Область техники, к которой относится изобретение
Настоящее изобретение относится к устройству формирования целевой скорости транспортного средства и к устройству управления движением. Более конкретно, настоящее изобретение относится к устройству формирования целевой скорости транспортного средства, которое формирует целевую скорость транспортного средства для управления движением транспортного средства, и к устройству управления движением, которое управляет автономным движением транспортного средства.
Уровень техники
Делаются попытки разработать устройство автономного управления движением, которое способно автономно управлять транспортным средством от пункта отправления до пункта назначения (например, ссылка на патентный документ 1). В этом типе устройства автономного управления движением, например, курс (маршрут) транспортного средства от пункта отправления до пункта назначения вычисляется с помощью хорошо известной навигационной технологии, и полосы движения и препятствия по курсу обнаруживаются с помощью технологии обнаружения, такой как радиолокационный датчик, датчик изображения и т.д. Устройство автономного управления движением инструктирует транспортному средству двигаться автономно по курсу на основе обнаруженной информации.
Документы предшествующего уровня техники
Патентные документы
[Патентный документ 1] Выложенная японская патентная заявка № 2011-240816
Сущность изобретения
Задача изобретения
В таком автономном управлении движением, если инструкция остановки или инструкция замедления выводится, в то время как транспортное средство ускоряется, что вызывает внезапное переключение на замедление, поведение транспортного средства внезапно значительно изменяется, и существует вероятность, что пользователь почувствует дискомфорт в ходовых качествах. Дополнительно, существует вероятность того, что пользователь также почувствует дискомфорт, когда выводится инструкция ускорения, в то время как транспортное средство замедляется, что вызывает внезапное переключение на ускорение.
Задачей настоящего изобретения является предоставление устройства управления движением, которое уменьшает дискомфорт, который чувствуется пользователем при управлении транспортным средством во время такого автономного движения.
Средство решения задачи
Устройство формирования целевой скорости транспортного средства для транспортного средства в качестве одного варианта осуществления настоящего изобретения содержит блок определения и блок корректировки. Блок определения определяет, присутствует или нет точка внезапного изменения, в которой ускорение изменяется сверх предварительно определенного условия, в целевой скорости транспортного средства, содержащейся в информации о целевом маршруте транспортного средства, которая задается заранее. Блок корректировки корректирует целевую скорость транспортного средства так, чтобы устранять точку внезапного изменения, если определяется, что точка внезапного изменения присутствует, посредством блока определения.
Устройство управления движением, в качестве другого варианта осуществления настоящего изобретения, является устройством управления движением транспортного средства, которое имеет блок измерения расстояния, который измеряет расстояние до объекта, который должен быть измерен, содержащий блок определения ускорения и блок настройки расстояния обнаружения. Блок определения ускорения определяет, больше или нет ускорение транспортного средства, чем предварительно определенное пороговое значение ускорения. Блок настройки расстояния обнаружения увеличивает расстояние обнаружения для блока измерения расстояния, если определяется, что ускорение транспортного средства больше предварительно определенного порогового значения ускорения, посредством блока определения ускорения.
Преимущества изобретения
Согласно настоящему изобретению, становится возможным предоставлять устройство формирования целевой скорости и устройство управления движением, которое уменьшает дискомфорт, который ощущается пользователем при управлении автономным движением транспортного средства.
Краткое описание чертежей
Фиг. 1 - это блок-схема, иллюстрирующая устройство управления движением согласно первому варианту осуществления.
Фиг. 2 - это блок-схема, иллюстрирующая ECU формирования целевого маршрута устройства управления движением.
Фиг. 3 - это схематичный вид, описывающий обновление целевого маршрута.
Фиг. 4 - это блок-схема последовательности операций, описывающая корректировку целевой скорости транспортного средства согласно первому варианту осуществления.
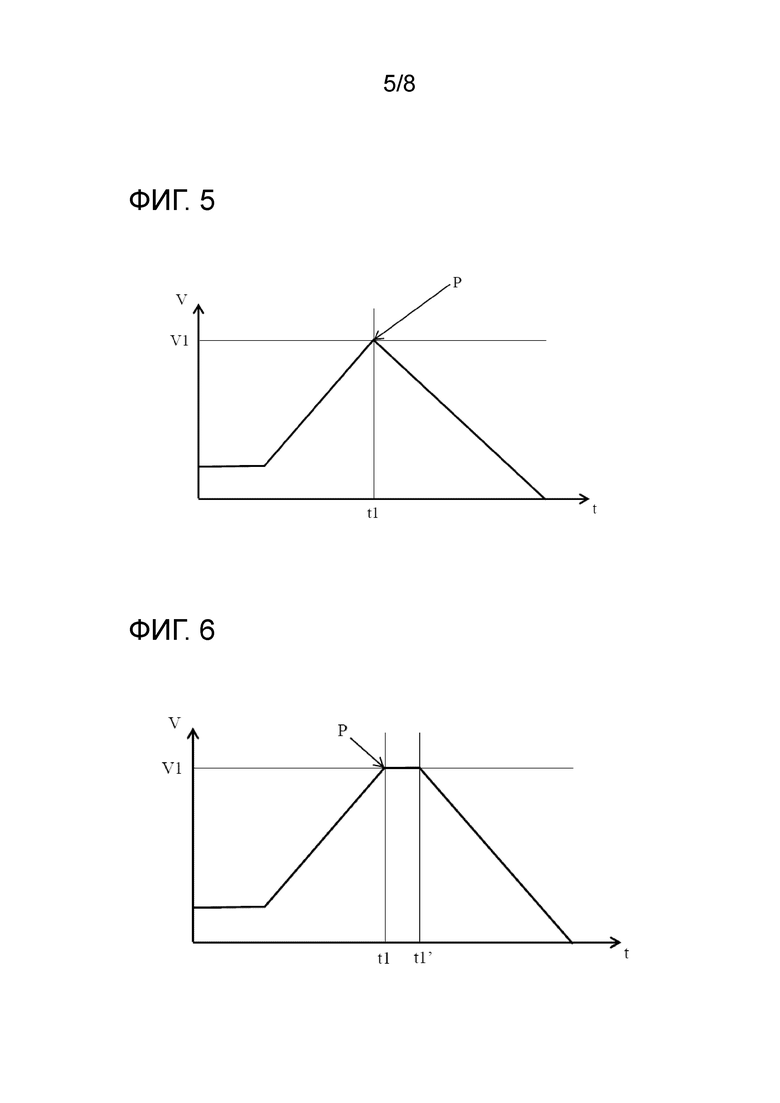
Фиг. 5 - это график, описывающий целевую скорость транспортного средства перед корректировкой согласно первому варианту осуществления.
Фиг. 6 - это график, описывающий формирование целевой скорости транспортного средства после корректировки согласно первому варианту осуществления.
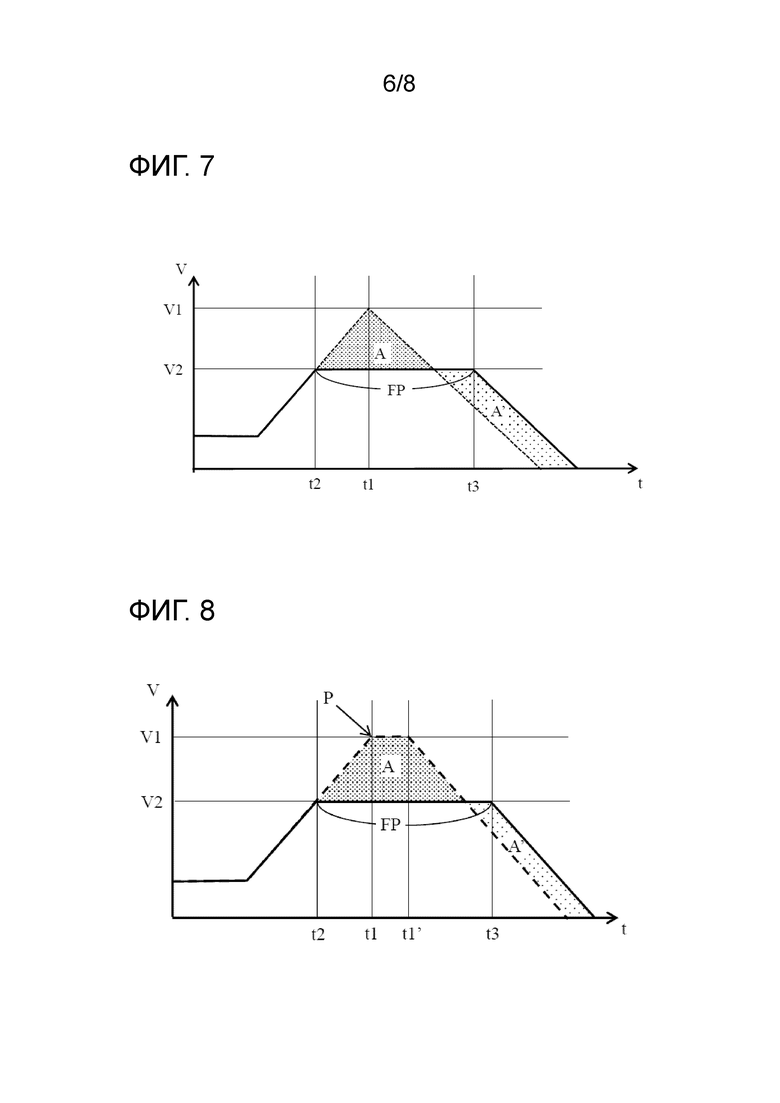
Фиг. 7 - это график, описывающий целевую скорость транспортного средства перед корректировкой согласно первому варианту осуществления.
Фиг. 8 - это график, описывающий формирование целевой скорости транспортного средства после корректировки согласно первому варианту осуществления.
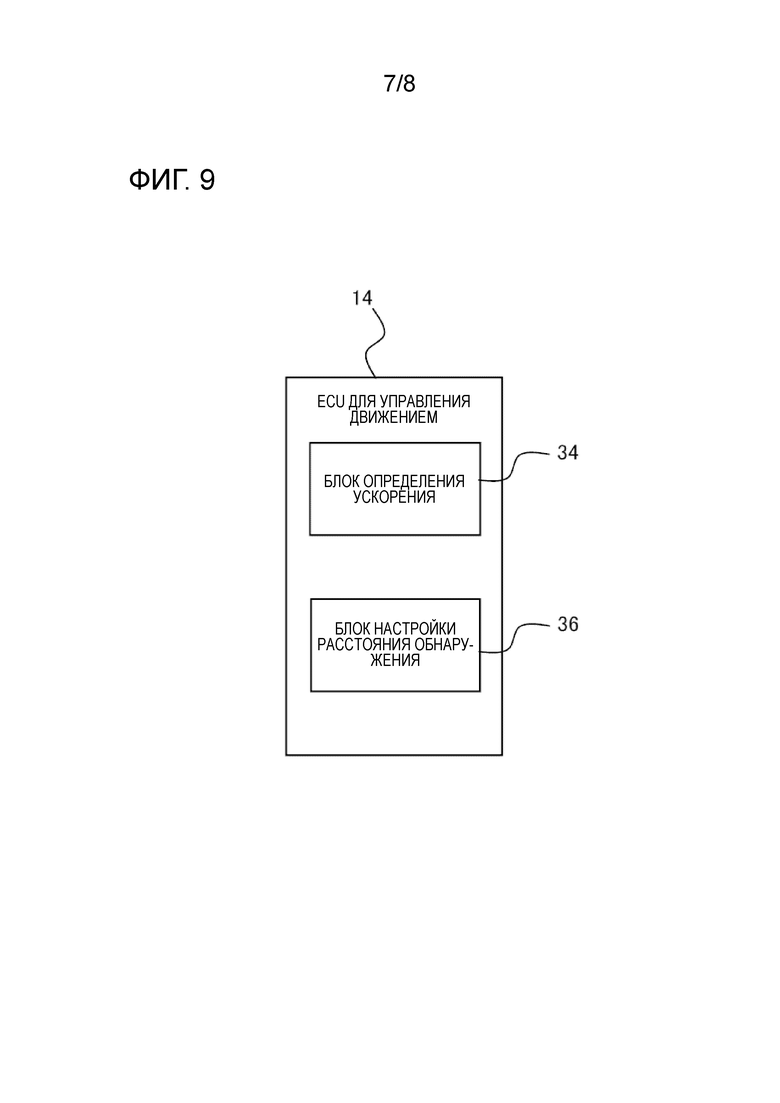
Фиг. 9 - это блок-схема, иллюстрирующая ECU управления движением согласно второму варианту осуществления.
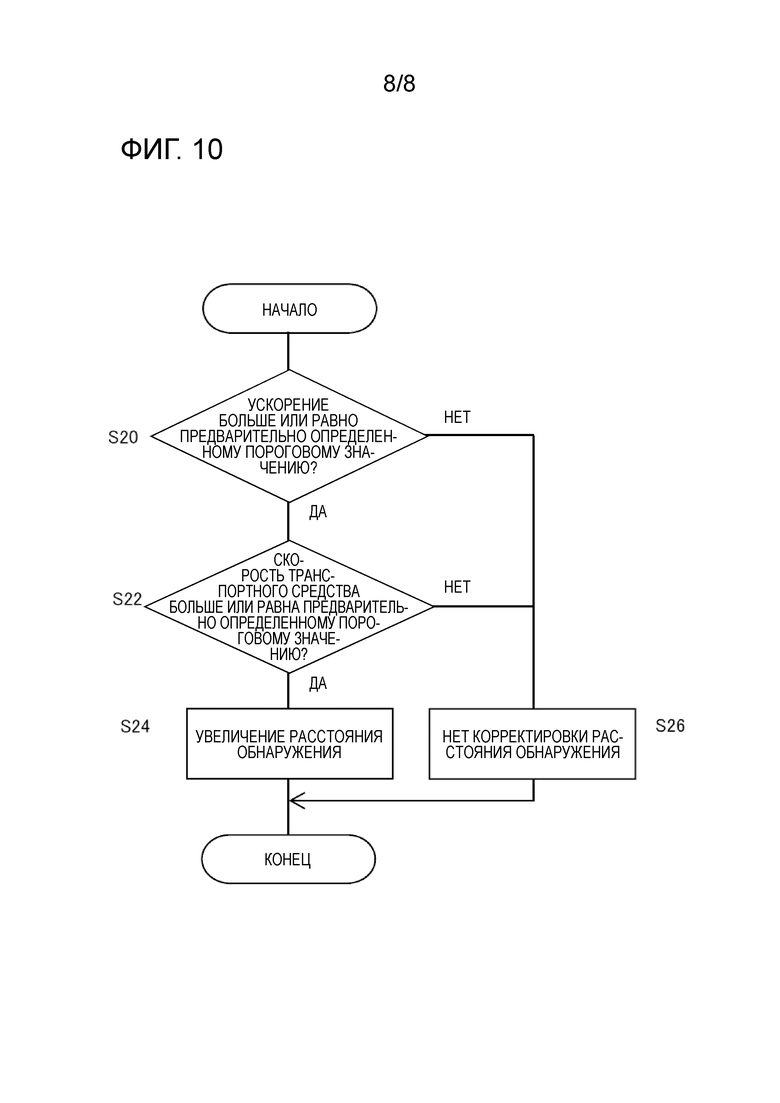
Фиг. 10 - это блок-схема последовательности операций, описывающая управление расстоянием радиолокационного обнаружения согласно второму варианту осуществления.
Варианты осуществления для выполнения изобретения
(1) Первый вариант осуществления
Устройство 10 управления движением согласно первому варианту осуществления будет описано со ссылкой на фиг. 1-6.
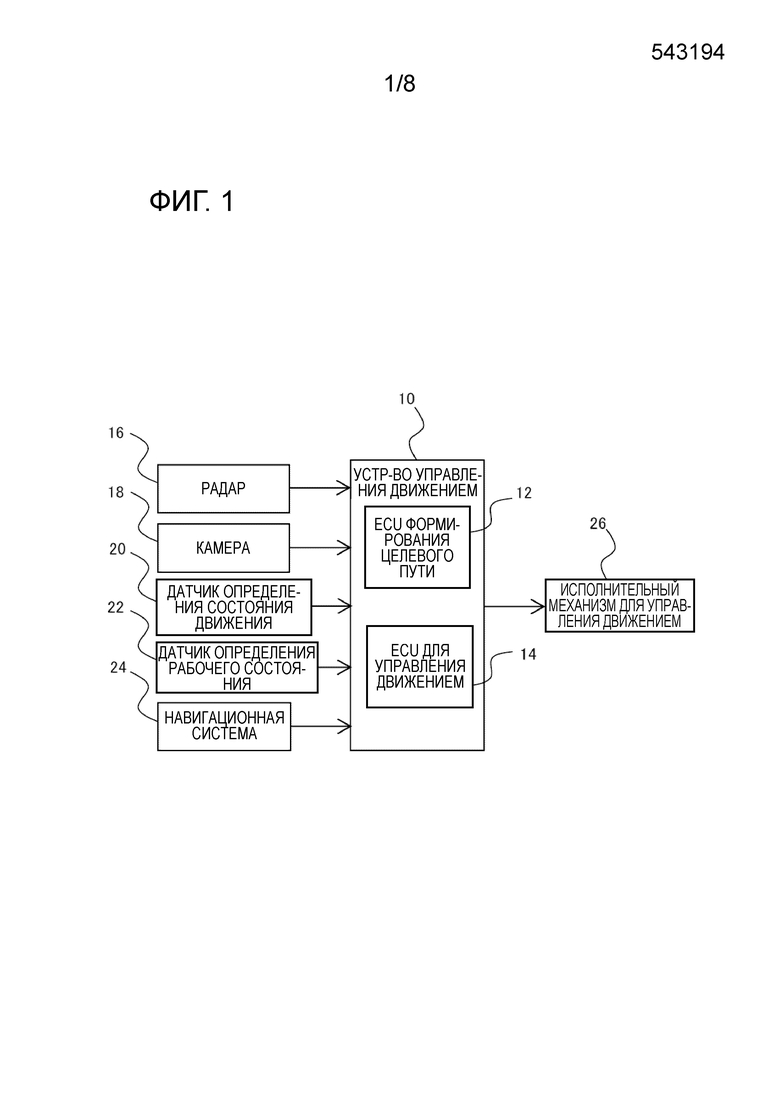
Фиг. 1 - это блок-схема, иллюстрирующая устройство 10 управления движением согласно варианту осуществления изобретения. Устройство 10 управления движением - это устройство, установленное в транспортном средстве, и устройство для автономного управления движением транспортного средства по курсу (маршруту) от пункта отправления до пункта назначения, который вычисляется с помощью навигационной технологии, или т.п. В частности, устройство 10 управления движением делит курс от пункта отправления до пункта назначения на предварительно определенные участки, обновляет целевой маршрут, который показывает траекторию движения транспортного средства и поведение транспортного средства (например, скорость транспортного средства, ускорение, угол поворота рулевого колеса и т.д.) для каждого участка и управляет движением транспортного средства на основе целевого маршрута.
Устройство 10 управления движением содержит ECU (электронный блок управления) 12 формирования целевого маршрута и ECU 14 управления движением, как иллюстрировано на фиг. 1. Кроме того, радар 16 (блок измерения расстояния), камера 18, датчик 20 определения состояния движения, датчик 22 определения рабочего состояния, навигационная система 24 и т.п. электрически соединяются с устройством 10 управления движением, как иллюстрировано на фиг. 1. Кроме того, исполнительный механизм (актуатор) 26 для управления движением электрически соединяется с устройством 10 управления движением. Устройство 10 управления движением может быть соответственно соединено с другими хорошо известными конфигурациями, такими как блок связи, для выполнения связи между транспортными средствами.
ECU 12 формирования целевого маршрута и ECU 14 управления движением, каждый, являются электронными блоками управления, содержат CPU (центральный процессор) и память, такую как ROM (постоянное запоминающее устройство), RAM (оперативное запоминающее устройство) и т.п. ECU 12 формирования целевого маршрута получает картографическую информацию и курс от пункта отправления до пункта назначения, найденный посредством навигационной системы 24, и вычисляет целевой маршрут, который представляет траекторию движения транспортного средства и поведение транспортного средства для каждого предварительно определенного участка, который задан по курсу, как иллюстрировано на фиг. 2. ECU 14 управления движением управляет движением транспортного средства на основе целевого маршрута, сформированного посредством ECU 12 формирования целевого маршрута. Например, ECU 14 управления движением вычисляет величину управления движением для рассматриваемого транспортного средства, такую как ускорение/замедление и угол поворота рулевого колеса, на основе целевого маршрута, сформированного посредством ECU 12 формирования целевого маршрута, также как данных от радара 16, камеры 18, датчика 20 определения состояния движения, датчика 22 определения рабочего состояния и навигационной системы 24. Кроме того, ECU 14 управления движением управляет исполнительным механизмом 26 для управления движением на основе величины управления движением. На фиг. 1 ECU 12 формирования целевого маршрута и ECU 14 управления движением описываются как независимые ECU, но оба могут быть сконфигурированы как единое целое при необходимости.
Радар 16 обнаруживает присутствие, позицию (расстояние и угол от транспортного средства) и скорость, также как относительную скорость относительно рассматриваемого транспортного средства, для транспортного средства, мотоцикла, велосипеда, пешехода и т.п., окружающих рассматриваемое транспортное средство. Радар 16 содержит, например, лазерный радар, радар миллиметрового диапазона, ультразвуковой радар или т.п. Радар 16 выводит обнаруженные данные в устройство 10 управления движением. Поскольку хорошо известный радар может быть соответствующим образом использован в качестве радара 16, подробное описание конфигурации будет опущено.
Камера 18, например, прикрепляется к передней или боковой части рассматриваемого транспортного средства и захватывает изображение окружения рассматриваемого транспортного средства. Например, камера 18 захватывает полосы участка дороги и препятствия по курсу. Камера 18 содержит элемент формирования изображения, такой как CCD (устройство с зарядовой связью) или CMOS (комплементарный металло-оксидный полупроводник). Камера 18 выводит захваченное изображение в устройство 10 управления движением. Поскольку хорошо известная камера может быть соответствующим образом использована в качестве камеры 18, подробное описание конфигурации будет опущено.
Датчик 20 состояния движения определяет состояние движения (например, скорость транспортного средства, ускорение, угол поворота вокруг вертикальной оси и т.д.) рассматриваемого транспортного средства. Датчик 20 состояния движения имеет, например, датчик скорости колеса, предусмотренный для каждого колеса рассматриваемого транспортного средства, и определяет состояние движения рассматриваемого транспортного средства, такое как скорость транспортного средства, измеряя скорость колеса. Датчик 20 состояния движения выводит обнаруженное состояние движения рассматриваемого транспортного средства в устройство 10 управления движением. Поскольку хорошо известный датчик скорости транспортного средства, датчик ускорения и датчик угла поворота вокруг вертикальной оси могут быть использованы в качестве датчика 20 состояния движения, подробное описание конфигурации будет опущено.
Датчик 22 для определения рабочего состояния определяет рабочее состояние рассматриваемого транспортного средства. В частности, датчик 22 для определения рабочего состояния обнаруживает приведение в действие акселератора, приведение в действие тормоза, приведение в действие рулевого колеса (руление) и т.п. пользователем, который едет в транспортном средстве (далее в данном документе называемым водителем). Датчик 22 рабочего состояния выводит обнаруженное рабочее состояние рассматриваемого транспортного средства в устройство 10 управления движением. Поскольку хорошо известный датчик приведения в действие акселератора, датчик приведения в действие тормоза и датчик рулевого управления могут быть использованы в качестве датчика 22 рабочего состояния, подробное описание конфигурации будет опущено.
Навигационная система 24 принимает GPS-сигналы от GPS-спутника (системы глобального позиционирования). Кроме того, навигационная система 24 может содержать гироскоп, который обнаруживает величину поворотного движения, применяемого к транспортному средству, датчик ускорения, который определяет расстояние перемещения транспортного средства из ускорения в трех осевых направлениях, и т.п., и геомагнитный датчик, который определяет направление движения транспортного средства из геомагнетизма или т.п. Навигационная система 24 хранит картографическую информацию на носителе хранения, таком как жесткий диск. Эта картографическая информация содержит информацию, относящуюся к местоположениям и формам дорог и перекресткам, и к правилам дорожного движения, включающим в себя дорожные знаки, сигналы и т.п. Кроме того, картографическая информация может задавать область проезда транспортного средства на полосе движения на дороге. Навигационная система 24 обнаруживает позицию рассматриваемого транспортного средства и ориентацию относительно дороги, на основе картографической информации и GPS-сигналов от GPS-спутника. Навигационная система 24 отыскивает курс от пункта отправления до пункта назначения, согласно входным данным о пункте отправления (или текущей позиции) и пункте назначения, и выполняет направление по маршруту до пункта назначения, с помощью найденного курса и позиционной информации рассматриваемого транспортного средства. Кроме того, навигационная система 24 выводит найденный курс устройству 10 управления движением вместе с картографической информацией. Поскольку хорошо известная навигационная система может быть соответствующим образом использована в качестве навигационной системы 24, подробное описание конфигурации будет опущено.
Исполнительный механизм 26 для управления движением содержит исполнительный механизм ускорения/замедления для ускорения и замедления рассматриваемого транспортного средства и исполнительный механизм рулевого управления, который регулирует угол поворота рулевого колеса. Исполнительный механизм 26 управления движением управляет движением рассматриваемого транспортного средства, инструктируя исполнительному механизму ускорения/замедления и исполнительному механизму рулевого управления срабатывать, на основе величины управления движением, которая передается от ECU 14 управления движением.
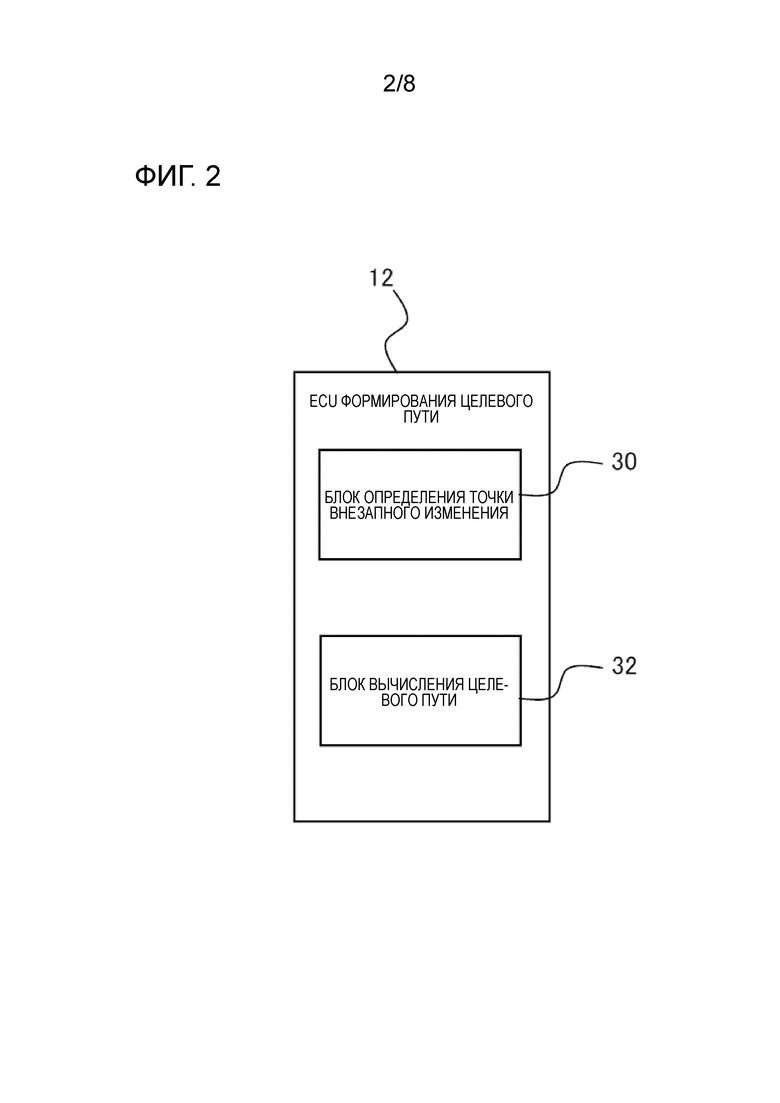
Далее, формирование целевого маршрута посредством ECU 12 формирования целевого маршрута будет описано со ссылкой на фиг. 2-6. ECU 12 формирования целевого маршрута содержит блок 30 определения способа формирования и блок 32 вычисления целевого маршрута (блок корректировки), как иллюстрировано на фиг. 2.
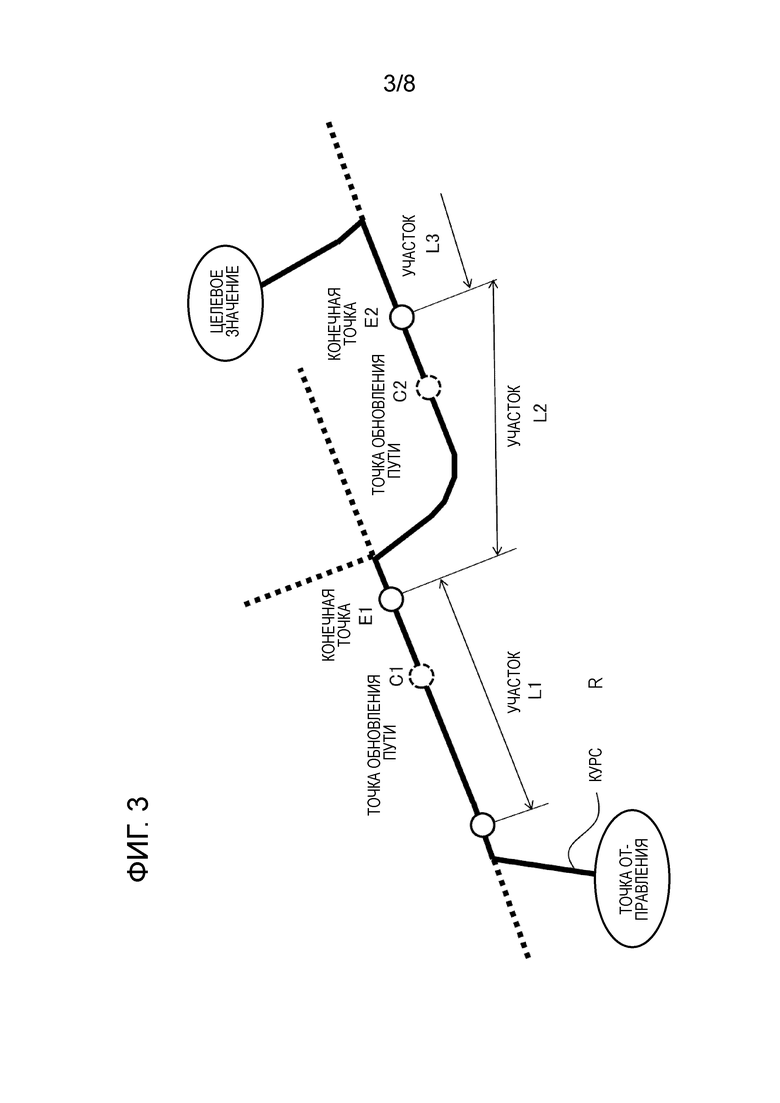
ECU 12 формирования целевого маршрута получает картографическую информацию и курс от пункта отправления до пункта назначения, найденный посредством навигационной системы 24, вычисляет целевой маршрут, который представляет траекторию движения транспортного средства и поведение транспортного средства для каждого предварительно определенного участка, который задан по курсу, и обновляет целевой маршрут для каждого участка. В частности, ECU 12 формирования целевого маршрута получает картографическую информацию вместе с курсом R от пункта отправления до пункта назначения, найденным посредством навигационной системы 24, как иллюстрировано на фиг. 3. Затем, ECU 12 формирования целевого маршрута делит курс R от пункта отправления до пункта назначения на предварительно определенные участки и обновляет целевой маршрут для каждого участка. В настоящем варианте осуществления, например, участки задаются посредством деления курса R каждые 200 м. Конечно, способ деления участков не ограничивается этим расстоянием и может быть расстоянием, которое отличается от этого расстояния. Кроме того, необязательно, чтобы участки были разделены на одинаковые расстояния, и способ деления может быть изменен при необходимости. Некоторые из последовательных участков, разделенных таким образом, указываются как участок L0, участок L1, участок L2, участок L3... на фиг. 3.
Кроме того, точка обновления маршрута для обновления целевого маршрута задается в каждом из участков. На фиг. 3 точки обновления маршрута для участков L1 и L2 соответственно указываются как точки C1 и C2 обновления маршрута. В настоящем варианте осуществления, когда рассматриваемое транспортное средство проезжает точку обновления маршрута участка с помощью навигационной системы 24, или т.п., ECU 12 формирования целевого маршрута вычисляет целевой маршрут от точки обновления маршрута до конечной точки следующего участка и обновляет целевой маршрут. На фиг. 3, например, когда рассматриваемое транспортное средство проезжает точку C1 обновления маршрута для участка L1, ECU 12 формирования целевого маршрута вычисляет целевые маршруты от точки C1 обновления маршрута до конечной точки E1 для участка L1 и от конечной точки E1 для участка L1 (точки начала участка L2) до конечной точки E2 для участка L2 и обновляет целевой маршрут, который в настоящее время используется, вновь вычисленным целевым маршрутом. То же обновление целевого маршрута также выполняется на участке L2. В частности, когда рассматриваемое транспортное средство проезжает точку C2 обновления маршрута участка L2, ECU 12 формирования целевого маршрута вычисляет целевые маршруты от точки C2 обновления маршрута до конечной точки E2 участка L2, и от конечной точки E2 участка L2 (точки начала участка L3) до конечной точки участка L3, и обновляет целевой маршрут, вычисленный в точке C1 обновления маршрута участка L1, вновь вычисленным целевым маршрутом. В настоящем варианте осуществления, например, точка обновления маршрута задается в позицию перед конечной точкой участка на предварительно определенном расстоянии (т.е. позицию, в которой оставшееся расстояние участка становится предварительно определенным расстоянием). Например, в настоящем варианте осуществления, это предварительно определенное расстояние устанавливается равным 50 м. Конечно, позиция точки обновления маршрута не ограничивается этой позицией и может быть позицией, которая отличается от этой позиции. Кроме того, точка обновления маршрута может быть задана в позиции, в которой время, остающееся до того момента, когда транспортное средство достигает конечной точки участка, становится предварительно определенным временем или менее.
Настоящий вариант осуществления характеризуется тем, что целевая скорость транспортного средства, содержащаяся в сформированной информации о целевом маршруте, корректируется при необходимости, для того, чтобы уменьшать дискомфорт, который чувствует пользователь.
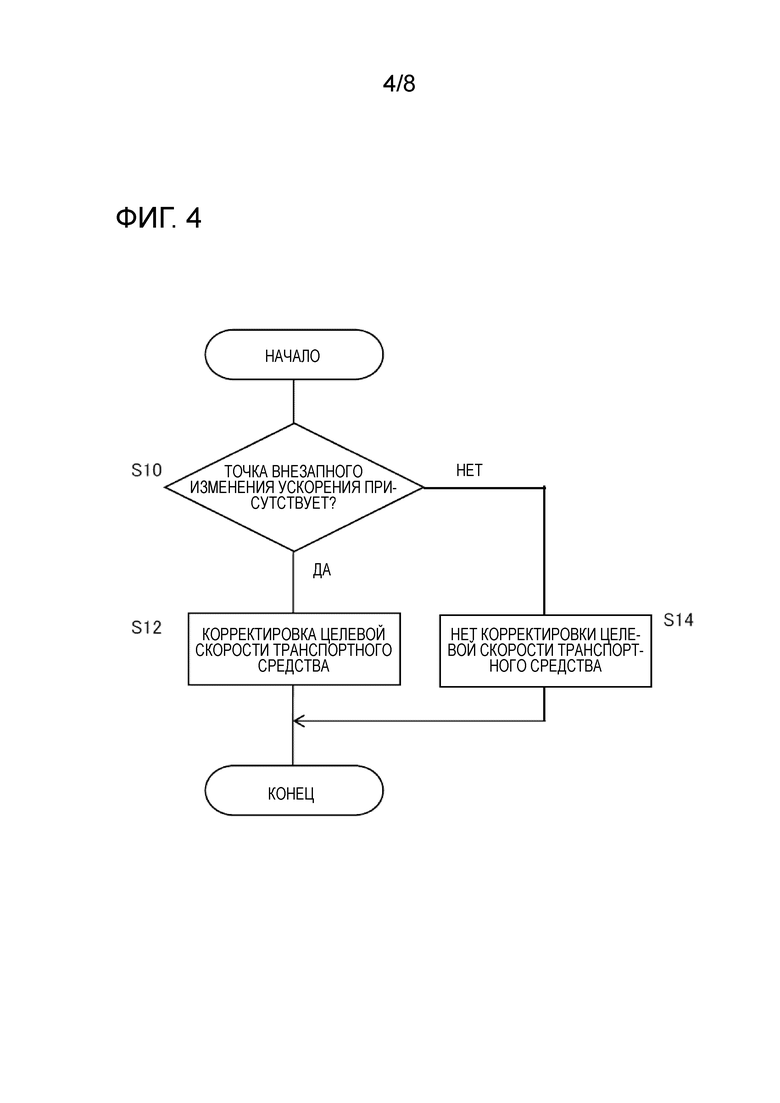
Корректировка целевой скорости транспортного средства согласно настоящему варианту осуществления будет описана с помощью фиг. 4-8. Фиг. 4 - это блок-схема последовательности операций, описывающая корректировку целевой скорости транспортного средства согласно настоящему изобретению. Фиг. 5 и фиг. 6 - это графики, описывающие целевую скорость транспортного средства перед корректировкой, а фиг. 7 и фиг. 8 - это графики, описывающие целевую скорость транспортного средства после корректировки.
Операции блока 30 определения точки внезапного изменения (блока определения) и блока 32 вычисления целевого маршрута (блока корректировки) ECU 12 формирования целевого маршрута согласно настоящему варианту осуществления будут описаны со ссылкой на блок-схему последовательности операций на фиг. 4. Блок-схема последовательности операций на фиг. 4 выполняется после того, как целевой маршрут обновляется в каждой из точек обновления маршрута, как описано выше.
Блок 30 определения точки внезапного изменения определяет, присутствует или нет точка, в которой существует внезапное изменение в ускорении (т.е. точка, в которой ускорение изменяется сверх предварительно определенного условия), в сформированном целевом маршруте (целевой скорости транспортного средства) (этап S10). В качестве примера предварительно определенного условия, которое используется для определения присутствия точки внезапного изменения на этапе S10, точка, в которой изменения ускорения могут быть обнаружены в характере целевой скорости транспортного средства, и может быть определено, что предварительно определенное условие было превышено, когда отношение ускорения перед изменением к ускорению после изменения, по сравнению с предварительно определенным пороговым значением, больше порогового значения. Кроме того, например, даже при переключении с ускорения на замедление после периода холостого хода для движения с постоянной скоростью, если период постоянного движения меньше предварительно определенного периода (например, трех секунд), можно определять, что точка внезапного изменения присутствует. Если транспортное средство замедляется, знак ускорения становится отрицательным. Возможным примером случая, в котором существует внезапное изменение в ускорении, является случай, в котором ускорение для целевого маршрута увеличивается вследствие увеличения ограничения скорости для пути движения, но необходимо выполнять замедление во время ускорения или непосредственно после завершения ускорения, вследствие присутствия точки остановки (сигнала светофора, знака СТОП или т.п.) или точки, требующей замедления (извилистый путь или т.п.) на пути движения после этого. Пример целевой скорости в таком случае иллюстрируется в графике на фиг. 5. На фиг. 5 транспортное средство продолжает ускорение до времени t1, и скорость транспортного средства достигает V1, но транспортное средство замедляется до остановки со времени t1. Следовательно, временная диаграмма целевой скорости, иллюстрированная на фиг. 5, имеет форму шеврона с заостренным наконечником, имеющим внезапное изменение ускорения в точке P. Когда такое внезапное изменение точки P ускорения присутствует, поведение транспортного средства внезапно переключается с ускорения на замедление, таким образом, существует опасение возникновения дискомфорта у пользователя.
Кроме того, на фиг. 6, транспортное средство продолжает ускорение до времени t1, и скорость транспортного средства достигает V1; затем, после движения с постоянной скоростью, транспортное средство замедляется до остановки со времени t1'. Внезапное изменение точки P ускорения также присутствует, когда период этого движения с постоянной скоростью (период со времени t1 до времени t1') меньше предварительно определенного периода (например, трех секунд), и поведение транспортного средства внезапно переключается с ускорения на замедление, таким образом, существует опасение возникновения дискомфорта у пользователя. Следовательно, в настоящем варианте осуществления, также определяется, что внезапное изменение точки P ускорения присутствует, когда период холостого хода между движением с ускорением и движением с замедлением меньше предварительно определенного периода, как иллюстрировано на фиг. 6.
Т.е. в настоящем варианте осуществления, блок 30 определения точки внезапного изменения определяет, что точка P внезапного изменения присутствует, когда период движения с постоянной скоростью между движением с ускорением и движением с замедлением, или между движением с замедлением и движением с ускорением, короче предварительно определенного периода, при изменении движения с ускорением на движение с замедлением, или с движения с замедлением на движение с ускорением, в целевой скорости транспортного средства. Т.е. определяя, что точка P внезапного изменения присутствует, не только, когда период движения с постоянной скоростью между движением с ускорением и движением с замедлением отсутствует (когда период движения с постоянной скоростью равен 0), как иллюстрировано во временной диаграмме на фиг. 5, но также когда период движения с постоянной скоростью короче предварительно определенного периода (например, трех секунд), как иллюстрировано на графике на фиг. 6, представляется возможным уменьшать шанс того, что у пользователя возникает дискомфорт, вследствие поведения транспортного средства, меняющегося относительно быстро.
Следовательно, в настоящем варианте осуществления, если блок 30 определения точки внезапного изменения определяет, что точка P внезапного изменения ускорения присутствует на целевом маршруте (Да на этапе S10), блок 32 вычисления целевого маршрута корректирует целевую скорость для целевого маршрута, так что точка P внезапного изменения устраняется (этап S12). С другой стороны, если блок 30 определения точки внезапного изменения определяет, что точка внезапного изменения ускорения не присутствует на целевом маршруте (Нет на этапе S10), блок 32 вычисления целевого маршрута заканчивает последовательность операций управления, иллюстрированную на фиг. 4, без корректировки целевой скорости для целевого маршрута (этап S14).
Т.е. устройство формирования целевой скорости транспортного средства для транспортного средства согласно настоящему варианту осуществления содержит блок 30 определения точки внезапного изменения (блок определения) и блок 32 вычисления целевого маршрута (блок корректировки). Блок 30 определения точки внезапного изменения определяет, присутствует или нет точка внезапного изменения, в которой ускорение изменяется внезапно, в целевой скорости транспортного средства, содержащейся в информации о целевом маршруте транспортного средства, которая задается заранее. Блок 32 вычисления целевого маршрута корректирует целевую скорость транспортного средства так, чтобы устранять точку внезапного изменения, если определяется, что точка внезапного изменения присутствует, посредством блока 30 определения точки внезапного изменения. Соответственно, представляется возможным уменьшать дискомфорт, который ощущается пользователем, который вызывается внезапным изменением в поведении транспортного средства.
В частности, на этапе S12, блок 32 вычисления целевого маршрута прекращает ускорение в момент времени, который предшествует моменту начала замедления перед корректировкой, и корректирует целевую скорость, так что замедление начинается после обеспечения предварительно определенного периода холостого хода. В графике на фиг. 7 целевая скорость, иллюстрированная на фиг. 5, была скорректирована посредством блока 32 вычисления целевого маршрута. Дополнительно, на фиг. 8, целевая скорость, иллюстрированная на фиг. 6, была скорректирована посредством блока 32 вычисления целевого маршрута. Целевая скорость после корректировки корректируется так, что ускорение прекращается во время t2, которое является более ранним моментом времени, чем время t1, и замедление начинается со времени t3, чтобы останавливать транспортное средство, после выполнения движения с постоянной скоростью в течение предварительно определенного периода FP холостого хода, со скоростью V2 транспортного средства, которая ниже скорости V1 транспортного средства, как иллюстрировано на фиг. 7 и фиг. 8. Блок 32 вычисления целевого маршрута задает t2 так, что площадь фрагмента A и площадь фрагмента A' на фиг. 7 являются одинаковыми, чтобы корректировать целевую скорость транспортного средства и обеспечивать предварительно определенный период FP холостого хода, так что позиция остановки транспортного средства будет такой же, что и до и после корректировки. Устраняя момент P внезапного изменения и обеспечивая предварительно определенный период FP холостого хода таким образом, представляется возможным плавно переходить от ускорения к замедлению, без возникновения дискомфорта у пользователя. Кроме того, в примере на фиг. 8, t3 может быть дополнительно предусмотрено так, что период FP холостого хода становится предварительно определенным временем или более (например, три секунды), после которого целевая скорость транспортного средства может быть скорректирована так, что позиция остановки и ускорения станут соответствующими значениями, для того, чтобы уменьшать дискомфорт пользователя.
Т.е. в настоящем варианте осуществления, блок 32 вычисления целевого маршрута корректирует целевую скорость транспортного средства так, чтобы устранять точку P внезапного изменения, заканчивая ускорение или замедление во время t2 (второй момент времени), которое предшествует времени t1 (первому моменту времени), соответствующему точке P внезапного изменения, если определяется, что точка P внезапного изменения присутствует, посредством блока 30 определения точки внезапного изменения. Устраняя точку P внезапного изменения и заканчивая ускорение или замедление во время t2, которое является более ранним моментом времени, чем время t1, таким образом, представляется возможным плавно переходить от движения с ускорением к движению с замедлением, или от движения с замедлением к движению с ускорением, без возникновения дискомфорта у пользователя.
Дополнительно, в настоящем варианте осуществления, блок 32 вычисления целевого маршрута корректирует целевую скорость транспортного средства так, чтобы устранять точку P внезапного изменения, начиная предварительно определенный период FP холостого хода во время t2 (второй момент времени), которое предшествует времени t1 (первому моменту времени), соответствующему точке P внезапного изменения, если определяется, что точка P внезапного изменения присутствует, посредством блока 30 определения точки внезапного изменения. Устраняя точку P внезапного изменения и обеспечивая предварительно определенный период FP холостого хода таким образом, представляется возможным плавно переходить от движения с ускорением к движению с замедлением, или от движения с замедлением к движению с ускорением, без возникновения дискомфорта у пользователя.
Кроме того, в настоящем варианте осуществления, блок 30 определения точки внезапного изменения определяет, существует или нет точка P внезапного изменения, которая изменяет движение с ускорением на движение с замедлением в целевой скорости транспортного средства. Блок 32 вычисления целевого маршрута корректирует целевую скорость транспортного средства так, чтобы устранять точку P внезапного изменения, заканчивая ускорение в момент времени, в который скорость транспортного средства для транспортного средства достигает скорости V2 транспортного средства (второй скорости транспортного средства), которая ниже скорости V1 транспортного средства (первой скорости транспортного средства), соответствующей точке P внезапного изменения. Заканчивая ускорение прежде, чем скорость транспортного средства увеличивается, в момент времени, в который скорость транспортного средства достигает скорости V2 транспортного средства, которая ниже скорости V1 транспортного средства, таким образом, представляется возможным плавно переходить от движения с ускорением к движению с замедлением, без возникновения дискомфорта у пользователя.
Кроме того, в настоящем варианте осуществления, блок 30 определения точки внезапного изменения определяет, существует или нет точка P внезапного изменения, которая изменяет движение с ускорением на движение с замедлением в целевой скорости транспортного средства. Блок 32 вычисления целевого маршрута корректирует целевую скорость транспортного средства так, чтобы устранять точку P внезапного изменения, начиная движение с замедлением после движения в течение предварительно определенного периода со скоростью V2 транспортного средства (второй скоростью транспортного средства), которая ниже скорости V1 транспортного средства (первой скорости транспортного средства), соответствующей точке P внезапного изменения. Посредством устранения точки P внезапного изменения и движения в течение периода времени со скоростью V2 транспортного средства, которая ниже скорости V1 транспортного средства, таким образом, представляется возможным плавно переходить от движения с ускорением к движению с замедлением, без возникновения дискомфорта у пользователя.
Здесь, предварительно определенный период FP холостого хода может быть задан в соответствующее значение, например, три секунды. Кроме того, предварительно определенный период FP холостого хода может быть задан так, чтобы изменяться согласно ускорению и скорости транспортного средства.
Т.е. блок 32 вычисления целевого маршрута может задавать предварительно определенный период холостого хода переменным, в соответствии, по меньшей мере, с одним из скорости транспортного средства и ускорения, соответствующим точке P внезапного изменения. Например, задавая предварительно определенный период FP холостого хода более длительным, когда ускорение или скорость транспортного средства увеличивается, представляется возможным плавно переходить от движения с ускорением или движения с замедлением с достаточным запасом, даже когда ускорение или скорость транспортного средства является высокой.
Кроме того, блок 32 вычисления целевого маршрута может задавать время t2 (второй момент времени) переменным, в соответствии, по меньшей мере, с одним из скорости транспортного средства и ускорения, соответствующим точке P внезапного изменения. Кроме того, момент времени начала периода FP холостого хода (время t2) предпочтительно устанавливается в более ранний момент времени, когда ускорение увеличивается. Устанавливая момент времени начала периода FP холостого хода в более раннее время, когда ускорение увеличивается, таким образом, представляется возможным начинать период FP холостого хода, прежде чем скорость транспортного средства становится чрезмерно высокой, и плавно переходить к замедлению, даже когда ускорение является большим, и скорость транспортного средства будет достигать высокой скорости в короткий период времени. Кроме того, в примерах на фиг. 7 и фиг. 8 ускорение заканчивается, и движение с постоянной скоростью со скоростью V2 транспортного средства начинается в момент времени t2; однако, ускорение может быть уменьшено в момент времени t2, так что спокойное движение с ускорением, или спокойное движение с замедлением, выполняется в течение периода FP холостого хода, или движение с постоянной скоростью может выполняться до окончания периода FP холостого хода после движения с небольшим ускорением для заданного периода. Т.е. управление скоростью транспортного средства в течение периода FP холостого хода не ограничивается движением с постоянной скоростью, пока целевая скорость транспортного средства такова, что представляется возможным устранять точку P внезапного изменения, иллюстрированную на фиг. 5 и фиг. 6, и плавно переходить от ускорения к замедлению.
Примеры, в которых транспортное средство, в конечном счете, останавливается, описываются на фиг. 5-8, но то же управление также выполняется, когда запрос замедления выводится во время ускорения или непосредственно после ускорения. Примером случая, в котором запрос замедления выводится во время ускорения или непосредственно после ускорения, является случай, в котором точка, которая требует замедления, такая как изгиб, присутствует после точки, в которой ограничение скорости для пути движения увеличивается.
Как описано выше, в устройстве управления движением согласно первому варианту осуществления, определяется, присутствует или нет точка, в которой ускорение внезапно изменяется, на созданном целевом маршруте транспортного средства, и если такая точка внезапного изменения присутствует, целевая скорость корректируется так, что точка внезапного изменения устраняется, и замедление начинается после предварительно определенного периода холостого хода после ускорения. Следовательно, представляется возможным устранять возникновение дискомфорта у пользователя, который вызывается внезапным переходом от ускорения к замедлению, или от замедления к ускорению.
Случаи, в которых транспортное средство ускоряется, описываются на фиг. 5-8 первого варианта осуществления; однако, корректировка целевого маршрута согласно первому варианту осуществления может также быть применена, когда транспортное средство внезапно переходит от замедления к ускорению.
(2) Второй вариант осуществления
Устройство 10 управления движением согласно второму варианту осуществления будет описано, с дополнительной ссылкой на фиг. 9 и фиг. 10.
Во втором варианте осуществления конфигурациям и этапам, которые функционируют таким же или аналогичным образом, что и в первом варианте осуществления, предоставляются те же ссылочные символы, и их описания опускаются. Устройство 10 управления движением согласно второму варианту осуществления (ссылка на фиг. 1) конфигурируется так, что, когда транспортное средство автономно движется посредством автономного управления движением, становится возможным плавно переключаться с ускорения на замедление, обеспечивая период холостого хода в течение предварительно определенного периода между движением с ускорением и движением с замедлением, если инструкция замедления или инструкция остановки выводится во время ускорения или непосредственно после ускорения.
В частности, устройство 10 управления движением согласно второму варианту осуществления конфигурируется так, что становится возможным плавно переключаться с ускорения на замедление, обеспечивая период холостого хода в течение предварительно определенного периода между движением с ускорением и движением с замедлением, управляя чувствительностью обнаружения (расстоянием обнаружения) радара 16 в соответствии с ускорением транспортного средства (ссылка на фиг. 1).
Фиг. 9 - это блок-схема, иллюстрирующая ECU 14 управления движением согласно второму варианту осуществления. ECU 14 управления движением согласно второму варианту осуществления содержит блок 34 определения ускорения, который определяет, больше или нет ускорение транспортного средства, чем предварительно определенное пороговое значение ускорения, и блок 36 настройки расстояния обнаружения, который увеличивает расстояние обнаружения радара 16, если определяется, что ускорение транспортного средства больше предварительно определенного порогового значения ускорения, посредством блока 34 определения ускорения. Во втором варианте осуществления блок 34 определения ускорения дополнительно определяет, больше или нет скорость транспортного средства предварительно определенного порогового значения скорости, и блок 36 настройки расстояния обнаружения увеличивает расстояние обнаружения радара 16, если определяется, что скорость транспортного средства больше предварительно определенного порогового значения скорости.
Фиг. 10 - это блок-схема последовательности операций, описывающая управление расстоянием радиолокационного обнаружения согласно второму варианту осуществления. Процесс, указанный в блок-схеме последовательности операций на фиг. 10, повторяющимся образом выполняется с предварительно определенными интервалами (например, каждые 10-50 миллисекунд), в то же время, когда начинается автономное движение транспортного средства.
Блок 34 определения ускорения определяет, превышает или нет ускорение транспортного средства предварительно определенное пороговое значение ускорения, из результата определения датчика 20 определения состояния движения, во время автономного управления движением транспортного средства (этап S20). Если ускорение превышает предварительно определенное пороговое значение (Да на этапе S20), далее определяется, превышает или нет скорость транспортного средства предварительно определенное пороговое значение скорости транспортного средства (этап S22). Если скорость транспортного средства превышает предварительно определенное пороговое значение скорости транспортного средства (Да на этапе S22), определяется, что как ускорение, так и скорость транспортного средства, являются высокими, и расстояние обнаружения для радара (чувствительность обнаружения) увеличивается посредством блока 36 настройки расстояния обнаружения (этап S24). С другой стороны, если ускорение не больше предварительно определенного порогового значения (Нет на этапе S20), или если скорость транспортного средства не больше предварительно определенного порогового значения (Нет на этапе S22), последовательность управления, иллюстрированная на фиг. 10, заканчивается, без корректировки расстояния обнаружения для радара 16 (этап S26).
Т.е. устройство управления движением настоящего варианта осуществления является устройством управления движением транспортного средства, которое имеет блок измерения расстояния (например, радар 16), который измеряет расстояние до объекта, который должен быть измерен, содержит блок 34 определения ускорения, который определяет, больше или нет ускорение транспортного средства предварительно определенного порогового значения ускорения, и блок 36 настройки расстояния обнаружения, который увеличивает расстояние обнаружения блока измерения расстояния (например, радара 16), если определяется, что ускорение транспортного средства больше предварительно определенного порогового значения ускорения, посредством блока 34 определения ускорения. Соответственно, становится возможным обнаруживать объект, который должен быть измерен, такой как пешеход или препятствие, в более ранний момент времени, когда ускорение является высоким. Соответственно, представляется возможным управлять поведением транспортного средства (например, прекращать ускорение) в более ранний момент времени, когда объект, который должен быть измерен, присутствует, и плавно переходить от ускорения к замедлению.
Кроме того, блок 34 определения ускорения согласно настоящему варианту осуществления определяет, больше или нет скорость транспортного средства предварительно определенного порогового значения времени, и блок 36 настройки расстояния обнаружения увеличивает расстояние обнаружения для блока измерения расстояния (например, радара 16), если определяется, что скорость транспортного средства больше предварительно определенного порогового значения скорости. Следовательно, становится возможным также обнаруживать объект, который должен быть измерен, такой как пешеход или препятствие, в более ранний момент времени, когда скорость транспортного средства является высокой. Соответственно, представляется возможным управлять поведением транспортного средства (например, прекращать ускорение) в более ранний момент времени, когда объект, который должен быть измерен, присутствует, и плавно переходить от ускорения к замедлению.
Здесь, увеличение в расстоянии обнаружения посредством блока 36 настройки расстояния обнаружения на этапе S24 может быть единообразно задано в предварительно определенное расстояние обнаружения, или может быть переменным образом задано согласно значению ускорения и/или скорости транспортного средства. Например, расстояние обнаружения для радара 16 может быть задано более значительным, когда ускорение и/или скорость транспортного средства увеличивается. Т.е. блок 36 настройки расстояния обнаружения может увеличивать расстояние обнаружения, когда ускорение транспортного средства и/или скорость транспортного средства увеличивается. Задавая расстояние обнаружения для радара 16 более значительным, когда ускорение и/или скорость транспортного средства увеличивается, таким образом, становится возможным обнаруживать препятствие и начинать период FP холостого хода, прежде чем скорость транспортного средства становится чрезмерно высокой, даже когда ускорение является высоким, и скорость транспортного средства достигнет высокой скорости в короткий период времени.
Т.е. управляя расстоянием обнаружения для радара 16, которое должно увеличиваться, когда ускорение и скорость транспортного средства увеличиваются, становится возможным обнаруживать препятствия на пути движения в более ранний момент времени во время ускорения, чем во время без ускорения, и становится возможным прекращать ускорение и обеспечивать период холостого хода, прежде чем скорость транспортного средства становится высокой.
Здесь, управление второго варианта осуществления будет описано с помощью графика на фиг. 7 для первого варианта осуществления в качестве примера. На фиг. 7, если расстояние обнаружения для радара 16 равно 100 м, и предполагается, что препятствие и т.д., которое находится в 100 м впереди, обнаруживается в момент времени t1 во время ускорения, инструкция остановки транспортного средства выводится во время t1; следовательно, ускорение внезапно изменяется на замедление в точке P внезапного изменения, соответствующей времени t1. Таким образом, если точка P внезапного изменения присутствует, существует риск того, что у пользователя возникает дискомфорт.
Следовательно, во втором варианте осуществления, если ускорение и скорость транспортного средства становятся больше их соответствующих пороговых значений во время автономного управления движением, расстояние обнаружения для радара 16 задается, например, равным 150 м, которое больше 100 м. Соответственно, становится возможным обнаруживать препятствие, и т.д., во время t2, которое является моментом времени, который предшествует времени t1 на фиг. 7. Следовательно, представляется возможным прекращать ускорение во время t2 и начинать замедление со времени t3, чтобы останавливать транспортное средство, после выполнения движения с постоянной скоростью в течение предварительно определенного периода FP холостого хода, со скоростью V2 транспортного средства, которая ниже скорости V1 транспортного средства. Соответственно, представляется возможным плавно переходить от ускорения к замедлению. Здесь, предварительно определенный период FP холостого хода может быть задан в соответствующее значение, например, три секунды. Кроме того, предварительно определенный период FP холостого хода может быть задан так, чтобы изменяться согласно ускорению и скорости транспортного средства. Дополнительно, управление скоростью транспортного средства в течение предварительно определенного периода FP не ограничивается движением с постоянной скоростью, тем же образом, что и в первом варианте осуществления. Кроме того, описывается пример, в котором транспортное средство, в конечном счете, останавливается на фиг. 7, но то же управление также выполняется, когда запрос замедления выводится во время ускорения или непосредственно после ускорения. Примером случая, в котором запрос замедления выводится во время ускорения или непосредственно после ускорения, является случай, в котором рассматриваемое транспортное средство ускоряется и приближается к движущемуся впереди транспортному средству, в управлении следования за движущимся впереди транспортным средством.
Между тем, и управление, относящееся к настройке целевой скорости при формировании целевого маршрута согласно первому варианту осуществления, и управление расстоянием обнаружения для радара 16 во время автономного управления движением согласно второму варианту осуществления, также могут выполняться. В этом случае устройство управления движением содержит блок 34 определения ускорения, который определяет, больше или нет ускорение транспортного средства предварительно определенного порогового значения, и блок 36 настройки расстояния обнаружения, который увеличивает расстояние обнаружения блока измерения расстояния (например, радара 16), если определяется, что ускорение транспортного средства больше предварительно определенного порогового значения ускорения, посредством блока 34 определения ускорения, и дополнительно снабжается устройством формирования целевой скорости транспортного средства, содержащим блок 30 определения точки внезапного изменения (блок определения), который определяет, присутствует или нет точка P внезапного изменения, в которой существует внезапное изменение в ускорении, в целевой скорости транспортного средства, содержащейся в информации о целевом маршруте транспортного средства, которая задается заранее, и блок 32 вычисления целевого маршрута (блок корректировки), который корректирует целевую скорость транспортного средства так, что точка P внезапного изменения устраняется, если блок 30 определения точки внезапного изменения определяет, что точка P внезапного изменения присутствует. Соответственно, становится возможным дополнительно уменьшать частоту возникновения характера движения, при котором точка P внезапного изменения ускорения присутствует, и надежно избегать передачи дискомфорта пользователю.
В первом и втором вариантах осуществления, описанных выше, автономное управление движением выполняется посредством ECU 14 управления движением; однако, формирование целевого маршрута из настоящей заявки может быть использовано, даже если полностью автономное управление движением не выполняется, или даже когда автономное управление движением не выполняется вообще. Например, целевой маршрут, сформированный посредством ECU 12 формирования целевого маршрута, может быть просто сообщен водителю, или условия движения для осуществления сформированного целевого маршрута могут быть сообщены пользователю. В этих случаях поддержка вождения для поддержки вождения для пользователя (водителя) будет выполняться вместо автономного управления движением. Кроме того, даже если полностью автономное управление движением не выполняется, помощь при вождении может быть выполнена, такая как выполнение только ускорения/замедления или только рулевое управление посредством устройства 10 управления движением.
Описания ссылочных символов
10 Устройство управления движением
12 ECU формирования целевого маршрута
14 ECU управления движением
30 Блок определения точки внезапного изменения (блок определения)
32 Блок вычисления целевого маршрута (блок корректировки)
34 Блок определения ускорения
36 Блок настройки расстояния обнаружения
Изобретение относится к системам управления транспортным средством. Устройство формирования целевой скорости транспортного средства для транспортного средства содержит блок определения и блок корректировки. Блок определения определяет присутствует или нет точка внезапного изменения, в которой ускорение изменяется сверх предварительно определенного условия, в целевой скорости транспортного средства, содержащейся в информации о целевом маршруте транспортного средства, которая задается заранее. Блок корректировки корректирует целевую скорость транспортного средства так, чтобы устранять точку внезапного изменения, если определяется, что точка внезапного изменения присутствует, посредством блока определения. Достигается повышение безопасности управления транспортным средством. 2 н. и 11 з.п. ф-лы, 10 ил.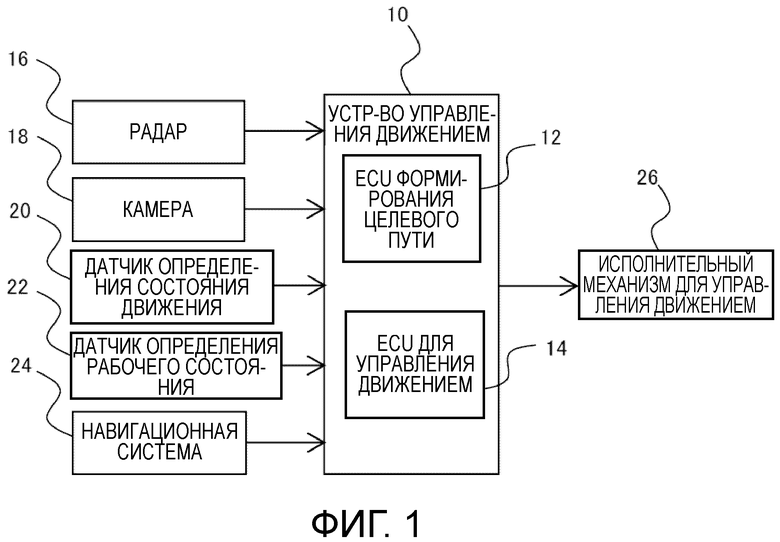
1. Устройство формирования целевой скорости транспортного средства для транспортного средства, содержащее:
блок определения, который определяет, присутствует или нет точка внезапного изменения, в которой ускорение изменяется сверх предварительно определенного условия, в целевой скорости транспортного средства, содержащейся в информации о целевом маршруте транспортного средства, которая задается заранее; и
блок корректировки, который корректирует целевую скорость транспортного средства так, чтобы устранять точку внезапного изменения, если определяется, что точка внезапного изменения присутствует, посредством блока определения.
2. Устройство формирования целевой скорости транспортного средства по п. 1, в котором блок корректировки корректирует целевую скорость транспортного средства так, чтобы устранять точку внезапного изменения, заканчивая ускорение или замедление во второй момент времени, который предшествует первому моменту времени, соответствующему точке внезапного изменения, если определяется, что точка внезапного изменения присутствует, посредством блока определения.
3. Устройство формирования целевой скорости транспортного средства по п. 1, в котором блок корректировки корректирует целевую скорость транспортного средства так, чтобы устранять точку внезапного изменения, начиная предварительно определенный период холостого хода со второго момента времени, который предшествует первому моменту времени, соответствующему точке внезапного изменения, если определяется, что точка внезапного изменения присутствует, посредством блока определения.
4. Устройство формирования целевой скорости транспортного средства по п. 1, в котором
блок определения определяет, существует или нет точка внезапного изменения, в которой движение с ускорением изменяется на движение с замедлением в целевой скорости транспортного средства; и
блок корректировки корректирует целевую скорость транспортного средства так, чтобы устранять точку внезапного изменения, заканчивая ускорение в момент времени, в который скорость транспортного средства для транспортного средства достигает второй скорости транспортного средства, которая ниже первой скорости транспортного средства, соответствующей точке внезапного изменения.
5. Устройство формирования целевой скорости транспортного средства по п. 1, в котором
блок определения определяет, существует или нет точка внезапного изменения, в которой движение с ускорением изменяется на движение с замедлением в целевой скорости транспортного средства; и
блок корректировки корректирует целевую скорость транспортного средства так, чтобы устранять точку внезапного изменения, начиная замедление после движения в течение предварительно определенного периода со второй скоростью транспортного средства, которая ниже первой скорости транспортного средства, соответствующей точке внезапного изменения.
6. Устройство формирования целевой скорости транспортного средства по п. 1, в котором блок определения определяет, что точка внезапного изменения присутствует, когда период движения с постоянной скоростью между движением с ускорением и движением с замедлением, или между движением с замедлением и движением с ускорением, короче предварительно определенного периода, при переходе от движения с ускорением к движению с замедлением, или от движения с замедлением к движению с ускорением, в целевой скорости транспортного средства.
7. Устройство формирования целевой скорости транспортного средства по п. 2, в котором блок корректировки задает предварительно определенный период холостого хода в соответствии по меньшей мере с одним из скорости транспортного средства и ускорения, соответствующим точке внезапного изменения.
8. Устройство формирования целевой скорости транспортного средства по п. 2, в котором блок корректировки задает второй момент времени в соответствии по меньшей мере с одним из скорости транспортного средства и ускорения, соответствующим точке внезапного изменения.
9. Устройство управления движением транспортного средства, имеющее блок измерения расстояния, который измеряет расстояние до объекта, который подлежит измерению, содержащее:
блок определения ускорения, который определяет, больше или нет ускорение транспортного средства предварительно определенного порогового значения ускорения; и
блок настройки расстояния обнаружения, который увеличивает расстояние обнаружения для блока измерения расстояния, если определяется, что ускорение транспортного средства больше предварительно определенного порогового значения ускорения посредством блока определения ускорения.
10. Устройство управления движением по п. 9, в котором
блок определения ускорения определяет, больше или нет скорость транспортного средства предварительно определенного порогового значения скорости; и
блок настройки расстояния обнаружения увеличивает расстояние обнаружения блока измерения расстояния, если скорость транспортного средства больше предварительно определенного порогового значения скорости.
11. Устройство управления движением по п. 9, в котором блок настройки расстояния обнаружения увеличивает расстояние обнаружения, когда ускорение транспортного средства увеличивается.
12. Устройство управления движением по п. 9, в котором блок настройки расстояния обнаружения увеличивает расстояние обнаружения, когда ускорение транспортного средства или скорость транспортного средства увеличивается.
13. Устройство управления движением по п. 9, дополнительно содержащее устройство формирования целевой скорости транспортного средства, содержащее:
блок определения, который определяет, присутствует или нет точка внезапного изменения, в которой ускорение изменяется сверх предварительно определенного условия, в целевой скорости транспортного средства, содержащейся в информации о целевом маршруте транспортного средства, которая задается заранее; и
блок корректировки, который корректирует целевую скорость транспортного средства так, чтобы устранять точку внезапного изменения, если определяется, что точка внезапного изменения присутствует, посредством блока определения.
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| JP 2009262895 A, 12.11.2009 | |||
| СПОСОБ И СИСТЕМА УПРАВЛЕНИЯ СИСТЕМОЙ АВТОМАТИЧЕСКОГО ПОДДЕРЖАНИЯ СКОРОСТИ ТРАНСПОРТНОГО СРЕДСТВА | 2009 |
|
RU2521931C2 |

