Область техники
[0001] Настоящее раскрытие относится к способу и устройству для генерирования целевой скорости транспортного средства для транспортного средства с содействием вождению, в котором целевая скорость транспортного средства генерируется на основе множества значений команды скорости транспортного средства.
Уровень техники
[0002] В предшествующем уровне техники известны устройства управления содействием водителю транспортного средства, в которых скорость, которая обеспечивает то, что тормозной путь меньше, чем расстояние, на котором возможно прямое распознавание, рассчитывается как предел скорости транспортного средства, и ограничение устанавливается таким образом, что, как минимум, целевая скорость транспортного средства не превышает предел скорости транспортного средства (например, см. патентный документ 1).
Документы предшествующего уровня техники
Патентные документы
[0003] Патентный документ 1: Выложенная заявка на патент Японии №. 2016-141387
Раскрытие изобретения
Проблемы, решаемые изобретением
[0004] Однако в устройствах предшествующего уровня техники нижняя из предела скорости транспортного средства и целевой скорости транспортного средства на основе расстояния интервала, установленного водителем, выбирается и устанавливается в качестве целевой скорости транспортного средства. Таким образом, возникает проблема, заключающаяся в том, что, когда скорость транспортного средства на стороне ускорения относительно скорости транспортного средства в текущий момент времени устанавливается в качестве целевой скорости транспортного средства, несмотря на знание того, что предстоит замедление, будет возникать ненужное ускорение, и будет иметь место большая величина рывка (изменение степени ускорения) во время перехода от ускорения к замедлению.
[0005] Настоящее раскрытие направлено на вышеуказанную проблему, поскольку задачей настоящего изобретения является подавление ненужного ускорения и, кроме того, уменьшение рывка во время перехода от ускорения к замедлению при движении с помощью содействия водителю.
Средства, используемые для решения вышеперечисленных проблем
[0006] Для решения вышеупомянутой задачи в настоящем раскрытии предлагается способ генерирования целевой скорости транспортного средства для транспортного средства с содействием вождению, в котором целевая скорость транспортного средства генерируется для случая, когда транспортное средство должно двигаться/останавливаться, на основе множества значений команд скорости автомобиля, включая по меньшей мере значение команды скорости транспортного средства для следования за ведущим транспортным средством, представляющее собой значение команды скорости транспортного средства, которое соответствует позиции за пределами текущей позиции, заданное для выполнения управления интервалом, чтобы поддерживать расстояние интервала, которое соответствует скорости транспортного средства, для которой скорость транспортного средства, заданная водителем, служит в качестве максимальной скорости транспортного средства, и значение команды скорости транспортного средства на основе картографической информации, представляющее собой значение команды скорости транспортного средства, которое соответствует позиции за пределами текущей позиции, заданное на основании картографической информации.
Прогнозируемое значение команды скорости транспортного средства, которое поступает после истечения заданного промежутка времени от настоящего времени, вычисляется для каждого значения команды скорости транспортного средства из множества значений команды скорости транспортного средства, включая значение команды скорости транспортного средства для следования за ведущим транспортным средством и значение команды скорости транспортного средства на основе картографической информации. Наименьшее значение из множества вычисленных прогнозируемых значений команды скорости транспортного средства выбирается в качестве целевой скорости транспортного средства.
Эффект изобретения
[0007] Как описано выше, путем прогнозирования будущих значений (прогнозируемых значений команды скорости транспортного средства) и выбора наименьшего значения из множества будущих значений для генерирования целевой скорости транспортного средства, может быть подавлено ненужное ускорение и, кроме того, рывок во время перехода от ускорения к замедлению может быть уменьшен при движении с помощью содействия водителю.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0008] Фиг. 1 представляет собой общую схему системы, иллюстрирующую систему автономного управления движением, к которой были применены способ и устройство для генерирования целевой скорости транспортного средства согласно варианту осуществления 1.
Фиг. 2 - это блок-схема, иллюстрирующая первый блок генерирования команды скорости транспортного средства (ACC) способа и устройства для генерирования целевой скорости транспортного средства варианта осуществления 1.
Фиг. 3 - это блок-схема, иллюстрирующая второй блок генерирования команды скорости транспортного средства (линия остановки) способа и устройства для генерирования целевой скорости транспортного средства варианта осуществления 1.
Фиг. 4 - диаграмма характеристик профиля скорости транспортного средства, иллюстрирующая примерный профиль скорости транспортного средства, сгенерированный вторым блоком генерирования команды скорости транспортного средства (линия остановки).
Фиг. 5 - это блок-схема, иллюстрирующая третий блок генерирования команды скорости транспортного средства (предел скорости транспортного средства) способа и устройства для генерирования целевой скорости транспортного средства первого варианта осуществления.
Фиг. 6 - это блок-схема, иллюстрирующая четвертый блок генерирования команды скорости транспортного средства (замедление при повороте) способа и устройства для генерирования целевой скорости транспортного средства варианта осуществления 1.
Фиг. 7 - это блок-схема, иллюстрирующая подробную конфигурацию блоков вычисления прогнозируемой команды скорости транспортного средства способа и устройства для генерирования целевой скорости транспортного средства согласно варианту осуществления 1.
Фиг. 8 - блок-схема последовательности операций, иллюстрирующая последовательность операций для генерирования целевой скорости транспортного средства, выполняемого блоком автономного управления вождением в варианте осуществления 1.
Фиг. 9 - временная диаграмма, иллюстрирующая характеристики целевой скорости транспортного средства (наименьшего значения) в сценарии движения, в котором сразу же после начала замедления до предела скорости из-за появления тумана ведущее транспортное средство теряется в сравнительном варианте осуществления.
Фиг. 10 - временная диаграмма, иллюстрирующая характеристики целевой скорости транспортного средства (наименьшие значения прогнозируемых скоростей транспортного средства) в первом варианте осуществления в сценарии замедления до остановки, в котором после начала замедления, ведущего к предстоящей линии остановки, ведущее транспортное средство потеряно.
Фиг. 11 - диаграмма характеристик целевой скорости транспортного средства, иллюстрирующая характеристики, относящиеся к целевым скоростям транспортного средства и расстоянию от рассматриваемого транспортного средства до остановленного транспортного средства в первом варианте осуществления в сценарии замедления до остановки, в котором, когда остановленное транспортное средство присутствует впереди рассматриваемого транспортного средства, рассматриваемое транспортное средство приближается, чтобы останавливаться в положении, расположенном непосредственно за остановленным транспортным средством, от движения со скоростью транспортного средства ниже предела скорости транспортного средства.
Фиг. 12 - временная диаграмма, иллюстрирующая целевые характеристики скорости транспортного средства в первом варианте осуществления в сценарии замедления при повороте, в котором, хотя ведущее транспортное средство ускоряется, появляется угол, где должно выполняться замедление.
Предпочтительные варианты осуществления изобретения
[0009] Предпочтительный вариант осуществления для реализации способа и устройства для генерирования целевой скорости транспортного средства для транспортного средства с содействием вождению согласно настоящему раскрытию будет описан ниже со ссылкой на первый вариант осуществления, проиллюстрированный на чертежах.
[0010] Сначала будет описана конфигурация. Способ и устройство для генерирования целевой скорости транспортного средства по первому варианту осуществления применяются к транспортному средству с автономным приводом (один пример транспортного средства с содействием вождению), в котором рулевое управление/движение/торможение автоматически управляются в соответствии с выбором режима автономного вождения. Конфигурация первого варианта осуществления будет описана с разбивкой на разделы «Общая конфигурация системы», «Подробная конфигурация блока генерирования команды скорости транспортного средства» и «Подробная конфигурация блока вычисления прогнозируемой команды скорости транспортного средства».
[0011] [Общая конфигурация системы]
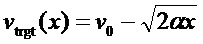
Фиг. 1 - общая схема системы, иллюстрирующая систему автономного управления вождением, в которой были применены способ и устройство для генерирования целевой скорости транспортного средства согласно первому варианту осуществления. Общая конфигурация системы будет описана ниже со ссылкой на фиг. 1.
[0012] Как показано на фиг. 1, система автономного управления вождением содержит датчики 1, блок 2 автономного управления вождением и исполнительные механизмы (актуаторы) 3. Блок 2 автономного управления вождением является компьютером, который содержит CPU или другой блок обработки и выполняет арифметическую обработку.
[0013] Датчики 1 включают в себя камеру 11 прямого распознавания, лидар/радар 12, датчики 13 скорости вращения колеса, датчик 14 скорости рыскания, карту 15 и GPS 16.
[0014] Камера 11 прямого распознавания представляет собой, например, бортовое устройство формирования изображения, содержащее ПЗС-матрицу или другой элемент формирования изображения, и может представлять собой инфракрасную камеру или стереокамеру. Камера 11 прямого распознавания установлена в заданном положении на рассматриваемом транспортном средстве и изображает объекты в областях вокруг рассматриваемого транспортного средства. Области вокруг рассматриваемого транспортного средства не ограничены областью перед рассматриваемым транспортным средством и включают области позади, с левой стороны и с правой стороны рассматриваемого транспортного средства. Объекты включают в себя линии остановки и другие двумерные знаки, которые отмечены на дорожных поверхностях. Объекты включают в себя трехмерные тела. Объекты включают в себя знаки и другие стационарные объекты. Объекты включают в себя пешеходы, ведущие транспортные средства и другие движущиеся тела. Объекты включают в себя ограждения, срединные полосы, бордюры и другие дорожные конструкции.
[0015] Лидар/радар 12 является датчиком дальности, и любой тип датчика дальности, который известен во время применения, такой как лазерный радар, радар миллиметрового диапазона, ультразвуковой радар или лазерный дальномер, может быть использован для этого. Лидар/радар 12 включает в себя устройство обнаружения объекта. Устройство обнаружения объекта обнаруживает существование объектов, положение объектов и расстояние до объектов на основе принятого сигнала и выходного сигнала от лидара/радара 12. Лидар - это датчик дальности, который излучает свет, а радар - датчик дальности, который излучает электромагнитные волны.
[0016] Датчик 13 скорости вращения колеса предусмотрен для каждого из четырех колес. Датчики 13 скорости вращения колеса определяют скорость вращения каждого колеса. Среднее значение скорости вращения левого и правого ведущих колес используется в качестве обнаруженного значения скорости транспортного средства в текущий момент времени.
[0017] Датчик 14 скорости рыскания представляет собой датчик положения, который определяет скорость рыскания транспортного средства (угловая скорость вращения вокруг вертикальной оси, проходящей через центр тяжести транспортного средства). Датчики положения включают гиродатчики, которые могут определять угол наклона, угол рыскания и угол крена транспортного средства.
[0018] Карта 15 представляет собой так называемую цифровую карту и представляет собой информацию, которая связывает широту/долготу и картографическую информацию. Карта 15 включает в себя дорожную информацию, которая была связана с соответствующими точками. Дорожная информация определяется узлами и связями, которые соединяют узлы вместе. Дорожная информация включает в себя информацию, которая определяет дороги в соответствии с положением/областью дороги, и информацию, указывающую тип каждой дороги, ширину каждой дороги и геометрию дороги. Положение перекрестков, направления приближения к перекресткам, тип перекрестка и другая информация, относящаяся к перекресткам, хранятся вместе с соответствующей идентификационной информацией для каждой дорожной связи в дорожной информации. Тип дороги, ширина дороги, геометрия дороги, разрешено ли движение вперед, отношения с преимущественным правом проезда, разрешен ли проезд (разрешен ли въезд на соседнюю полосу движения), ограничение скорости транспортного средства и другая информация, касающаяся дорог, также хранится в связи с соответствующей идентификационной информацией для каждой дорожной связи в дорожной информации.
[0019] GPS 16 (сокращение от «система глобального позиционирования») обнаруживает позицию движения (широту и долготу) рассматриваемого транспортного средства во время движения.
[0020] Блок 2 автономного управления вождением содержит блоки 21 генерирования команд скорости транспортного средства, блоки 22 вычисления прогнозируемых команд скорости транспортного средства, блок 23 согласования наименьшей команды скорости транспортного средства, блок 24 сервоуправления скоростью транспортного средства, блок 25 вычисления траектории движения рассматриваемого транспортного средства и блок 26 сервоуправления углом поворота рулевого колеса.
[0021] Блоки 21 генерирования команд скорости транспортного средства содержат первый блок 211 генерирования команд скорости транспортного средства (ACC), второй блок 212 генерирования команд скорости транспортного средства (линия остановки), третий блок 213 генерирования команд скорости транспортного средства (предел скорости транспортного средства), и четвертый блок 214 генерирования команды скорости транспортного средства (замедление при повороте). Каждый из множества блоков 211, 212, 213, 214 генерирования команд скорости транспортного средства генерирует значения команд скорости транспортного средства и целевые степени ускорения.
[0022] Блоки 22 вычисления прогнозируемых команд скорости транспортного средства включают в себя первый блок 221 вычисления прогнозируемой команды скорости транспортного средства (ACC), второй блок 222 вычисления прогнозируемой команды скорости транспортного средства (линия остановки), третий блок 223 вычисления прогнозируемой команды скорости транспортного средства (предел скорости транспортного средства) и четвертый блок 224 вычисления прогнозируемой команды скорости транспортного средства (замедление при повороте). Прогнозируемое значение команды скорости транспортного средства, которое поступает после истечения заданного промежутка времени от текущего времени, вычисляется для каждого значения команды скорости транспортного средства, сгенерированного множеством блоков 211, 212, 213, 214 генерирования команд скорости транспортного средства.
[0023] Блок 23 согласования наименьшей команды скорости транспортного средства выбирает наименьшее значение среди множества значений прогнозируемых команд скорости транспортного средства, рассчитанных блоками 221, 222, 223, 224 вычисления прогнозируемых команд скорости транспортного средства, в качестве целевой скорости транспортного средства. В то же время, в дополнение к выбору целевой скорости транспортного средства, которая имеет наименьшее значение, блок 23 согласования наименьшей команды скорости транспортного средства выбирает предел степени ускорения/замедления, который соответствует типу выбранной целевой скорости транспортного средства.
[0024] Блок 24 сервоуправления скоростью транспортного средства принимает в качестве входных данных текущую скорость транспортного средства и целевую скорость транспортного средства от блока 23 согласования наименьшей команды скорости транспортного средства, получает значение команды управления с использованием сервоуправления скоростью транспортного средства и выводит результат этого получения к исполнительному механизму 31 управления вождением и исполнительному механизму 32 управления тормозом.
В качестве способа получения значения команды управления с использованием сервоуправления скоростью транспортного средства, например, выполняется управление с прямой связью и управление с обратной связью, которое объединяет управление с прямой связью, которое соответствует значению или скорости изменения целевых скоростей транспортного средства, и управление с обратной связью, которое соответствует разнице между целевой скоростью транспортного средства и текущей скоростью транспортного средства. Отклонение от целевого значения из-за уклонов дороги или тому подобного также следует принимать во внимание, когда это выполняется.
[0025] Блок 25 вычисления траектории движения рассматриваемого транспортного средства вычисляет траекторию движения рассматриваемого транспортного средства по дорогам, по которым ожидается движение рассматриваемого транспортного средства. Первый вариант осуществления использует блок 211a вычисления траектории движения рассматриваемого транспортного средства, содержащийся в первом блоке 211 генерирования команды скорости транспортного средства (ACC).
[0026] Блок 26 сервоуправления углом поворота рулевого колеса получает информацию о траектории движения рассматриваемого транспортного средства от блока 25 вычисления траектории движения рассматриваемого транспортного средства в качестве входных данных и, например, выбирает целевую скорость рыскания таким образом, чтобы рассматриваемое транспортное средство следовало траектории движения. Блок 26 сервоуправления углом поворота рулевого колеса получает значение управления углом поворота рулевого колеса так, что фактическая скорость рыскания соответствует целевой скорости рыскания, и выводит результат этого получения в исполнительный механизм 33 управления углом поворота рулевого колеса.
[0027] Исполнительные механизмы 3 включают в себя исполнительный механизм 31 управления вождением, исполнительный механизм 32 управления тормозом и исполнительный механизм 33 управления углом поворота рулевого колеса.
[0028] В случае транспортного средства с двигателем исполнительный механизм 31 управления вождением является исполнительным механизмом привода двигателя, в случае гибридного транспортного средства исполнительный механизм 31 управления вождением является исполнительным механизмом привода двигателя и исполнительным механизмом привода мотора, и в случае электромобиля исполнительный механизм 31 управления вождением является исполнительным механизмом привода мотора. Исполнительный механизм 32 управления тормозом представляет собой электрический усилитель тормозов, гидроусилитель и т.д. Исполнительный механизм 33 управления углом поворота рулевого колеса представляет собой мотор управления углом поворота рулевого колеса, предусмотренный в системе рулевого управления.
[0029] [Подробная конфигурация блоков генерирования команд скорости транспортного средства]
Подробная конфигурация блоков 21 генерирования команд скорости транспортного средства будет описана ниже со ссылкой на фиг. 2-6.
[0030] Как показано на фиг. 2, первый блок 211 генерирования команды скорости транспортного средства (ACC) включает в себя блок 211a вычисления траектории движения рассматриваемого транспортного средства, блок 211b получения расстояния интервала и относительной скорости транспортного средства и блок 211c вычисления команды скорости транспортного средства. Блок 211a вычисления траектории движения рассматриваемого транспортного средства использует датчик 14 скорости рыскания и датчики 13 скорости вращения колеса в качестве датчиков прогнозирования траектории рассматриваемого транспортного средства и вычисляет траекторию движения рассматриваемого транспортного средства. Блок 211b получения расстояния интервала и относительной скорости транспортного средства использует камеру 11 прямого распознавания и/или лидар/радар 12 в качестве датчика (датчиков) обнаружения ведущего транспортного средства и получает расстояние интервала и относительную скорость транспортного средства для ведущего транспортного средства. Блок 211c вычисления команд скорости транспортного средства вычисляет значение команды скорости транспортного средства (ACC) и целевую степень ускорения, необходимую для того, чтобы рассматриваемое транспортное средство следовало за ведущим транспортным средством, в соответствии с полученным расстоянием интервала и относительной скоростью транспортного средства, а также с информацией о текущей скорости транспортного средства.
[0031] Профили скорости транспортного средства для целевых скоростей транспортного средства, состоящих из постоянных скоростей и ускорения/замедления, в зависимости, среди прочего, от присутствия или отсутствия ведущего транспортного средства, вырабатываются в блоке 211c вычисления команд скорости транспортного средства. Значения команды скорости транспортного средства (целевые скорости транспортного средства) определяются в соответствии с положением за пределами текущего положения с использованием созданного профиля скорости транспортного средства. В таких случаях степень ускорения или степень замедления, требуемая для достижения целевой скорости транспортного средства в заданном положении вдали от текущего положения транспортного средства, задается в качестве целевой степени ускорения.
[0032] В данном документе «ACC (сокращение от «адаптивный круиз-контроль»)» обозначает, когда обнаруживается ведущее транспортное средство, установление скорости транспортного средства, установленной водителем, в качестве максимальной скорости транспортного средства, и выполнение управления интервалом, чтобы поддерживать расстояние интервала при соответствующей скорости транспортного средства. Когда ведущее транспортное средство не обнаружено, движение с постоянной скоростью выполняется на скорости транспортного средства, установленной водителем. Кроме того, когда ведущее транспортное средство остановилось, рассматриваемое транспортное средство также останавливается после ведущего транспортного средства.
[0033] Как проиллюстрировано на фиг. 3, второй блок 212 генерирования команды скорости транспортного средства (линия остановки) включает в себя блок 212a получения относительного расстояния до линии остановки и блок 212b вычисления команды скорости транспортного средства. Блок 212a получения относительного расстояния до линии остановки использует GPS 16 плюс карту 15 и/или камеру 11 прямого распознавания для определения расстояния от рассматриваемого транспортного средства до линии остановки. Блок 212b вычисления команд скорости транспортного средства вычисляет значение команды скорости транспортного средства (линия остановки) и целевую степень ускорения, необходимую для замедления и остановки в пределах полученного относительного расстояния до линии остановки.
[0034] Как показано на фиг. 4, профиль скорости транспортного средства (то есть профиль целевой скорости транспортного средства), представляющий изменение целевой скорости транспортного средства при замедлении с постоянной степенью замедления α, создается в блоке 212b вычисления команды скорости транспортного средства на основе скорости транспортного средства при начальном замедлении ν0 и расстояния dtrgt от рассматриваемого транспортного средства до линии остановки. Профиль скорости транспортного средства νtrgt(x) выражается следующим уравнением.
В полученном профиле скорости транспортного средства νtrgt(x) значения команды скорости транспортного средства (целевые скорости транспортного средства) определяются в соответствии с положением x за положением начального замедления x0. В таких случаях постоянная степень замедления α устанавливается в качестве целевой степени ускорения.
[0035] Как показано на фиг. 5, третий блок 213 генерирования команды скорости транспортного средства (предел скорости транспортного средства) включает в себя блок 213a получения предела скорости транспортного средства и блок 213b вычисления команды скорости транспортного средства. Блок 213a получения предела скорости транспортного средства использует GPS 16 плюс карту 15 и/или камеру 11 прямого распознавания в качестве датчика получения предела скорости транспортного средства для получения информации о пределе скорости транспортного средства для дорог. Блок 213b вычисления команд скорости транспортного средства вычисляет значение команды скорости транспортного средства (предел скорости транспортного средства) и целевую степень ускорения, требуемую для соблюдения полученного предела скорости транспортного средства.
[0036] В соответствии с полученным пределом скорости транспортного средства в блоке 213b вычисления команд скорости транспортного средства формируется профиль скорости транспортного средства для целевых скоростей транспортного средства, которые поддерживают скорость рассматриваемого транспортного средства на уровне или ниже предела скорости транспортного средства. Значения команды скорости транспортного средства (целевые скорости транспортного средства) определяются в соответствии с положением за пределами текущего положения с использованием созданного профиля скорости транспортного средства. В таких случаях степень ускорения или степень замедления, требуемая для достижения целевой скорости транспортного средства в заданном положении вдали от текущего положения транспортного средства, задается в качестве целевой степени ускорения.
[0037] Как показано на фиг. 6, четвертый блок 214 генерирования команды скорости транспортного средства (замедление при повороте) включает в себя блок 214а получения информации о кривизне дороги и блок 214b вычисления команды скорости транспортного средства. Блок 214a получения информации о кривизне дороги использует GPS 16 плюс карту 15 и/или камеру 11 прямого распознавания в качестве датчика получения кривизны для получения кривизны дороги, по которой осуществляется движение. Блок 214b вычисления команды скорости транспортного средства вычисляет значение команды скорости транспортного средства (замедление при повороте) и целевую степень ускорения, не превышающую максимальную боковую степень ускорения, которая устанавливается заранее в соответствии с полученной информацией о кривизне дороги.
[0038] Профиль скорости транспортного средства для целевых скоростей транспортного средства для выхода из поворота в соответствии с полученной кривизной дороги, по которой осуществляется движение, создается в блоке 214b вычисления команды скорости транспортного средства. Значения команды скорости транспортного средства (целевые скорости транспортного средства) определяются в соответствии с положением за пределами текущего положения с использованием созданного профиля скорости транспортного средства. В таких случаях степень ускорения или степень замедления, требуемая для достижения целевой скорости транспортного средства в заданном положении за пределами текущего положения, задается в качестве целевой степени ускорения.
[0039] [Подробная конфигурация блоков вычисления прогнозируемой команды скорости транспортного средства]
Подробная конфигурация блоков 22 вычисления прогнозируемой команды скорости транспортного средства будет описана ниже со ссылкой на фиг. 7. Базовая конфигурация каждого из первого блока 221 вычисления прогнозируемой команды скорости транспортного средства (ACC), второго блока 222 вычисления прогнозируемой команды скорости транспортного средства (линия остановки), третьего блока 223 вычисления прогнозируемой команды скорости транспортного средства (предел скорости транспортного средства) ограничить), и четвертого блока 224 вычисления прогнозируемой команды скорости транспортного средства (замедление при повороте) показана на фиг. 7.
[0040] Как проиллюстрировано на фиг. 7, каждый из блоков 221 (222, 223, 224) вычисления прогнозируемой команды скорости транспортного средства включает в себя блок 22a вычисления прогнозируемой команды скорости транспортного средства, блок 22b вычисления необходимой степени ускорения, блок 22c вычисления команды скорости транспортного средства, блок 22d ограничения скорости транспортного средства и блок 22e подавления/предотвращения ускорения.
[0041] Блок 22a вычисления прогнозируемой команды скорости транспортного средства принимает в качестве входных данных целевую степень ускорения и значение команды скорости транспортного средства («старое значение команды скорости транспортного средства» на фиг. 7) в текущий момент времени из соответствующего блока 211 генерирования команды скорости транспортного средства (212, 213, 214) и промежуток времени для прогнозирования. Блок 22a вычисления прогнозируемой команды скорости транспортного средства вычисляет значение прогнозируемой команды скорости транспортного средства, которое поступает после истечения промежутка времени для прогнозирования, на основе значения команды скорости транспортного средства для текущего момента времени и целевой степени ускорения. Другими словами, в профилях скорости транспортного средства, сгенерированных блоками 211, 212, 213, 214 генерирования команды скорости транспортного средства, значения команды скорости транспортного средства (целевые скорости транспортного средства), которые приходят после истечения заданного промежутка времени для прогнозирования от текущего момента времени, вычисляются как прогнозируемые значения команды скорости транспортного средства.
[0042] Что касается установки «промежутка времени для прогнозирования», то «промежуток времени для прогнозирования» задается с использованием промежутка времени, который может изменяться (например, приблизительно от 2с до 5с) в соответствии с условиями (а)-(г), приведенными ниже.
(a) Когда промежуток времени для прогнозирования изменяется в соответствии с целевым поведением ускорения/замедления, в ситуациях, когда требуется управление с задержкой отклика, промежуток времени для прогнозирования устанавливается на более длительный промежуток времени, чем в ситуациях, когда желателен контроль с усиленным откликом.
(б) В ситуациях, когда значение команды скорости транспортного средства является значением команды скорости транспортного средства, относящимся к пределу скорости транспортного средства (третий блок 223 вычисления прогнозируемой команды скорости транспортного средства), промежуток времени для прогнозирования устанавливается более длительным, чем для другого значения команды скорости транспортного средства.
(в) Когда промежуток времени для прогнозирования изменяется в соответствии с целевым поведением ускорения/замедления, в ситуациях, когда требуется управление с усиленным откликом, промежуток времени для прогнозирования устанавливается на более короткий промежуток времени, чем в ситуациях, когда требуется управление с задержкой отклика.
(г) В ситуациях, когда значение команды скорости транспортного средства представляет собой значение команды скорости транспортного средства, относящееся к следованию за ведущим транспортным средством (блок 221 вычисления прогнозируемой команды скорости транспортного средства), промежуток времени для прогнозирования устанавливается короче, чем для другого значения команды скорости транспортного средства.
[0043] Блок 22b вычисления требуемой степени ускорения принимает в качестве входных данных прогнозируемое значение команды скорости транспортного средства из блока 22a вычисления прогнозируемой команды скорости транспортного средства и значение команды скорости транспортного средства, следующее за самым последним. Блок 22b вычисления требуемой степени ускорения вычисляет степень ускорения, требуемую для достижения самого последнего прогнозируемого значения команды скорости транспортного средства, исходя из значения команды скорости транспортного средства, следующего за самым последним.
[0044] Блок 22c вычисления команды скорости транспортного средства принимает в качестве входных данных требуемую степень ускорения, вычисленную посредством блока 22b вычисления требуемой степени ускорения, и период вычисления (интервал выборки). Блок 22c вычисления команды скорости транспортного средства вычисляет значение команды скорости транспортного средства для текущего времени из требуемой степени ускорения, периода вычисления и значения команды скорости транспортного средства, следующего за самым последним.
[0045] Блок 22d ограничения скорости транспортного средства принимает в качестве входных данных значение команды скорости транспортного средства для текущего времени, вычисленное блоком 22c вычисления команды скорости транспортного средства, и текущую скорость транспортного средства. Когда значение команды скорости транспортного средства для текущего времени превышает диапазон скоростей транспортного средства, из которого может обрабатываться целевая скорость транспортного средства, которая выбрана на основе текущей скорости транспортного средства, значение команды скорости транспортного средства для текущего времени ограничивается диапазоном скоростей транспортного средства, из которого может обрабатываться целевая скорость транспортного средства.
Здесь «диапазон скоростей транспортного средства, из которого может обрабатываться целевая скорость транспортного средства» относится к диапазону целевых скоростей транспортного средства, к которым разрешено изменение скорости транспортного средства от текущей скорости транспортного средства. Это, например, выбирается с использованием диапазона скоростей транспортного средства от минимальной скорости транспортного средства, полученной путем вычитания из текущей скорости транспортного средства диапазона допустимого отклонения скорости транспортного средства на стороне замедления, до максимальной скорости транспортного средства, полученной путем сложения с текущей скоростью транспортного средства диапазона допустимого отклонения скорости транспортного средства на стороне ускорения.
[0046] Блок 22e подавления/предотвращения ускорения принимает в качестве входных данных старую команду скорости транспортного средства от соответствующего блока 211 генерирования команды скорости транспортного средства (212, 213, 214), максимальную степень ускорения, необходимую степень ускорения от блока 22b вычисления необходимой степени ускорения и новую команду скорости транспортного средства из блока 22d ограничения скорости транспортного средства. В ситуациях, когда необходимая степень ускорения превысила максимальную степень ускорения, которая установлена заранее, вместо выбора новой команды скорости транспортного средства (самое последнее прогнозируемое значение команды скорости транспортного средства), блок 22e подавления/предотвращения ускорения выбирает старую команду скорости транспортного средства (значение команды скорости транспортного средства, следующее за самым последним). Значение команды скорости транспортного средства, выбранное блоком 22e подавления/предотвращения ускорения, устанавливается как конечное значение команды скорости транспортного средства (целевая скорость транспортного средства), выводимое в блок 23 согласования наименьшей команды скорости транспортного средства.
[0047] Далее будет описана операция. Операция по первому варианту осуществления будет описана с разбивкой на разделы «Операция для генерирования целевой скорости транспортного средства в сравнительном варианте», «Операция для процесса генерирования целевой скорости транспортного средства», «Операция для генерирования целевой скорости транспортного средства при сценарии замедления до остановки, в котором есть линия остановки», «операция для генерирования целевой скорости транспортного средства в сценарии замедления до остановки, в которой остановлено транспортное средство», и «операция для генерирования целевой скорости транспортного средства в сценарии замедления при повороте».
[0048] [Операция для генерирования целевой скорости транспортного средства в сравнительном варианте осуществления]
На фиг. 9 показаны характеристики целевой скорости транспортного средства (наименьшее значение) в сценарии движения, в котором сразу же после начала замедления до предела скорости из-за появления тумана ведущее транспортное средство теряется. Операция для генерирования целевой скорости транспортного средства в сравнительном варианте осуществления будет описана ниже со ссылкой на фиг. 9.
[0049] Для начала сравнительный вариант осуществления включает в себя блок генерирования команды скорости транспортного средства (ACC) и блок генерирования команды скорости транспортного средства (ограничение скорости транспортного средства), которые служат в качестве блоков генерирования команды скорости транспортного средства, и самое низкое значение среди значений команды скорости транспортного средства, сгенерированных двумя блоками генерирования команды скорости транспортного средства, устанавливается в качестве целевой скорости транспортного средства.
[0050] Здесь замедление до предела скорости из-за появления тумана начинается в момент времени t0, и ведущее транспортное средство теряется в момент времени t1 сразу после начала замедления. В этой ситуации значения команды скорости транспортного средства (то есть целевые скорости транспортного средства с ограниченной скоростью), генерируемые блоком генерирования команды скорости транспортного средства (предел скорости транспортного средства), являются большими значениями команды скорости транспортного средства вплоть до момента времени t0 и имеют характеристики значения команды скорости транспортного средства, которые падают с постоянной степенью замедления от времени t0 до времени t3 и остаются на пределе скорости транспортного средства (туман) после времени t3. Значения команды скорости транспортного средства (т.е. целевые скорости транспортного средства для следования за ведущим транспортным средством), сгенерированные блоком генерирования команды скорости транспортного средства (ACC), являются значениями команды скорости транспортного средства, использующими управление интервалом, чтобы следовать за ведущим транспортным средством до момента времени t1, и иметь характеристику значения команды скорости транспортного средства, которая мгновенно увеличивается, чтобы вернуться к заданной водителем скорости транспортного средства по достижении времени t1. В блоке генерирования команды скорости транспортного средства (ACC) установленная водителем скорость транспортного средства поддерживается вне характеристик значения команды скорости транспортного средства.
[0051] Когда целевые характеристики скорости транспортного средства получены, выбирая самые низкие значения среди значений команды скорости транспортного средства, сгенерированных двумя блоками генерирования команды скорости транспортного средства, характеристика целевой скорости транспортного средства до момента времени t1 следует за характеристикой целевой скорости транспортного средства для следования за ведущим транспортным средством. По достижении времени t1 характеристика целевой скорости транспортного средства мгновенно возрастает до установленной водителем скорости транспортного средства от скорости рассматриваемого транспортного средства в то время, когда ведущее транспортное средство было потеряно. Характеристика целевой скорости транспортного средства от времени t1 до времени t2 является скоростью транспортного средства, которая остается постоянной в соответствии с заданной водителем характеристикой скорости транспортного средства, и после времени t2 следует характеристике предела скорости.
[0052] Таким образом, как показано характеристиками целевой скорости транспортного средства, заключенными в стрелку А на фиг. 9, создается ненужное ускорение, несмотря на знание того, что предстоит замедление из-за того, что характеристика целевой скорости транспортного средства мгновенно возрастает до установленной водителем скорости транспортного средства в момент времени t1 от скорости рассматриваемого транспортного средства на момент потери ведущего транспортного средства. Кроме того, из-за задержки в реагировании на целевую скорость транспортного средства фактическая скорость транспортного средства для рассматриваемого транспортного средства будет переходить от ускорения к замедлению сразу после времени t2, и в этот момент будет большая величина рывка (изменение степени ускорения) при переходе от ускорения (положительная степень ускорения) к замедлению (отрицательная степень ускорения). В транспортном средстве с содействием вождению, таком как транспортное средство с автономным приводом, потому что это «ненужное ускорение» и «большая величина рывка» не связаны с операцией ускорения или торможением водителем, а непреднамеренны для водителя, водителю передается неприятное ощущение. Точно так же это «ненужное ускорение» и «большая величина рывка» являются неприятными ощущениями и для попутчиков.
[0053] Ради аргумента, чтобы подавить «ненужное ускорение» в сравнительном варианте, предположим, что реализована контрмера, в которой запрещены ускорение и изменение целевой скорости транспортного средства. В этой ситуации возникнет проблема, когда, например, когда была выбрана целевая скорость транспортного средства, которая соответствует линии остановки, ускорение рассматриваемого транспортного средства запрещено даже в ситуациях, когда расстояние до линии остановки довольно велико, и различия в скорости транспортного средства между рассматриваемым транспортным средством и другими транспортными средствами в области вокруг рассматриваемого транспортного средства может препятствовать потоку движения.
[0054] [Операция для процесса генерирования целевой скорости транспортного средства]
Фиг. 8 иллюстрирует последовательность операций для генерирования целевой скорости транспортного средства, выполняемого блоком 2 автономного управления вождением в первом варианте осуществления. Каждый этап на фиг. 8 будет описан ниже.
[0055] Когда начинается генерирование целевой скорости транспортного средства, информация о целевой скорости транспортного средства и степени ускорения получается на этапе S1, затем процесс переходит к этапу S2.
В данном документе «получение информации о целевой скорости транспортного средства и степени ускорения» относится к получению в блоках 221-224 вычисления прогнозируемых команд скорости транспортного средства значения команды скорости транспортного средства (целевой скорости транспортного средства) и целевой степени ускорения, генерируемых в каждом блоке 211-214 генерирования команды скорости.
[0056] После получения информации о целевой скорости транспортного средства и степени ускорения на этапе S1 на этапе S2 устанавливается промежуток времени для прогнозирования, затем процесс переходит к этапу S3. В данном документе «установка промежутка времени для прогнозирования» относится к промежутку времени для прогнозирования, установленному на промежуток времени, который может изменяться в блоке 22a вычисления прогнозируемой команды скорости транспортного средства в соответствии с условиями (a)-(г) как описано выше.
[0057] После установки промежутка времени для прогнозирования на этапе S2 целевая скорость транспортного средства, которая поступает после промежутка времени промежуток времени, вычисляется на этапе S3, затем процесс переходит к этапу S4. В данном документе «вычисление целевой скорости транспортного средства, которая поступает после промежутка времени для прогнозирования», относится к вычислению прогнозируемого значения команды скорости транспортного средства (целевой скорости транспортного средства), которое поступает после истечения промежутка времени для прогнозирования на основе целевой степени ускорения и значения команды скорости транспортного средства в текущий момент времени в блоке 22a вычисления прогнозируемой команды скорости транспортного средства.
[0058] После вычисления целевой скорости транспортного средства, которая поступает после промежутка времени для прогнозирования на этапе S3, степень ускорения для достижения целевой скорости транспортного средства до промежутка времени для прогнозирования, вычисляется на этапе S4, затем процесс переходит к этапу S5. В данном документе «вычисление степени ускорения для достижения целевой скорости транспортного средства до промежутка времени для прогнозирования» относится к вычислению степени ускорения, необходимой для достижения самого последнего прогнозируемого значения команды скорости транспортного средства (целевой скорости транспортного средства до промежутка времени для прогнозирования) из значения команды скорости транспортного средства, следующего за самым последним (целевого значения скорости транспортного средства, следующего за самым последним) в блоке 22b вычисления требуемой степени ускорения.
[0059] После вычисления степени ускорения для достижения целевой скорости транспортного средства до промежутка времени для прогнозирования на этапе S4, период вычисления получается на этапе S5, затем процесс переходит к этапу S6. Здесь «получение периода вычисления» относится к получению периода вычисления (интервала выборки) в блоке 22c вычисления команды скорости транспортного средства.
[0060] После получения периода вычисления на этапе S5 целевая скорость транспортного средства для текущего времени вычисляется на этапе S6, и процесс переходит к этапу S7. Здесь «вычисление целевой скорости транспортного средства для текущего времени» относится к вычислению значения команды скорости транспортного средства (целевой скорости транспортного средства) для текущего времени из требуемой степени ускорения, периода вычисления (интервала выборки) и значения команды скорости транспортного средства, следующего за самым последним, в блоке 22c вычисления команды скорости транспортного средства.
[0061] После вычисления целевой скорости транспортного средства для текущего времени на этапе S6 целевая скорость транспортного средства выбирается (наименьшее значение) посредством согласования с другими значениями команды скорости транспортного средства на этапе S7, и процесс переходит к концу генерирования целевой скорости транспортного средства.
Здесь «выбор целевой скорости транспортного средства посредством согласования с другими значениями команд скорости транспортного средства» относится к выбору наименьшего значения из множества прогнозируемых значений команды скорости транспортного средства, рассчитанных с помощью блоков 221, 222, 223, 224 вычисления прогнозируемых команд скорости транспортного средства, в качестве целевой скорости транспортного средства в блоке 23 согласования наименьшей команды скорости транспортного средства.
[0062] Таким образом, когда начинается генерирование целевой скорости транспортного средства, этапы продвигаются в порядке этап S1 → этап S2 → этап S3 → этап S4 → этап S5 → этап S6 → этап S7, затем генерирование целевой скорости транспортного средства заканчивается. Другими словами, в блоках 22 вычисления прогнозируемых команд скорости транспортного средства прогнозируемое значение команды скорости транспортного средства, которое приходит после истечения заданного промежутка времени от настоящего времени, вычисляется для каждого значения команды скорости транспортного средства, сгенерированного посредством множества блоков 211-214 генерирования команд скорости транспортного средства. Затем в блоке 23 согласования наименьшей команды скорости транспортного средства в качестве целевой скорости транспортного средства выбирается наименьшее значение из множества прогнозируемых значений команды скорости транспортного средства, рассчитанных с помощью блоков 221-224 вычисления прогнозируемых команд скорости транспортного средства.
[0063] Посредством выбора наименьшего значения из множества прогнозируемых значений команды скорости транспортного средства в качестве целевой скорости транспортного средства может быть подавлено ненужное ускорение, и, кроме того, рывок во время перехода от ускорения к замедлению может быть уменьшен при движении с использованием автономного вождения или т.п. Кроме того, например, когда была выбрана целевая скорость транспортного средства, которая соответствует линии остановки, ускорение рассматриваемого транспортного средства допускается в ситуациях, когда расстояние до линии остановки больше, чем расстояние, достигнутое рассматриваемым транспортным средством за промежуток времени для прогнозирования, и скорость транспортного средства, которая наступает через промежуток времени для прогнозирования, выше, чем скорость транспортного средства в настоящий момент времени. Вследствие этого, благодаря реализации выбора «низкого уровня» для прогнозируемых значений команды скорости транспортного средства, а не технологии, которая просто запрещает ускорение, можно избежать препятствия потоку движения.
[0064] [Операция для генерирования целевой скорости транспортного средства в сценарии замедления до остановки, в котором имеется линия остановки]
На фиг. 10 показаны характеристики целевой скорости транспортного средства (самые низкие прогнозируемые скорости транспортного средства) в сценарии замедления до остановки, в котором после начала замедления к предстоящей линии остановки ведущее транспортное средство теряется. Операция для генерирования целевой скорости транспортного средства в сценарии замедления до остановки, в котором есть линия остановки, будет описана ниже со ссылкой на фиг. 10.
[0065] Здесь замедление из-за обнаружения линии остановки начинается в момент времени t0, и ведущее транспортное средство теряется в момент времени t2 после того, как начинается замедление. В этой ситуации значения команды скорости транспортного средства, сгенерированные первым блоком 211 генерирования команды скорости транспортного средства (ACC), являются установленными водителем скоростями транспортного средства вплоть до момента времени t1 и в течение этого периода отсутствует ведущее транспортное средство, и эти значения команды скорости транспортного средства являются значениями команды скорости транспортного средства с использованием управления интервалом для следования за ведущим транспортным средством с момента t1 до момента t2 и в течение этого периода существует ведущее транспортное средство. Эти значения команды скорости транспортного средства имеют характеристику значения команды скорости транспортного средства, которая мгновенно увеличивается для возврата к установленной водителем скорости транспортного средства по достижении времени t2. Значения команды скорости транспортного средства, сгенерированные вторым блоком 212 генерирования команды скорости транспортного средства (линия остановки), являются большими значениями команды скорости транспортного средства вплоть до момента времени t0 и имеют характеристики значения команды скорости транспортного средства, которые падают с постоянной степенью замедления от времени t0 к времени t6 и от времени t6 до времени t7, следуя характеристике линии останова для степени замедления, которая приводит к плавной остановке. Значения команды скорости транспортного средства, сгенерированные третьим блоком 213 генерирования команды скорости транспортного средства (предел скорости транспортного средства), имеют характеристику значения команды скорости транспортного средства, которая поддерживается на постоянном пределе скорости транспортного средства независимо от времени.
[0066] Когда характеристики целевой скорости транспортного средства (характеристики толстой сплошной линии) получены, выбирая самые низкие значения среди значений команды скорости транспортного средства, сгенерированных тремя блоками 211, 212, 213 генерирования команды скорости транспортного средства, характеристика целевой скорости транспортного средства от времени t1 до времени t2 следует за характеристикой целевой скорости транспортного средства для следования за ведущим транспортным средством. По достижении времени t2 характеристика целевой скорости транспортного средства мгновенно возрастает до предела скорости транспортного средства от скорости рассматриваемого транспортного средства в момент, когда ведущее транспортное средство было потеряно. Характеристика целевой скорости транспортного средства от времени t2 до времени t3 является скоростью транспортного средства, которая остается постоянной в соответствии с характеристикой предела скорости транспортного средства, и после времени t3 следует характеристика линии остановки.
[0067] В отличие от этого, характеристики целевой скорости транспортного средства (характеристики, выделенные толстой пунктирной линией) получены, выбирая самые низкие значения среди прогнозируемых значений команды скорости транспортного средства, которые приходят после истечения промежутка времени для прогнозирования (от времени t2 до времени t4 на фиг. 10) для каждого значения команды скорости транспортного средства, сгенерированного тремя блоками 211, 212, 213 генерирования команды скорости транспортного средства. В этой ситуации после достижения времени t2 целевая скорость транспортного средства выбирается на основе наименьшего значения из прогнозируемых значений команды скорости транспортного средства в момент времени t4, в результате чего практически не происходит изменений от фактической скорости транспортного средства для рассматриваемого транспортного средства в момент времени t2. После времени t2, поскольку целевая скорость транспортного средства в каждом интервале выборки Δt выбирается на основе наименьшего значения из прогнозируемых значений команды скорости транспортного средства в промежуток времени для прогнозирования, характеристика, связывающая целевые скорости транспортного средства, выбранные в каждом интервале выборки Δt плавно замедляется от времени t2 до времени t5. После времени t5 следует характеристика линии остановки.
[0068] Таким образом, как ясно из сравнения характеристик целевой скорости транспортного средства (характеристики толстой сплошной линии и характеристики толстой пунктирной линии), заключенных в стрелку B на фиг. 10, характеристики целевой скорости транспортного средства (характеристики толстой пунктирной линии) в первом варианте осуществления являются характеристиками, в которых характеристики целевой скорости транспортного средства (характеристики толстой сплошной линии) в сравнительном варианте осуществления сдвигаются в сторону замедления. Следовательно, из-за генерирования целевых скоростей транспортного средства на основе прогнозируемых значений команды скорости транспортного средства, когда известно, что предстоит замедление, создание ненужного ускорения, такого как в сравнительном варианте осуществления, подавляется. Кроме того, поскольку характеристики целевой скорости транспортного средства в первом варианте осуществления плавно замедляются со времени t2 до момента t5, рывок при переключении с ускорения на замедление практически исключается, или рывок уменьшается до небольшой величины.
[0069] В результате, из-за проявления функциональности подавления поведения транспортного средства, необходимой в ситуациях, связанных с транспортным средством с содействием вождению, таким как транспортное средство с автономным приводом, неприятное ощущение не передается водителю или попутчикам. Кроме того, благодаря выбору наименьшего значения из множества прогнозируемых значений команды скорости транспортного средства в качестве целевой скорости транспортного средства, из множества прогнозируемых значений команды управления скоростью транспортного средства формируется план скорости транспортного средства, в котором обеспечивается безопасность движения. Первый вариант осуществления также будет отображать операцию для генерирования целевой скорости транспортного средства, которая аналогична ситуации, в которой замедление начинается в направлении предстоящей линии остановки в сценарии движения, таком как в сравнительном варианте осуществления, в котором сразу после начала замедления до предела скорости из-за появления тумана, ведущий автомобиль теряется.
[0070] [Операция для генерирования целевой скорости транспортного средства в сценарии замедления до остановки, в котором остановлено транспортное средство]
Фиг. 11 иллюстрирует характеристики, относящиеся к целевым скоростям транспортного средства и расстоянию от рассматриваемого транспортного средства до остановленного транспортного средства в первом варианте осуществления в сценарии замедления до остановки, в котором, когда остановленное транспортное средство присутствует перед рассматриваемым транспортным средством, рассматриваемое транспортное средство останавливается в положении, расположенном непосредственно за остановленным транспортным средством, при движении со скоростью транспортного средства ниже предела скорости транспортного средства. Операция для генерирования целевой скорости транспортного средства в сценарии замедления до остановки, в котором остановлено транспортное средство, будет описана ниже со ссылкой на фиг. 11.
[0071] В этом сценарии замедления до остановки, в котором остановлено транспортное средство, положение заднего колеса рассматриваемого транспортного средства, когда распознается остановленное транспортное средство, обозначается как x0, положение заднего колеса рассматриваемого транспортного средства при замедлении и остановке обозначается как x1, а расстояние от положения x0 до переднего конечного положения рассматриваемого транспортного средства обозначается как dmin. Здесь расстояние от переднего конечного положения рассматриваемого транспортного средства в положении x0 до переднего конечного положения рассматриваемого транспортного средства в положении x1 составляет d (= e+dmin), и необходимо, чтобы скорость транспортного средства для рассматриваемого транспортного средства была доведена до нуля (остановился) со скорости транспортного средства ν0 в положении x0 в пределах этого расстояния d.
[0072] В этой ситуации, в результате того, что рассматриваемое транспортное средство, которое движется со скоростью транспортного средства ниже предела скорости транспортного средства, распознает остановленное транспортное средство как ведущее транспортное средство в положении x0, значения команды скорости транспортного средства, сформированные первым блоком 211 генерирования команды скорости транспортного средства (ACC) мгновенно увеличивается из-за управления интервалом, которое следует за ведущим транспортным средством. После положения x0 эти значения команды скорости транспортного средства имеют характеристику значения команды скорости транспортного средства, которая постепенно снижается в направлении положения x1 из-за управления интервалом. Значения команды скорости транспортного средства, сгенерированные вторым блоком 212 генерирования команды скорости транспортного средства (линия остановки), имеют характеристику значения команды скорости транспортного средства, которая поддерживается на постоянной скорости транспортного средства для линии остановки, независимо от времени из-за отсутствия распознавания линии остановки. Значения команды скорости транспортного средства, сгенерированные третьим блоком 213 генерирования команды скорости транспортного средства (предел скорости транспортного средства), имеют характеристику значения команды скорости транспортного средства, которая поддерживается на постоянном пределе скорости транспортного средства (< скорость транспортного средства для линии остановки) независимо от времени.
[0073] Когда характеристики целевой скорости транспортного средства (характеристики толстой сплошной линии) получены, выбирая самое низкое значение среди значений команды скорости транспортного средства, сгенерированных тремя блоками 211, 212, 213 генерирования команды скорости транспортного средства, происходит мгновенный рост вслед за характеристикой целевой скорости транспортного средства для следования за ведущим транспортным средством до предела скорости транспортного средства от скорости рассматриваемого транспортного средства в положении x0. Характеристика целевой скорости транспортного средства от положения x0 до положения x01 является скоростью транспортного средства, которая остается постоянной в соответствии с характеристикой предела скорости транспортного средства, и после положения x01 следует характеристика целевого значения скорости транспортного средства для следования за ведущим транспортным средством.
[0074] В отличие от этого, характеристики целевой скорости транспортного средства (характеристики, выделенные толстой пунктирной линией) получены, выбирая наименьшее значение среди прогнозируемых значений команды скорости транспортного средства, которые поступают после истечения промежутка времени для прогнозирования для каждого значения команды скорости транспортного средства, сгенерированного с помощью трех блоков 211, 212, 213 генерирования команд скорости транспортного средства. В этой ситуации при достижении положения x0 целевая скорость транспортного средства в каждом интервале выборки Δt выбирается на основе наименьшего значения из прогнозируемых значений команды скорости транспортного средства в промежуток времени для прогнозирования. Из-за этого характеристика, связывающая целевые скорости транспортного средства, выбранные в каждом интервале выборки Δt, является плавной характеристикой, которая перемещается от плавного ускорения к плавному замедлению, направляющему в положение x02 из положения x0. После положения x02 следует характеристика целевой скорости движения транспортного средства для следования за ведущим транспортным средством, которая является характеристикой замедления.
[0075] Таким образом, как ясно из сравнения характеристик целевой скорости транспортного средства (характеристики толстой сплошной линии и характеристики толстой пунктирной линии), заключенных в стрелку С на фиг. 11, характеристики целевой скорости транспортного средства (характеристики толстой пунктирной линии) в первом варианте осуществления являются характеристиками, в которых характеристики целевой скорости транспортного средства (характеристики толстой сплошной линии) в сравнительном варианте осуществления сдвинуты в сторону замедления. Следовательно, из-за генерирования целевых скоростей транспортного средства на основе прогнозируемых значений команды скорости транспортного средства, когда известно, что предстоит замедление, создание ненужного ускорения, такого как в сравнительном варианте осуществления, подавляется. Кроме того, поскольку характеристики целевой скорости транспортного средства в первом варианте осуществления имеют плавную характеристику, которая перемещается от плавного ускорения к плавному замедлению в направлении x02 из положения x0, рывок при переключении с ускорения на замедление уменьшается до небольшой величины. Таким образом, создание ускорения для приближения к пределу скорости транспортного средства подавляется в сценарии замедления до остановки, в котором, когда остановленное транспортное средство присутствует перед рассматриваемым транспортным средством, рассматриваемое транспортное средство останавливается в положении сразу за остановленным транспортным средством от движения на скорости транспортного средства ниже предела скорости транспортного средства.
[0076] [Операция для генерирования целевой скорости транспортного средства в сценарии замедления при повороте]
Фиг. 12 иллюстрирует характеристики целевой скорости транспортного средства в первом варианте осуществления в сценарии замедления при повороте, в котором, хотя ведущее транспортное средство ускоряется, появляется угол, где должно выполняться замедление. Операция для генерирования целевой скорости транспортного средства в сценарии замедления при повороте будет описана ниже со ссылкой на фиг. 12.
[0077] Здесь, хотя ведущее транспортное средство ускоряется, замедление из-за въезда в поворот начинается в момент времени t0, достигается минимальная скорость транспортного средства и выполняется переход от замедления к ускорению в момент времени t4 при повороте, и выезжают из поворота в момент времени t6. В этой ситуации, поскольку ведущее транспортное средство ускоряется, значения команды скорости транспортного средства, сгенерированные посредством первого блока 211 генерирования команды скорости транспортного средства (ACC), имеют характеристику значения команды скорости транспортного средства, которая согласуется с характеристикой целевой скорости транспортного средства для следования за ведущим транспортным средством, в которой скорость транспортного средства постепенно увеличивается из-за управления интервалом, который следует за ведущим транспортным средством до времени t0. Значения команды скорости транспортного средства, сгенерированные четвертым блоком 214 генерирования команды скорости (замедление при повороте), являются значениями команды большой скорости транспортного средства для движения вперед до момента времени t0. Эти значения команды скорости транспортного средства имеют характеристику значения команды скорости транспортного средства, которая следует характеристике целевой скорости транспортного средства при повороте, которая постепенно падает из-за замедления от времени t0 до времени t4 и в которой скорость транспортного средства увеличивается из-за ускорения от времени t4, где получается минимальная скорость транспортного средства, к моменту времени t6.
[0078] Когда характеристики целевой скорости транспортного средства (характеристики толстой сплошной линии) получены, выбирая самые низкие значения среди значений команд скорости транспортного средства, сгенерированных двумя блоками 211, 214 генерирования команд скорости транспортного средства, характеристика целевой скорости транспортного средства вплоть до момента времени t2 следует за характеристикой целевой скорости транспортного средства для следования за ведущим транспортным средством. Характеристика целевой скорости транспортного средства от времени t2 до времени t5 следует характеристике целевой скорости транспортного средства при повороте. После момента времени t5 характеристика целевой скорости транспортного средства для следования за ведущим транспортным средством, повторяется еще раз.
[0079] В отличие от этого, характеристики целевой скорости транспортного средства (характеристики толстой пунктирной линии) получены, выбирая самые низкие значения среди прогнозируемых значений команды скорости транспортного средства, которые поступают после истечения промежутка времени для прогнозирования (от времени t1 до времени t3 на фиг. 12) для каждого значения команды скорости транспортного средства, сгенерированного двумя блоками 211, 214 генерирования команды скорости транспортного средства. В этой ситуации при достижении времени t0 целевая скорость транспортного средства выбирается на основе наименьшего значения из прогнозируемых значений команды скорости транспортного средства, в результате чего практически не происходит изменений от фактической скорости транспортного средства для рассматриваемого транспортного средства в момент времени t0. После времени t0, поскольку целевая скорость транспортного средства в каждом интервале выборки Δt выбирается на основе наименьшего значения из прогнозируемых значений команды скорости транспортного средства в промежуток времени для прогнозирования, характеристика, связывающая целевые скорости транспортного средства, выбранные в каждом интервале выборки Δt плавно замедляется после плавного ускорения от времени t0 до времени t3. С момента времени t3 до момента времени t5 следует характеристика целевой скорости транспортного средства при повороте, а после времени t5 следует характеристика целевой скорости транспортного средства для следования за ведущим транспортным средством.
[0080] Таким образом, как ясно из сравнения характеристик целевой скорости транспортного средства (характеристики толстой сплошной линии и характеристики толстой пунктирной линии), заключенных в стрелку D на фиг. 12, характеристики целевой скорости транспортного средства (характеристики толстой пунктирной линии) в первом варианте осуществления являются характеристиками, в которых характеристики целевой скорости транспортного средства (характеристики толстой сплошной линии) в сравнительном варианте осуществления сдвигаются в сторону замедления. Следовательно, из-за генерирования целевых скоростей транспортного средства на основе прогнозируемых значений команды скорости транспортного средства, когда известно, что предстоит замедление, создание ненужного ускорения, такого как в сравнительном варианте осуществления, подавляется. Кроме того, поскольку характеристики целевой скорости транспортного средства в первом варианте осуществления имеют характеристику, которая плавно замедляется после плавного ускорения от времени t0 до времени t3, рывок при переключении с ускорения на замедление уменьшается до небольшой величины.
[0081] Таким образом, в ситуациях, когда хотя ведущее транспортное средство ускоряется, предстоит поворот, где должно выполняться замедление, подавляется ускорение рассматриваемого транспортного средства для следования за ведущим транспортным средством, которое ускоряется, и рассматриваемое транспортное средство начинает замедление в соответствии с поворотом. Как должно быть очевидно, это также применимо к ситуациям, в которых перед рассматриваемым транспортным средством имеется ограниченный угол, подверженный замедлению.
[0082] Далее будут описаны эффекты настоящего раскрытия. Эффекты, приведенные ниже в качестве примера, достигаются с помощью способа и устройства для генерирования целевой скорости транспортного средства для автономно управляемого транспортного средства согласно первому варианту осуществления.
[0083] (1) Способ генерирования целевой скорости транспортного средства для транспортного средства с содействием вождению (транспортное средство с автономным приводом), который генерирует целевую скорость транспортного средства для случая, когда транспортное средство должно двигаться/останавливаться, на основе множества значений команды скорости транспортного средства.
Прогнозируемое значение команды скорости транспортного средства, которое приходит после истечения заданного промежутка времени от текущего времени, вычисляется для каждого значения команды скорости транспортного средства из множества значений команды скорости транспортного средства (блок 22 вычисления прогнозируемой команды скорости транспортного средства). Наименьшее значение из множества рассчитанных прогнозируемых значений команды скорости транспортного средства выбирается в качестве целевой скорости транспортного средства (блок 23 согласования наименьшей команды скорости транспортного средства; фиг. 1). Соответственно, может быть предусмотрен способ генерирования целевой скорости транспортного средства для автономно управляемого транспортного средства, с помощью которого может быть подавлено ненужное ускорение, и, кроме того, рывок во время перехода от ускорения к замедлению уменьшается при движении с помощью содействия водителю (автономное вождение). Таким образом, возможно управление, в котором прогнозируются будущие значения целевых скоростей транспортного средства, и может быть исключено ненужное ускорение. Рывок при переключении с ускорения на замедление можно уменьшить. Кроме того, принимая самые низкие значения, план скорости транспортного средства на стороне безопасности может быть сформирован из множества значений команды скорости транспортного средства.
[0084] (2) При вычислении прогнозируемых значений команды скорости транспортного средства (блоки 22 вычисления прогнозируемой команды скорости транспортного средства), прогнозируемое значение команды скорости транспортного средства, которое поступает после истечения промежутка времени для прогнозирования, вычисляется на основе значения команды скорости транспортного средства в текущий момент времени, целевой степени ускорения и промежутка времени для прогнозирования (блок 22a вычисления прогнозируемой команды скорости транспортного средства).
Вычисляется необходимая степень ускорения, требуемая для достижения самого последнего прогнозируемого значения команды скорости транспортного средства от значения команды скорости транспортного средства, следующего за самым последним (блок 22b вычисления необходимой степени ускорения). Прогнозируемое значение команды скорости транспортного средства для текущего времени вычисляется из требуемой степени ускорения, периода вычисления и значения команды скорости транспортного средства, следующего за самым последним (блок 22c вычисления команды скорости транспортного средства; фиг. 7). Соответственно, в дополнение к эффекту (1), прогнозируемые значения команды скорости транспортного средства могут быть вычислены в реальном времени. Поскольку прогнозируемые значения команды скорости транспортного средства рассчитываются за период вычисления (интервал выборки), приложения также могут быть найдены в ситуациях, когда будущие целевые скорости транспортного средства неизвестны.
[0085] (3) При вычислении прогнозируемого значения команды скорости транспортного средства упреждения (блок 22a вычисления прогнозируемой команды скорости транспортного средства), когда промежуток времени для прогнозирования изменяется в соответствии с целевым поведением ускорения/замедления, в ситуациях, когда требуется управление с задержкой отклика, промежуток времени для прогнозирования устанавливается на более длительный промежуток времени, чем в ситуациях, когда требуется управление с усиленным откликом (фиг. 7). Соответственно, в дополнение к эффекту (2), в ситуациях, когда требуется управление с задержкой отклика, поведение ускорения/замедления может быть сделано более плавным, и промежуток времени, необходимый для переключения с ускорения на замедление, может быть сокращен.
[0086] (4) При вычислении прогнозируемого значения команды скорости транспортного средства (блок 22a вычисления прогнозируемой команды скорости транспортного средства) в ситуациях, когда прогнозируемое значение команды скорости транспортного средства является значением команды скорости транспортного средства, относящимся к пределу скорости транспортного средства, промежуток времени для прогнозирования устанавливается более длительным, чем для других значений команды скорости транспортного средства (фиг. 7). Соответственно, в дополнение к эффекту (2) или (3), скорость транспортного средства для рассматриваемого транспортного средства может быть выполнена так, чтобы плавно следовать пределу скорости транспортного средства.
[0087] (5) При вычислении прогнозируемого значения команды скорости транспортного средства упреждения (блок 22a вычисления прогнозируемой команды скорости транспортного средства), когда промежуток времени для прогнозирования изменяется в соответствии с целевым поведением ускорения/замедления, в ситуациях, когда требуется управление с усиленным откликом, промежуток времени для прогнозирования устанавливается на более короткий промежуток времени, чем в ситуациях, когда требуется управление с задержкой отклика (фиг. 7). Соответственно, в дополнение к эффектам (2)-(4), в ситуациях, когда требуется управление с усиленным откликом, поведение ускорения/замедления может быть выполнено быстрее, промежуток времени для перехода от ускорения к замедлению может быть увеличено, и количество сегментов ускорения может быть увеличено.
[0088] (6) При вычислении прогнозируемого значения команды скорости транспортного средства (блок 22a вычисления прогнозируемой команды скорости транспортного средства), в ситуациях, когда прогнозируемое значение команды скорости транспортного средства является значением команды скорости транспортного средства, относящимся к следованию за ведущим транспортным средством, промежуток времени для прогнозирования установлен более коротким, чем для других значений команды скорости транспортного средства (фиг. 7). Соответственно, помимо эффектов (2)-(5), рассматриваемое транспортное средство может быть выполнено так, чтобы быстро следовать за ведущим транспортным средством.
[0089] (7) При вычислении прогнозируемых значений команды скорости транспортного средства (блок 22 вычисления прогнозируемой команды скорости транспортного средства) в ситуациях, когда необходимая степень ускорения превысила предварительно установленную максимальную степень ускорения, вместо выбора самого последнего значения прогнозируемой команды скорости транспортного средства, выбирается значение команды скорости транспортного средства, следующее за самым последним (блок 22е подавления/предотвращения ускорения; фиг. 7). Соответственно, помимо эффектов (2)-(6), можно избежать подавления ускорения в сценарии, в котором ускорение фактически является желательным.
[0090] (8) При вычислении прогнозируемых значений команды скорости транспортного средства (блок 22 вычисления прогнозируемой команды скорости транспортного средства), когда прогнозируемое значение команды скорости транспортного средства для текущего времени превышает диапазон скоростей транспортного средства, из которого может обрабатываться целевая скорость транспортного средства, прогнозируемое значение команды скорости транспортного средства для текущего времени ограничивается диапазоном скоростей транспортного средства, из которого может обрабатываться целевая скорость транспортного средства (блок 22d ограничителя скорости транспортного средства; фиг. 7). Соответственно, помимо эффектов (2)-(7), можно предотвратить принятие целевой скоростью транспортного средства отрицательного значения и предотвратить возникновение любой ненужной степени замедления.
[0091] (9) При выборе наименьшего значения из множества прогнозируемых значений команды скорости транспортного средства и генерировании целевой скорости транспортного средства предел степени ускорения/замедления, который соответствует типу выбранной прогнозируемой скорости транспортного средства, выбирается в то же время (блок 23 согласования наименьшей команды скорости транспортного средства; фиг. 1). Соответственно, помимо эффектов (1)-(8), из-за применения предела степени ускорения/замедления в соответствии с типом выбранной целевой скорости транспортного средства, индивидуальное поведение ускорения/замедления, соответствующее типу целевой скорости транспортного средства, стало возможным. Например, когда выбирается целевая скорость транспортного средства, установленная с использованием предела скорости транспортного средства, становится возможным плавное следование за счет уменьшения степени ускорения/замедления. В качестве альтернативы, когда выбирается целевая скорость транспортного средства, установленная с использованием ACC, становится возможным следование в ответ на изменения в положении ведущего транспортного средства за счет увеличения степени ускорения/замедления.
[0092] (10) При генерировании значений команд скорости транспортного средства (первый блок 211 генерирования команды скорости транспортного средства) получают расстояние интервала и относительную скорость транспортного средства для ведущего транспортного средства (блок 211b определения расстояния интервала и относительной скорости транспортного средства), и значение команды скорости транспортного средства, требуемое для того, чтобы рассматриваемое транспортное средство следовало за ведущим транспортным средством, вычисляется в соответствии с полученным расстоянием интервала и относительной скоростью транспортного средства (блок 211c вычисления команды скорости транспортного средства; фиг. 2). Соответственно, помимо эффектов (1)-(9), в ситуациях, когда транспортное средство останавливается перед рассматриваемым транспортным средством, или в ситуациях, когда транспортное средство с низкой скоростью транспортного средства присутствует перед рассматриваемым транспортным средством, возникновение ненужного ускорения до таких ситуаций (например, ускорение для соблюдения предела скорости транспортного средства) может быть подавлено.
[0093] (11) При генерировании значений команды скорости транспортного средства (третий блок 213 генерирования команды скорости транспортного средства) получают информацию о пределе скорости транспортного средства для дороги (блок 213a получения предела скорости транспортного средства) и значение команды скорости транспортного средства, требуемое для следования полученному пределу скорости транспортного средства вычисляется (блок 213b вычисления команды скорости транспортного средства); фиг. 5). Соответственно, помимо эффектов (1)-(10), в ситуациях, когда известно, что ограничение скорости транспортного средства будет падать впереди рассматриваемого транспортного средства, необязательное ускорение, возникающее до таких ситуаций, может быть подавлено.
[0094] (12) При генерировании значений команд скорости транспортного средства (второй блок 212 генерирования команды скорости транспортного средства) получают расстояние от рассматриваемого транспортного средства до линии остановки (блок 212a получения относительного расстояния до линии остановки), и вычисляется значение команды скорости транспортного средства, необходимое для замедления и остановки в пределах полученного относительного расстояния до линии остановки (блок 212b вычисления команды скорости транспортного средства; фиг. 3). Соответственно, в дополнение к эффектам (1)-(11), в ситуациях, когда известно, что произойдет замедление и остановка (например, когда есть линия остановки перед рассматриваемым транспортным средством, когда сигнал светофора впереди рассматриваемого транспортного средства имеет красный цвет и т.д.), необязательное ускорение, возникающее до таких ситуаций, может быть подавлено.
[0095] (13) При генерировании значений команды скорости транспортного средства (четвертый блок 214 генерирования команды скорости транспортного средства) получают кривизну дороги, по которой осуществляется движение (блок 214а получения информации о кривизне дороги), и значение команды скорости транспортного средства, не превышающее максимальную поперечную степень ускорения, которая устанавливается заранее, вычисляется в соответствии с полученной информацией о кривизне дороги (блок 214b вычисления команды скорости транспортного средства; фиг. 6). Соответственно, в дополнение к эффектам (1)-(12), в ситуациях, когда перед рассматриваемым транспортным средством имеется крутой угол и известно, что замедление будет выполнено заранее, ненужное ускорение, возникающее до таких ситуаций, может быть подавлено.
(14) Устройство для генерирования целевой скорости транспортного средства для транспортного средства с содействием вождению (транспортное средство с автономным приводом), оснащенного контроллером (блоком 2 автономного управления вождением), который включает в себя множество блоков 21 генерирования команд скорости транспортного средства и генерирует целевую скорость транспортного средства для случая, когда транспортное средство должно двигаться/останавливаться, при этом контроллер (блок 2 автономного управления движением) содержит блок 22 вычисления прогнозируемой команды скорости транспортного средства и блок 23 согласования наименьшей команды скорости транспортного средства. Блок 22 вычисления прогнозируемой команды скорости транспортного средства рассчитывает прогнозируемое значение команды скорости транспортного средства, которое поступает после истечения заданного промежутка времени от текущего времени, для каждого значения команды скорости транспортного средства, сгенерированного множеством блоков 21 генерирования команд скорости транспортного средства. Блок 23 согласования наименьшей команды скорости транспортного средства выбирает наименьшее значение из множества прогнозируемых значений команды скорости транспортного средства, рассчитанных блоком вычисления прогнозируемой команды скорости транспортного средства, в качестве целевой скорости транспортного средства (фиг. 1). Соответственно, может быть предусмотрено устройство для генерирования целевой скорости транспортного средства для автономно управляемого транспортного средства, с помощью которого можно подавлять ненужное ускорение, и, кроме того, рывок во время перехода от ускорения к замедлению уменьшается при движении с помощью содействия водителю (автономное вождение).
[0097] Выше было описано устройство для генерирования целевой скорости транспортного средства для транспортного средства с содействием вождению настоящего раскрытия со ссылкой на первый вариант осуществления. Однако его конкретная конфигурация не ограничена таковой в первом варианте осуществления, и модификации, дополнения и т.д. для конструкции возможны без отклонения от сущности изобретения, изложенной в прилагаемой формуле изобретения.
[0098] В первом варианте осуществления был представлен пример, в котором в качестве блоков 21 генерирования команд скорости транспортного средства и блоков 22 вычисления прогнозируемых команд скорости транспортного средства используются четыре типа блоков генерирования команд скорости транспортного средства и блоков вычисления прогнозируемых команд скорости транспортного средства, соответствующие ACC, линии остановки, пределу скорости транспортного средства и замедлению на повороте. Однако пример может быть таким, в котором в качестве блоков генерирования команд скорости транспортного средства и блоков вычисления прогнозируемых команд скорости транспортного средства два или более типов блоков генерирования команд скорости автомобиля и блоков вычисления прогнозируемых команд скорости транспортного средства. Это охватывает примеры, в которых предусмотрены два, три или пять или более типов блоков генерирования команд скорости транспортного средства и блоков вычисления прогнозируемых команд скорости транспортного средства.
[0099] В первом варианте осуществления был представлен пример, в котором способ и устройство для генерирования целевой скорости транспортного средства согласно настоящему раскрытию применяются к транспортному средству с автономным приводом, в котором рулевое управление/движение/торможение автоматически управляются в соответствии с выбором режима автономного вождения. Однако способ и устройство для генерирования целевой скорости транспортного средства настоящего раскрытия могут применяться к любому транспортному средству, которое содействует вождению водителя с использованием целевой скорости транспортного средства, например к транспортному средству с содействием вождению, которое содействует вождению водителя посредством отображение целевой скорости транспортного средства, или транспортному средству с содействием вождению, оснащенному только ACC.
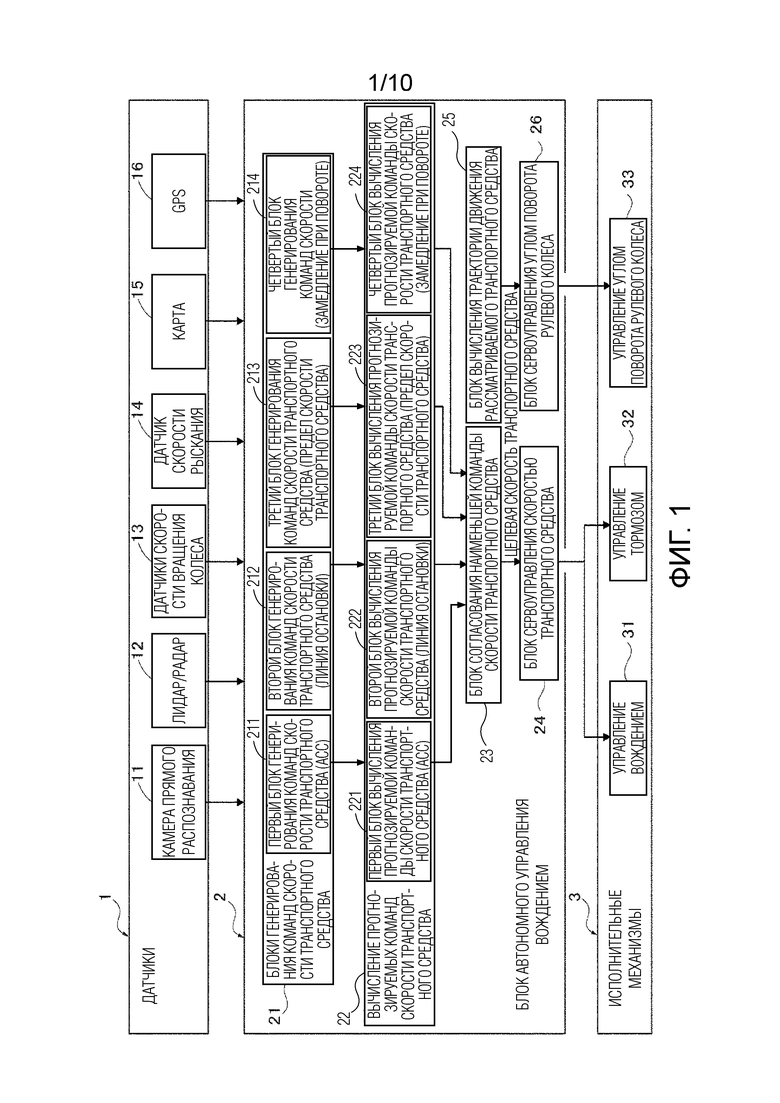
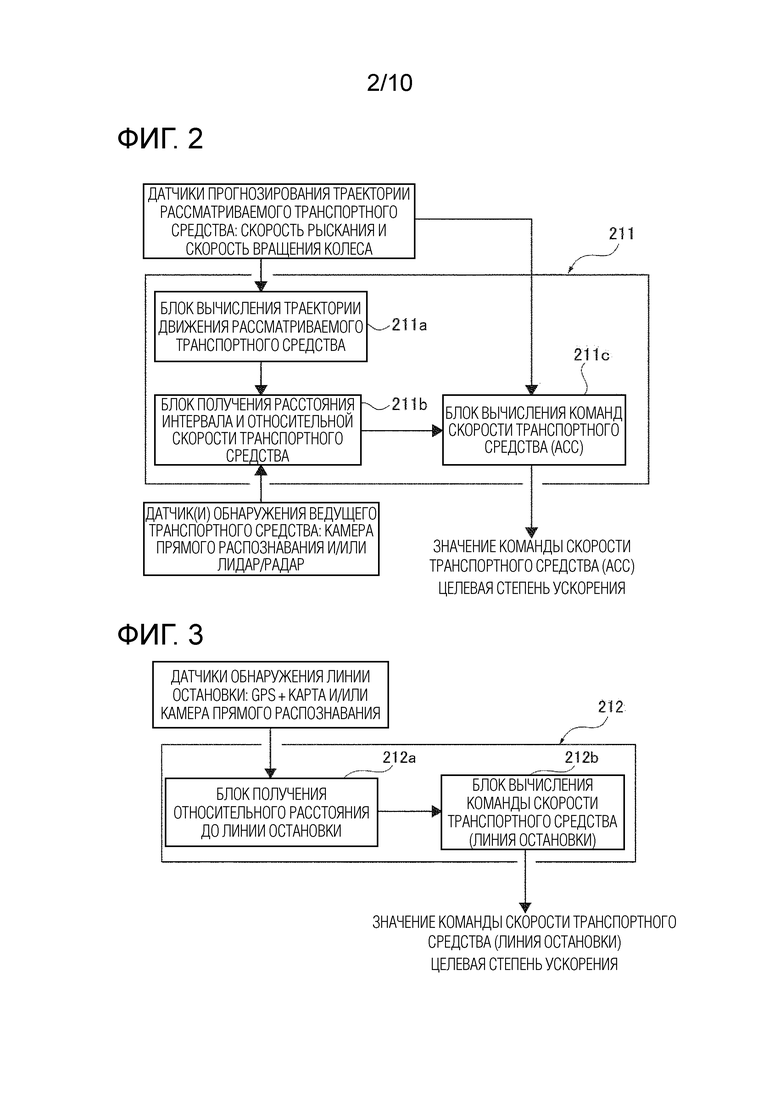
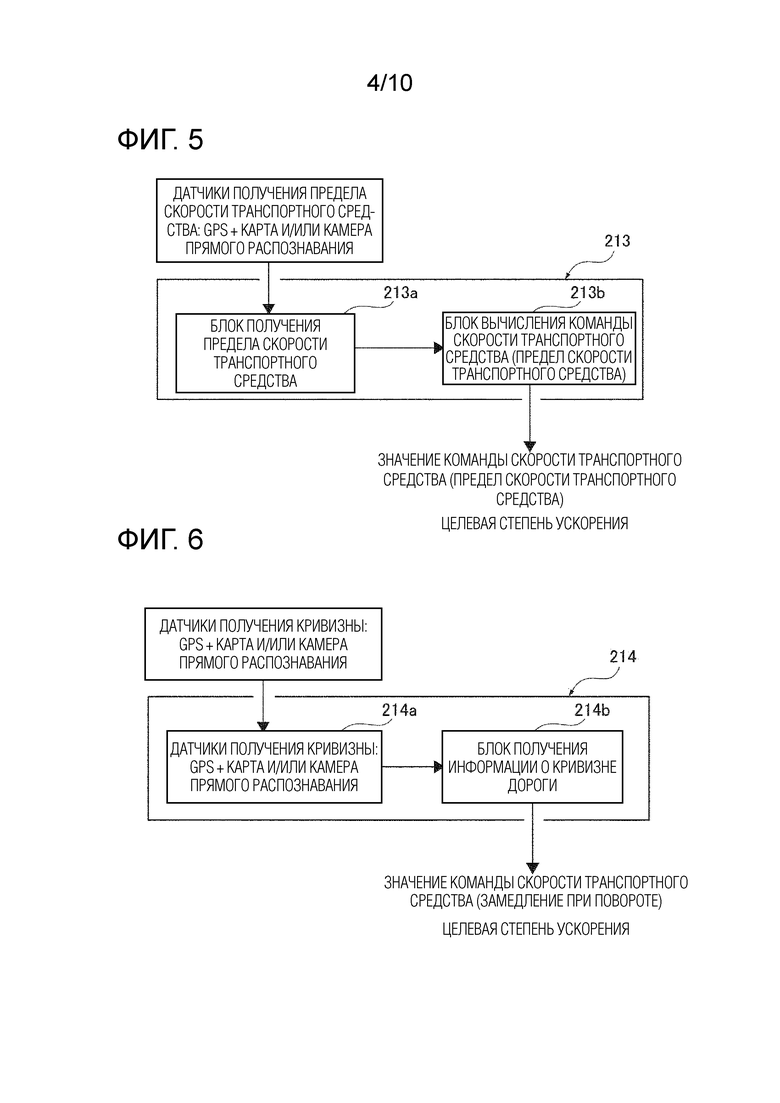
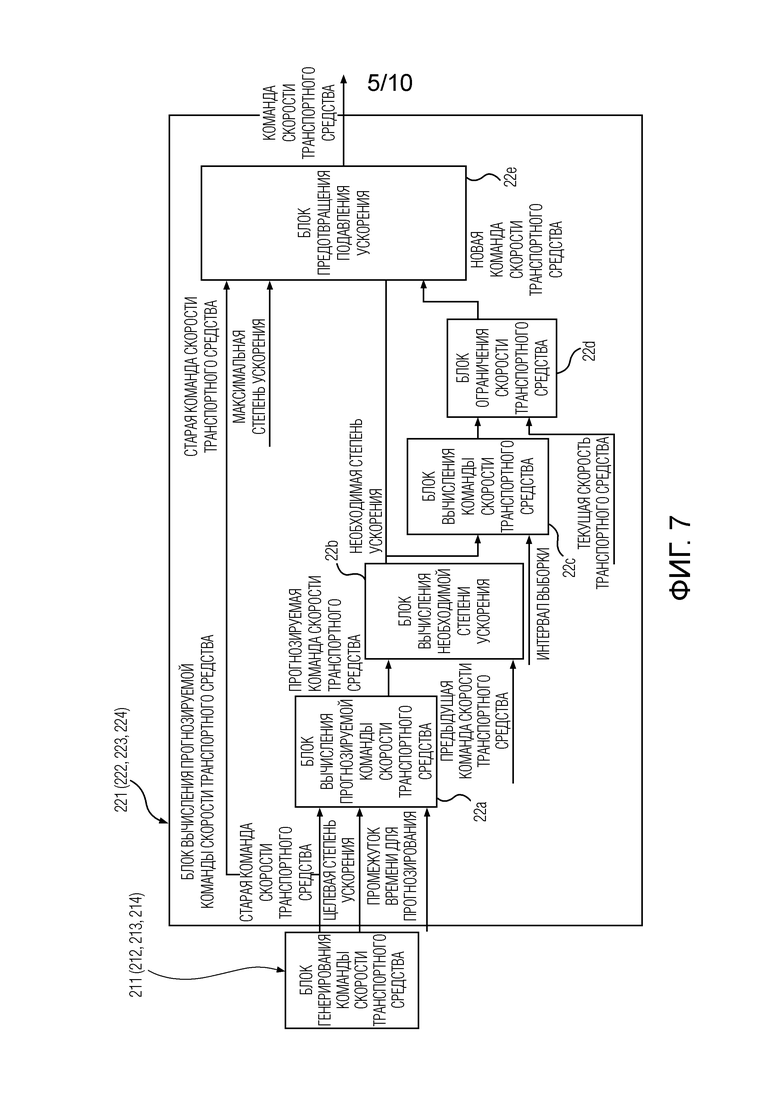
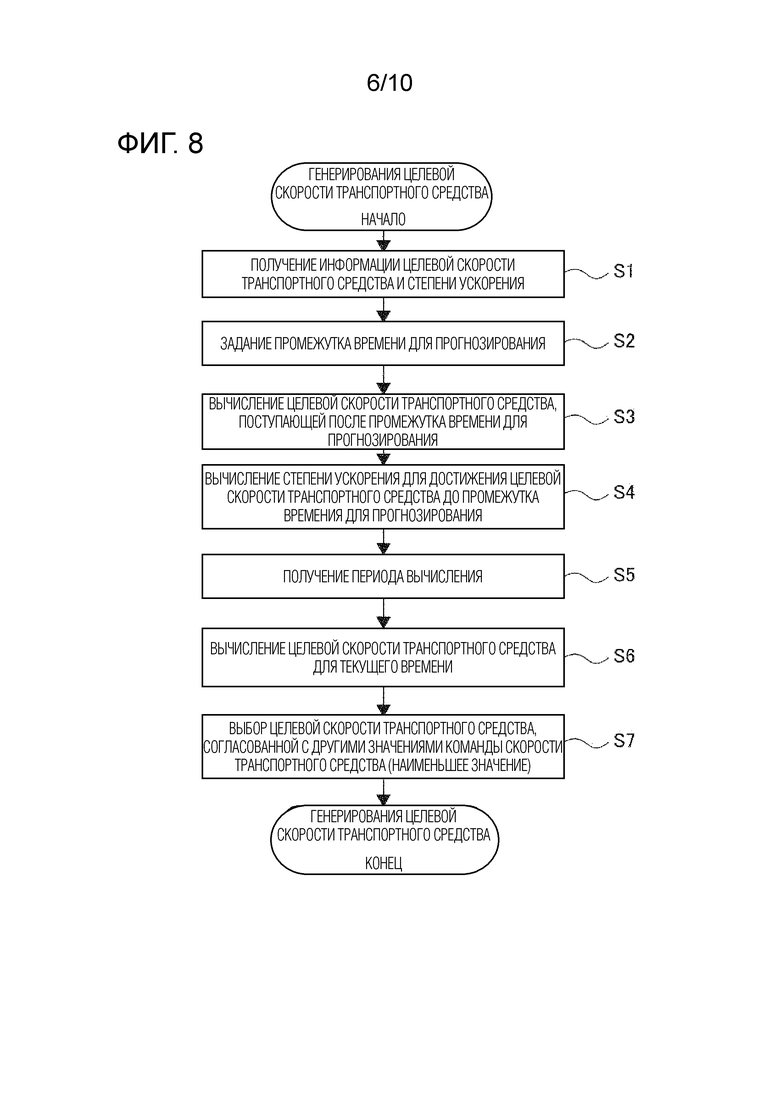
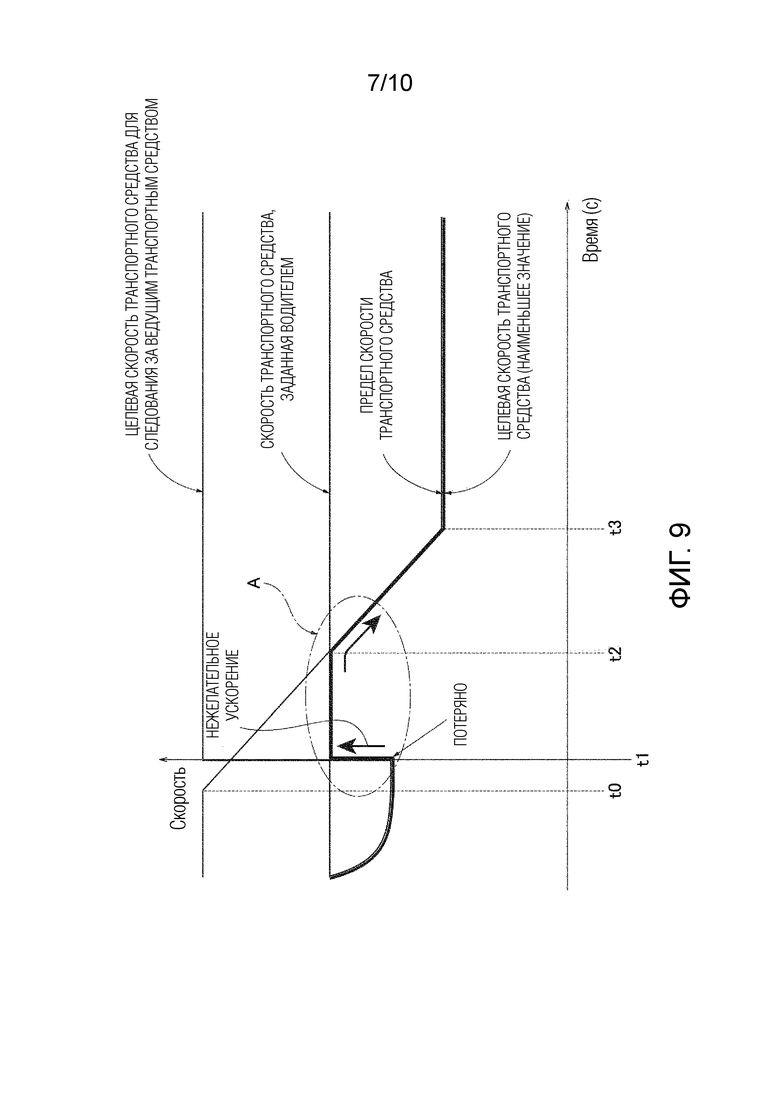
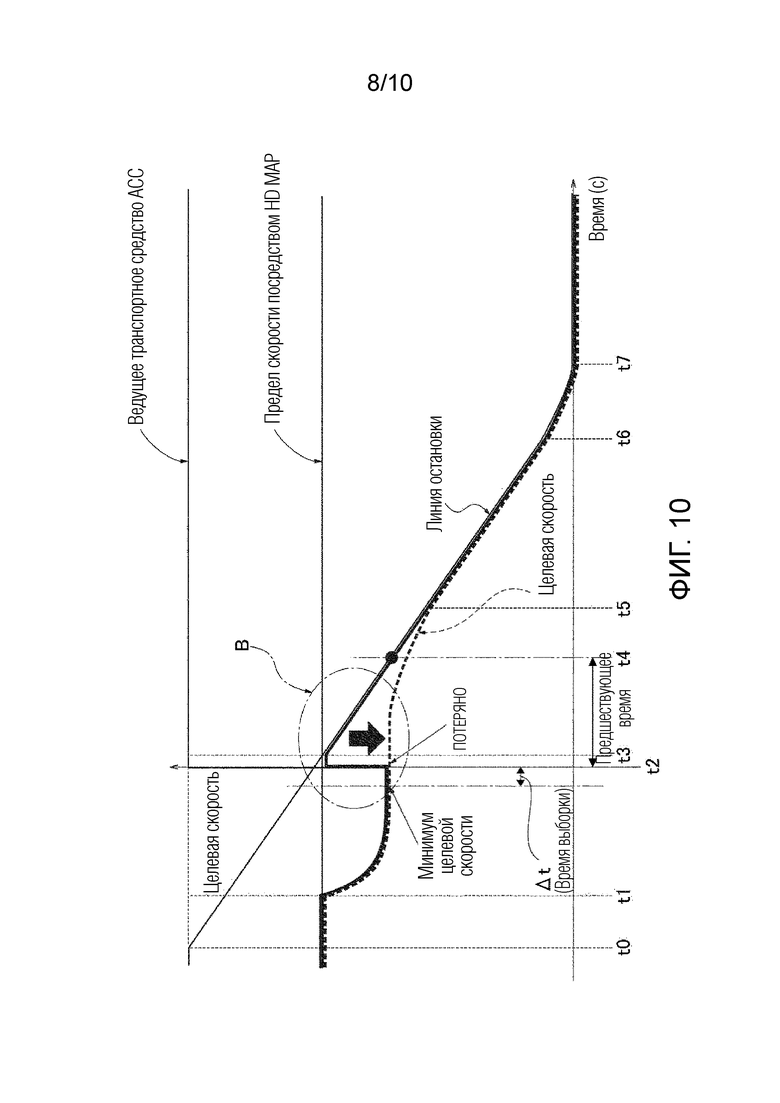
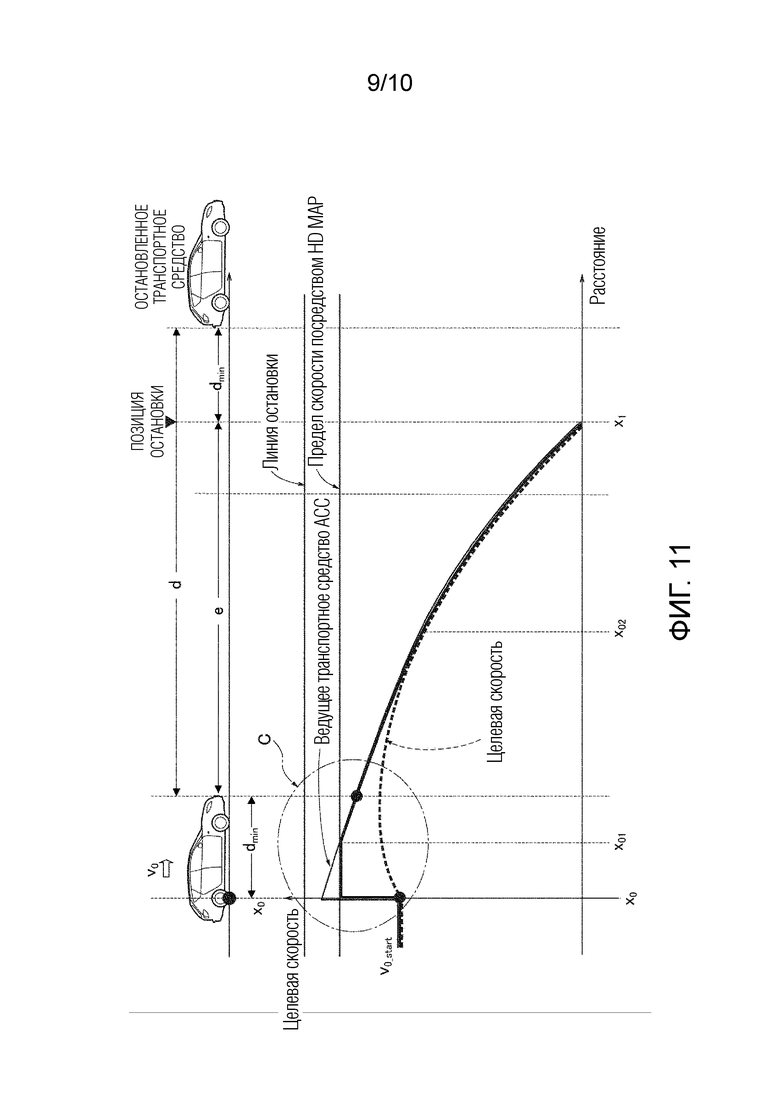
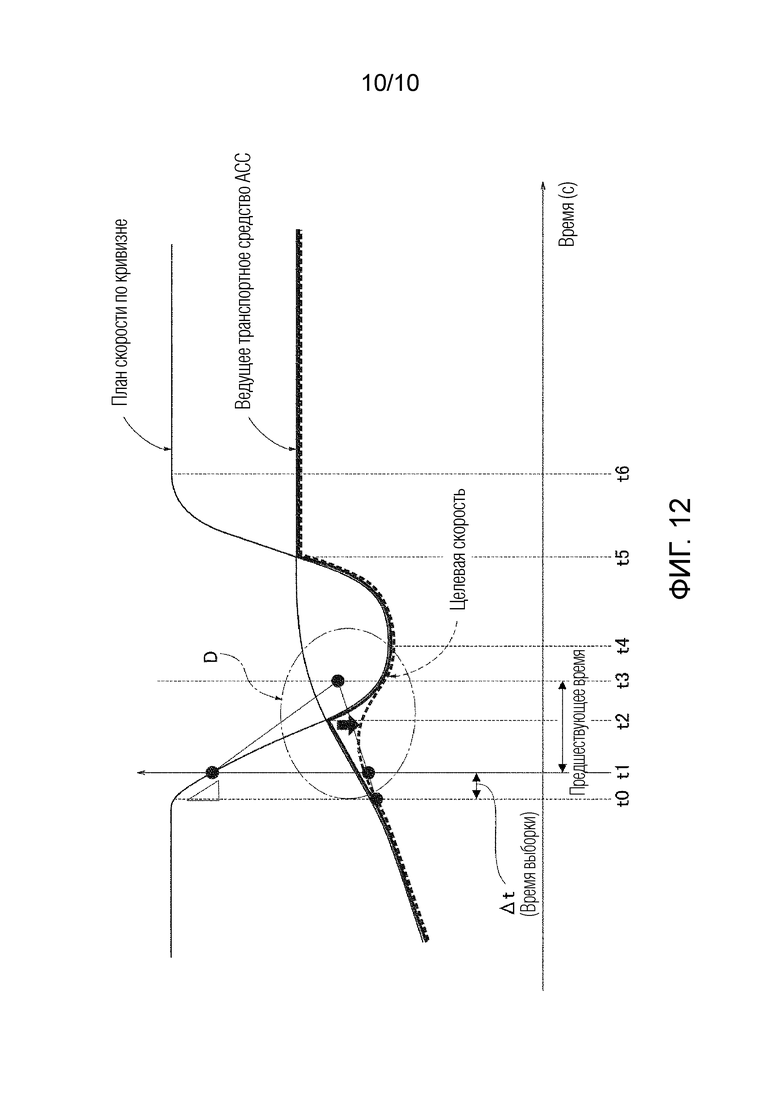
Изобретение относится к транспортным средствам. В способе генерирования целевой скорости транспортного средства для транспортного средства с содействием вождению вычисляют прогнозируемое значение команды скорости транспортного средства, которое поступает после истечения заданного промежутка времени от текущего времени, для каждого значения команды скорости из множества значений команд скорости, включая значение команды скорости для следования за ведущим транспортным средством и значение команды скорости на основе картографической информации. Затем выбирают наименьшее значение из множества вычисленных прогнозируемых значений команды скорости транспортного средства в качестве целевой скорости. Уменьшается рывок при движении. 2 н. и 12 з.п. ф-лы, 12 ил.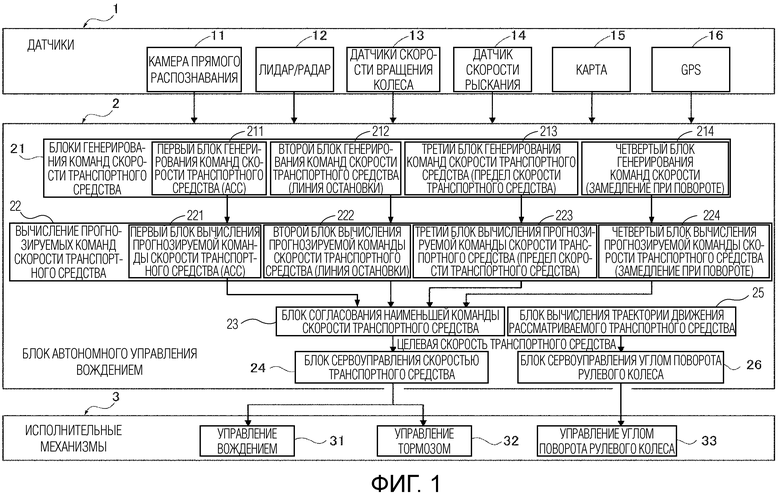
1. Способ генерирования целевой скорости транспортного средства для транспортного средства с содействием вождению, в котором целевая скорость транспортного средства для случая, когда транспортное средство должно двигаться/останавливаться, генерируется на основе множества значений команды скорости транспортного средства, включая по меньшей мере значение команды скорости транспортного средства для следования за ведущим транспортным средством, представляющее собой значение команды скорости транспортного средства, которое соответствует позиции за пределами текущей позиции, заданное для выполнения управления интервалом, чтобы поддерживать расстояние интервала, которое соответствует скорости транспортного средства, для которой скорость транспортного средства, заданная водителем, служит в качестве максимальной скорости транспортного средства, и значение команды скорости транспортного средства на основе картографической информации, представляющее собой значение команды скорости транспортного средства, которое соответствует позиции за пределами текущей позиции, заданное на основании картографической информации, при этом способ отличается тем, что содержит этапы, на которых:
вычисляют прогнозируемое значение команды скорости транспортного средства, которое поступает после истечения заданного промежутка времени от текущего времени, для каждого значения команды скорости транспортного средства из множества значений команд скорости транспортного средства, включая значение команды скорости транспортного средства для следования за ведущим транспортным средством и значение команды скорости транспортного средства на основе картографической информации; и
выбирают наименьшее значение из множества вычисленных прогнозируемых значений команды скорости транспортного средства в качестве целевой скорости транспортного средства.
2. Способ генерирования целевой скорости транспортного средства для транспортного средства с содействием вождению по п. 1, отличающийся тем, что:
при вычислении прогнозируемых значений команды скорости транспортного средства прогнозируемое значение команды скорости транспортного средства, которое поступает после истечения промежутка времени для прогнозирования, вычисляется на основе значения команды скорости транспортного средства в настоящий момент времени, целевой степени ускорения и промежутка времени для прогнозирования;
вычисляется необходимая степень ускорения, требуемая для достижения прогнозируемого значения команды скорости транспортного средства, которое поступает после истечения самого последнего промежутка времени для прогнозирования, из значения команды скорости транспортного средства, следующего за самым последним; и
прогнозируемое значение команды скорости транспортного средства, которое поступает после периода вычисления, вычисляется из необходимой степени ускорения, периода вычисления и значения команды скорости транспортного средства, следующего за самым последним.
3. Способ генерирования целевой скорости транспортного средства для транспортного средства с содействием вождению по п. 2, отличающийся тем, что:
при вычислении прогнозируемого значения команды скорости транспортного средства, когда промежуток времени для прогнозирования изменяется в соответствии с целевым поведением ускорения/замедления, в ситуациях, когда требуется управление с задержкой отклика, промежуток времени для прогнозирования устанавливается на более длительный промежуток времени, чем в ситуациях, когда требуется управление с усиленным откликом.
4. Способ генерирования целевой скорости транспортного средства для транспортного средства с содействием вождению по п. 2 или 3, отличающийся тем, что:
при вычислении прогнозируемого значения команды скорости транспортного средства в ситуациях, когда прогнозируемое значение команды скорости транспортного средства является значением команды скорости транспортного средства, относящимся к пределу скорости транспортного средства, промежуток времени для прогнозирования устанавливается более длительным, чем для других значений команды скорости транспортного средства.
5. Способ генерирования целевой скорости транспортного средства для транспортного средства с содействием вождению по любому из пп. 2-4, отличающийся тем, что:
при вычислении прогнозируемого значения команды скорости транспортного средства, когда промежуток времени для прогнозирования изменяется в соответствии с целевым поведением ускорения/замедления, в ситуациях, когда требуется управление с усиленным откликом, промежуток времени для прогнозирования устанавливается в более короткий промежуток времени, чем в ситуациях, когда требуется управление с задержкой ответа.
6. Способ генерирования целевой скорости транспортного средства для транспортного средства с содействием вождению по любому из пп. 2-5, отличающийся тем, что:
при вычислении прогнозируемого значения команды скорости транспортного средства, в ситуациях, когда прогнозируемое значение команды скорости транспортного средства является значением команды скорости транспортного средства, относящимся к следованию за ведущим транспортным средством, промежуток времени для прогнозирования устанавливается более коротким, чем для других значений команды скорости транспортного средства.
7. Способ генерирования целевой скорости транспортного средства для транспортного средства с содействием вождению по любому из пп. 2-6, отличающийся тем, что:
при вычислении прогнозируемых значений команды скорости транспортного средства в ситуациях, когда необходимая степень ускорения превысила предварительно установленную максимальную степень ускорения, вместо выбора самого последнего прогнозируемого значения команды скорости транспортного средства выбирают прогнозируемое значение команды скорости транспортного средства, следующее за самым последним.
8. Способ генерирования целевой скорости транспортного средства для транспортного средства с содействием вождению по любому из пп. 2-7, отличающийся тем, что:
при вычислении прогнозируемых значений команды скорости транспортного средства, когда прогнозируемое значение команды скорости транспортного средства в текущее время превышает диапазон скоростей транспортного средства, из которого может обрабатываться целевая скорость транспортного средства, прогнозируемое значение команды скорости транспортного средства для текущего времени ограничено диапазоном скоростей транспортного средства, из которого может обрабатываться целевая скорость транспортного средства.
9. Способ генерирования целевой скорости транспортного средства для транспортного средства с содействием вождению по любому из пп. 1-8, отличающийся тем, что:
при выборе наименьшего значения из множества прогнозируемых значений команды скорости транспортного средства и генерировании целевой скорости транспортного средства одновременно выбирается предел степени ускорения/замедления, который соответствует типу выбранной прогнозируемой скорости транспортного средства.
10. Способ генерирования целевой скорости транспортного средства для транспортного средства с содействием вождению по любому из пп. 1-9, отличающийся тем, что:
при генерировании значений команды скорости транспортного средства получают расстояние интервала до ведущего транспортного средства и относительную скорость транспортного средства для ведущего транспортного средства, и значение команды скорости транспортного средства, требуемое для рассматриваемого транспортного средства, чтобы следовать за ведущим транспортным средством, вычисляют в соответствии с полученным расстоянием интервала и полученной относительной скоростью транспортного средства.
11. Способ генерирования целевой скорости транспортного средства для транспортного средства с содействием вождению по любому из пп. 1-10, отличающийся тем, что:
при генерировании значений команды скорости транспортного средства получают информацию о пределе скорости транспортного средства для дороги и вычисляют значение команды скорости транспортного средства, необходимое для соблюдения полученного предела скорости транспортного средства.
12. Способ генерирования целевой скорости транспортного средства для транспортного средства с содействием вождению по любому из пп. 1-11, отличающийся тем, что:
при генерировании значений команды скорости транспортного средства получают расстояние от рассматриваемого транспортного средства до линии остановки и вычисляют значение команды скорости транспортного средства, необходимое для замедления и остановки в пределах полученного относительного расстояния до линии остановки.
13. Способ генерирования целевой скорости транспортного средства для транспортного средства с содействием вождению по любому из пп. 1-12, отличающийся тем, что:
при генерировании значений команды скорости транспортного средства получают кривизну дороги, по которой осуществляется движение, и значение команды скорости транспортного средства, не превышающее максимальную боковую степень ускорения, установленную заранее, вычисляется в соответствии с полученной информацией о кривизне дороги.
14. Устройство генерирования целевой скорости транспортного средства для генерирования целевой скорости транспортного средства для транспортного средства с содействием вождению, причем устройство генерирования целевой скорости транспортного средства содержит: контроллер, который включает в себя множество блоков генерирования команд скорости транспортного средства, включая по меньшей мере значение команды скорости транспортного средства для следования за ведущим транспортным средством, представляющее собой значение команды скорости транспортного средства, которое соответствует позиции за пределами текущей позиции, заданное для выполнения управления интервалом, чтобы поддерживать расстояние интервала, которое соответствует скорости транспортного средства, для которой скорость транспортного средства, заданная водителем, служит в качестве максимальной скорости транспортного средства, и значение команды скорости транспортного средства на основе картографической информации, представляющее собой значение команды скорости транспортного средства, которое соответствует позиции за пределами текущей позиции, заданное на основании картографической информации, и в котором генерируется целевая скорость транспортного средства для случая, когда транспортное средство должно двигаться/останавливаться, причем устройство отличается тем, что контроллер содержит:
блок вычисления прогнозируемой команды скорости транспортного средства, который вычисляет прогнозируемое значение команды скорости транспортного средства, которое поступает после истечения заданного промежутка времени от текущего времени для каждого из значений команды скорости транспортного средства, сгенерированных множеством блоков генерирования команды скорости транспортного средства, включая значение команды скорости транспортного средства для следования за ведущим транспортным средством и значение команды скорости транспортного средства на основе картографической информации; и
блок согласования наименьшей команды скорости транспортного средства, который выбирает наименьшее значение из множества прогнозируемых значений команды скорости транспортного средства, вычисленных блоком генерирования прогнозируемой команды скорости транспортного средства, в качестве целевой скорости транспортного средства.
| JP 2005028995 A, 03.02.2005 | |||
| JP 2015129701 А, 16.07.2015 | |||
| JP 2015095907 А, 18.05.2015 | |||
| JP 2017081426 А, 18.05.2017. |

