позволяет повысить помехозащищенность неконтактного датчика цели, применяемого в ракете.
Предлагаемый способ идентификации цели с помощью радиовзрывателя ракеты с головкой самонаведения заключающийся в том, что с помощью генератора радиовзрывателя через промежутки времени Ti создают в излучающей антенне радиовзрывателя короткие радиоимульсы длительностью τ (τ<<Ti) с частотой заполнения ω0. Эта частота заполнения существенно отличается от рабочей частоты радиолокационной станции головки самонаведения. С помощью приемной антенны радиовзрывателя непрерывно принимают радиоимпульсы в промежутке времени стробирования Тст. Причем система электронных фильтров приемного тракта радиовзрывателя выделяет электромагнитные волны в ограниченном диапазоне частот (в зоне частоты ω0). С помощью канала обработки информации радиовзрывателя проводят анализ принятых импульсов, и по их параметрам судят о наличии цели.
При этом с помощью радиолокационной станции головки самонаведения ракеты в реальном масштабе времени за каждый промежуток времени Ti определяют скорость сближения ракеты с целью VcГ.
С помощью канала обработки информации радиовзрывателя за каждый промежуток времени Ti вычисляют расстояние до цели Si используя соотношение:

где с - скорость света, ti - время от начала излучения генератором до появления импульса в канале обработки информации. За каждые два последовательных периода излучения вычисляют скорость сближения ракеты с целью Vc, используя соотношение 
где Si+1 - расстояние до цели в следующий промежуток времени ti+1, за каждый промежуток времени Ti.
Сравнивают вычисленные значения VсГ и Vc. По соотношению этих скоростей идентифицируют принятые за время строба Тст сигналы, как отраженные от цели. На основании результатов сравнения принимают решение на срабатывание взрывателя по заданному алгоритму.
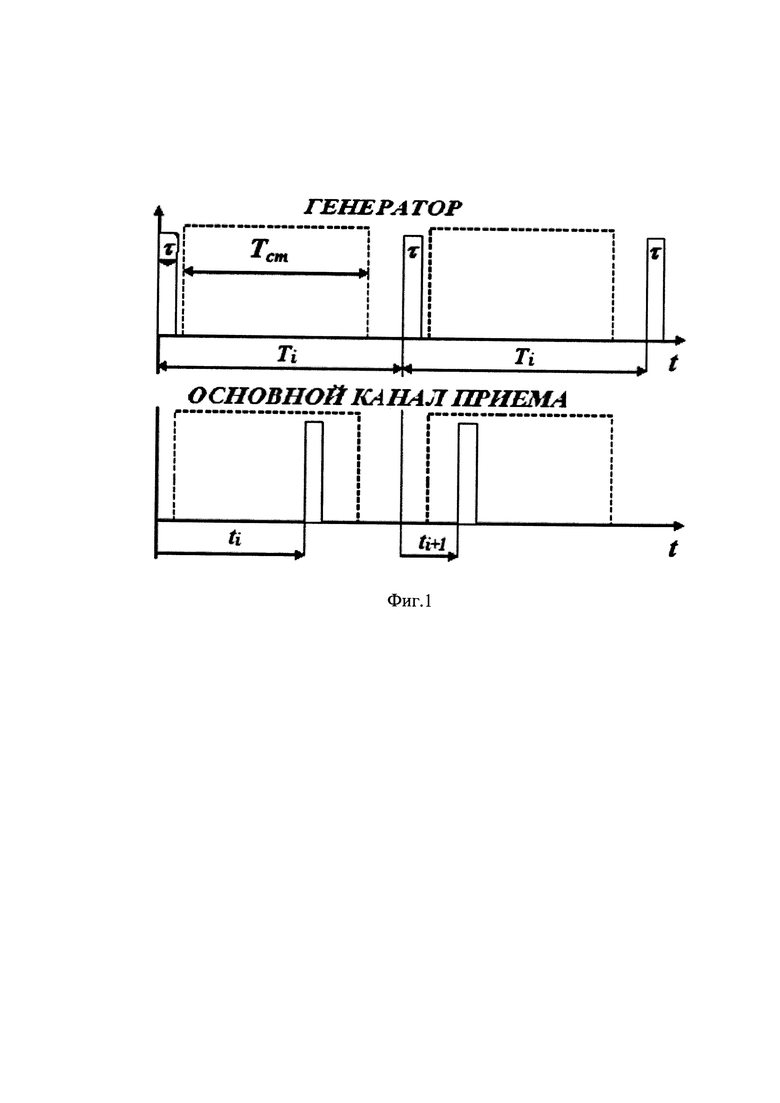
Предлагаемое техническое решение поясняется временной диаграммой, приведенной на фиг. 1.
Фиг. 1. Временная диаграмма работы основных блоков технического решения по оценке скорости сближения ракеты с целью: τ - длительность радиоимпульса, подаваемого на антенну излучателя радиовзрывателя; Ti -промежуток времени через который, генератор излучает очередной импульс; Тст - время строба (промежуток времени с момента излучения до момента приема информации, в течение которого появление импульса в канале приема является индикатором наличия отраженного сигнала от цели); ti - время от начала излучения генератором до появления импульса в канале обработки информации.
Предлагаемый способ реализуется следующим образом. На ракете класса «воздух-воздух» устанавливаются две системы обнаружения цели. Наличие двух независимых систем обнаружения цели позволяет повысить помехозащищенность ракеты от воздействия искусственных помех.
Первая система позволяет обнаружить цель, например, с помощью тепловой или радиолокационной головок самонаведения. Примеры реализации таких устройств широко известны из технической литературы. Например, техническое решение, применяемое в ракете AIM-120D AMRAAM (aeronavtika.com.>news…rakety-klassa-vozduh-vozduh). Эта система позволяет выдавать команды на рулевые устройства ракеты для непрерывного наведения ракеты на цель.
Вторая система обнаружения цели представляет собой радиолокационное устройство, позволяющее с высокой достоверностью определить положение ракеты относительно цели, и после этого обеспечивает выдачу команды на подрыв боевой части ракеты.
Для идентификации цели, подтверждения, что отраженный сигнал от цели (сигнал во временном интервале Тст) действительно является сигналом от цели, а не от помехи, проводят оценку скорости сближения ракеты с целью обеими системами обнаружения цели одновременно. Сравнивают эти значения непосредственно, либо по характеру их изменения, например, определяют отношения значений предыдущего измерения и последующего. При совпадении измеренных и вычисленных величин принимают решение о реальности цели, и по заданному алгоритму, подают команду на подрыв боевой части ракеты.
Технические решения для определения скорости сближения ракеты с целью по данным с головки самонаведения ракеты VсГ известны. Аналогичные устройства используются, например, при измерении скорости артиллерийских снарядов. Так артиллерийская баллистическая станция АБС-2С «Рампа» позволяет определять скорость снаряда с погрешностью 0,05% в диапазоне скоростей -50…2000 м/с.
Техническое решение по определению скорости сближения ракеты с целью, реализуемое в неконтактном датчике цели (радиовзрывателе), заключается в следующем. С помощью вычислительного устройства неконтактного датчика цели за каждый период излучения радиоимпульсов Ti выполняют регистрацию отраженного от цели импульса, и измеряют промежуток времени ti {ti - время от начала излучения генератором до появления импульса в канале обработки информации) в каждом интервале времени, равном длительности строба Тст. На основе этих измерений с помощью соотношений (1)-(2) выполняют определение скорости сближения ракеты с целью Vc. Точность оценки скорости сближения ракеты с целью, измеренная по определению времени прихода сигнала высокая. Так в реальных импульсных радиовзрывателях длительность импульса излучения составляет примерно 100 нс. Точность фиксации времени появления отраженного импульса по отношению к излученному импульсу не превышает 2 нс (менее 2%). Длительность периода следования импульсов составляет примерно 1 мс. При скорости сближения ракеты с целью примерно 1000 м/с за 1 мс цель сблизится с ракетой на расстояние Д, определяемое величиной Д=1000×10-3=1 (м). В этом случае время между излучаемым импульсом и принятым отраженным импульсом составит величину ti =2Д/с=2×1/3×108=0,7×10-8(c), т.е. 7 нс. При точности измерения времени 2 нс, величина 7 нс может быть надежно зафиксирована, т.е. в реализуемых технических решениях расчет скорости сближения можно выполнять за каждый период излучения. При меньших скоростях сближения ракеты с целью скорость их сближения целесообразно определять за несколько периодов излучения и приема.
Вычислительное устройство неконтактного датчика цели за каждый промежуток времени Ti (либо за несколько промежутков времени) фиксирует вычисленные значения скорости с обеих систем измерения (VсГ и Vc) и выполняет их сравнение.
Сравнение выполняется на определенном участке движения, когда головка самонаведения ракеты уверенно определяет, что ракета приближается к цели. Это условие оценивается по заданному алгоритму, например, путем сравнения каждого последующего измерения с предыдущим. В случае, если определить положение цели с помощью головки самонаведения мешает помеха, то вычислительное устройство головки выдает команду на прекращение режима наведения (ракета движется в направлении цели без наведения), и сообщает в вычислительное устройство неконтактного датчика цели последнее значение скорости сближения. Это значение скорости является ориентиром для принятия решения о времени подрыва боевой части ракеты.
На основании обработки информации в приемном канале радиовзрывателя, например, путем подсчета количества отраженных импульсов в последовательности строб-импульсов, идентификации этих импульсов как отраженных сигналов от цели (по скорости сближения), сравнении, полученных величин, с заданными значениями, выдается команда на подрыв боевой части ракеты.
Реализуемость приведенного выше технического решения подтверждена макетированием схемных электронных аналогов в АО «НПП «Дельта».
Изложенные сведения о заявленном изобретении, охарактеризованном в независимом пункте формулы, свидетельствуют о возможности его осуществления с помощью описанных в заявке и известных средств и методов. Следовательно, заявленный способ соответствует условию промышленной применимости.
Изобретение относится к военной технике и может быть использовано при создании помехозащищенных неконтактных датчиков цели различных боеприпасов, в том числе ракет с головками самонаведения на цель. Способ идентификации цели с помощью радиовзрывателя ракеты с головкой самонаведения заключается в том, что с помощью генератора радиовзрывателя через промежутки времени Ti создают в излучающей антенне радиовзрывателя короткие радиоимульсы длительностью τ (τ<<Тi). С помощью приемной антенны радиовзрывателя непрерывно принимают радиоимпульсы в промежутке времени стробирования Тст. При этом с помощью радиолокационной станции головки самонаведения ракеты в реальном масштабе времени за каждый промежуток времени Ti определяют скорость сближения ракеты с целью VсГ. С помощью канала обработки информации радиовзрывателя за каждый промежуток времени Ti вычисляют расстояние до цели Si, используя соотношение Si=cti/2, где с - скорость света, ti - время от начала излучения генератором до появления импульса в канале обработки информации. За каждые два последовательных периода излучения вычисляют скорость сближения ракеты с целью Vc, используя соотношение Vc=(Si-Si+1)/Ti, где Si+1 - расстояние до цели в следующий промежуток времени ti+1, за каждый промежуток времени Ti. Сравнивают вычисленные значения VсГ и Vc. По соотношению этих скоростей идентифицируют принятые за время строба Тст сигналы, как отраженные от цели. На основании результатов сравнения принимают решение на срабатывание взрывателя по заданному алгоритму. Изобретение позволяет повысить помехозащищенность неконтактных датчиков цели ракет, использующих головки самонаведения ракет на цель, от воздействия искусственных помех. 1 ил.
Способ идентификации цели с помощью радиовзрывателя ракеты с головкой самонаведения, заключающийся в том, что с помощью генератора радиовзрывателя через промежутки времени Ti создают в излучающей антенне радиовзрывателя короткие радиоимульсы длительностью τ (τ<<Ti) с частотой заполнения ω0, с помощью приемной антенны радиовзрывателя непрерывно принимают радиоимпульсы, в промежутке времени стробирования Тст с помощью канала обработки информации проводят анализ принятых импульсов, и, по их параметрам судят о наличии цели, отличающийся тем, что с помощью головки самонаведения ракеты в реальном масштабе времени за каждый промежуток времени Ti определяют скорость сближения ракеты с целью VсГ, с помощью канала обработки информации радиовзрывателя за каждый промежуток времени Ti вычисляют расстояние до цели Si используя соотношение
Si=cti/2,
где с - скорость света,
ti - время от начала излучения генератором до появления импульса в канале обработки информации,
в каждые два последовательных периода вычисляют скорость сближения ракеты с целью Vc, используя соотношение
Vc=(Si-Si+l)/Ti,
где Si+1 - расстояние до цели в следующий промежуток времени ti+1 за каждый промежуток времени Ti,
сравнивают вычисленные значения VсГ и Vc, по соотношению этих скоростей идентифицируют принятые за время строба Тст сигналы, как отраженные от цели, и принимают решение на срабатывание взрывателя по заданному алгоритму.
| СПОСОБ ФУНКЦИОНИРОВАНИЯ ИНФОРМАЦИОННО-ВЫЧИСЛИТЕЛЬНОЙ СИСТЕМЫ РАКЕТЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2253825C1 |
| СПОСОБ ФУНКЦИОНИРОВАНИЯ ИНФОРМАЦИОННО-ВЫЧИСЛИТЕЛЬНОЙ СИСТЕМЫ РАКЕТЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2325306C1 |
| СПОСОБ ФУНКЦИОНИРОВАНИЯ ИНФОРМАЦИОННО-ВЫЧИСЛИТЕЛЬНОЙ СИСТЕМЫ РАКЕТЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2351889C2 |
| СПОСОБ УПРАВЛЕНИЯ НЕКОНТАКТНЫМ ВЗРЫВАТЕЛЕМ БОЕВЫХ ЧАСТЕЙ РАКЕТ, УПРАВЛЯЕМЫХ ПО ЛУЧУ ЛАЗЕРА | 2008 |
|
RU2378611C1 |
| Устройство окулярной части перископа с переключателем квазибинокулярного режима в режим монокуляра и обратно | 2024 |
|
RU2830078C1 |
| JP 2008224356 A, 25.09.2008. | |||

