Область техники
[0001] Настоящее изобретение относится к способу генерирования информации о среде передвижения, который относится к управлению движением, способу управления движением и устройству генерирования информации о среде передвижения.
Уровень техники
[0002] Известен способ, который включает в себя извлечение информации о различиях между трехмерной информацией, обнаруженной вокруг транспортного средства бортовым датчиком, и информацией трехмерной карты и корректировку трехмерной информации, обнаруженной бортовым датчиком, если определено, что информация о различиях объясняется внутренним различием, происходящим от устройства бортового датчика или т.п., например, положения установки бортового датчика (Патентный Документ 1).
Патентный Документ
[0003] Патентный документ 1: публикация WO 2016/027394
Задачи, решаемые изобретением
[0004] В описанном выше традиционном способе, если извлеченная информация о различиях является информацией о различиях, присущих транспортному средству, корректирующая информация, присущая транспортному средству, генерируется для корректировки трехмерной информации вокруг транспортного средства, но ничего не исследуется для определения времени использования информации обнаружения от бортового датчика при корректировке информации карты.
[0005] Задача, которую необходимо решить с помощью настоящего изобретения, состоит в том, чтобы надлежащим образом управлять временем выполнения процесса генерирования информации о среде передвижения.
Средства для решения задач
[0006] Настоящее изобретение решает указанную выше задачу путем получения первой информации на основе информации обнаружения от бортового датчика и второй информации о полосах движения с информацией карты, хранящейся в запоминающем устройстве, и, когда определяется, что дорога движения, к которой принадлежит полоса движения рассматриваемого транспортного средства, является заданной конкретной дорогой, объединения первой информации и второй информации для генерирования информации о среде передвижения.
В частности, согласно первому объекту настоящего изобретения создан способ генерирования информации о среде передвижения для транспортного средства, выполняемый процессором и включающий:
получение первой информации относительно окружающей среды передвижения, включая полосу движения, по которой движется рассматриваемое транспортное средство, причем первая информация основана на информации обнаружения от датчика, установленного на рассматриваемом транспортном средстве;
обращение к информации карты, хранящейся в запоминающем устройстве, для получения второй информации, касающейся полос дороги;
извлечение признаков дороги движения, к которой принадлежит полоса движения, по которой движется рассматриваемое транспортное средство, на основе первой информации;
определение того, является ли дорога движения, к которой принадлежит полоса движения, заданной конкретной дорогой, на основе признаков дороги движения; и
объединение первой информации и второй информации для генерирования информации о среде передвижения для транспортного средства, когда определено, что дорога движения является конкретной дорогой.
Предпочтительно, способ включает определение того, является ли дорога движения конкретной дорогой, на основе первой информации и второй информации.
Предпочтительно, способ включает:
получение количества полос, принадлежащих дороге движения; и,
когда количество полос движения является заданным количеством, определение того, что дорога движения является конкретной дорогой.
Предпочтительно, способ включает:
получение количества полос, принадлежащих дороге движения;
определение того, являются ли количество полос во входящем направлении и количество полос в исходящем направлении одной; и,
когда определено, что количество полос движения во входящем направлении дороги движения и количество полос в исходящем направлении проезжей дороги равны одной, определение того, что дорога движения является конкретной дорогой.
Предпочтительно, способ включает:
получение количества полос, принадлежащих дороге движения;
определение того, равно ли количество полос движения во входящем или исходящем направлении одной; и,
когда определено, что количество полос движения во входящем или исходящем направлении дороги движения равно одной, определение того, что дорога движения является конкретной дорогой.
Предпочтительно, способ включает:
получение изменения количества полос на стороне направления движения полосы движения; и,
когда определяется, что количество полос изменяется с двух или более на одну, определение того, что дорога движения является конкретной дорогой.
Предпочтительно, способ включает:
получение количества полос, принадлежащих дороге движения; и,
когда определено, что количество полос на дороге движения равно двум или более, и дорога движения может быть указана относительно того, по какой полосе из полос дороги движения движется транспортное средство, на основе рисунков разметок полос, которые определяют полосы, принадлежащие дороге движения, определение того, что дорога движения является конкретной дорогой.
Предпочтительно, способ включает:
получение количества полос дороги движения; и,
когда определено, что количество полос во входящем направлении или исходящем направлении дороги движения равно двум или более, и можно указать, по какой полосе из полос дороги движения движется транспортное средство, на основе рисунка разметки полос, определяющего полосы во входящем направлении или полосы в исходящем направлении, определение того, что дорога движения является конкретной дорогой.
Предпочтительно, способ включает:
получение количества полос дороги движения; и,
когда определено, что количество полос во входящем направлении или количество полос в исходящем направлении дороги движения равно двум или более, и полосы во входящем направлении или полосы в исходящем направлении определяются заданной характеристикой разметки полос, определение того, что дорога движения является конкретной дорогой.
Предпочтительно, способ включает вычисление разницы между первой информацией и второй информацией и объединение первой информации и второй информации на основе указанной разницы.
Предпочтительно, способ включает объединение первой информации и второй информации на основе разницы в положении между первой информацией и второй информацией так, чтобы полоса движения и целевая полоса информации карты, соответствующей полосе движения, были соединены.
Предпочтительно, способ включает объединение первой информации и второй информации на основе разницы в положении между первой информацией и второй информацией так, чтобы были соединены первая область, включающая полосу движения, и вторая область, включающая целевую полосу из информации карты, соответствующей полосе движения.
Предпочтительно, способ включает, когда определено, что полоса движения является конкретной полосой, ослабление условия связывания полосы движения и целевой полосы друг с другом.
Предпочтительно, способ включает, когда определено, что полоса движения является конкретной полосой движения, изменение информации разметки полосы на основе первой информации, причем информация разметки полосы включается во вторую информацию и связывается с целевой полосой информации карты, соответствующей полосе движения.
Предпочтительно, способ включает:
накопление историй передвижений, включая первую информацию и местоположения передвижений, обнаруженных в прошлом; и,
когда определяется, что полоса движения является конкретной полосой, объединение первой информации и второй информации на основе истории передвижений, среди историй передвижений, связанных с дорогой движения, в которой количество проездов рассматриваемого транспортного средства является заданным количеством раз или более.
Предпочтительно, способ включает:
накопление историй передвижений, включая первую информацию и местоположения передвижений, переданные на сервер по линии связи; и,
когда определяется, что полоса движения является конкретной полосой, обращение к эталонной истории передвижений, среди историй передвижений, связанных с дорогой, в которой количество проездов рассматриваемого транспортного средства является заданным числом раз или более для объединения первой информации эталонной истории передвижений и второй информации.
Согласно второму объекту настоящего изобретения создан способ управления движением для транспортного средства, включающий:
обращение к информации о среде передвижения для транспортного средства, полученной вышеописанным способом генерирования информации о среде передвижения для транспортного средства;
вычисление маршрута движения рассматриваемого транспортного средства на основе информации о среде передвижения для транспортного средства; и
обеспечение движения рассматриваемого транспортного средства по маршруту движения.
Предпочтительно, способ включает:
объединение первой информации и второй информации для генерирования информации о среде передвижения для транспортного средства, так что соединяются полоса движения и целевая полоса информации карты, соответствующей полосе движения; и
вычисление на основе информации о среде передвижения для транспортного средства маршрута движения, включающего в себя точку соединения между полосой движения и целевой полосой информации карты, соответствующей полосе движения.
Предпочтительно, способ включает:
получение первой информации и второй информации относительно полосы, существующей в положении дальше, чем окрестности рассматриваемого транспортного средства, в соответствии со средой передвижения, полученной с помощью первой информации;
объединение первой информации и второй информации для генерирования информации о среде передвижения для транспортного средства, так что соединяются полоса движения и целевая полоса информации карты, соответствующей полосе движения; и
расчет маршрута передвижения на основе информации о среде передвижения для транспортного средства.
Согласно третьему объекту настоящего изобретения создано устройство генерирования информации о среде передвижения для транспортного средства, содержащее:
устройство связи, выполненное с возможностью получения информации обнаружения от датчика, установленного на рассматриваемом транспортном средстве; и
процессор, выполненный с возможностью выполнения процесса генерирования информации о среде передвижения для транспортного средства,
при этом процессор выполняет:
процесс получения информации обнаружения через устройство связи;
процесс получения первой информации относительно окружающей среды передвижения, включая полосу движения, по которой движется рассматриваемое транспортное средство, причем первая информация основана на информации обнаружения от датчика;
процесс обращения к информации карты, хранящейся в запоминающем устройстве, для получения второй информации, касающейся полос дороги;
процесс извлечения признаков дороги движения, которой принадлежит полоса движения, по которой движется рассматриваемое транспортное средство, на основе первой информации;
процесс определения того, является ли дорога движения, которой принадлежит полоса движения, заданной конкретной дорогой на основе признаков дороги движения; и
процесс объединения первой информации и второй информации для генерирования информации о среде передвижения для транспортного средства, когда определено, что дорога движения является конкретной дорогой.
Эффект изобретения
[0007] Согласно настоящему изобретению информация о среде передвижения генерируется тогда, когда рассматриваемое транспортное средство движется по конкретной дороге, и, следовательно, может быть сгенерирована информация о среде передвижения, в которой первая информация и вторая информация объединены соответствующим образом.
Краткое описание чертежей
[0008] Фиг. 1 - блок-схема системы управления движением согласно одному или более вариантам осуществления настоящего изобретения.
Фиг. 2А - набор схем для описания конкретных дорог.
Фиг. 2B - схема для описания дороги (не конкретной дороги), которая не является конкретной дорогой.
Фиг. 3A - набор схем для описания случая, когда возникает несовпадение между полосой движения и целевой полосой.
Фиг. 3B - набор схем для описания примера процесса соединения для полосы движения и целевой полосы.
Фиг. 4 - набор схем для описания примера процесса генерирования информации о среде передвижения.
Фиг. 5A - первая схема для описания процесса объединения.
Фиг. 5B - вторая схема для описания процесса объединения.
Фиг. 5C - третья схема для описания процесса объединения.
Фиг. 6 - блок-схема последовательности операций, иллюстрирующая процедуру управления, выполняемую системой управления движением в соответствии с одним или более вариантами осуществления настоящего изобретения.
Фиг. 7 - блок-схема, иллюстрирующая подпрограмму этапа S7 процедуры управления, показанной на Фиг. 6.
Вариант(ы) осуществления настоящего изобретения
[0009] Далее один или более вариантов осуществления настоящего изобретения будут описаны со ссылкой на чертежи. В вариантах осуществления настоящее изобретение будет описано на примере случая, в котором способ генерирования информации о среде передвижения и устройство генерирования информации о среде передвижения согласно настоящему изобретению применяются к системе управления движением.
[0010] Фиг. 1 является схемой, иллюстрирующей блочную конфигурацию системы 1 управления движением. Система 1 управления движением согласно одному или более вариантам осуществления настоящего изобретения включает в себя устройство 100 генерирования информации о среде передвижения, бортовое устройство 200 и устройство 400 управления движением. Система 1 управления движением может дополнительно включать в себя сервер 300, с которым устройство 100 генерирования информации о среде передвижения может обмениваться информацией через устройство 30 связи. Каждое из системы 1 управления движением, устройства 100 генерирования информации о среде передвижения, бортового устройства 200, сервера 300, устройства 400 управления движением и различных модулей, предусмотренных в нем, может быть компьютером, который включает в себя вычислительное устройство, такое как одно или более ЦП (CPU), и выполняет вычислительные процессы.
Устройство 100 генерирования информации о среде передвижения может быть сконфигурировано как аппаратное обеспечение, интегрированное с устройством 400 управления движением и/или бортовым устройством, или также может быть сконфигурировано как распределенные отдельные устройства. Один или более вариантов осуществления настоящего изобретения будут описаны на примере системы управления движением, которая сконфигурирована так, что устройство 100 генерирования информации о среде передвижения обменивается информацией и взаимодействует с бортовым устройством 200, установленным на транспортном средстве, и устройством 400 управления движением через устройство 30 связи.
[0011] Далее будет описано бортовое устройство 200.
Бортовое устройство 200 получает информацию обнаружения, касающуюся рассматриваемого транспортного средства и ситуации вокруг рассматриваемого транспортного средства и выводит полученную информацию обнаружения наружу. Бортовое устройство 200 управляет управляемым транспортным средством, чтобы оно двигалось автономно, на основе команды от устройства 400 управления движением. Бортовое устройство 200 согласно одному или более вариантам осуществления настоящего изобретения включает в себя устройство 210 связи, устройство 220 обнаружения, навигационное устройство 230, запоминающее устройство 240, устройство вывода 250, датчик 260 транспортного средства, устройство 270 удержания полосы движения, контроллер 280 транспортного средства, приводное устройство 290 и рулевое устройство 295.
[0012] Устройство 210 связи выполняет связь между устройствами бортового устройства 200 и связь с внешним сервером 300. Устройства, составляющие бортовое устройство 200, соединены друг с другом через сеть контроллеров (CAN) или другую бортовую LAN (устройство 210 связи) для взаимного обмена информацией. Бортовое устройство 200 может обмениваться информацией с устройством 100 генерирования информации о среде передвижения и устройством 400 управления движением через такую бортовую LAN (устройство 210 связи). Бортовое устройство 200 обменивается информацией с внешним сервером 300 через устройство 210 связи, которое выполняет беспроводную связь.
[0013] Устройство 220 обнаружения получает информацию обнаружения вокруг рассматриваемого транспортного средства, которое движется по маршруту. Устройство 220 обнаружения транспортного средства распознает наличие, положение и область полосы движения, по которой движется транспортное средство, и обнаруживает наличие, существующие положения и существующие области объектов, включая препятствия, которые существуют вокруг полосы движения. Хотя это и не ограничивается особым образом, устройство 220 обнаружения включает в себя камеру 221. Камера 221 представляет собой, например, устройство генерирования изображения, включающее в себя элемент генерирования изображения, такой CCD. Камера 221 также может быть инфракрасной камерой или стереокамерой. Камера 221 расположена в определенном положении транспортного средства и захватывает изображения разметок полосы движения полосы движения для транспортного средства и объектов вокруг транспортного средства. Термин «вокруг транспортного средства», используемый здесь, охватывает понятия «впереди транспортного средства», «позади транспортного средства», «сбоку впереди транспортного средства» и «сбоку позади транспортного средства». Объекты включают двумерные знаки, такие как разметки полос и стоп-линии, нарисованные на поверхности дороги. Объекты включают трехмерные физические объекты. К объектам относятся стационарные объекты, например, дорожные знаки. К объектам относятся движущиеся объекты, например, пешеходы, двухколесные и четырехколесные транспортные средства (другие транспортные средства). К объектам относятся и дорожные конструкции, включающие полосы движения, такие как ограждения и бордюры, светофоры, знаки и устройства отображения.
[0014] Устройство 220 обнаружения анализирует данные изображения и на основе результатов анализа распознает наличие, положения и области полосы движения, по которой движется рассматриваемое транспортное средство, и полосы движения в непосредственной близости от нее. Устройство 220 обнаружения распознает наличие или отсутствие, положения и типы разметок полосы движения. Устройство 220 обнаружения распознает наличие, положение, занятые области и типы объектов.
[0015] Устройство 220 обнаружения включает в себя радарное устройство 222. Примеры радарного устройства 222 для использования включают такие, как радар миллиметрового диапазона, лазерный радар, ультразвуковой радар и лазерный дальномер, схемы которых известны на момент подачи настоящей заявки. Устройство 220 обнаружения обнаруживает присутствие или отсутствие объектов, положение объектов и расстояния до объектов на основе принятых сигналов от радарного устройства 222. Устройство 220 обнаружения обнаруживает присутствие или отсутствие объектов, положения объектов и расстояния до объектов на основе результатов кластеризации информации облака точек, которую получает радар.
[0016] Устройство 220 обнаружения может получать информацию обнаружения маршрута движения от внешних устройств через устройство 210 связи. Например, когда сервер 300 собирает информацию обнаружения, которая получена от устройств 220 обнаружения множества других транспортных средств, через устройство 330 связи и накапливает собранную информацию обнаружения, каждое устройство 220 обнаружения может получить информацию обнаружения другого транспортного средства и/или информацию определения на основе информации обнаружения от сервера 300. Когда сервер 300 управляет информацией обнаружения от других транспортных средств как так называемой проверочной информацией, устройство 100 генерирования информации о среде передвижения может использовать эту информацию. На основе информации об обнаружении от других транспортных средств, которые ранее двигались по полосе движения, устройство 100 генерирования информации о среде передвижения может генерировать информацию 24 о среде передвижения и определять точность информации обнаружения от рассматриваемого транспортного средства.
[0017] Дополнительно или альтернативно, когда устройство 210 связи способно осуществлять связь между другими транспортными средствами и рассматриваемым транспортным средством, устройство 220 обнаружения может получать информацию обнаружения от других транспортных средств. Конечно, устройство 220 обнаружения также может получать информацию о полосе движения или дороге, включая полосу движения, в качестве информации обнаружения от внешнего устройства интеллектуальной транспортной системы (ITS) через устройство 210 связи. Устройство 220 обнаружения может получать информацию в непосредственной близости от транспортного средства с помощью бортового устройства 220 обнаружения и может получать информацию в области, удаленной от транспортного средства на заданное расстояние или более от внешнего устройства, расположенного на обочине дороги, через устройство 210 связи.
[0018] Устройство 220 обнаружения может включать в себя устройство 223 определения положения. В одном или более вариантах осуществления настоящего изобретения получают результаты обнаружения от устройства 231 определения положения навигационного устройства 230.
Устройство 220 обнаружения последовательно выводит результаты обнаружения в процессор 11.
[0019] Навигационное устройство 230 вычисляет маршрут от текущего местоположения транспортного средства до пункта назначения, используя схему, известную на момент подачи настоящей заявки. Вычисленный маршрут передается в устройство 400 управления движением и/или контроллер 280 транспортного средства для использования при управлении движением транспортного средства. Рассчитанный маршрут выводится как информация о маршруте через устройство 250 вывода, которое будет описано далее. Навигационное устройство 230 включает в себя устройство 231 определения положения. Устройство 231 определения местоположения включает в себя приемник глобальной системы определения местоположения (GPS) и определяет положение во время движения (значения широты/долготы/координат на карте) движущегося транспортного средства. Текущая позиционная информация передается в процессор 11 в качестве информации обнаружения. Дополнительно или в качестве альтернативы принятым сигналам от спутников позиционирования, одометрическая информация или информация от датчика ориентации или датчика 260 транспортного средства могут использоваться для вычисления позиционной информации.
[0020] Навигационное устройство 230 обращается к запоминающему устройству 240 и обращается к информации 241 карты, информации 242 полосы движения и информации 243 регулирования дорожного движения. Навигационное устройство 230 указывает полосу движения, по которой движется транспортное средство, на основе текущего положения транспортного средства, обнаруженного устройством 231 определения положения. Полоса движения может быть частью маршрута к пункту назначения, который назначается пользователем, или также может быть частью маршрута к пункту назначения, который оценивается на основе истории передвижений транспортного средства/пользователя. Навигационное устройство 230 обращается к информации 241 карты, которая будет описана позже, и т.п., чтобы указать полосу движения, по которой движется транспортное средство.
[0021] Устройство 250 вывода включает в себя дисплей 251 и динамик 252. Устройство 250 вывода выводит различные элементы информации, касающиеся управления движением, пользователю или пассажирам окружающих транспортных средств. Устройство 250 вывода выводит информацию относительно величины рассогласования между полосой движения и полосой движения из информации 241 карты, содержания изменения первой информации и/или второй информации, созданного плана действий при вождении и управления движением на основе план действий по вождению. Устройство 250 вывода может выводить различные элементы информации, относящиеся к управлению движением, на внешнее устройство интеллектуальной транспортной системы или т.п. через устройство связи.
[0022] Датчик 260 транспортного средства имеет датчик 261 угла поворота рулевого колеса, датчик 262 скорости транспортного средства и датчик 263 положения. Датчик 261 угла поворота рулевого колеса обнаруживает информацию, такую как величина поворота, скорость поворота и ускорение поворота, и выводит обнаруженную информацию на контроллер 280 транспортного средства. Датчик 262 скорости транспортного средства определяет скорость вращения колеса и/или ускорение и выводит обнаруженную скорость и/или ускорение на контроллер 280 транспортного средства. Датчик 263 ориентации определяет положение транспортного средства, угол наклона транспортного средства, угол рыскания транспортного средства и угол крена транспортного средства и выдает обнаруженные значения в контроллер 280 транспортного средства. Датчик 263 ориентации включает в себя гироскопический датчик. Датчик 264 яркости определяет яркость вокруг транспортного средства.
[0023] Устройство 270 удержания полосы движения определяет полосу движения по изображениям, снятым камерой 221. Устройство 270 удержания полосы движения имеет функцию предотвращения съезда с полосы движения (функция поддержки удержания полосы движения) для управления движением транспортного средства, чтобы поддерживать определенную взаимосвязь между положением разметки полосы движения и положением транспортного средства. Устройство 400 управления движением управляет движением транспортного средства, так что транспортное средство движется в определенном поперечном положении (например, в центре) полосы движения. Разметка полосы не ограничена при условии, что она имеет функцию определения полосы движения. Разметка полосы движения может быть линией, проведенной на поверхности дороги, озеленением, которое существует между полосами движения, или дорожной структурой, которая существует на стороне обочины полосы движения, например, ограждением, бордюром, тротуаром, дорожной полосой или отдельной дорогой на два колеса. Разметка полосы также может быть стационарным объектом, который существует на стороне обочины полосы движения, например, рекламным дисплеем, дорожным знаком, магазином или придорожным деревом.
[0024] Контроллер 280 транспортного средства согласно одному или более вариантам осуществления настоящего изобретения выполняет управление движением транспортного средства в соответствии с планом вождения, созданным процессором 411 управления движением. Контроллер 280 транспортного средства управляет датчиком 260 транспортного средства, приводным устройством 290 и рулевым устройством 295. Контроллер 280 транспортного средства получает информацию о транспортном средстве от датчика 260 транспортного средства. Контроллер 280 транспортного средства согласно одному или более вариантам осуществления настоящего изобретения является бортовым компьютером, таким как электронный блок управления (ЭБУ), и электронным образом управляет движением/работой транспортного средства. Транспортное средство согласно одному или более вариантам осуществления настоящего изобретения может быть, например, электромобилем, имеющим электродвигатель в качестве источника ходового привода, автомобилем с двигателем, имеющим двигатель внутреннего сгорания в качестве источника ходового привода, или гибридным автомобилем, имеющим как электродвигатель, так и двигатель внутреннего сгорания в качестве источников движения. Примеры электромобиля или гибридного автомобиля, имеющего электродвигатель в качестве источника движущегося привода, включают в себя тип, в котором источником энергии для электродвигателя является вторичная батарея, и тип, в котором источником энергии для электродвигателя является топливный элемент. Контент управления, выполняемый устройством 270 удержания полосы движения, может выполняться контроллером 280 транспортного средства.
[0025] Приводное устройство 290 согласно одному или более вариантам осуществления настоящего изобретения включает в себя приводной механизм транспортного средства. Приводной механизм включает в себя электродвигатель и/или двигатель внутреннего сгорания в качестве вышеописанных источников ходового привода, устройство передачи мощности, включающее приводной вал и автоматическую трансмиссию, которая передает выходной сигнал от источников ходового привода на ведущие колеса, тормозное устройство, тормозящее колеса, и другие необходимые компоненты. Приводное устройство 290 генерирует соответствующие управляющие сигналы для этих компонентов приводного механизма и выполняет управление движением, включая ускорение/замедление транспортного средства. Эти управляющие сигналы для приводного механизма генерируются на основе входных сигналов при работе акселератора и при торможении, а также управляющих сигналов, полученных от контроллера 280 транспортного средства или устройства 400 управления движением. Управляющая информация может передаваться на приводное устройство 290, которое, таким образом, может выполнять управление движением, включая ускорение/замедление транспортного средства, в автоматическом или автономном режиме. В случае гибридного автомобиля приводное устройство 290 может принимать отношение крутящего момента, выходящего к электродвигателю, и крутящего момента, выходящего для двигателя внутреннего сгорания, в соответствии с состоянием движения транспортного средства.
[0026] Рулевое устройство 295 согласно одному или более вариантам осуществления настоящего изобретения включает в себя рулевой привод. Привод рулевого управления включает двигатель и другие необходимые компоненты, прикрепленные к валу рулевой колонки. Устройство 295 рулевого управления выполняет управление изменением направления движения транспортного средства на основе управляющего сигнала, полученного от контроллера 280 транспортного средства, или входного сигнала посредством операции рулевого управления. Контроллер 280 транспортного средства передает управляющую информацию, включая величину рулевого управления, на устройство 295 рулевого управления, тем самым выполняя управление изменением направления движения. Управление приводным устройством 290 и/или управление устройством 295 рулевого управления может выполняться полностью автоматизированным или автономным образом или в форме помощи водителю в процессе движения (управление движением). Управление приводным устройством 290 и управление рулевым устройством 295 может быть приостановлено/отменено из-за операции вмешательства водителя.
[0027] Далее будет описано оборудование 400 управления движением.
Устройство 400 управления движением включает в себя устройство 410 управления, запоминающее устройство 420 и устройство 430 связи. Устройство 400 управления движением может дополнительно включать в себя устройство вывода. Устройство вывода работает таким же образом, как ранее описанное устройство 250 вывода бортового устройства 200. Устройство 410 управления и запоминающее устройство 420 могут обмениваться информацией друг с другом через проводную или беспроводную линию связи. Устройство 430 связи выполняет обмен информацией с бортовым устройством 200, обмен информацией внутри устройства 400 управления движением и обмен информацией между внешними устройствами и системой 1 управления движением.
[0028] Устройство 410 управления включает в себя процессор 411 управления движением. Процессор 411 управления движением представляет собой вычислительное устройство, которое выполняет процесс управления движением, включая генерирование плана движения транспортного средства. В частности, процессор 11 управления движением представляет собой компьютер, включающий постоянное запоминающее устройство (ПЗУ), в котором хранятся программы для выполнения процесса управления движением, включая генерирование плана движения, центральный процессор (ЦП) в качестве рабочей схемы, которая выполняет программы, хранящиеся в ПЗУ, чтобы служить устройством 410 управления, и память с произвольным доступом (ОЗУ), которая служит доступным запоминающим устройством.
[0029] В процессе управления движением устройство 410 управления обращается к информации 24 о среде передвижения, сгенерированной устройством 100 генерирования информации о среде передвижения в заданном цикле обработки. Процессор 411 управления движением выполняет процесс управления движением, используя сгенерированную информацию 24 о среде передвижения.
[0030] Далее будет описано устройство 100 генерирования информации о среде передвижения. Устройство 100 генерирования информации о среде передвижения согласно одному или более вариантам осуществления настоящего изобретения не ограничено по своей форме, и его часть может быть оборудована в транспортном средстве или может также применяться в портативном терминальном устройстве, способном обмениваться информацией с бортовым устройством 200, устройством 400 управления движением и/или сервером 300. Примеры оконечного устройства включают такие устройства, как смартфон и КПК (PDA).
[0031] Устройство 100 генерирования информации о среде передвижения включает в себя устройство 10 управления, запоминающее устройство 20 и устройство 30 связи. Устройство 10 управления включает в себя процессор 11, который выполняет процесс генерирования информации 24 о среде передвижения. Процессор 11 представляет собой вычислительное устройство, имеющее функцию обработки информации, заключающуюся в выполнении процесса генерирования информации 24 о среде передвижения.
[0032] Процессор 11 представляет собой компьютер, включающий постоянное запоминающее устройство (ПЗУ), в котором хранятся программы для выполнения процесса генерирования информации 24 о среде передвижения, центральный процессор (ЦП) в качестве рабочей схемы, которая выполняет программы, хранящиеся в ПЗУ, для обслуживания в качестве устройства 10 управления и оперативной памяти (RAM), которая служит доступным запоминающим устройством. Устройство 10 управления согласно одному или более вариантам осуществления настоящего изобретения выполняет каждую функцию посредством взаимодействия программного обеспечения для достижения вышеуказанных функций и вышеописанного аппаратного обеспечения.
[0033] Информация 24 о среде передвижения согласно одному или более вариантам осуществления настоящего изобретения используется в процессе управления движением, включая автоматизированное или автономное вождение.
Информация 24 о среде передвижения согласно одному или более вариантам осуществления настоящего изобретения генерируется (предоставляется/формируется) путем объединения первой информации и второй информации. Первая информация представляет собой информацию, относящуюся к фактической и реальной окружающей среде (среде во время движения), обнаруженной устройством 220 обнаружения транспортного средства. Вторая информация представляет собой информацию о полосах движения, полученную из информации 21 карты. Информация 24 о среде передвижения представляет собой информацию, в которой первая информация и вторая информация редактируются в один информационный элемент и на которую может ссылаться устройство 400 управления движением.
Информация 24 о среде передвижения согласно одному или более вариантам осуществления настоящего изобретения генерируется путем объединения первой информации и второй информации. Процесс объединения для первой информации и второй информации включает в себя процесс соединения, процесс интеграции или процесс изменения (модификации) для первой информации и второй информации.
[0034] Процесс подключения представляет собой процесс подключения информации, касающейся полосы движения, включенной в первую информацию, информации, касающейся области, включая полосу движения, и информации о полосах движения, включенной во вторую информацию, или информации об областях, включая полосы движения (включая информацию карты), так что что непрерывность информации сохраняется.
Процесс интеграции представляет собой процесс сборки/агрегирования/наложения информации, касающейся полосы движения, включенной в первую информацию, информации, относящейся к области, включая полосу движения, и информации о полосах движения, включенной во вторую информацию, или информации, касающейся областей, включая полосы движения (включая информации карты), так что непрерывность информации сохраняется.
Процесс модификации представляет собой процесс изменения содержания первой информации или второй информации или содержания первой информации и второй информации и изменения/модификации любой одной из первой информации и второй информации на основе первой информации или второй информации. В одном или более вариантах осуществления настоящего изобретения первая информация, основанная на информации обнаружения, может быть оценена как информация, отражающая среду реального пространства (информация, представляющая среду передвижения, которая приближена к реальной ситуации), и содержание второй информации может быть модифицировано (изменено) со ссылкой на первую информацию.
В процессе объединения может быть выполнен любой из процесса соединения для первой информации и второй информации, процесса интеграции для первой информации и второй информации и процесса модификации, или комбинации двух или более процессов. Процесс объединения выполняется таким образом, чтобы сохранялась непрерывность информации о полосе движения. Первая информация и вторая информация объединяются таким образом, чтобы положение полосы движения не было смещено, и информация о разметках полосы движения не прерывалась.
[0035] С точки зрения обеспечения непрерывности информации о среде передвижения, сгенерированной путем объединения первой информации и второй информации, процессор 11 объединяет первую информацию и вторую информацию для генерирования информации о среде передвижения, чтобы полоса движения была соединена с целевой полосой информации 21 карты, соответствующей полосе движения. В идеале полоса движения и целевая полоса имеют одинаковую форму, и поэтому ожидается, что эти полосы будут соединены плавно. Связь между полосой движения и целевой полосой может гарантировать непрерывность первой и второй информации. Процессор сравнивает координаты первой информации, включая полосу движения, с координатами информации 21 карты, включая целевую полосу, для вычисления точки соединения между полосой движения и целевой полосой движения. Когда может быть рассчитана точка соединения, полоса движения и целевая полоса соединяются для расчета маршрута движения. Этот маршрут движения используется в качестве маршрута движения, когда контролируемое транспортное средство движется автономно. Маршрут движения представляет собой маршрут, который включает точку соединения полосы движения и целевой полосы.
С точки зрения непрерывности полосы движения и целевой полосы движения первая информация, основанная на информации обнаружения от датчика, и вторая информация, основанная на информации 21 карты высокой четкости, могут быть соответствующим образом объединены. Обращаясь к информации 21 карты, можно получить информацию о среде передвижения и маршрут передвижения, которые отражают реальную ситуацию.
Маршрут движения дальше точки соединения (на стороне назначения) может быть целевой полосой на основе второй информации, основанной на информации 21 карты, которая предварительно подготовлена, и маршрутом движения ближе, чем точка соединения (на стороне рассматриваемого транспортного средства) может быть полосой движения первой информации на основе результата обнаружения от датчика. Используя целевую полосу информации 21 карты с учетом фактических условий движения, можно получить маршрут движения от текущего местоположения рассматриваемого транспортного средства до дальней стороны. Можно получить высокоточный маршрут движения для управления транспортным средством для автономного движения.
[0036] Процессор 11 получает первую информацию и вторую информацию, относящуюся к полосе движения, существующей в положении дальше, чем среда передвижения, которая может быть получена на основе первой информации. Первая информация получается из информации об обнаружении от бортового датчика. Дальность обнаружения (расстояние) бортового датчика конечна, и первая информация о маршруте до пункта назначения может быть не получена. С другой стороны, вторая информация представляет собой предварительно подготовленную информацию карты 21, и можно получить информацию о среде передвижения в позиции, отделенной от рассматриваемого транспортного средства. Процессор 11 получает первую информацию, касающуюся условий движения рядом с рассматриваемым транспортным средством, и вторую информацию, относящуюся к среде передвижения, вдали от рассматриваемого транспортного средства, и объединяет первую информацию и вторую информацию так, чтобы полоса движения и целевая полоса были связаны друг с другом, тем самым, чтобы получить информацию о среде передвижения относительно маршрута движения от ближней стороны к дальней стороне. Полоса движения и целевая полоса соединены друг с другом, и, следовательно, первая информация, основанная на информации обнаружения датчика, и вторая информация, основанная на информации 21 точной карты высокой четкости, могут быть объединены при сохранении непрерывности. Можно получить точный маршрут передвижения со ссылкой на информацию 21 карты также для дальней стороны, придавая важность информации о среде передвижения, которая отражает фактическую ситуацию на ближней стороне. Полученный маршрут передвижения представляет собой маршрут для автономного передвижения рассматриваемого транспортного средства.
[0037] Далее будет описано содержание процессов, выполняемых устройством 10 управления. Устройство 10 управления объединяет первую информацию и вторую информацию для генерирования информации 24 о среде передвижения. Сгенерированная информация 24 о среде передвижения может храниться в запоминающем устройстве 20 или также может храниться в запоминающем устройстве 20 бортового устройства 200, которое доступно.
[0038] Устройство 10 управления выполняет процесс получения первой информации. Первая информация представляет собой информацию, основанную на информации обнаружения от датчика, установленного на рассматриваемом транспортном средстве.
Бортовые датчики включают в себя устройство 220 обнаружения и датчик 260 транспортного средства. Информация обнаружения включает в себя изображения, захваченные камерой 221 устройства 220 обнаружения, которые будут описаны далее, и информацию, полученную из захваченных изображений. Информация обнаружения включает в себя сигналы обнаружения от радарного устройства 222 и информацию, полученную из сигналов обнаружения. Информация обнаружения включает в себя информацию о поведении транспортного средства, обнаруженного датчиком 260 транспортного средства. Информация об обнаружении включает в себя текущую информацию о местоположении. Текущая информация о местоположении может быть обнаружена устройством 223 определения местоположения устройства 220 обнаружения или также может быть обнаружена устройством 231 определения местоположения навигационного устройства 230, что будет описано далее.
[0039] Бортовые датчики включают в себя приемное устройство 224, которое принимает информацию обнаружения, предоставленную внешней системой предоставления информации, такой как интеллектуальная транспортная система (ITS), с использованием устройства 210 связи. Приемное устройство 224 может получать изображения, снятые камерой, установленной на дороге, посредством беспроводной связи малого радиуса действия. Приемное устройство 224 может получать информацию обнаружения (включая снятые изображения) от другого транспортного средства посредством беспроводной связи малого радиуса действия. Информация обнаружения, принятая устройством 224 приема, оборудованным в рассматриваемом транспортном средстве, используется в качестве информации обнаружения в текущем местоположении рассматриваемого транспортного средства, которое движется.
[0040] Устройство 10 управления идентифицирует «полосу движения», которая является полосой движения, которой принадлежит текущее положение рассматриваемого транспортного средства и по которой движется рассматриваемое транспортное средство. Полоса движения может быть идентифицирована на основе текущего положения рассматриваемого транспортного средства, и можно указать положение движения в полосе движения. Положение полосы движения может быть определено на основе координат изображения, захваченного камерой 221, и/или положения транспортного средства, обнаруженного датчиком 260 транспортного средства. Полоса движения может быть указана на основе определения, сделанного навигационным устройством 230.
[0041] Первая информация согласно одному или более вариантам осуществления настоящего изобретения представляет собой информацию, касающуюся окружающей среды движения, включая полосу движения, по которой движется рассматриваемое транспортное средство, причем эта информация основана на информации обнаружения от датчиков (включая устройство 220 обнаружения, транспортное средство датчик 260 и устройство 231 определения положения, установленное в рассматриваемом транспортном средстве. Первая информация представляет собой информацию, касающуюся полосы движения дороги, по которой движется рассматриваемое транспортное средство, и дороги, включая полосу движения. Информация о полосе движения первой информации включает в себя информацию разметки полосы, которая определяет полосу движения. Первая информация представляет собой информацию о полосе движения и включает в себя идентификационную информацию о полосе движения. Первая информация представляет собой информацию о дороге, включая полосу движения, и включает в себя идентификационную информацию дороги, включая полосу движения. В первой информации идентификационная информация полосы движения и идентификационная информация дороги, включая полосу движения, связаны друг с другом. То есть, когда полоса движения указывается идентификационной информацией, может быть получена информация, касающаяся дороги, которой принадлежит полоса движения.
[0042] Устройство 10 управления получает вторую информацию из информации 21 карты, хранящейся в запоминающем устройстве 20. Вторая информация представляет собой информацию о полосах движения. Вторая информация включает в себя информацию для идентификации одной целевой полосы из множества полос дороги. Вторая информация включает в себя информацию о разметках полос для каждой полосы дороги. Информация о разметке полосы для каждой полосы относится к информации о положении, форме или атрибуте разметки полосы. Вторая информация представляет собой часть или всю информацию 21 карты.
[0043] Запоминающее устройство 20 согласно одному или более вариантам осуществления настоящего изобретения хранит информацию 21 карты, информацию 22 полосы движения и информацию 23 регулирования дорожного движения. Информация 21 карты является информацией цифровой карты высокой четкости (карта высокой четкости, динамическая карта). Информация 21 карты согласно одному или более вариантам осуществления настоящего изобретения используется в процессе управления движением, выполняемом устройством 400 управления движением. Информация 21 карты содержит двумерную информацию и/или трехмерную информацию.
[0044] В одном или более вариантах осуществления настоящего изобретения будет описана форма, в которой информация 21 карты хранится в запоминающем устройстве 20 устройства 100 генерирования информации о среде передвижения, но информация 21 карты может храниться в запоминающем устройстве 240 бортового устройства 200, запоминающем устройстве 320 сервера 300, которое может считываться/записываться через устройство 30 связи, или запоминающем устройстве 420 устройства 400 управления движением. Фиг. 1 иллюстрирует множество частей информации карты (21, 241, 321), частей информации полосы движения (22, 242, 322) и частей информации регулирования дорожного движения (23, 243, 323), но по крайней мере один из них может быть сконфигурирован в доступное состояние.
[0045] Когда одна дорога включает в себя множество полос, предоставляется идентификационная информация для идентификации одной целевой полосы из этих полос. Каждая полоса определяется позиционной информацией (значениями координат карты), такой как широта/долгота, и какая полоса (N-я) полоса может быть указана с использованием идентификационной информации. Когда множество полос принадлежит дороге, каждая полоса движения и дорога, к которой принадлежит полоса, связаны друг с другом посредством идентификационной информации. Информация 21 карты имеет идентификационную информацию для указания каждой отдельной полосы и информацию полосы назначения соединения для идентификации полосы назначения соединения каждой полосы.
[0046] «Полоса» в одном или более вариантах осуществления настоящего изобретения представляет собой область, в которой могут передвигаться транспортные средства, существующие вдоль направления движения дороги. Когда дорога имеет множество полос, расположенных параллельно, каждую «полосу» можно идентифицировать по разнице в положении (координатах) вдоль направления ширины дороги. Полоса включает одну или более связей. Связь разделена на полосе узлами, которые представляют собой две конечные точки, разделенные в направлении расширения полосы. Связи, соответствующие полосам, расположенным параллельно на дороге, можно идентифицировать по позициям (координатам) в поперечном направлении дороги и по позициям (координаты) в продольном направлении дороги.
[0047] Информация 21 карты согласно одному или более вариантам осуществления настоящего изобретения включает в себя идентификационную информацию для указания каждой полосы движения и информацию для указания следующей последовательной полосы движения. Информация 21 карты позволяет выполнять процесс считывания устройством 400 управления движением. В процессе автоматизированного или автономного управления движением устройство 400 управления движением может обращаться к информации 21 карты, чтобы таким образом автономно перемещать (вести) транспортное средство по целевому маршруту и оценивать полосу, по которой транспортное средство будет двигаться в будущем.
[0048] Информация 21 карты включает в себя информацию 22 полосы движения. Каждая дорога, включенная в информацию 21 карты, определяется позиционной информацией (значениями координат карты), такой как широта/долгота, а также указывается идентификационной информацией для определения дороги. Информация о полосе 22 включает в себя информацию о типе дороги, информацию об атрибутах дороги, информацию о ширине дорог, информацию о форме дороги (например, радиус кривизны и структуру пересечения), информацию о точках пересечения на дорогах (точки слияния, точки разветвления), информацию о въезде/выезде (информацию о дорогах вверх/вниз), информацию о количестве полос движения, информацию о количестве полос прибывающего движения (полосы движения вверх), информация о количестве полос движения съезда (полосы движения вниз) и информацию о полосах движения (границах) дорог (например, прерывистые линии, сплошные линии, цвет, озеленение, ограждения, типы конструкций, блоки и отображение типов освещения). Эти информационные элементы связаны с идентификационной информацией о дорогах. Информация о полосе 22 также включает в себя информацию о типе полосы (разветвление, слияние, пересечение), информацию об атрибутах полосы (например, полосы правого поворота, полосы левого поворота и прямые полосы), информацию о ширине полос движения, информацию о форме полосы движения (такую как радиусы кривизны и структуры перекрестков), информацию о перекрестках (точки слияния, точки разветвления) на полосах движения, информацию о входящих/исходящих (восходящих/нисходящих) полосах движения, информации о количестве смежных полос, информации о количестве входящих полос, информации о количестве полос движения и информации о разметках (границах) полос движения (например, пунктирные линии, сплошные линии, цвет, посадка, ограждения, типы конструкций, блоки и отображение типов освещения). Эти информационные элементы связаны с идентификационной информацией полос движения.
[0049] Информация 21 карты включает в себя информацию 23 правил дорожного движения. Информация 23 правил дорожного движения представляет правила дорожного движения на маршруте, такие как СТОП, НЕТ ПАРКОВКИ/НЕТ ОСТАНОВКИ, МЕДЛЕННО и ОГРАНИЧЕНИЕ СКОРОСТИ, которым транспортные средства должны следовать во время движения. Информация 23 о правилах дорожного движения включает в себя информацию об одностороннем движении, запрете на въезд, временной остановке, соотношении приоритетов при движении, о том, разрешен ли обгон (разрешено или нет смена полосы на соседнюю полосу), запрете парковки, разрешение на парковку и т.д. Каждое правило определяется для каждой точки (широта, долгота), каждой связи и каждой полосы. Информация 23 регулирования дорожного движения может включать в себя информацию о сигналах светофора, полученную от устройства, установленного на обочине дороги.
[0050] Устройство 10 управления обращается к описанной выше информации 21 карты, хранящейся в запоминающем устройстве 20, для получения второй информации, касающейся полос дороги.
Вторая информация представляет собой любой один или более информационных элементов позиционной информации, такой как значения координат разметок полос, информация для определения форм линий, которые имеют разметки полос, такие как сплошные, прерывистые и желтые линии, а также информация для определения того, какие формы структур дорожных полос имеют разметки полосы движения, такие как бордюры, озеленение и ограждения. К информации о разметке полосы прилагается идентификационная информация о положении каждой полосы (N-я, правая/левая сторона). Это позволяет задавать формы разметок полосы N-й полосы, форму разметки полосы на правой стороне полосы и форму разметки полосы слева от полосы. То есть информация 21 карты включает в себя для каждой полосы движения информацию о комбинации разметок полосы движения, например, разметка полосы на левой стороне представляет собой сплошную линию, а разметка полосы на правой стороне является бордюром. Такая информация сохраняется для каждой полосы как вторая информация.
[0051] Идентификационная информация полосы движения из первой информации и информация идентификации целевой полосы из второй информации, соответствующей полосе движения, могут быть связаны друг с другом. Из идентификационной информации первой информации, касающейся одной полосы движения A, можно выделить полосу движения (целевую полосу) B в информации карты, соответствующей полосе движения A, и вторую информацию о полосе движения (целевой полосе движения) B. Например, устройство 10 управления указывает дорогу, к которой принадлежит полоса движения для транспортного средства, которое будет перемещаться (получает идентификационную информацию дороги) на основе позиционной информации первой информации, дорожного указателя, включенного в захваченное изображение в первой информации, идентификационной информации целевой полосы движения, второй информации, соответствующей полосе движения, и т.п. Устройство 10 управления дополнительно указывает полосу движения, по которой движется рассматриваемое транспортное средство (получает идентификационную информацию полосы движения), из изображения линии движущихся впереди транспортных средств, включенных в захваченное изображение в первой информации. Устройство 10 управления считывает информацию идентификации дороги движения и информацию идентификации полосы движения из информации 22 полосы, хранящейся в запоминающем устройстве 20.
[0052] Устройство 10 управления определяет, является ли дорога движения, к которой принадлежит полоса движения, заданной конкретной дорогой, на основе первой информации. Устройство 10 управления определяет дорогу, которой принадлежит полоса движения, на основе позиционной информации первой информации и обращается к информации 22 полосы, чтобы выделить признаки дороги движения. На основе захваченного изображения в первой информации устройство 10 управления извлекает признаки дороги движения, к которой принадлежит проезжая полоса, из количества и формы разметок полосы, извлеченных из изображения разметок полосы движения, снятых впереди рассматриваемого транспортного средства. На основе захваченного изображения в первой информации устройство 10 управления извлекает признаки дороги движения, которой принадлежит полоса движения, из изображения или подобного изображения линии транспортных средств, снятых впереди рассматриваемого транспортного средства.
[0053] Устройство 10 управления согласно одному или более вариантам осуществления настоящего изобретения ограничивает сценарий/время, в которых выполняется процесс генерирования информации 24 о среде передвижения. Устройство 10 управления определяет, является ли дорога движения заданной конкретной дорогой, на основании признаков дороги движения, полученных на основе первой информации. Когда определено, что дорога движения, которой принадлежит полоса движения, является конкретной дорогой, устройство 10 управления объединяет первую информацию и вторую информацию для генерирования информации 24 о среде передвижения.
[0054] Устройство 10 управления определяет, является ли дорога движения конкретной дорогой, которая удовлетворяет заданному условию, на основе первой информации или второй информации или на основе первой информации и второй информации. Предварительно определяется заданное условие, которое является критерием определения того, является ли дорога конкретной дорогой.
[0055] В одном или более вариантах осуществления настоящего изобретения заданное условие, которое определяет конкретную дорогу, определяется с точки зрения указания «уникальной полосы движения». Примеры определения конкретной дороги будут описаны ниже, хотя и не ограничены особо.
[0056] (1) Конкретная дорога может быть определена как дорога (дорога движения), в которой количество полос, принадлежащих дороге, является заданным.
Чем больше полос относится к одной дороге, тем сложнее указать уникальную полосу. Путем определения конкретной дороги на основе количества полос, принадлежащих одной дороге, можно ограничить ситуацию/сценарий/время, в которых уникальная полоса легко определяется из числа полос, принадлежащих дороге. Количество полос может быть ограниченным числовым значением или может также быть представлено числовым диапазоном, определяемым верхним пределом и/или нижним пределом.
Даже в случае, когда дорога движения включает в себя множество полос, когда количество полос является заданным, может быть выполнено определение, что ситуация/сценарий/время подходят для выполнения процесса генерирования информации 24 о среде передвижения. Устройство 10 управления генерирует информацию 24 о среде передвижения при движении по конкретной дороге, подходящей для генерирования информации 24 о среде передвижения, и поэтому может генерировать информацию 24 о среде передвижения с небольшим отличием от фактической среды.
[0057] Устройство 10 управления использует первую информацию для вычисления количества полос, принадлежащих дороге (дороги движения). На основе захваченного изображения в первой информации устройство 10 управления может вычислить количество полос движения из количества разметок полос движения проезжей части, включенных в захваченное изображение. Количество полос движения может быть вычислено из числа линий других транспортных средств, движущихся впереди по дороге, включенной в захваченное изображение в первой информации. Устройство 10 управления использует вторую информацию для вычисления количества полос, принадлежащих дороге (дороги движения). Вторая информация включает в себя количество полос дороги, которым принадлежит целевая полоса, соответствующая полосе движения. Устройство 10 управления может использовать первую информацию и вторую информацию для вычисления количества полос движения, принадлежащих дороге (дороги движения). Количество полос движения может быть вычислено путем обращения ко второй информации, связанной с дорогой, в информации карты, соответствующей проезжей дороге, которой принадлежит текущее положение первой информации.
[0058] (2) Конкретная дорога может быть определена как дорога, на которой количество полос движения во входящем (исходящем) направлении дороги движения равно одной, и количество полос в исходящем (входящем) направлении дороги - одна. Направление движения по полосе движения может быть идентифицировано с использованием первой информации (отдельно) или первой информации и второй информации. При принадлежности к дороге, на которой количество полос во входящем направлении равно одной, и количество полос в исходящем направлении равно одной, уникальная полоса может быть указана с высокой степенью уверенности. Другими словами, конкретная дорога в этом примере представляет собой дорогу, которая включает в себя одну входящую полосу и одну исходящую полосу.
Когда дорога движения рассматриваемого транспортного средства включает в себя только одну полосу движения в том же направлении движения, можно определить, что ситуация/сценарий/время подходят для выполнения процесса генерирования информации 24 о среде передвижения. Устройство 10 управления генерирует информацию 24 о среде передвижения при движении по конкретной дороге, подходящей для генерирования информации 24 о среде передвижения, и поэтому может генерировать информацию 24 о среде передвижения с небольшим отличием от фактической среды.
[0059] Устройство 10 управления использует первую информацию, чтобы определить, находится ли дорога/полоса движения во входящем (вверх) направлении или исходящем (вниз) направлении, на основе направления движения другого транспортного средства, извлеченного из изменения во времени на захваченном изображении, входящем в первую информацию. Направление движения (входящее или исходящее направление/вверх или вниз) полосы движения можно определить по изменению во времени текущего положения первой информации. Направление движения (входящее или исходящее направление/вверх или вниз) полосы движения можно определить по изменению во времени захваченного изображения в первой информации. Изображение снимается камерой 221. Направление движения (въезд или выезд/направление вверх или вниз) полосы движения можно определить по ускорению от датчика 262 скорости транспортного средства.
На основе захваченного изображения в первой информации устройство 10 управления вычисляет количество полос на основе количества разметок полосы движения дороги движения, включенных в захваченное изображение, и определяет, является ли количество полос во входящем направлении и количество полос движения в исходящем направлении - одной. Устройство 10 управления вычисляет количество полос движения по количеству линий других транспортных средств, движущихся впереди по дороге, включенной в захваченное изображение в первой информации, и определяет, равно ли количество полос для въезда или выезда - одной.
Устройство 10 управления может использовать вторую информацию для определения того, являются ли количество полос движения во входящем направлении дороги движения и количество полос в исходящем направлении дороги движения по одной в обоих случаях. Вторая информация включает в себя количество полос дороги, которым принадлежит целевая полоса, соответствующая полосе движения. Вторая информация включает в себя информацию о том, включена ли целевая полоса, соответствующая полосе движения, в дорогу, на которой количество полос во входящем направлении равно одной, и количество полос в исходящем направлении равно одной.
Устройство 10 управления использует первую информацию и вторую информацию, чтобы определить, равно ли количество полос, принадлежащих дороге (дороги движения), одной. Количество полос движения может быть получено путем обращения ко второй информации, связанной с дорогой, или информации карты, соответствующей проезжей дороге, которой принадлежит текущая позиция первой информации, и может быть выполнено определение того, количество проездных полос - одна.
[0060] (3) Конкретная дорога может быть определена как дорога, на которой количество полос движения во входящем направлении или исходящем направлении от дороги движения равно одной. То есть конкретная дорога представляет собой дорогу, на которой одна полоса движения во входящем направлении или исходящем направлении является односторонней. С помощью вышеописанной схемы направление движения по полосе движения может быть идентифицировано с использованием первой информации (отдельно) или первой информации и второй информации. Когда дорога является односторонней, уникальную полосу движения можно указать с высокой степенью уверенности. При принадлежности к дороге, на которой количество полос во входящем направлении равно одной или количество полос в исходящем направлении равно одной, уникальная полоса может быть указана с высокой степенью уверенности.
Когда дорога движения рассматриваемого транспортного средства представляет собой дорогу, на которой количество полос движения во входящем направлении или исходящем направлении равно одной, можно определить, что ситуация/сценарий/время подходят для выполнения процесса генерирования информации 24 о среде передвижения. Устройство 10 управления может генерировать информацию 24 о среде передвижения при движении по конкретной дороге, подходящей для генерирования информации 24 о среде передвижения, и, следовательно, может генерировать информацию 24 среды движения с небольшим отличием от фактической среды.
[0061] В описанной выше схеме устройство 10 управления использует первую информацию для идентификации того, находится ли дорога/полоса движения во входящем или исходящем направлении. С помощью вышеописанной схемы устройство 10 управления вычисляет количество полос движения, используя первую информацию, и определяет, равно ли количество полос движения во входящем или исходящем направлении. Таким образом, устройство 10 управления определяет, находится ли дорога/полоса движения во входящем или исходящем направлении. Конкретная дорога в этом примере включает одну полосу для въезда или выезда.
С помощью вышеописанной схемы устройство 10 управления может использовать вторую информацию, чтобы определять, равно ли одной количество полос движения во входящем или исходящем направлении дороги движения.
Устройство 10 управления использует первую информацию и вторую информацию, чтобы определить, равно ли одной количество полос, принадлежащих дороге (дороги движения). Количество полос движения может быть получено путем обращения ко второй информации, связанной с дорогой, информации карты, соответствующей проезжей дороге, которой принадлежит текущее положение первой информации, и может быть выполнено определение того, является ли количество проездных полос равным одной.
[0062] (4) Конкретная дорога может быть определена как дорога, на которой количество полос движения изменяется с двух или более до одной. Такая дорога представляет собой дорогу, на которой количество полос на дороге движения равно двум или более в текущем положении, но полосы сливаются в одну полосу в положении на стороне направления движения. Когда количество полос, принадлежащих дороге, равно одной, легче указать уникальную полосу, чем когда количество полос равно двум или более. То есть даже если количество полос на дороге движения равно двум или более в текущем положении рассматриваемого транспортного средства, которое движется, можно ожидать, что в ситуации, в которой количество полос изменится на одну (две или более полосы сливаются в одну полосу) в положении, в котором рассматриваемое транспортное средство будет двигаться в будущем (положение на стороне вниз по потоку в направлении движения), продолжение движения (истечение времени) создает ситуацию, в которой уникальная полоса движения будет легко уточняться в будущем. Даже когда количество полос на дороге движения дороги, которой принадлежит текущая позиция, равно двум или более, можно определить, что ситуация/сценарий/время подходят для выполнения процесса генерирования информации 24 о среде передвижения при условии, что ожидается, что в будущем количество полос на дороге движения увеличится до одной. Устройство 10 управления генерирует информацию 24 о среде передвижения, когда можно ожидать, что транспортное средство будет двигаться по конкретной дороге, подходящей для генерирования информации 24 о среде передвижения, и, следовательно, может генерировать информацию 24 о среде передвижения с небольшим отличием от фактической среды в ближайшем будущем.
Когда определено, что количество полос дороги движения, по которой в настоящее время движется транспортное средство, изменяется с двух или более до одной, можно ожидать, что ситуация/сценарий/время, подходящие для выполнения процесса генерирования информация 24 о среде передвижения, будет получена в ближайшем будущем. Например, такой сценарий представляет собой сценарий, при котором дорога движения на восходящей стороне перекрестка (или в точке слияния) включает две или более полосы, но последовательные полосы дороги движения после проезда через перекресток сливаются в одну полосу дороги. Устройство 10 управления генерирует информацию 24 о среде передвижения, когда ожидается, что транспортное средство будет двигаться по конкретной дороге, подходящей для генерирования информации 24 о среде передвижения, и поэтому можно ожидать, что информация 24 о среде передвижения генерируется с небольшой разницей из реальной среды.
[0063] Устройство 10 управления использует первую информацию для вычисления количества полос, принадлежащих дороге (дороге движения). Когда на основе снятого изображения в первой информации определяется, что количество полос движения в текущем местоположении рассматриваемого транспортного средства равно двум или более, и дополнительно выполняется определение, что количество полос будет равно одной из захваченных изображения области, расположенной впереди рассматриваемого транспортного средства (области, отделенной на заданное расстояние или более в направлении движения от текущего положения рассматриваемого транспортного средства), устройство 10 управления определяет, что рассматриваемое транспортное средство движется по конкретной дороге. Количество полос движения может быть определено на основе количества разметок полосы движения на дороге движения, извлеченных из захваченных изображений области, включая текущее положение и область, расположенную впереди рассматриваемого транспортного средства. Количество полос движения может быть определено на основе количества линий других транспортных средств, движущихся впереди, извлеченных из захваченных изображений области, включая текущее положение, и области, расположенной впереди рассматриваемого транспортного средства.
[0064] Устройство 10 управления обращается ко второй информации для получения количества полос движения, принадлежащих дороге движения, включая текущее положение и количество полос, принадлежащих проезжей части, в области, отделенной заданным расстоянием или более в направлении движения от текущей позиции. Устройство 10 управления может получать информацию о полосе движения, включая текущее положение и соединительные линии, подключенные к полосе движения, на основе текущего положения, обнаруженного устройством 231 определения положения, и информации 22 полосы из информации 21 карты. Из информации о соединительных звеньях, включенных в информацию о полосах движения 22, может быть получено количество полос дороги движения в текущем положении и количество полос дороги движения в точке, отделенной заданным расстоянием или более в направлении движения от текущей позиции. Даже когда количество полос движения, включая текущее положение, равно двум или более, может быть определено, что транспортное средство движется по конкретной дороге, при условии, что полосы, как ожидается, войдут в одну дорогу после прохождения точки, в которой количество полос изменяется (точка пересечения/слияния).
[0065] Устройство 10 управления использует первую информацию и вторую информацию для получения количества полос движения, принадлежащих дороге движения, включая текущее положение, и количество полос, принадлежащих дороге движения, в области, разделенной заданным расстоянием или более в направлении движения от текущей позиции. Количество полос движения может быть вычислено путем обращения к дороге движения, которой принадлежит текущая позиция первой информации, и второй информации относительно дороги в информации карты, соответствующей дороге движения, до которой позиция отделена заданным расстоянием в направлении движения от текущей позиции.
[0066] (5) Конкретная дорога может быть определена как дорога, на которой количество полос дороги движения равно двум или более, а дорожная дорога может быть указана в отношении того, по какой полосе из полос дороги движения движется транспортное средство, на основе рисунков разметок полос, которые определяют полосы, принадлежащие дороги движения. Например, когда две или более полосы, принадлежащие дороге, являются полосами, имеющими разные формы (образцы) разметок полос, полоса движения может быть указана на основе образцов разметок полос. Рисунки разметок полосы движения включают форму разметки правой полосы движения, определяющего полосу движения, форму разметки левой полосы движения или форму комбинации разметок правой и левой полосы движения. Например, если дорога включает в себя уникальную полосу, на которой разметка полосы справа представляет собой желтую сплошную линию, а разметка полосы слева - прерывистую белую линию, можно указать уникальную полосу движения.
Даже в случае, когда количество полос дороги движения, которой принадлежит текущая позиция, составляет две или более, когда транспортное средство движется по дороге, по которой можно указать, по какой полосе движется транспортное средство, на основе рисунков разметок полосы движения можно определить, что ситуация/сценарий/время подходят для выполнения процесса генерирования информации 24 о среде передвижения. Устройство 10 управления генерирует информацию 24 о среде передвижения, когда можно определить, что транспортное средство движется по конкретной дороге, подходящей для генерирования информации 24 о среде передвижения, и, следовательно, может генерировать информацию 24 о среде передвижения с небольшим отличием от фактической среде.
[0067] Устройство 10 управления использует первую информацию для распознавания рисунков разметок полос движения, принадлежащих дороге (дороге движения). На основе захваченного изображения в первой информации устройство 10 управления может указать полосу движения из рисунков разметок полос движения, включенных в захваченное изображение. Образцы разметок полос извлекаются из захваченного изображения. Разметки полосы движения представляют собой ограничивающие линии (сплошные/прерывистые линии), бордюры, насаждения, ограждения, столбики и т.д., проходящие (установленные) в направлении движения. Образцы разметок полосы представлены типом, цветом и формой разметок полос. Устройство управления 10 идентифицирует тип разметок полосы движения с использованием процесса сопоставления с образцом, сравнивая изображение полосы движения разметок, извлеченных из захваченного изображения с рисунком эталонного изображения, которые предварительно сохранены.
[0068] Устройство 10 управления использует вторую информацию для распознавания рисунков разметок полос движения, принадлежащих дороге (дороге движения). Вторая информация включает признаки разметок полос, определяющих полосы движения. Признаки разметок полосы сохраняются как вторая информация для каждой полосы. К особенностям разметок полосы движения относятся форма разметок полосы (сплошная линия, пунктирная линия, цвет) и структура разметок полосы движения (дорожная полоса, такая как бордюрный камень, озеленение, ограждение или дорожный столбик). Функции разметок полосы движения включают в себя функции разметки правой полосы и функции разметки левой полосы для каждой полосы. Образцы разметок полосы движения определяются признаками пары разметок полос справа и слева от полосы движения. Даже когда количество полос движения равно двум или более, уникальная полоса может быть указана с высокой степенью уверенности при условии, что признаки разметок полос движения различны. Таким образом, определяя конкретную дорогу как дорогу, на которой все признаки разметок полос двух или более полос, принадлежащих одной дороге, различны, можно указать полосы движения в состоянии, в котором легко определяется уникальная полоса.
Устройство 10 управления использует первую информацию и вторую информацию для распознавания рисунков разметок полосы движения, принадлежащих дороге движения. Признаки на изображении разметок полосы движения, принадлежащего дороги движения, получены из захваченного изображения, включенного в первую информацию. Рисунки разметок полосы движения распознаются путем обращения ко второй информации, касающейся дороги, из информации карты, соответствующей дороге, которой принадлежит текущая позиция первой информации.
[0069] Образцы разметок полосы движения полосы движения можно распознать путем обращения ко второй информации, связанной с дорогой, или информации карты, соответствующей проезжей дороге, которой принадлежит текущая позиция первой информации, и одна полоса может быть указана на основе образца разметок полосы движения.
Если дорога во входящем направлении или исходящем направлении имеет две или более полос, может оказаться невозможным выделить уникальную полосу, соответствующую полосе движения. Рисунок разметки правой полосы движения и рисунок разметки левой полосы дороги, включающей две или более полосы движения, могут быть разными.
[0070] (6) Конкретная дорога может быть определена как дорога, на которой количество полос во входящем или исходящем направлении дороги движения равно двум или более, и можно указать, по какой полосе из двух или более полос дороги движения движется транспортное средство, на основе рисунков разметок полос, которые определяют полосы движения во входящем направлении или полосы движения в исходящем направлении. Например, когда две или более полосы, принадлежащие дороге во входящем направлении, являются полосами, имеющими разные формы (рисунки) разметок полос, или когда две или более полосы, принадлежащие дороге в исходящем направлении, являются полосами, имеющими разные формы (рисунки) разметок полосы движения, можно указать полосу движения на основе рисунков разметок полос.
Даже в случае, когда количество полос движения во входящем или исходящем направлении дороги движения, которой принадлежит текущая позиция, равно двум или более, когда можно указать, по какой полосе движется транспортное средство, на основе рисунков разметок полосы движения, можно определить, что ситуация/сценарий/время подходят для выполнения процесса генерирования информации 24 о среде передвижения. Устройство 10 управления может генерировать информацию 24 о среде передвижения при движении по конкретной дороге, подходящей для генерирования информации 24 о среде передвижения.
[0071] В описанной выше схеме устройство 10 управления использует первую информацию для идентификации того, находится ли дорога/полоса движения во входящем или исходящем направлении. С помощью вышеописанной схемы устройство 10 управления распознает образцы разметок полос движения, принадлежащих дороге (дороге движения), для каждого из входящего направления и исходящего направления. Образцы разметок полосы движения описаны выше. На основе захваченного изображения в первой информации устройство 10 управления может указать одну полосу движения из числа полос во входящем направлении или исходящем направлении на основе рисунков разметок полос движения дороги движения, включенных в захваченное изображение.
С помощью описанной выше схемы устройство 10 управления может использовать вторую информацию для распознавания рисунков разметок полос движения во входящем направлении или исходящем направлении, принадлежащих дороге (проезжая дорога). Вторая информация в этом примере включает информацию о том, находится ли дорога или каждая полоса движения во входящем или исходящем направлении.
[0072] В описанной выше схеме устройство 10 управления использует первую информацию и вторую информацию для распознавания рисунков разметок полос движения во входящем направлении или исходящем направлении, принадлежащих дороге движения. Образцы разметок полосы движения полосы движения можно распознать путем обращения ко второй информации, связанной с дорогой, или информации карты, соответствующей проезжей дороге, которой принадлежит текущая позиция первой информации, и одна полоса может быть указана на основе образца разметок полосы движения. Вторая информация в этом случае включает информацию о том, находится ли дорога или каждая полоса движения во входящем или исходящем направлении.
Когда рассматриваемое транспортное средство движется по дороге с двумя или более полосами встречного движения, может оказаться невозможным выделить уникальную целевую полосу, соответствующую полосе движения. В таком случае определяется, является ли дорога движения конкретной дорогой, на основе рисунков разметок полос движения во входящем или исходящем направлении.
[0073] (7) Конкретная дорога может быть определена как дорога, на которой количество полос во входящем направлении или количество полос в исходящем направлении дороги движения равно двум или более, а полосы во входящем направлении или полосы в направление выезда определяется заданными характерными разметками полос. Характерные разметки полосы движения включают форму разметок полосы движения (сплошные линии, прерывистые линии, цвет) и структуру разметок полосы движения (полосы движения, такие как бордюры, озеленение, ограждения и дорожные столбики). Одна полоса может быть указана, если на ней есть характерные разметки.
Даже в случае, когда дорога имеет две или более полосы движения в одном направлении движения, когда разметки полос движения являются «заданными разметками полосы движения», можно определить, что ситуация/сценарий/время подходят для выполнения процесса генерирования информации 24 о среде передвижения. Будет обсуждаться случай, в котором, например, среди разметок двух или более полос движения во входящем или исходящем направлении, разметка полосы на наиболее встречной стороне дороги засаживается, а разметка полосы на самой внешней стороне (на противоположной стороне встречной дороги) - бордюрный камень. В этом случае полоса, имеющая полосную разметку насаждения, может быть указана как уникальная полоса на самой встречной стороне дороги. Кроме того, полосу движения, имеющую разметку бордюрным камнем, можно указать как уникальную полосу на самой внешней стороне. Устройство 10 управления генерирует информацию 24 о среде передвижения при движении по конкретной дороге, подходящей для генерирования информации 24 о среде передвижения, и, следовательно, может генерировать информацию 24 о среде передвижения с небольшим отличием от фактической среды.
[0074] В описанной выше схеме устройство 10 управления использует первую информацию для идентификации того, находится ли дорога/полоса движения во входящем или исходящем направлении. С помощью вышеописанной схемы устройство 10 управления распознает образцы разметок полос движения, принадлежащих дороге (дороге движения), для каждого из входящего направления и исходящего направления. Когда разметки полосы движения определены заданными признаками разметки полосы движения, одна полоса движения может быть указана из числа полос движения во входящем или исходящем направлении на основе рисунков разметки полосы движения, извлеченной из захваченного изображения. Устройство 10 управления может определить, является ли или нет захваченные разметки полосы движения «заданными характерными разметками полосы движения», используя процесс сопоставления модели пути сравнения изображения разметок полос движения, извлеченных из захваченного изображения, с рисунком опорного изображения из «заданных рисунков характерной полосы движения», которые сохранены предварительно. Например, имеется случай, когда среди разметок полос двух или более полос движения разметка полосы на самой встречной стороне дороги означает посадки, а разметка полосы на самой внешней стороне (на противоположной стороне от встречной дороги) является бордюрным камнем. В этом случае полоса, имеющая разметку полосы посадки, может быть указана как полоса на самой встречной стороне дороги, а полоса, имеющая разметку полосы бордюрным камнем, может быть указана как полоса на самой внешней стороне.
[0075] В вышеописанной схеме устройство 10 управления использует вторую информацию для распознавания рисунков разметок полос движения во входящем направлении или исходящем направлении, принадлежащих дороге (дороге движения). Вторая информация в этом примере включает информацию о том, находится ли дорога или каждая полоса движения во входящем или исходящем направлении. Вторая информация в этом примере включает в себя информацию, в которой признаки разметок полос движения и идентификационная информация полос связаны друг с другом.
[0076] Устройство 10 управления использует первую информацию и вторую информацию, чтобы определить, являются ли разметки полос движения полос движения во входящем или исходящем направлении, принадлежащих дороге движения, заданными разметками полосы движения. Признаки разметок полосы движения можно распознать, обратившись ко второй информации, связанной с дорогой информации карты, соответствующей дороге, которой принадлежит текущая позиция первой информации, и одна полоса может быть указана на основе разметки полосы движения как «заданная разметка полосы». Вторая информация в этом случае включает в себя информацию, в которой признаки разметок полосы связаны с дорогой или каждой полосой.
Когда рассматриваемое транспортное средство движется по дороге с двумя или более полосами движения, может оказаться невозможным выделить уникальную целевую полосу, соответствующую полосе движения. В таком случае определяется, является ли дорога движения конкретной дорогой, на основе того, являются ли разметки полосы движения заданными разметками полосы движения.
[0077] Примеры вышеописанной конкретной дороги будут описаны со ссылкой на Фиг. 2А и 2В.
RD1, показанный на Фиг. 2A, представляет так называемую дорогу с односторонним движением, которая представляет собой дорогу, на которой количество полос движения во входящем направлении (обозначенном «UP») или исходящем направлении (обозначенном «DOWN» или «DW») равно одной. Полоса LK1 - уникальная полоса дороги RD1. Когда дорога движения представляет собой конкретную дорогу, в которой количество полос равно одной, полоса движения может быть указана с высокой степенью уверенности на основе информации обнаружения. Более того, нет полос, выбранных по ошибке, и поэтому весьма вероятно, что полоса движения конкретной дороги, на которой количество полос равно одной, точно связана с целевой полосой информации 21 карты. Когда информация 24 о среде передвижения генерируется путем объединения первой информации и второй информации, весьма вероятно, что определенная полоса движения и целевая полоса движения точно совпадают во время движения по конкретной дороге. При движении по такой конкретной дороге первая информация и вторая информация могут быть соответствующим образом связаны друг с другом, и, следовательно, можно сгенерировать точную информацию 24 о среде передвижения.
[0078] RD2 представляет собой дорогу, на которой количество полос во входящем направлении и количество полос в исходящем направлении равны по одной. Полоса LKU1 представляет собой полосу во входящем направлении (или исходящем направлении), а полоса LKD1 представляет собой полосу в исходящем направлении (или входящем направлении). Как описано ранее, направление движения по полосе движения может быть определено на основе первой информации и/или второй информации. На дороге, на которой количество полос движения во входящем/исходящем направлении равно одной, количество полос в одном направлении движения ограничено одной, и поэтому полоса движения может быть указана с высокой степенью достоверности. Когда количество полос движения с общим направлением движения равно одной, нет полос, выбранных по ошибке, и поэтому весьма вероятно, что полоса движения и целевая полоса точно связаны друг с другом. Когда информация 24 о среде передвижения генерируется путем объединения первой информации и второй информации, весьма вероятно, что определенная полоса движения и целевая полоса движения точно совпадают во время движения по конкретной дороге. При движении по конкретной дороге первая информация и вторая информация могут быть соответствующим образом связаны друг с другом, и, следовательно, можно сгенерировать точную информацию 24 о среде передвижения.
[0079] RD3 представляет собой дорогу, на которой количество полос во входящем направлении или количество полос в исходящем направлении равно двум. Количество полос движения может быть две и более. Полосы LKU1 и LKU2 представляют собой полосы во входящем направлении (или в исходящем направлении), а полосы LKD1 и LKD2 представляют собой полосы в исходящем направлении (или во входящем направлении). Даже когда может быть идентифицировано направление движения полосы движения, существует две или более полос движения вдоль одного направления, и невозможно идентифицировать уникальную полосу движения только путем определения направления движения.
[0080] Однако, если сосредоточить внимание на комбинации двух разметок полосы, которые определяют полосу движения, комбинации форм полос движения полос LKU1 и LKU2 отличаются от формы дороги RD3. Разметка правой полосы LKU1 представляет собой прерывистую линию, а разметка левой полосы движения LKU1 представляет собой сплошную линию. Правая разметка полосы движения LKU2 засеяна, а левый разметка полосы LKU2 представляет собой пунктирную линию. На такой дороге рисунки комбинации двух разметок полос LKU1 и LKU2 различны, и полоса LKU1 и полоса LKU2 могут быть идентифицированы на основе рисунков разметок полос.
Устройство 10 управления определяет конкретную дорогу как дорогу, которой принадлежат две или более полосы движения с разными рисунками разметки полос. Когда рисунки разметок полос на двух или более полосах различаются, вероятность ошибочного выбора полосы движения мала, и поэтому весьма вероятно, что полоса движения и целевая полоса точно связаны друг с другом. Когда информация 24 о среде передвижения генерируется путем объединения первой информации и второй информации, весьма вероятно, что полоса движения и целевая полоса движения точно совпадают во время движения по конкретной дороге. При движении по конкретной дороге первая информация и вторая информация могут быть соответствующим образом связаны друг с другом, и, следовательно, можно сгенерировать точную информацию 24 о среде передвижения.
[0081] Фиг. 2B иллюстрирует пример, в котором общие рисунки разметок полос включены в некоторые из двух или более полос движения, принадлежащих дороге.
Дорога, показанная на Фиг. 2B, представляет собой дорогу с четырьмя полосами движения с каждой стороны. Дорога во входящем направлении и дорога в исходящем направлении разделены озеленением, и полосы LKU4 и LKD1, существующие по обе стороны полосы движения засеянной полосы, имеют заранее заданный образец полос движения, который является одним и только для каждого из входящего направления и исходящего направления. С другой стороны, в группе UP с четырьмя звеньями во входящем направлении звенья LKU2 и LKU3 имеют разметки полос с прерывистой линией с обеих сторон, а рисунки правого и левого разметок являются общими.
[0082] На такой дороге RD4, даже когда направления движения (UP/DW) могут быть распознаны, в случае, когда текущее положение транспортного средства включает в себя ошибку, полоса движения рассматриваемого транспортного средства V1a, V1b может быть указана неточно. Если полоса движения не может быть точно указана, полоса движения указывается с помощью разметок полосы движения. Тем не менее, звенья LKU2 и LKU3 четырехзвенной группы UP во входящем направлении имеют разметки полос с прерывистой линией с обеих сторон, а рисунки (комбинации) правого и левого разметок полосы являются обычными, а также в четырехзвеньевой группе DW в исходящем направлении, каждая из линий LKD2 и LKD3 имеет разметки полос с обеих сторон. Информация обнаружения, касающаяся разметок полосы движения, расположенных впереди рассматриваемого транспортного средства V1a, и информация обнаружения относительно разметок полосы движения, расположенных впереди рассматриваемого транспортного средства V1b, являются общими, и, следовательно, полоса движения и целевая полоса могут быть не указаны для рассматриваемого транспортного средства V1a, V1b. Таким образом, нецелесообразно определять в качестве конкретной дороги дорогу, в которую включены две или более полосы движения, имеющие общие направления движения, и каждая полоса не может быть идентифицирована по формам разметок полос.
[0083] Однако при фокусировании на заданном характеристическом разметке полосы движения (например, посадка ST) полосы определяются посадочным ST, который является заданной характеристической разметкой полосы движения, и полоса в направлении движения UP представляет собой только полосу LKU4. Когда полосы определяются заранее заданной характерной разметкой полосы движения, одна полоса движения может быть указана на основе характерного разметки полосы движения. В направлении DW движения полоса, имеющая характерную разметку полосы движения (посадка ST) среди двух или более полос движения, является только полосой движения LKD1. Таким образом, когда можно идентифицировать посадочную ST, которая является характерной разметкой полосы движения, и направление движения, можно указать полосу движения. Также, когда полосы движения обозначены характерным разметкой полосы движения, таким как ограждение или бордюрный камень, можно указать одну полосу движения. Когда информация 24 о среде передвижения генерируется путем объединения первой информации и второй информации, весьма вероятно, что определенная полоса движения и целевая полоса движения точно совпадают во время движения по конкретной дороге. При движении по конкретной дороге первая информация и вторая информация могут быть соответствующим образом связаны друг с другом, и, следовательно, можно сгенерировать точную информацию 24 о среде передвижения.
[0084] Устройство 10 управления распознает формы/рисунки разметок полос движения, например, с помощью процесса сопоставления рисунков, на основе изображения, захваченного камерой 221. Устройство 10 управления распознает формы/рисунки разметок полос движения на основе радиолокационного сигнала приема от радиолокационного устройства 222. Информация о формах/рисунках разметок полос для каждой полосы сохраняется в качестве второй информации информации 21 карты, и, следовательно, полоса может быть указана на основе форм/рисунков разметок полос из двух или более полос, которые сужаются вниз по первой информации, такой как позиционная информация.
[0085] Как описано выше, устройство 10 управления генерирует информацию 24 о среде передвижения путем объединения первой информации и второй информации только во время/сценарий, в которых рассматриваемое транспортное средство движется по конкретной дороге. Первая информация представляет собой информацию, касающуюся фактических условий движения и основанную на информации обнаружения от датчика рассматриваемого транспортного средства. Вторая информация представляет собой информацию о дороге или полосе дороги на основе информации 21 карты, которая предварительно сохраняется. Даже когда информация 21 карты является информацией карты высокой четкости, необходимо подтверждать текущее и фактическое положение на дороге, когда транспортное средство управляется для автономного движения. Это связано с тем, что на фактическом маршруте движения есть препятствия, перекрытые дороги, ограничения движения и т.д., и нельзя всегда ожидать, что информация на карте верна. Первая информация, основанная на информации обнаружения, и вторая информация, основанная на информации 21 карты, являются частично общими и частично различными. Устройство 400 управления движением согласно одному или более вариантам осуществления настоящего изобретения обращается к первой информации и второй информации для управления движением транспортного средства.
[0086] Первая информация представляет собой информацию, которая последовательно обнаруживается по мере движения транспортного средства, а вторая информация представляет собой предварительно подготовленную информацию 21 карты высокой четкости. Когда транспортным средством управляют для автономного движения, требуется информация 21 карты высокой четкости. Даже когда информация 21 карты создается подробно, если полоса движения, по которой фактически движется транспортное средство, не может быть точно указана, информация 21 карты для неправильных полос движения будет считана, и выполнение точного автономного движения будет затруднено. Например, когда целевая полоса информации 21 карты, соответствующая полосе движения, указывается на основе позиционной информации, полученной через GPS, когда точность позиционной информации является низкой, может быть указана неверная целевая полоса. Например, точность позиционной информации GPS также варьируется в зависимости от среды приема сигнала, и даже при хороших условиях приема может быть указана неверная целевая полоса из-за систематической ошибки (механической ошибки). В частности, когда к дороге примыкают две или более полосы движения, точная полоса движения не может быть указана даже с ошибкой менее 1 м.
[0087] Устройство 10 управления генерирует информацию 24 о среде передвижения, которая отражает реальную ситуацию. Устройство 10 управления генерирует информацию 24 о среде передвижения путем объединения первой информации, касающейся среды движения, включая полосу движения, на основе информации обнаружения от датчика, и второй информации, касающейся полос движения в информации 21 карты. Устройство 10 управления управляет синхронизацией (ситуацией) выполнения процесса объединения так, чтобы в процессе объединения не возникало несоответствия. Устройство 10 управления выбирает первую информацию и вторую информацию, которые должны быть объединены, на основе информации о полосах движения.
[0088] Далее будет описан процесс объединения для первой информации и второй информации.
Вычисляется разница между первой информацией и второй информацией, и первая информация и вторая информация объединяются на основе разницы. Как первая информация, так и вторая информация включают в себя информацию, касающуюся одной и той же полосы движения, и устройство 10 управления объединяет элементы информации, относящиеся к одной и той же полосе движения. Источником (источником информации) первой информации является информация обнаружения датчика, а источником второй информации является информация 21 карты.
[0089] Процесс объединения включает в себя процесс соединения полосы движения для первой информации и целевой полосы для второй информации (полоса на информации карты, соответствующая полосе движения). Процесс объединения включает в себя процесс изменения второй информации на основе первой информации. В одном или более вариантах осуществления настоящего изобретения информация обнаружения, которая фактически обнаружена, имеет приоритет, а вторая информация модифицируется (изменяется) со связью с первой информацией на основе информации обнаружения. Процесс модификации (изменения) включает в себя процесс сдвига (модификацию или изменение) положения целевой полосы второй информации со ссылкой на положение полосы движения для первой информации.
[0090] Процесс объединения для первой информации и второй информации позволяет интегрировать первую информацию и вторую информацию друг с другом в точном положении, и поэтому информация 24 о среде передвижения может быть сгенерирована с использованием первой информации и второй информации. Даже когда количество данных/объем данных любой из первой информации и второй информации является недостаточным (малым), информация 24 о среде передвижения может быть дополнена и сгенерирована с использованием другого элемента информации. Информация 24 о среде передвижения включает в себя, по меньшей мере, полосу движения (маршрут), по которой движется рассматриваемое транспортное средство. Полоса движения представляет собой полосу, которая отражает реальную среду вокруг рассматриваемого транспортного средства.
[0091] Дальность обнаружения датчиков, включая устройство 220 обнаружения, конечна, и поэтому первая информация является информацией, касающейся дальности (близости) заданного расстояния от рассматриваемого транспортного средства. С другой стороны, вторая информация является информацией, основанной на информации 21 карты, и представляет собой информацию относительно широкого диапазона. В одном или более вариантах осуществления настоящего изобретения первая информация и вторая информация могут быть точно скомбинированы (интегрированы) с правильным соответствием (включая согласование положения), и, следовательно, можно создать план движения от короткого диапазона до большого расстояния для объекта съемки. Подходящий маршрут движения может быть рассчитан с учетом не только ситуации на ближнем расстоянии, но и ситуации на дальнем расстоянии. Можно предотвратить многократное изменение плана движения, и можно выполнить управление плавным движением транспортного средства.
[0092] Процесс объединения (процесс интеграции) включает процесс изменения (модификации) второй информации. Информация 21 карты, касающаяся второй информации, может быть изменена (модифицирована) на основе первой информации, и, следовательно, можно сгенерировать информацию 24 о среде передвижения, которая отражает фактическую среду вокруг рассматриваемого транспортного средства. В одном или более вариантах осуществления настоящего изобретения предполагается, что первая информация, касающаяся фактических условий движения, на основе информации обнаружения от рассматриваемого транспортного средства является «истинной» информацией. Согласно этому предположению, процесс изменения второй информации на основе первой информации может быть выражен как процесс модификации (исправления), который следует за истинной информацией.
[0093] Информация 24 о среде передвижения генерируется, когда рассматриваемое транспортное средство движется по конкретной дороге, и поэтому первая информация и вторая информация могут быть связаны в правильном положении. Другими словами, при движении по конкретной дороге можно снизить риск того, что первая информация (информация обнаружения) и вторая информация (информация 21 карты) неправильно связаны (сопоставлены). В результате можно предотвратить считывание ошибочной полосы движения (информация 21 карты), которая не соответствует полосе движения, для расчета неправильного маршрута движения и генерирования неправильного плана движения. План движения, основанный на неверном маршруте движения, изменяется (корректируется) после выполнения. При изменении плана движения происходит ненужное рулевое управление и ускорение/замедление, поэтому пассажиры испытывают дискомфорт.
[0094] В одном или более вариантах осуществления настоящего изобретения, изменяя (модифицируя) вторую информацию на основе первой информации, основанной на информации обнаружения, может быть выполнено управление перемещением на основе информации 24 о среде передвижения, которая отражает фактически обнаруженную реальную среду. Управление движением, основанное на информации 24 о среде передвижения в соответствии с фактическими условиями, с меньшей вероятностью потребует изменения или корректировки маршрута движения, и, следовательно, можно устранить ненужное рулевое управление и ускорение/замедление. Этим можно добиться сокращения времени в пути до пункта назначения и снижения расхода топлива.
[0095] Устройство 10 управления вычисляет разницу между первой информацией и второй информацией и объединяет первую информацию и вторую информацию на основе разницы. Устройство 10 управления объединяет первую информацию и вторую информацию, когда разница между первой информацией и второй информацией, которые являются общими для цели информации (полоса движения/позиция), составляет первое пороговое значение или более. Когда разница меньше первого порога, определяется, что нет необходимости в объединении. Дополнительно или альтернативно, устройство 10 управления объединяет первую информацию и вторую информацию, когда разница между первой информацией и второй информацией, которые являются общими для целевой информации (полоса движения/позиция), меньше, чем второй порог (> первого порога). Это связано с тем, что, если разница не меньше второго порога, первая информация и вторая информация могут не быть информацией, касающейся одной и той же цели (полосы движения/положения). Пороговые значения для оценки разницы надлежащим образом определяются в соответствии с точностью первой информации и второй информации и атрибутом дороги или полосы движения (например, шоссе или узкой улицы).
[0096] Процесс объединения включает в себя процесс соединения для первой информации и второй информации. Источником первой информации является информация об обнаружении от датчика, и поэтому ее диапазон ограничен способностью обнаружения датчика. Источником второй информации является информация 21 карты, и поэтому ее диапазон не ограничен. В автономном передвижении информация о связях на пункт назначения обязательна. Соединяя первую информацию и вторую информацию, можно получить информацию 24 о среде передвижения в диапазоне, выходящем за пределы диапазона обнаружения датчика.
[0097] Процесс объединения включает в себя процесс интеграции или процесс наложения первой информации и второй информации. Первая информация представляет собой информацию в реальном пространстве, когда рассматриваемое транспортное средство движется. Источником (источником информации) первой информации является информация обнаружения от датчика, и поэтому можно ожидать, что первая информация отражает реальную ситуацию больше, чем информация 21 карты. Источником второй информации является информация 21 карты, в которой части информации об измерениях сопоставляются на основе информации о прошлых измерениях, и, следовательно, вторая информация не отражает изменения ситуации из-за ориентации движущегося транспортного средства и временного изменение маршрута (например, из-за наличия препятствия или конструкции). Для плавного вождения при автономном движении лучше учитывать влияние положения рассматриваемого транспортного средства, и, возможно, придется изменить план вождения, чтобы перемещать рассматриваемое транспортное средство по измененному маршруту даже для временного изменения. Интегрируя первую информацию и вторую информацию, можно выполнять автоматическое или автономное управление движением с учетом как информации 21 карты, так и информации о реальном пространстве, обнаруженной датчиком.
[0098] Если условие обнаружения является идеальным и ситуация рассматриваемого транспортного средства является примерной (моделью), разница между первой информацией и второй информацией мала (например, меньше первого порога), и автоматическое или автономное управление вождением выполняется должным образом на основе первой информации и второй информации. Однако такая ситуация встречается редко, и поэтому первая информация и вторая информация связываются друг с другом для генерирования информации 24 о среде передвижения, в которой первая информация и вторая информация объединены. Хотя это особо не ограничивается, когда разница между первой информацией и второй информацией не меньше, чем второй порог, который больше, чем первый порог, первая информация и вторая информация могут быть объединены для генерирования информации 24 о среде передвижения. Когда разница между первой информацией и второй информацией не меньше, чем второй порог, процесс объединения, который включает в себя любой из процессов соединения, интеграции и наложения, выполняется для генерирования новой информации 24 о среде передвижения. Созданная информация 24 о среде передвижения сохраняется в запоминающем устройстве 20. Информация 24 о среде передвижения может быть сохранена после наложения на информацию 21 карты. Информация 24 о среде передвижения используется в процессе автоматического или автономного управления движением, выполняемого устройством 400 управления движением.
[0099] Для выполнения высокоуровневого автоматизированного или автономного вождения, при котором транспортное средство автономно движется по маршруту, не требуя участия человека, необходимо точно распознавать полосу движения в реальном пространстве, в котором в настоящее время движется транспортное средство, и точно распознавать полосу движения на координатах информации 21 карты, которая используется в качестве эталона. Автоматическое или автономное управление вождением основано на процессах распознавания, определения и эксплуатации. Точность процесса распознавания влияет на точность автоматического или автономного управления движением. В процессе распознавания точность повышается за счет точного распознавания фактического состояния (точности информации обнаружения) и точного указания информации (информации карты, информации связи), на которую следует ссылаться.
[0100] Устройство 10 управления обращается к информации 21 карты, чтобы указать целевую полосу движения, соответствующую полосе движения, на основе первой информации. Устройство 10 управления соединяет полосу движения и целевую полосу из информации 21 карты, соответствующую полосе движения, на основе разницы в положении между первой информацией и второй информацией. Устройство 10 управления вычисляет разницу между первой информацией, которая представляет собой информацию о местоположении полосы движения, и второй информацией, которая представляет собой информацию о местоположении целевой полосы из информации 21 карты, и генерирует информацию 24 о среде передвижения посредством соединение целевой полосы движения, в которой позиционное отличие от полосы движения меньше порога идентификации для определения полос движения, с полосой движения.
[0101] Схема процесса соединения для полосы движения и целевой полосы будет описана со ссылкой на Фиг. 3A и 3B.
Верхняя схема (3а) на Фиг. 3A иллюстрирует полосу L1 движения, по которой движется рассматриваемое транспортное средство V1. Полоса L1 движения определяется устройством 10 управления на основе информации обнаружения от бортового устройства 200 рассматриваемого транспортного средства V1. Устройство 10 управления распознает, что полоса L1 движения для проезда является полосой движения, которая определяется разметкой LEL полосы движения сплошной линией с левой стороны и разметкой LEM полосы движения пунктирной линией с правой стороны. Этот процесс распознавания может выполняться устройством 410 управления устройства 400 управления движением.
[0102] Нижняя схема (3b) на Фиг. 3A иллюстрирует целевую полосу LM в информации 21 карты, соответствующей полосе L1 движения. Фиг. 3A (3b) показаны разметки полосы движения целевой полосы движения, наложенные на разметки полосы L1 движения, показанные на схеме (3a). Устройство 10 управления координатно преобразует информацию о местоположении полосы L1 движения на основе информации обнаружения и информации о местоположении целевой полосы LM информации карты в общие координаты для вычисления разницы. На Фиг. 3A (3b) разметки полос (вторая информация) информации 21 карты указаны относительно более тонкими линиями, чем разметки полос (первая информация) на основе информации обнаружения. Устройство 10 управления обращается к информации 21 карты, чтобы распознать, что целевая полоса LM рассматриваемого транспортного средства V1 является полосой движения, которая определяется разметкой полосы LML с левой стороны и разметкой полосы LMM с правой стороны.
[0103] Как показано на схеме (3c) на Фиг. 3B, расстояние d смещения возникает по ширине дороги (направление Y на чертеже) между разметками LEM и LEL полосы L1 движения на основе информации обнаружения и разметками LMM и LML полосы движения целевой полосы LM информации 21 карты. Дорожная полоса L1 и целевая полоса LM соединяются для объединения первой информации и второй информации, так что расстояние d становится равным нулю. Как показано на схеме (3d) на Фиг. 3B, устройство 10 управления смещает разметки LMR, LMM и LML полосы движения целевой полосы LM вдоль направления +X на расстояние, соответствующее расстоянию d. Устройство 10 управления генерирует информацию 24 о среде передвижения, чтобы включать в себя вторую информацию, таким образом измененную, и сохраняет информацию 24 о среде передвижения в устройстве 20 хранения.
[0104] Фиг. 4 представляет набор схем для описания несовпадения между первой информацией и второй информацией на пересечении. Схема (4a) на чертеже представляет полосу L1 движения, которая распознается на основе информации обнаружения. Чтобы распознать состояние верхней схемы (4a) с Фиг. 4, может упоминаться не только информация обнаружения, но также информация 21 карты. Схема (4b) представляет собой схему, на которой разметки полос целевой дороги, включающей в себя целевую полосу LM, соответствующую полосе L1 движения в информации 21 карты, накладываются на разметки полосы L1 движения, показанной на схеме (a). Как показано на схеме (4b), расстояние d смещения возникает по ширине дороги (направление X на чертеже) между разметками LEM и LEL полосы L1 движения на основе информации обнаружения и разметок LMM и LML полосы движения целевая полоса LM информации 21 карты. В этом примере сфокусировано смещение в поперечном положении полосы движения (смещение в направлении X), но смещение положения в направлении движения (смещение в направлении Y), такое как положение перекрестка в движении направление, также может быть сфокусированным. Как проиллюстрировано на схеме (4c) на чертеже, устройство 10 управления сдвигает разметки LMR, LMM и LML целевой полосы движения, которые принадлежат одной и той же дороге, вдоль направления +X на расстояние, соответствующее расстоянию d, и соединяет полосу движения и целевую полосу. Устройство 10 управления объединяет вторую информацию, положения которой изменяются, и первую информацию для генерирования информации 24 о среде передвижения. Сгенерированная информация 24 о среде передвижения сохраняется в запоминающем устройстве 20.
[0105] Как описано выше, устройство 10 управления выполняет процесс генерирования информации 24 о среде передвижения только тогда, когда дорога, включая полосу движения, по которой в настоящее время движется рассматриваемое транспортное средство, является конкретной дорогой. Когда рассматриваемое транспортное средство движется по конкретной дороге, положение целевой полосы второй информации смещается, и полоса движения и целевая полоса движения соединяются для объединения первой информации и второй информации. Устройство 10 управления указывает целевую полосу движения при движении по конкретной дороге, вычисляет содержание (диапазон, значение, направление), которое необходимо изменить, и генерирует информацию 24 о среде передвижения, в которой целевая полоса соединяется с полосой движения. Путем управления (ограничения) времени или сцены выполнения процесса генерирования информации 24 о среде передвижения вторая информация изменяется на основе первой информации, источником которой является информация обнаружения, и первая информация и вторая информация объединяются; поэтому информация 24 о среде передвижения может быть сгенерирована со ссылкой на фактическую ситуацию.
[0106] В схеме объединения первой информации и второй информации устройство 10 управления объединяет первую информацию первой области, включая полосу движения, и вторую информацию второй области, включая целевую полосу движения, так что полоса движения и целевая полоса движения включены в информацию 21 карты, соответствующую полосе движения. Дополнительно или альтернативно, устройство 10 управления может соединять область, включающую полосу движения, и область, включающую целевую полосу движения. На основе разницы в положении между первой информацией и второй информацией устройство 10 управления объединяет первую информацию и вторую информацию так, чтобы соединялись первая область, включающая полосу движения, и вторая область информации 21 карты, включающая целевую полосу.
[0107] Когда определяется, что целевая полоса, соответствующая полосе движения рассматриваемого транспортного средства, принадлежит конкретной дороге, то есть когда определяется, что рассматриваемое транспортное средство движется по конкретной дороге, условие соответствия, которое связывает полосу движения и целевую полосу друг с другом, ослабляется. Следующие схемы, хотя и не ограничиваются особым образом, возможны для ослабления условия согласования. (1) Порог расстояния для оценки отношения соответствия между первой информацией и второй информацией может быть изменен так, чтобы первая информация и вторая информация были легко связаны друг с другом. (2) Порог в процессе распознавания разметок полосы движения может быть изменен на порог, который позволяет легко обнаруживать разметки полосы движения. (3) Пороговое значение для оценки точности позиционной информации, полученной от GPS, может быть изменено на порог, который позволяет легко принять позиционную информацию. Например, когда порог представляет собой количество спутников, которые могут принимать сигналы среди множества спутников GPS, количество спутников устанавливается на небольшое значение. Например, в отношении условия, что «когда количество спутников, которые могут принимать сигналы, равно 5 или менее, информация о местоположении не используется», это условие изменяется на условие, что «при движении по конкретной дороге, когда количество спутников, которые могут принимать сигналы, составляет 4 или менее, информация о местоположении не используется». (4) Дополнительно или альтернативно, относительно условия, что «никакой процесс сопоставления не выполняется в среде, в которой точность информации обнаружения может быть низкой», например, относительно условия, что «никакой процесс сопоставления не выполняется в среде, например, ночь, дождливая погода или снег», условие изменяется на условие, что «при движении по конкретной дороге процесс согласования выполняется даже в таких условиях, как ночь, дождливая погода или снег». Когда рассматриваемое транспортное средство движется по конкретной дороге, условие, касающееся генерирования информации о среде передвижения, ослабляется. Посредством этой операции в условиях движения, в которых рассматриваемое транспортное средство движется по конкретной дороге и менее вероятны ошибки согласования полос, пороговое значение соответствия полосам движения может быть ослаблено, чтобы уменьшить вычислительную нагрузку и обеспечить выполнение плавной обработки.
[0108] В одном или более вариантах осуществления настоящего изобретения дорога, имеющая две или более полосы движения, общие в виде разметок полос, определяется как не конкретная дорога. Благодаря этому определению, в случае, когда рассматриваемое транспортное средство движется по конкретной дороге, даже когда возникает ошибка сопоставления полосы движения из-за определения, основанного только на текущем положении, целевая полоса может быть указана с помощью форм разметки дорожек каждой полосы и взаимосвязь (включая взаимное расположение) между первой информацией и второй информацией (информацией 21 карты) могут быть точно связаны.
В частности, что касается дорог, каждая из которых имеет две или более полосы движения, общие в направлении движения, дорога, имеющая две или более полосы движения, общие в виде разметок полос движения, не определяется как конкретная дорога. Посредством этого определения, даже в среде, в которой вероятно возникновение ошибки сопоставления полосы движения, целевая полоса может быть указана с помощью форм разметок полосы движения каждой полосы, и может быть сгенерирована соответствующая информация 24 о среде передвижения.
[0109] Устройство 10 управления вычисляет разницу между первой информацией и второй информацией и объединяет первую информацию и вторую информацию на основе вычисленной разности. Разница между первой информацией и второй информацией включает в себя разницу в положении между полосой движения, по которой движется рассматриваемое транспортное средство, и целевой полосой движения. Первая информация представляет собой информацию о фактическом пространстве, в котором движется рассматриваемое транспортное средство, а вторая информация представляет собой информацию о виртуальном (идеальном) пространстве, определенном в информации 21 карты. Разница между первой информацией и второй информацией заключается в несовпадении состояния реального пространства с идеальным состоянием, определяемым информацией 21 карты. Информация 21 карты изменяется на основе разницы для объединения первой информации и второй информации, и, следовательно, может быть сгенерирована информация 24 о среде передвижения, которая отражает состояние реального пространства. Дополнительно или альтернативно, вторая информация может быть изменена так, чтобы вторая информация имела то же значение, что и первая информация, и первая информация и вторая информация могли быть объединены. Вторая информация модифицируется, чтобы соответствовать первой информации. То есть вторая информация изменяется, чтобы быть идентичной первой информации. Это позволяет получить информацию 24 о среде передвижения, чтобы придать значение фактической информации обнаружения.
[0110] Схема схемы генерирования информации 24 о среде передвижения будет описана со ссылкой на Фиг. 5A - 5С. На этих чертежах, чтобы описать схему объединения первой информации и второй информации, подробные полосы не показаны для простоты. На этих чертежах коэффициент уменьшения информации 21 карты и т.п. также отдает приоритет удобству описания.
Фиг. 5A иллюстрирует пример информации 21 карты. Фиг. 5B иллюстрирует информацию 21 карты, включая текущее положение (V1b) рассматриваемого транспортного средства V1b и полосу L1 движения, на основе первой информации, полученной из информации обнаружения. Диапазон, в котором может быть получена первая информация, основанная на информации обнаружения, проиллюстрирован как область DR1. Диапазон области DR1 различается в зависимости от точности устройства 220 обнаружения и т.п. Также проиллюстрирована целевая полоса LM, соответствующая полосе L1 движения. Когда определение выполняется на основе положений, полоса L1 движения и целевая полоса LM являются полосами движения, которые являются относительно ближайшими по расстоянию, или полосами движения, расстояние между которыми меньше заданного значения. На чертеже показана разница расстояний d1 между полосой L1 движения и целевой полосой движения LM. Устройство 10 управления сравнивает первую информацию на основе устройства 220 обнаружения и/или устройства 231 определения местоположения, оборудованного в рассматриваемом транспортном средстве V1b, со второй информацией, касающейся полос движения, сохраненной в информации 21 карты, и вычисляет разность расстояний d1.
[0111] Хотя это особо не ограничивается, устройство 10 управления определяет, является ли полоса L1 движения (или целевая полоса LM) полосой движения, которая принадлежит конкретной дороге, на основе первой информации или второй информации или на основе первой информации и второй информации. Когда определяется, что полоса L1 движения (или целевая полоса LM) принадлежит конкретной дороге, устройство 10 управления переключает одну или обе из полосы L1 движения и целевой полосы LM в соответствии с разницей расстояний d1 и соединяет эти полосы. Устройство 10 управления объединяет первую информацию и вторую информацию на основе разницы d1 и первой информации, так что целевая полоса соединяется с полосой движения. В одном или более вариантах осуществления настоящего изобретения предполагается, что первая информация, основанная на информации обнаружения, является истинной информацией, а вторая информация сдвигается (перемещается) на основе первой информации для выравнивания и объединения первой информации и второй информации. Как показано на Фиг. 5C, информация 21 карты второй информации сдвигается в направлениях координат XY на заданную величину на основе ранее вычисленной разности d1, так что целевая полоса LM соединяется с полосой L1 движения, по которой движется рассматриваемое транспортное средство V1b. Этот процесс позволяет сгенерировать информацию 24 о среде передвижения, в которой целевая полоса LM информации 21 карты соединена с полосой L1 движения. Может быть сдвинута не только полоса движения, но также заданная область DR2, включая полосу движения.
[0112] Устройство 10 управления изменяет информацию разметки полосы движения целевой полосы при генерировании информации 24 о среде передвижения. Информация о разметке полосы включена во вторую информацию. Как описано ранее, информация о разметках полосы движения представляет собой информацию о положениях, формах или атрибутах разметок полосы движения. Вторая информация включает идентификационную информацию с правой/левой стороны каждой полосы движения и представлена позиционной информацией, такой как значения координат разметок полос, информацию для определения форм линий, которые имеют разметки полос, например, сплошные линии, прерывистые линии и желтые линии, и/или информацию для определения того, какие формы структур дорожных полос имеют разметки полосы движения, такие как бордюры, насаждения, ограждения и дорожные столбики. Когда полоса движения принадлежит конкретной дороге, то есть когда рассматриваемое транспортное средство движется по конкретной дороге, на которой менее вероятно возникновение ошибок сопоставления с информацией 21 карты, информация обнаружения в полосе движения отражается во второй информации.
В одном или более вариантах осуществления настоящего изобретения, когда определяется, что дорога движения является конкретной дорогой, информация разметки полосы движения, включенная во вторую информацию целевой полосы движения, изменяется на основе первой информации. Информация об обнаружении, касающаяся разметок полосы движения, которая фактически получается, когда рассматриваемое транспортное средство движется, отражается в информации 21 карты. Даже в случае изменения разметок полосы движения или других подобных случаях информация 21 карты может обновляться в реальном времени.
[0113] Процесс генерирования информации 24 о среде передвижения может выполняться на основе первой информации, которая получена во время движения по полосе движения в прошлые моменты времени и накапливается как история движения. Когда определено, что полоса движения принадлежит конкретной дороге, устройство 10 управления может объединить первую информацию и вторую информацию для генерирования информации 24 о среде передвижения на основе истории движения из историй движения, связанных с дорогой, по которой транспортное средство проезжает заданное количество раз или более. История передвижений включает в себя первую информацию, основанную на информации обнаружения, сохраненной в связи с идентификатором полосы движения. Информация 24 о среде передвижения генерируется на основе репрезентативного значения множества первых информационных элементов. Репрезентативное значение может быть любым из среднего значения, значения отклонения, среднего значения и значения, которое чаще всего появляется в информации обнаружения. На информацию об обнаружении может влиять окружающая среда, такая как погода (дождь, снегопад) во время передвижения, поверхность дороги, время дня (вечернее солнце, сумерки, фары других транспортных средств) и местоположение (огни, неоновые вывески). Когда количество передвижений по заданной полосе движения равно заданному количеству раз или более и количество прошлых записей движения велико, устройство 10 управления использует первую информацию на основе информации обнаружения, обнаруженной во время движения в прошлом раз. Это позволяет генерировать информацию 24 о среде передвижения, устраняя при этом влияние окружающей среды. Историческая информация, включающая количество передвижений по полосе движения, может быть включена в информацию обнаружения или также может быть получена из навигационного устройства 230.
[0114] Процесс генерирования информации 24 о среде передвижения может выполняться на основе первой информации, полученной, когда другие транспортные средства движутся по полосе движения. Когда определяется, что полоса движения является полосой движения, которая принадлежит конкретной дороге, устройство 10 управления генерирует информацию 24 о среде передвижения на основе первой информации о других транспортных средствах, накопленной на сервере 300 для каждой полосы движения. Устройство 10 управления обращается к информации, накопленной на сервере 300 через устройство 30 связи. Первая информация, накопленная на сервере 300, включает в себя первую информацию, основанную на информации обнаружения, полученной устройствами обнаружения 220, установленными во множестве других транспортных средств, причем первая информация собирается и накапливается на внешнем сервере посредством связи, так что может происходить обращение к первой информации. Устройство 10 управления обращается к накопленной первой информации, для которой накопленное количество первой информации от других транспортных средств составляет заданное количество или более, и выполняет процесс объединения со второй информацией на основе репрезентативного значения первой сохраненной информации для каждой полосы движения. Когда количество передвижений других транспортных средств равно заданному количеству раз или более, то есть когда накопленное количество сохраненной первой информации равно заданному количеству или более, а количество прошлых записей о передвижениях велико, устройство управления 10 может использовать первую информацию, основанную на информации обнаружения, которая была обнаружена во время движения других транспортных средств, тем самым генерируя информацию 24 о среде передвижения, устраняя при этом влияние среды. Историческая информация, включающая количество передвижений по полосе движения, может быть включена в информацию обнаружения или также может быть получена из навигационного устройства 230. Предпочтительно, сервер 300 хранит накопленную информацию для каждого из типов транспортных средств других транспортных средств.
[0115] Процедура обработки, выполняемая системой 1 управления движением согласно одному или более вариантам осуществления настоящего изобретения, будет описана со ссылкой на блок-схему с Фиг. 6. Что касается содержания процесса на каждом этапе, приведенное выше описание будет заимствовано здесь, и в основном будет описана последовательность операций.
[0116] Сначала на этапе S1 процессор 11 получает информацию обнаружения от транспортного средства, которое является целью управления. Информация обнаружения включает в себя изображение, захваченное камерой 221, информацию измерений от радарного устройства 222, информацию о местоположении от устройства 223 обнаружения положения или результаты обнаружения на основе этих элементов информации. Информация обнаружения включает в себя выходную информацию от датчика 260 транспортного средства. Информация обнаружения включает в себя информацию, касающуюся вождения транспортного средства, такую как направление движения, скорость транспортного средства, ускорение, величина торможения, величина рулевого управления, скорость рулевого управления и ускорение рулевого управления, информацию о признаках транспортного средства и информацию о характеристиках транспортного средства. Информация об обнаружении включает в себя положение полосы движения, по которой движется транспортное средство, положение разметок полосы движения, формы разметок полосы движения, наличие или отсутствие объекта вокруг рассматриваемого транспортного средства, атрибут объекта (неподвижный объект или движущийся объект), положение объекта, скорость/ускорение объекта и направление движения объекта. Информация об обнаружении может быть получена от бортового устройства 200, которое включает в себя устройство 220 обнаружения, навигационное устройство 230 и датчик 260 транспортного средства.
[0117] На этапе S2 процессор 11 вычисляет текущее положение рассматриваемого транспортного средства, которое движется, на основе информации обнаружения. Текущее положение определяется на основе информации обнаружения, включая сигналы приема GPS и информацию одометра.
[0118] На этапе S3 процессор 11 получает первую информацию, касающуюся окружающей среды движения, включая полосу движения, по которой движется рассматриваемое транспортное средство, на основе информации обнаружения.
[0119] На этапе S4 процессор 11 определяет полосу движения, по которой движется рассматриваемое транспортное средство, на основе изменения во времени текущего положения рассматриваемого транспортного средства. Полоса движения может быть указана путем нанесения на график текущего положения или также может быть указана на основе текущего положения и информации, извлеченной из изображения, захваченного камерой 221. Например, дорога для проезда может быть указана на основе текстовой информации, такой как руководство по дороге.
[0120] На этапе S5 процессор 11 обращается к информации 21 карты, хранящейся в запоминающем устройстве 20, чтобы получить вторую информацию, касающуюся полос дороги. Вторая информация, которую необходимо получить, предпочтительно, но не ограничивается, информацией, касающейся полосы движения.
[0121] На этапе S6 процессор 11 определяет, является ли дорога движения, которой принадлежит полоса движения, конкретной дорогой. Устройство 10 управления сохраняет определение конкретной дороги. На основе полученной первой информации процессор 11 определяет, является ли дорога, к которой принадлежит полоса движения, конкретной дорогой. На основе полученной второй информации процессор 11 определяет, является ли дорога движения, к которой принадлежит полоса движения, конкретной дорогой. Процессор 11 обращается к информации 21 карты, чтобы выделить целевую полосу движения, соответствующую полосе движения. Целевая полоса определена в информации 21 карты. Процессор 11 определяет, принадлежит ли целевая полоса конкретной дороге, на основе информации о полосах движения, связанных с целевой полосой движения. Целевая полоса и полоса движения являются одной и той же полосой движения, и поэтому, когда целевая полоса принадлежит конкретной дороге, полоса движения также принадлежит конкретной дороге.
[0122] Когда дорога для движения, к которой принадлежит полоса движения, не является конкретной дорогой, процесс генерирования информации 24 о среде передвижения не выполняется. Это связано с тем, что при движении по дороге, отличной от конкретной дороги, существует вероятность того, что первая информация о полосе движения и вторая информация о целевой полосе, соответствующей полосе движения, не могут быть точно согласованы.
[0123] На этапе S7 процессор 11 генерирует информацию 24 о среде передвижения. Процессор 11 объединяет первую информацию и вторую информацию для генерирования информации 24 о среде передвижения.
[0124] Процесс генерирования информации 24 о среде передвижения будет описан со ссылкой на блок-схему с Фиг. 7.
На этапе S101 процессор 11 получает первую информацию. Этот процесс соответствует этапу S3 с Фиг. 6.
[0125] На этапе S102 процессор 11 получает вторую информацию, касающуюся целевой полосы движения, соответствующей полосе движения.
[0126] На этапе S103 процессор 11 преобразует разметки полосы движения в общие координаты. На этапе S104 процессор 11 сопоставляет полосу движения и целевую полосу движения по общим координатам.
[0127] На этапе S105 процессор 11 подтверждает, что процесс согласования между полосой движения и целевой полосой движения завершен. Когда расстояние между полосой движения и целевой полосой движения меньше заданного значения, определяется, что согласование было завершено. Согласование между полосой движения и целевой полосой движения может быть выполнено путем сравнения информации о положении полосы движения, сравнения идентификационных номеров полос, сравнения идентификационных номеров или положений звеньев или узлов, включенных в полосы движения, или другого подходящего сравнения. Точка, в которой сравниваются позиции, может быть позицией связи, определенной во второй информации целевой полосы, или позицией узла, определяющего связь. Количество точек, в которых сравниваются позиции, может составлять один, а также может быть два или более. Процессы S101 и последующих шагов повторяются до тех пор, пока не завершится процесс согласования между полосой движения и целевой полосой движения.
[0128] На этапе S106 процессор 11 сравнивает первую информацию со второй информацией и вычисляет разницу. В частности, расстояние между полосой движения и целевой полосой движения вычисляется как разница между первой информацией и второй информацией.
[0129] На этапе S107 процессор 11 определяет, является ли разница в положении между полосой движения и целевой полосой движения в общих координатах предварительно определенным значением или более. Предварительно определенное значение представляет собой значение, определенное в соответствии с величиной рассогласования между первой информацией и второй информацией (информацией 21 карты). Когда обнаруживается разница в значении, превышающем предварительно определенное значение, вторая информация (информация 21 карты) изменяется в процессе объединения. С другой стороны, когда разница меньше заданного значения, процесс возвращается к этапу S101, который должен быть выполнен. Напротив, когда разница меньше предварительно определенного значения, информация о среде передвижения может не обновляться. Когда разница составляет предварительно определенное значение или более, делается определение, что процесс объединения необходим, в то время как, когда разница меньше, чем заданное значение, делается определение, что процесс объединения не нужен.
В другой схеме оценки разницы, когда обнаруживается большая разница в предварительно определенном значении или более, степень достоверности разницы является низкой, так что процесс может вернуться к этапу S101, который будет выполняться без выполнения процесса наложения. С другой стороны, когда разница меньше, чем предварительно определенное значение, вторая информация (информация 21 карты) может быть изменена в процессе объединения, исходя из предположения, что разница может быть величиной рассогласования между первой информацией и второй информацией.
Дополнительно или альтернативно, в схеме оценки разницы, когда разница находится в пределах заданного диапазона значений, могут выполняться процессы этапа S108 и последующих этапов. Когда величина рассогласования между первой информацией и второй информацией имеет тенденцию попадать в пределы заданного диапазона значений в результате анализа накопленных данных, заданный диапазон значений может быть определен на основе диапазона значений дисперсии величины рассогласования.
[0130] На этапе S108 процессор 11 определяет, является ли дорога движения, которой принадлежит полоса движения, конкретной дорогой. Вышеописанное одно или более определений могут быть приняты в качестве определения конкретной дороги. Процессор 11 ограничивает время/состояние, в котором первая информация и вторая информация объединяются для генерирования информации 24 среды передвижения. Процессор 11 генерирует информацию 24 о среде передвижения только тогда, когда рассматриваемое транспортное средство движется по конкретной дороге. Процессор 11 определяет, является ли дорога, к которой принадлежит эта полоса движения, конкретной дорогой. Когда рассматриваемое транспортное средство движется по конкретной дороге, выполняется следующий процесс генерирования информации 24 среды движения.
[0131] На этапе S109 процессор 11 изменяет (модифицирует) положение целевой полосы второй информации в соответствии с разницей.
[0132] На этапе S110 процессор 11 соединяет конец полосы движения и конец целевой полосы и объединяет первую информацию и вторую информацию для получения информации 24 о среде передвижения.
[0133] На этапе S111 процессор 11 записывает информацию 24 о среде передвижения в запоминающее устройство 20. Информация 24 о среде передвижения может быть наложена на информацию 21 карты.
[0134] Процесс возвращается к соответствующему процессу сохранения на этапе S8 с Фиг. 6. На этапе S8 процессор 11 сохраняет новую информацию 24 о среде передвижения каждый раз, когда генерируется информация 24 о среде передвижения, и обновляет информацию 24 о среде передвижения, которая была ранее сгенерирована и сохранена. В этой операции вычисленная разность может быть сохранена, чтобы быть связанной с информацией идентификации полосы движения. В следующем процессе можно считывать только разницу, чтобы генерировать информацию 24 о среде передвижения.
[0135] Процесс переходит к процессу управления движением. Процессор 411 управления движением устройства 400 управления движением считывает самую последнюю информацию 24 о среде передвижения. На этапе S9 процессор 411 управления возбуждением получает информацию об обнаруженном объекте. На этапе S10 процессор 411 управления движением вычисляет маршрут для объезда объектов. На этапе S11 процессор 411 управления движением определяет действие вождения в каждой точке маршрута. Примеры движения включают «движение вперед», «рулевое управление» и «остановка». Примеры движения включают те, которые относятся к скорости, ускорению, углу поворота, замедлению и скорости замедления (ускорение при замедлении).
[0136] На этапе S12 процессор 411 управления движением создает план вождения, в котором каждая точка и действие вождения связаны друг с другом во времени. На этапе S13 процессор 411 управления движением создает команду управления движением, чтобы заставить транспортное средство выполнять план вождения. На этапе S14 процессор 411 управления движением передает команду управления движением в контроллер 280 транспортного средства. На этапе S15 процессор 411 управления движением заставляет транспортное средство выполнять план движения через контроллер 280 транспортного средства. Контроллер 280 транспортного средства выполняет управление движением на основе созданного плана движения. На этапе S16 процессор 411 управления движением выполняет управление движением до тех пор, пока не будет достигнут пункт назначения.
[0137] Управление транспортным средством управляется на основе сгенерированной информации 24 о среде передвижения, и поэтому можно выполнять управление движением в соответствии с фактической средой, полученной из информации обнаружения. Информация 24 о среде передвижения генерируется процессом объединения, в котором полоса движения и целевая полоса информации 21 карты точно связаны друг с другом, так что управляющее содержимое, вычисленное на основе информации 24 о среде передвижения, является точным и не изменяется. В результате достигается плавное движение, не заставляя транспортное средство выполнять ненужное рулевое управление и ускорение/замедление.
[0138] В частности, процессор 411 управления движением вычисляет целевое значение управления на основе фактического значения координаты X (ось X представляет собой направление ширины транспортного средства) рассматриваемого транспортного средства V1, целевого значения координаты X, соответствующего текущему положению, и усиления обратной связи. Целевое значение управления относится к углу поворота, угловой скорости поворота и другим параметрам, необходимым для перемещения транспортного средства V1 на целевое значение координаты X. Процессор 411 управления движением выводит целевое значение управления на бортовое устройство 200. Транспортное средство V1 движется по целевому маршруту, который определяется заданным боковым положением. Процессор 411 управления движением вычисляет целевое значение координаты Y (ось Y представляет собой направление движения транспортного средства) вдоль маршрута. Процессор 411 управления движением сравнивает текущее значение координаты Y и скорость и ускорение транспортного средства в текущем положении транспортного средства V1 с целевым значением координаты Y, соответствующим текущему значению координаты Y, а также скорость и ускорение транспортного средства в целевом значении координаты Y и вычисляет усиление обратной связи для значения координаты Y на основе результатов сравнения. Процессор 411 управления движением вычисляет целевое значение управления для значения координаты Y на основе скорости, ускорения и замедления транспортного средства, соответствующих целевому значению координаты Y, и коэффициента обратной связи для значения координаты Y.
[0139] Здесь целевое управляющее значение в направлении оси Y относится к управляющему значению для каждой операции приводного механизма (которая включает в себя работу двигателя внутреннего сгорания в случае автомобиля с двигателем и работу электродвигателя в случае электромобиля и может дополнительно включать распределение крутящего момента для двигателя внутреннего сгорания и электродвигателя в случае гибридного автомобиля) и операцию торможения для достижения ускорения, замедления и скорости транспортного средства, соответствующих целевому значению координаты Y. Например, в автомобиле с двигателем функция управления служит для расчета целевого количества всасываемого воздуха (целевой степени открытия дроссельной заслонки) и целевого количества впрыска топлива на основе значений текущего и целевого ускорения, замедления и т.д., и скорости транспортного средства, и для их отправки на приводное устройство 290. В качестве альтернативы функция управления может служить для расчета ускорения, замедления и скорости транспортного средства и их отправки в контроллер 280 транспортного средства, который может вычислять значение управления для каждой операции приводного механизма (который включает в себя работу двигателя внутреннего сгорания в случае автомобиля с двигателем и работу электродвигателя в случае электромобиля и может дополнительно включать распределение крутящего момента для двигателя внутреннего сгорания и электрического двигатель в случае гибридного автомобиля) и операции торможения для достижения этих ускорений, замедлений и скорости транспортного средства.
[0140] Процессор 411 управления движением выводит вычисленное целевое значение управления в направлении оси Y на бортовое устройство 200. Контроллер 280 транспортного средства выполняет управление рулевым управлением и управление движением, чтобы заставить рассматриваемое транспортное средство двигаться по целевому маршруту, который определяется целевым значением координаты X и целевым значением координаты Y. Процесс повторяется каждый раз, когда получается целевое значение координаты Y, и контрольное значение для каждого из полученных целевых значений координаты X выводится на бортовое устройство 200. Контроллер 280 транспортного средства выполняет команду управления движением в соответствии с командой от процессора 411 управления движением, пока транспортное средство не прибудет в пункт назначения.
[0141] Устройство 100 формирования информации о среде передвижения согласно одному или более вариантам осуществления настоящего изобретения сконфигурировано и работает, как указано выше, и способ генерирования информации о среде передвижения, которая используется в устройстве 100 генерирования информации о среде передвижения, выполняется, как указано выше; таким образом, можно получить следующие эффекты.
[0142] (1) В способе генерирования информации о среде передвижения согласно одному или более вариантам осуществления настоящего изобретения, когда на основе первой информации определяется, что дорога движения, которой принадлежит полоса движения, является заданной конкретной дорогой, первая информация и вторая информация объединяются для генерирования информации 24 о среде передвижения. Информация 24 о среде передвижения генерируется только тогда, когда дорога для движения, к которой принадлежит полоса движения рассматриваемого транспортного средства, является конкретной дорогой. Процесс генерирования информации 24 о среде передвижения выполняется в среде, которая определяется заданным условием. Путем управления (ограничения) времени выполнения процесса генерирования информации 24 о среде передвижения, информация о реальном пространстве, обнаруженная датчиком, и предварительно сохраненная информация 21 карты могут быть соответствующим образом объединены для генерирования информации 24 о среде передвижения, которая отражает ситуацию реального пространства.
Информация 24 о среде передвижения генерируется, когда рассматриваемое транспортное средство движется по конкретной дороге, и поэтому первая информация и вторая информация могут быть связаны друг с другом в правильном положении. Другими словами, при движении по конкретной дороге риск того, что первая информация (информация обнаружения) и вторая информация (информация 21 карты) неправильно связаны (сопоставлены), низок. В результате можно предотвратить считывание ошибочной полосы движения (информации 21 карты), которая не соответствует полосе движения, для расчета неправильного маршрута движения и генерирования неправильного плана движения. План движения, основанный на неверном маршруте движения, изменяется (корректируется) после выполнения. При изменении плана движения выполняется ненужное рулевое управление и ускорение/замедление, поэтому пассажиры могут испытывать дискомфорт. В одном или более вариантах осуществления настоящего изобретения, изменяя (модифицируя) вторую информацию на основе первой информации, основанной на информации обнаружения, может быть выполнено управление перемещением на основе информации 24 о среде передвижения, которая отражает фактически обнаруженную реальную среду. Управление движением, основанное на информации 24 о среде передвижения в соответствии с фактическими условиями, с меньшей вероятностью потребует изменения или корректировки маршрута движения, и, следовательно, можно устранить ненужное рулевое управление и ускорение/замедление. Этим можно добиться сокращения времени в пути до пункта назначения и снижения расхода топлива.
[0143] (2) В способе генерирования информации о среде передвижения согласно одному или более вариантам осуществления настоящего изобретения на основе первой информации и второй информации выполняется определение того, является ли дорога движения конкретной дорогой, и, следовательно, можно точно определить, является ли дорога движения конкретной дорогой, на основе фактически измеренной информации и предварительно подготовленной информации.
[0144] (3) В способе генерирования информации о среде передвижения согласно одному или более вариантам осуществления настоящего изобретения конкретная дорога определяется как дорога, на которой количество полос движения является заданным числом. Чем больше полос относится к одной дороге, тем сложнее указать уникальную полосу. Путем определения конкретной дороги на основе количества полос, принадлежащих одной дороге, определяется состояние, в котором уникальная полоса легко определяется. Количество полос может быть ограниченным числовым значением или также может быть числовым значением, определяющим диапазон. Определение может быть сделано с диапазоном, например, диапазоном заданного числа или менее. В сценарии движения по конкретной дороге, имеющей заданное количество полос, первая информация и вторая информация могут быть точно связаны друг с другом. Процесс генерирования информации 24 о среде передвижения выполняется в среде, в которой количество полос движения является заданным. Путем управления (ограничения) времени выполнения процесса генерирования информации 24 о среде передвижения информация о реальном пространстве, обнаруженная датчиком, и предварительно сохраненная информация 21 карты могут быть соответствующим образом объединены для генерирования информации 24 среды движения, которая отражает ситуация реального пространства.
[0145] (4) В способе генерирования информации о среде передвижения согласно одному или более вариантам осуществления настоящего изобретения конкретная дорога определяется как дорога, на которой количество полос движения во входящем направлении равно одной, и количество полос в исходящем направлении равно одной. Направление движения по полосе движения можно определить в соответствии с первой информацией, такой как захваченное изображение. Когда количество полос, принадлежащих дороге в одном направлении движения, равно одной, первая информация и вторая информация могут быть точно связаны друг с другом. Процесс генерирования информации 24 о среде передвижения выполняется в среде, в которой количество полос движения в одном направлении равно одной. Путем управления (ограничения) времени выполнения процесса генерирования информации 24 о среде передвижения информация о реальном пространстве, обнаруженная датчиком, и предварительно сохраненная информация 21 карты могут быть соответствующим образом объединены для генерирования информации 24 о среде передвижения, которая отражает ситуация реального пространства.
[0146] (5) В способе генерирования информации о среде передвижения согласно одному или более вариантам осуществления настоящего изобретения конкретная дорога определяется как дорога, на которой количество полос движения во входящем направлении или исходящем направлении равно одной. Направление движения по полосе движения можно определить в соответствии с первой информацией, такой как захваченное изображение. Когда количество полос, принадлежащих дороге в одном направлении движения, равно одной, первая информация и вторая информация могут быть точно связаны друг с другом. Процесс генерирования информации 24 о среде передвижения выполняется в среде, в которой количество полос движения в одном направлении равно одной. Путем управления (ограничения) времени выполнения процесса генерирования информации 24 о среде передвижения, информация о реальном пространстве, обнаруженная датчиком, и предварительно сохраненная информация 21 карты могут быть соответствующим образом объединены для генерирования информации 24 о среде передвижения, которая отражает ситуацию реального пространства.
[0147] (6) В способе генерирования информации о среде передвижения согласно одному или более вариантам осуществления настоящего изобретения конкретная дорога определяется как дорога, на которой количество полос, принадлежащих дороге, изменяется с двух или более на одну на стороне направления движения. Даже в случае, когда дорога движения включает в себя множество полос движения, когда определяется, что количество полос меняется на одну на стороне направления движения, можно ожидать, что ситуация/сценарий/время будут подходить для выполнения процесса генерирования информации 24 о среде передвижения в ближайшем будущем. Устройство 10 управления генерирует информацию 24 о среде передвижения, когда ожидается, что транспортное средство будет двигаться по конкретной дороге, подходящей для генерирования информации 24 о среде передвижения, и поэтому можно ожидать, что информация 24 о среде передвижения генерируется с небольшим отличием от фактической среды.
[0148] (7) В способе генерирования информации о среде передвижения согласно одному или более вариантам осуществления настоящего изобретения конкретная дорога определяется как дорога, по которой можно указать, по какой полосе из полос дороги движения движется транспортное средство, на основе рисунков разметок полос, определяющих две или более полосы движения.
Каждая разметка полосы представляет собой границу между двумя полосами движения справа и слева. Признаки разметок полосы сохраняются для каждой полосы. Даже в случае, когда количество полос на дороге движения равно двум или более, когда признаки разметок полос для каждой полосы различны, уникальная полоса может быть указана с высокой степенью достоверности. Определив конкретную дорогу как дорогу, на которой признаки всех разметок двух или более полос, принадлежащих одной дороге, различны, можно определить время движения или положение движения, в котором легко определяется уникальная полоса. Например, дорогу, на которой признаки разметки двух или более полос движения различаются, можно определить как конкретную дорогу.
Устройство 10 управления генерирует информацию 24 о среде передвижения, когда ожидается, что транспортное средство движется по конкретной дороге, подходящей для генерирования информации 24 о среде передвижения, и поэтому можно ожидать, что информация 24 о среде передвижения генерируется с небольшим отличием от фактической среды.
[0149] (8) В способе генерирования информации о среде передвижения согласно одному или более вариантам осуществления настоящего изобретения конкретная дорога определяется как дорога, на которой количество полос движения во входящем направлении или исходящем направлении равно двум или более, и можно указать, по какой полосе из полос дороги движения движется транспортное средство. Например, конкретная дорога представляет собой дорогу, на которой две или более полосы движения во входящем направлении или исходящем направлении дороги имеют разные разметки полос. Устройство 10 управления генерирует информацию 24 о среде передвижения, когда ожидается, что транспортное средство движется по конкретной дороге, подходящей для генерирования информации 24 о среде передвижения, и поэтому можно ожидать, что информация 24 о среде передвижения генерируется с небольшим отличием от фактической среды.
[0150] (9) В способе генерирования информации о среде передвижения согласно одному или более вариантам осуществления настоящего изобретения конкретная дорога определяется как дорога, на которой количество полос движения во входящем направлении или количество полос в исходящем направлении дорога состоит из двух или более полос, и полосы движения во входящем направлении или полосы движения в исходящем направлении определяются заранее заданными характерными разметками полос. На дороге с двумя или более полосами движения на каждой стороне разметка полосы на правой стороне дороги, включающей две или более полосы движения, может отличаться от разметки полосы на левой стороне. Это случай, когда, например, среди разметок полосы двух или более полос движения на самой встречной стороне дороги осуществляют посадки, а разметка полосы на самой внешней стороне (на противоположной стороне от встречной дороги) является бордюрным камнем. В этом случае полоса движения, имеющая разметку полосы посадкой, может быть указана как уникальная полоса движения на наиболее встречной стороне дороги, а полоса, имеющая разметку полосы движения бордюрным камнем, может быть указана как уникальная полоса движения на самой внешней стороне.
Когда разметка полосы определенной полосы является «заданной разметкой полосы» на дороге с двумя или более полосами движения с каждой стороны, положение полосы может быть конкретизировано, и в результате может быть выделена уникальная целевая полоса. Целевая полоса выбирается на основе определения того, включает ли полоса движения (целевая полоса) «заданную разметку полосы», и поэтому уникальная целевая полоса может быть указана с помощью признаков разметки полосы даже при движении по дорога с двумя и более полосами встречного движения. Когда полоса имеет «заданную разметку полосы движения», определяется, что среда подходит для процесса генерирования информации 24 о среде передвижения, и информация 24 о среде передвижения может быть сгенерирована при движении по такой полосе движения (конкретная дорога); следовательно, может быть сгенерирована высоконадежная информация 24 о среде передвижения.
[0151] (10) В способе генерирования информации о среде передвижения согласно одному или более вариантам осуществления настоящего изобретения вычисляется разность между первой информацией и второй информацией, и первая информация и вторая информация объединяются на основе вычисленной разности. Первая информация представляет собой фактическое пространство, в котором движется рассматриваемое транспортное средство, а вторая информация представляет виртуальное (идеальное) пространство, определенное в информации 21 карты. Разница между первой информацией и второй информацией заключается в несовпадении состояния реального пространства с идеальным состоянием, определяемым информацией 21 карты. Информация 21 карты изменяется на основе разницы, и, следовательно, может быть сгенерирована информация 24 о среде передвижения, которая отражает состояние реального пространства.
[0152] (11) В способе генерирования информации о среде передвижения согласно одному или более вариантам осуществления настоящего изобретения вторая информация изменяется на основе разности d1, так что соединяются полоса движения и целевая полоса. Полоса движения, обнаруженная в реальном пространстве, в котором существует рассматриваемое транспортное средство, и виртуальная целевая полоса, определенная в информации 21 карты, могут быть соединены. Может быть сгенерирована информация 24 о среде передвижения, которая отражает первую информацию, в которой отражено реальное пространство.
[0153] (12) В способе генерирования информации о среде передвижения согласно одному или более вариантам осуществления настоящего изобретения вторая информация, касающаяся области, включающей целевую полосу, изменяется на основе разности d1 и первой информации, так что целевая полоса соединяется с полосой движения. Вторая информация, касающаяся области, включающей целевую полосу движения, включает в себя информацию о положении, дальности, форме, радиусе кривизны целевой полосы движения, положении и дальности области, включая целевую полосу движения, или информацию о других полосах движения. Область первой информации, включающая полосу движения, обнаруженную в реальном пространстве, в котором существует рассматриваемое транспортное средство, и область, включающая виртуальную целевую полосу движения, определенную в информации 21 карты, могут быть соединены в правильном положении. Может быть сгенерирована информация 24 о среде передвижения, которая отражает первую информацию, касающуюся полосы движения, определенной в реальном пространстве.
[0154] (13) В способе генерирования информации о среде передвижения согласно одному или более вариантам осуществления настоящего изобретения, когда определяется, что дорога движения является конкретной дорогой, условие для связывания полосы движения и целевой полосы движения друг с другом, ослабляется. В условиях движения, в которых рассматриваемое транспортное средство движется по конкретной дороге и менее вероятны ошибки согласования полос, пороговое значение, касающееся согласования полос движения, может быть ослаблено, чтобы уменьшить вычислительную нагрузку и обеспечить выполнение плавной обработки.
[0155] (14) В способе генерирования информации о среде передвижения согласно одному или более вариантам осуществления настоящего изобретения, когда дорога движения является конкретной дорогой, информация разметки полосы движения, связанная с целевой полосой второй информации, изменяется на основе первой информации. Информация 21 карты может отражать информацию обнаружения, касающуюся разметок полосы движения, которая фактически получена, когда рассматриваемое транспортное средство движется. Информация 21 карты может обновляться в реальном времени, например, при изменении разметок полосы движения.
[0156] (15) В способе генерирования информации о среде передвижения согласно одному или более вариантам осуществления настоящего изобретения, когда количество передвижений равно заданному количеству раз или более и количество прошлых записей о передвижениях велико, управление устройство 10 использует первую информацию на основе информации обнаружения, обнаруженной во время движения в прошлые моменты времени, и, таким образом, может изменять вторую информацию, устраняя при этом влияние окружающей среды.
[0157] (16) В способе генерирования информации о среде передвижения согласно одному или более вариантам осуществления настоящего изобретения устройство 10 управления обращается к накопленной первой информации, для которой накопленное количество первой информации от других транспортных средств является заданным количеством или более, и изменяет вторую информацию на основе репрезентативного значения первой информации, сохраненной для каждой полосы движения. Когда количество передвижений других транспортных средств равно заданному количеству раз или более, то есть когда накопленное количество сохраненной первой информации равно заданному количеству или более, а количество прошлых записей о передвижениях велико, устройство управления 10 может использовать первую информацию на основе информации обнаружения, которая была обнаружена во время движения других транспортных средств, чтобы тем самым изменить вторую информацию, устраняя влияние окружающей среды.
[0158] (17) В способе управления движением согласно одному или более вариантам осуществления настоящего изобретения управление транспортным средством осуществляется на основе сгенерированной информации 24 о среде передвижения, и поэтому движение может быть достигнуто в соответствии с определением, основанным на информация об обнаружении в реальных условиях. Согласно способу генерирования информации о среде передвижения в одном или более вариантах осуществления настоящего изобретения первая информация и вторая информация своевременно объединяются на основе первой информации на основе фактической ситуации вокруг рассматриваемого транспортного средства и, следовательно, информация о среде передвижения, которая отражает реальную ситуацию, может быть сгенерирована при обращении к информации 21 карты. При автоматическом или автономном управлении вождением управление движением/поведением рассматриваемого транспортного средства осуществляется автономно на основе информации обнаружения в реальном времени от бортового устройства 220 обнаружения и датчика 260 транспортного средства. Изменяя/модифицируя информацию 21 карты в соответствии с информацией обнаружения и комбинируя первую информацию и вторую информацию, можно надлежащим образом указать маршрут и добиться плавного автономного движения. Контент управления не изменяется из-за разницы между полосой движения и целевой полосой в информации 21 карты, и может выполняться плавное движение.
[0159] (18) В способе управления движением согласно одному или более вариантам осуществления настоящего изобретения маршрут движения, включающий точку соединения между полосой движения и целевой полосой движения, вычисляется на основе информации о среде передвижения, в которой первая информация и вторая информация объединяется своевременно, так что соединяются полоса движения и целевая полоса информации карты, соответствующая полосе движения. Управляемое транспортное средство движется на основе маршрута движения, в котором полоса движения рассматриваемого транспортного средства на основе первой информации и целевая полоса на основе второй информации соединяются в точке соединения и, следовательно, управление движением может выполняться на основе информации о среде передвижения, которая отражает реальную ситуацию при обращении к информации 21 карты. Более того, могут быть получены те же действие и эффект, что и в предыдущем абзаце.
[01660] (19) В способе управления движением согласно одному или более вариантам осуществления настоящего изобретения объединяются первая информация и вторая информация, относящиеся к полосе движения, существующей в позиции дальше, чем окрестности рассматриваемого транспортного средства, в соответствии с условиями движения, полученными с помощью первой информации. То есть в этом способе управления движением первая информация о рассматриваемом транспортном средстве и вторая информация в местоположении (области на стороне назначения) дальше, чем первая информация, объединяются так, что соединяются полоса движения и целевая полоса. Это позволяет рассчитать маршрут движения на основе информации о среде передвижения, в которой первая информация об рассматриваемом транспортном средстве и вторая информация о дальней стороне в качестве пункта назначения рассматриваемого транспортного средства объединяются таким образом, что соединяются полоса движения и целевая полоса. Маршрут движения представляет собой полосу движения (маршрут), в которой полоса движения на основе первой информации и целевая полоса на основе второй информации соединены последовательно. Управляя рассматриваемым транспортным средством для движения по маршруту движения, соединенному от фактической полосы движения на основе информации обнаружения датчика с целевой полосой, ведущей к месту назначения, управление движением может выполняться с учетом условий движения на дальней стороне при обращении к информации 21 карты и адаптации к фактическим условиям передвижения. Более того, могут быть получены те же действие и эффект, что и в одном или более предыдущих абзацах.
[0161] (20) Устройство 100 генерирования информации о среде передвижения согласно одному или более вариантам осуществления настоящего изобретения демонстрирует то же действие и эффект, что и в вышеописанном способе генерирования информации о среде передвижения.
[0162] Ранее объясненные варианты осуществления изобретения описаны для облегчения понимания настоящего изобретения и не ограничивают объем настоящего изобретения. Поэтому предполагается, что элементы, раскрытые в вышеуказанных вариантах осуществления, включают в себя все изменения в конструкции и эквиваленты, подпадающие под объем технических сведений в настоящем изобретении.
Перечень ссылочных позиций
[0163] 1 - система управления движением
100 - устройство генерирования информации о среде передвижения
10 - устройство управления
11 - процессор
20 - устройство хранения
21 - информация карты
22 - информация о полосе движения
23 - информация о правилах дорожного движения
24 - информация о туристической среде
30 - устройство связи
200 - бортовое устройство
210 - устройство связи
220 - устройство обнаружения, датчик
221 - камера
222 - радарное устройство
230 - навигационное устройство
231 - устройство определения положения, датчик
232 - устройство хранения
240 - устройство хранения
241 - информация карты
242 - информация о полосе движения
243 - информация о правилах дорожного движения
250 - выходное устройство
251 - дисплей
252 - динамик
260 - датчик транспортного средства, датчик
261 - датчик угла поворота рулевого колеса
262 - датчик скорости транспортного средства
263 - датчик пространственного положения
270 - устройство для удержания полосы движения
280 - контроллер
290 - приводное устройство
295 - рулевое устройство
300 - сервер
310 - устройство управления
311 - процессор
320 - устройство хранения
321 - информация карты
322 - информация о полосе движения
323 - информация о правилах дорожного движения
330 - устройство связи
400 - оборудование управления движением
410 - устройство управления
411 - процессор управления движением
420 - устройство хранения
430 - устройство связи
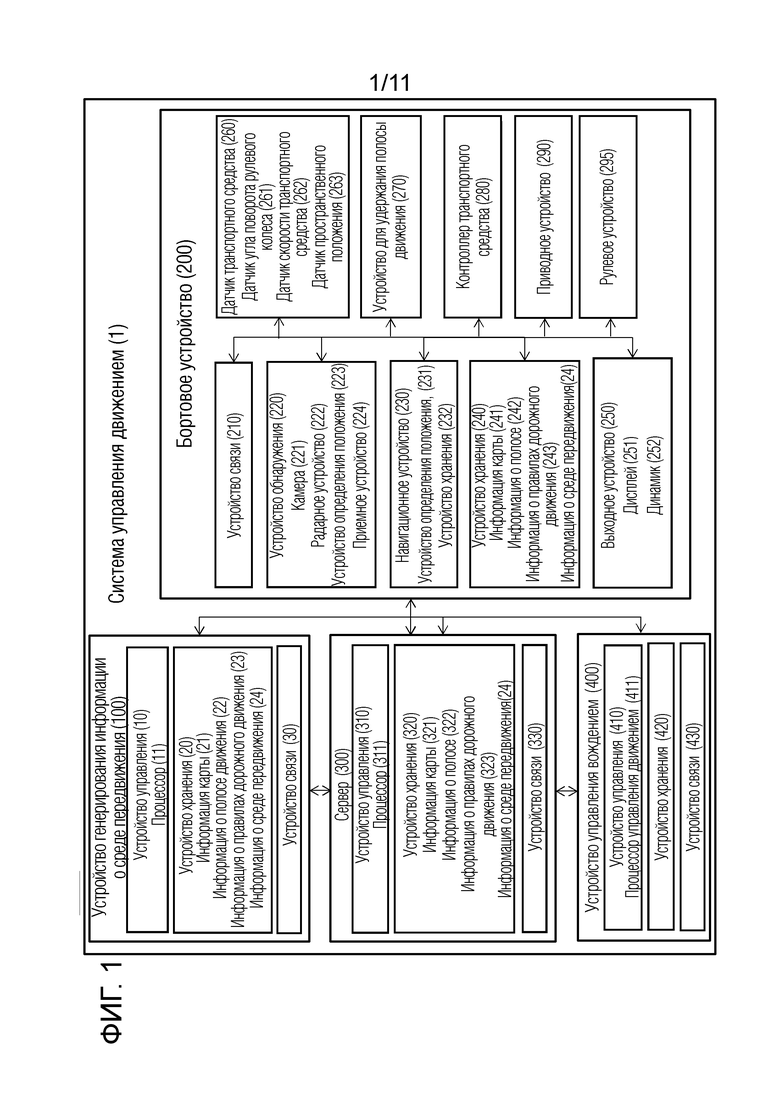
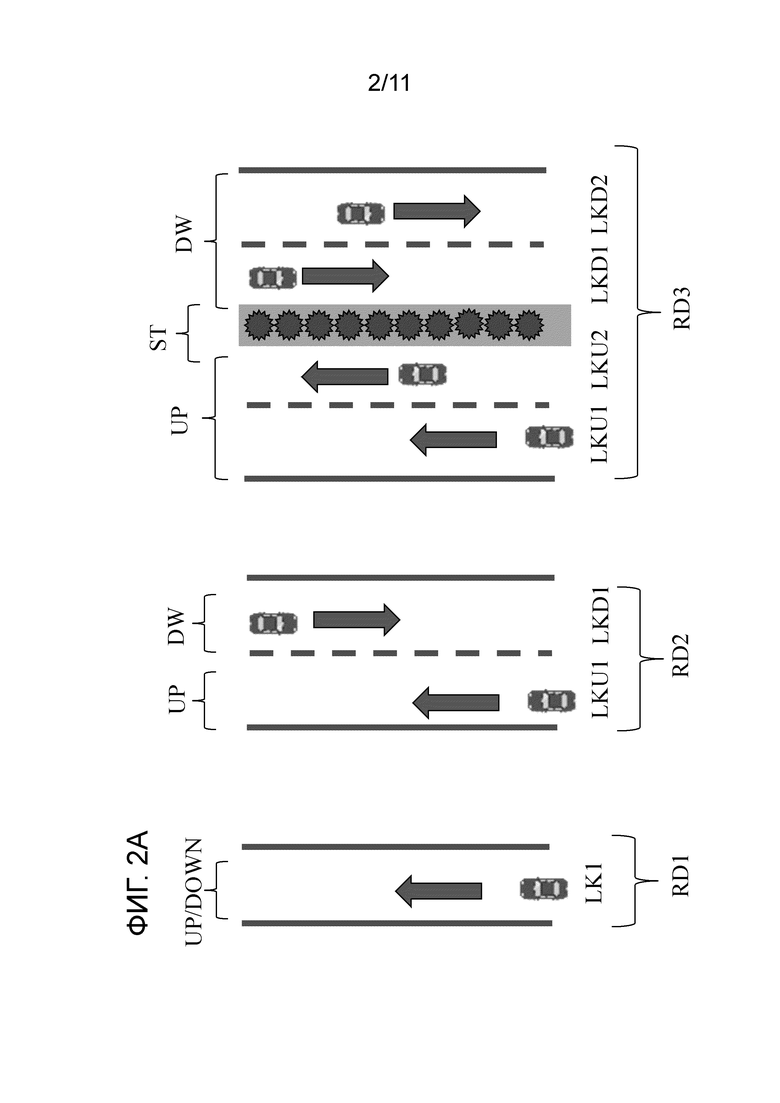
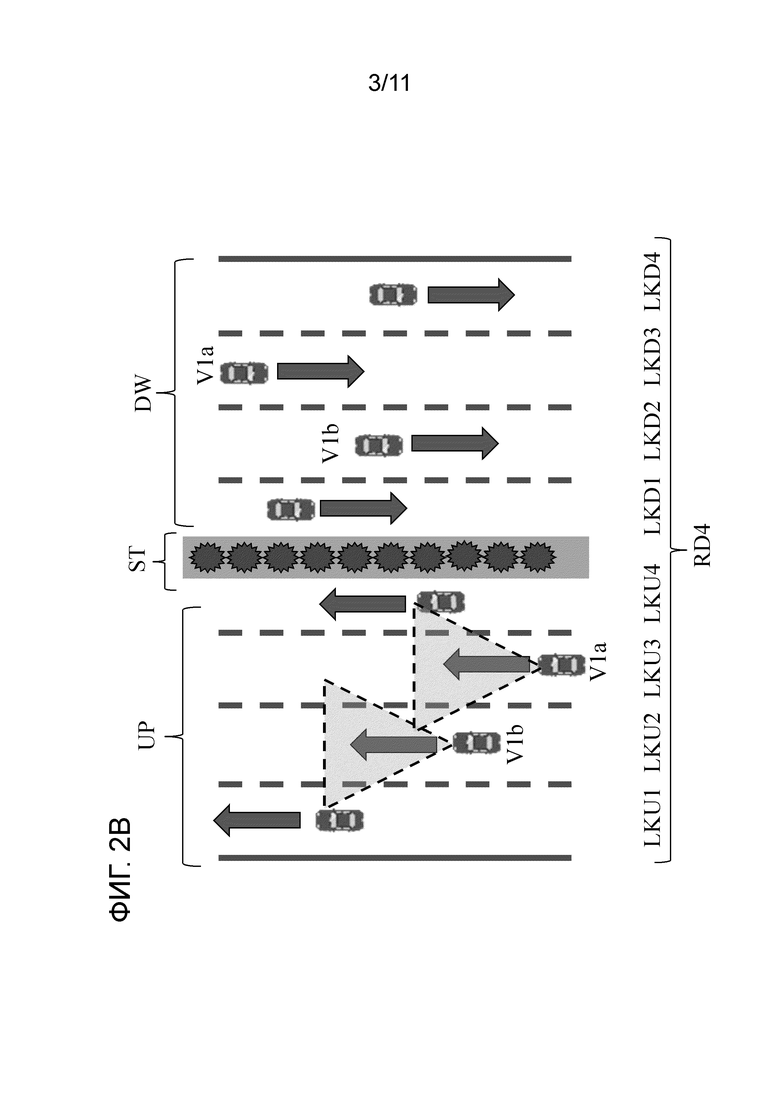
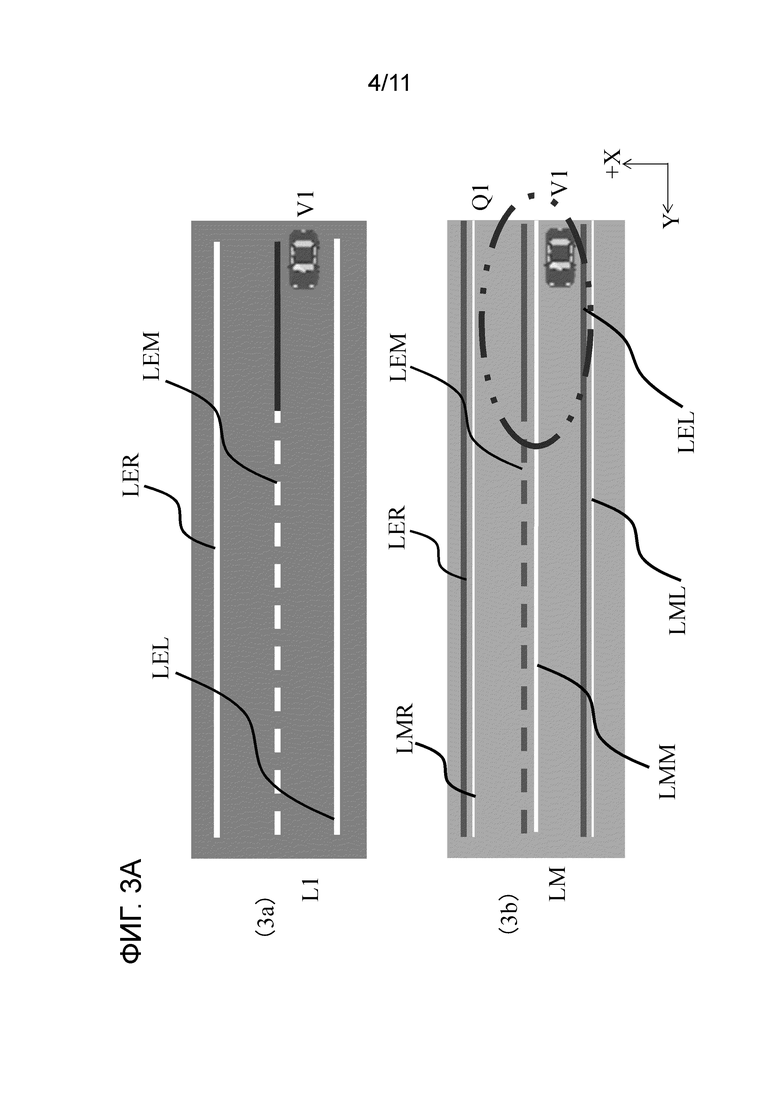
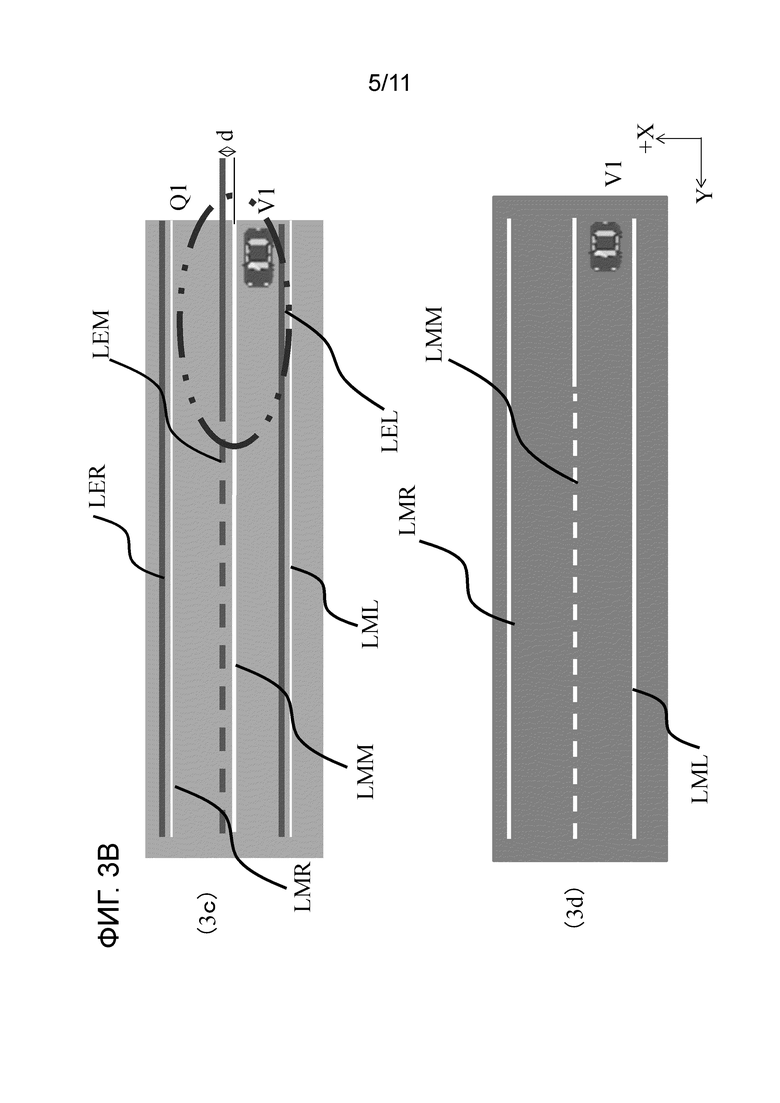
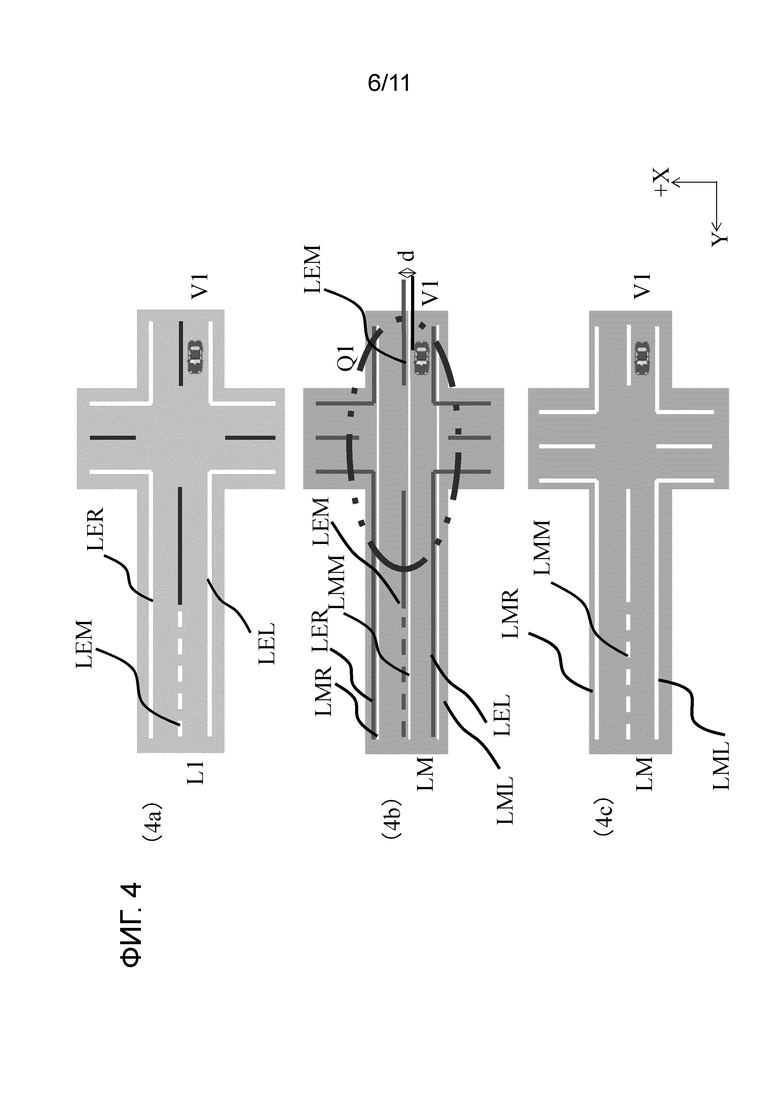
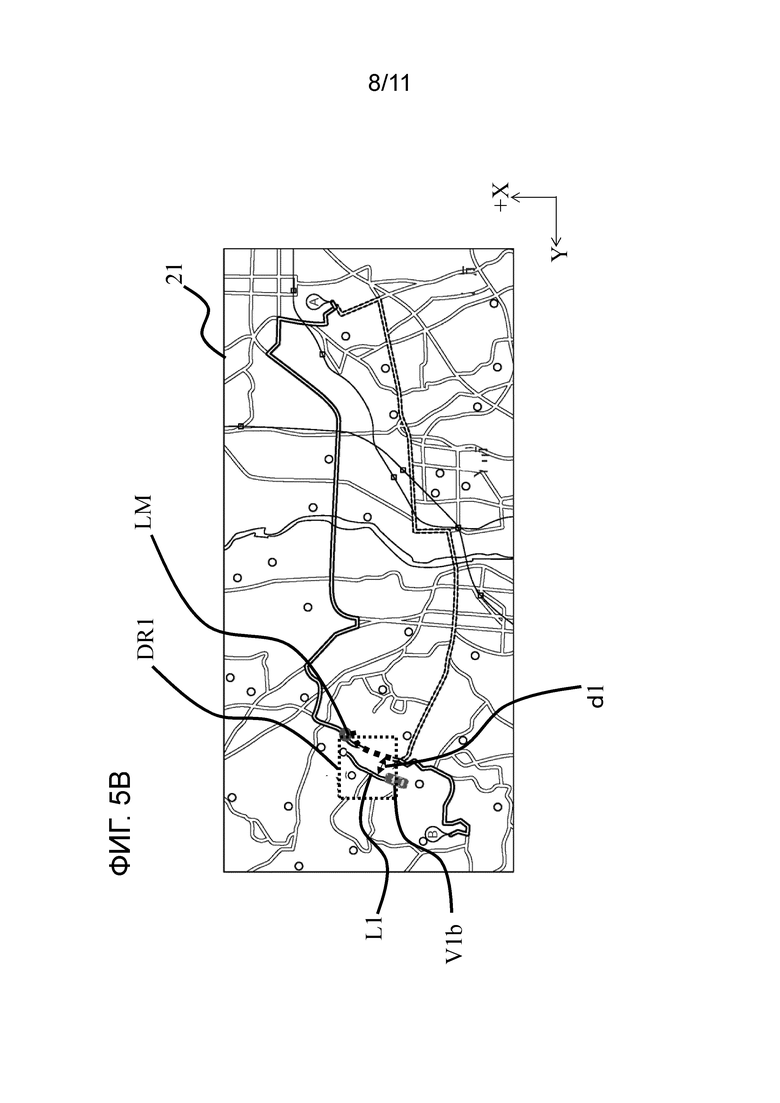
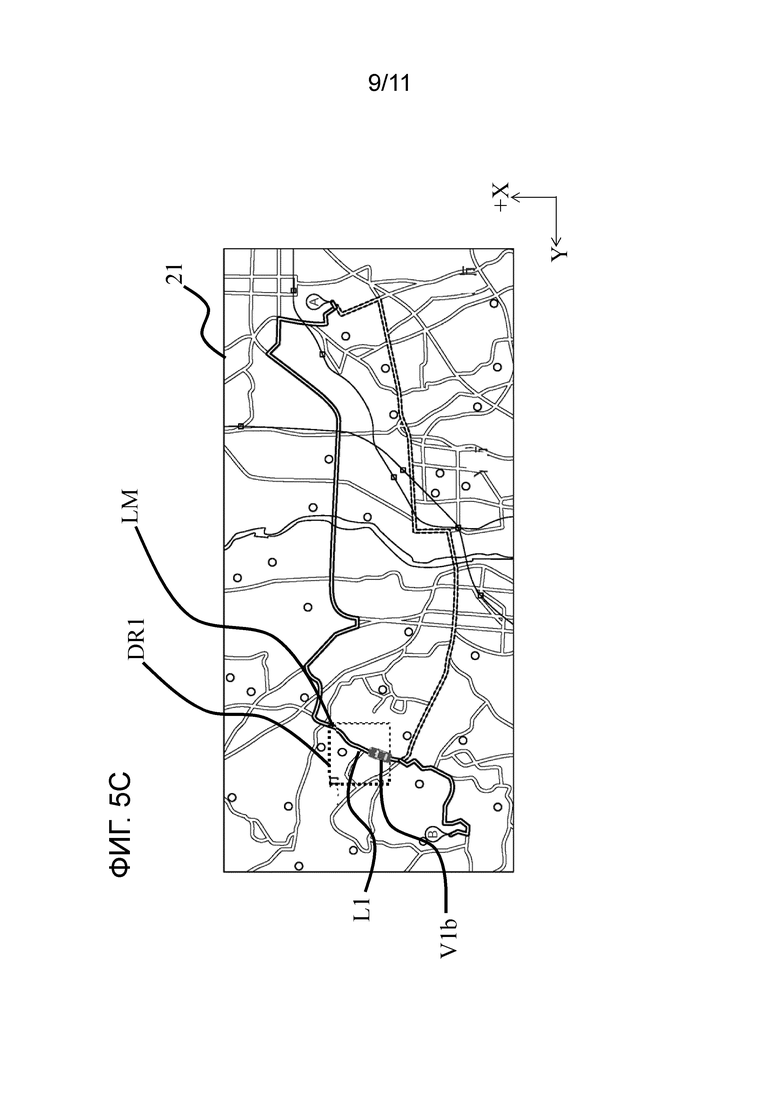
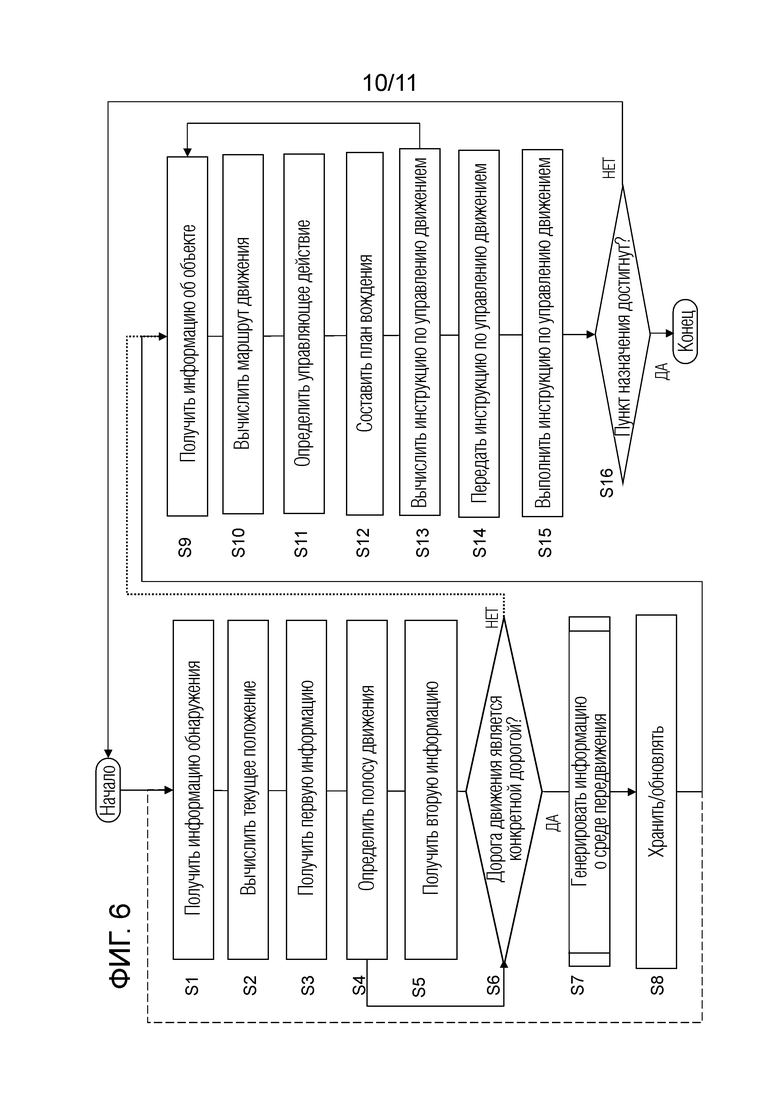
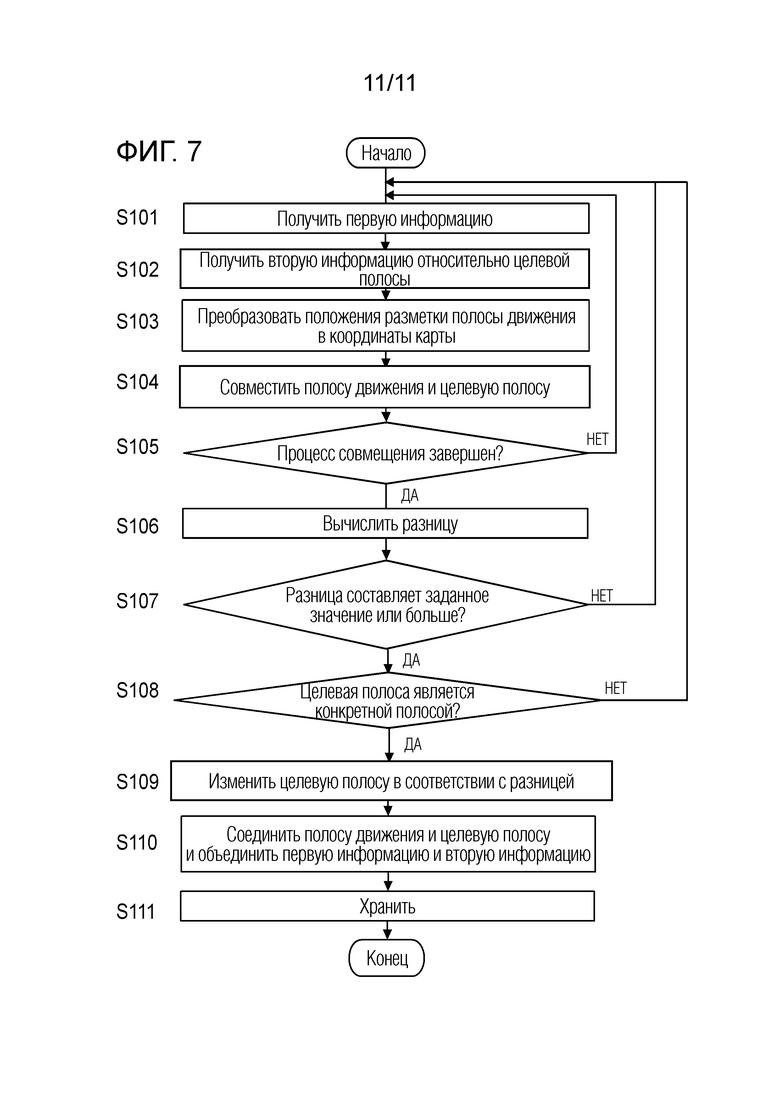
Изобретение относится к способу генерирования информации о среде передвижения для транспортного средства. Способ генерирования информации о среде передвижения для транспортного средства, выполняемый процессором и включающий получение первой информации относительно окружающей среды передвижения, включая полосу движения, по которой движется рассматриваемое транспортное средство, причем первая информация основана на информации обнаружения от датчика, установленного на рассматриваемом транспортном средстве, обращение к информации карты, хранящейся в запоминающем устройстве, для получения второй информации, касающейся полос дороги. Способ также включает извлечение признаков дороги движения, к которой принадлежит полоса движения, по которой движется рассматриваемое транспортное средство, на основе первой информации, определение того, является ли дорога движения, к которой принадлежит полоса движения, заданной конкретной дорогой, на основе признаков дороги движения. Объединение первой информации и второй информации для генерирования информации о среде передвижения для транспортного средства, когда определено, что дорога движения является конкретной дорогой. Достигается своевременное выполнение процесса генерирования информации о среде передвижения. 3 н. и 17 з.п. ф-лы, 11 ил.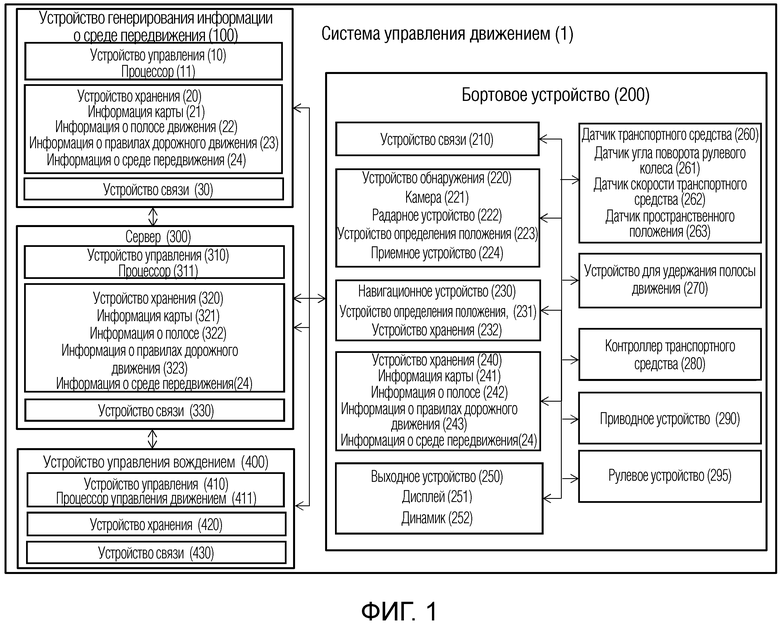
1. Способ генерирования информации о среде передвижения для транспортного средства, выполняемый процессором и включающий:
получение первой информации относительно окружающей среды передвижения, включая полосу движения, по которой движется рассматриваемое транспортное средство, причем первая информация основана на информации обнаружения от датчика, установленного на рассматриваемом транспортном средстве;
обращение к информации карты, хранящейся в запоминающем устройстве, для получения второй информации, касающейся полос дороги;
извлечение признаков дороги движения, к которой принадлежит полоса движения, по которой движется рассматриваемое транспортное средство, на основе первой информации;
определение того, является ли дорога движения, к которой принадлежит полоса движения, заданной конкретной дорогой, на основе признаков дороги движения; и
объединение первой информации и второй информации для генерирования информации о среде передвижения для транспортного средства, когда определено, что дорога движения является конкретной дорогой.
2. Способ генерирования информации о среде передвижения для транспортного средства по п. 1, включающий определение того, является ли дорога движения конкретной дорогой, на основе первой информации и второй информации.
3. Способ генерирования информации о среде передвижения для транспортного средства по п.1 или 2, включающий:
получение количества полос, принадлежащих дороге движения; и,
когда количество полос движения является заданным количеством, определение того, что дорога движения является конкретной дорогой.
4. Способ генерирования информации о среде передвижения для транспортного средства по п.1 или 2, включающий:
получение количества полос, принадлежащих дороге движения;
определение того, являются ли количество полос во входящем направлении и количество полос в исходящем направлении одной; и,
когда определено, что количество полос движения во входящем направлении дороги движения и количество полос в исходящем направлении проезжей дороги равны одной, определение того, что дорога движения является конкретной дорогой.
5. Способ генерирования информации о среде передвижения для транспортного средства по п. 1 или 2, включающий:
получение количества полос, принадлежащих дороге движения;
определение того, равно ли количество полос движения во входящем или исходящем направлении одной; и,
когда определено, что количество полос движения во входящем или исходящем направлении дороги движения равно одной, определение того, что дорога движения является конкретной дорогой.
6. Способ генерирования информации о среде передвижения для транспортного средства по п.1 или 2, включающий:
получение изменения количества полос на стороне направления движения полосы движения; и,
когда определяется, что количество полос изменяется с двух или более на одну, определение того, что дорога движения является конкретной дорогой.
7. Способ генерирования информации о среде передвижения для транспортного средства по п.1 или 2, включающий:
получение количества полос, принадлежащих дороге движения; и,
когда определено, что количество полос на дороге движения равно двум или более, и дорога движения может быть указана относительно того, по какой полосе из полос дороги движения движется транспортное средство, на основе рисунков разметок полос, которые определяют полосы, принадлежащие дороге движения, определение того, что дорога движения является конкретной дорогой.
8. Способ генерирования информации о среде передвижения для транспортного средства по п.1 или 2, включающий:
получение количества полос дороги движения; и,
когда определено, что количество полос во входящем направлении или исходящем направлении дороги движения равно двум или более, и можно указать, по какой полосе из полос дороги движения движется транспортное средство, на основе рисунка разметки полос, определяющего полосы во входящем направлении или полосы в исходящем направлении, определение того, что дорога движения является конкретной дорогой.
9. Способ генерирования информации о среде передвижения для транспортного средства по п.1 или 2, включающий:
получение количества полос дороги движения; и,
когда определено, что количество полос во входящем направлении или количество полос в исходящем направлении дороги движения равно двум или более, и полосы во входящем направлении или полосы в исходящем направлении определяются заданной характеристикой разметки полос, определение того, что дорога движения является конкретной дорогой.
10. Способ генерирования информации о среде передвижения для транспортного средства по любому из пп.1-9, включающий вычисление разницы между первой информацией и второй информацией и объединение первой информации и второй информации на основе указанной разницы.
11. Способ генерирования информации о среде передвижения для транспортного средства по п. 10, включающий объединение первой информации и второй информации на основе разницы в положении между первой информацией и второй информацией так, чтобы полоса движения и целевая полоса информации карты, соответствующей полосе движения, были соединены.
12. Способ генерирования информации о среде передвижения для транспортного средства по п. 10, включающий объединение первой информации и второй информации на основе разницы в положении между первой информацией и второй информацией так, чтобы были соединены первая область, включающая полосу движения, и вторая область, включающая целевую полосу из информации карты, соответствующей полосе движения.
13. Способ генерирования информации о среде передвижения для транспортного средства по п. 11 или 12, включающий, когда определено, что полоса движения является конкретной полосой, ослабление условия связывания полосы движения и целевой полосы друг с другом.
14. Способ генерирования информации о среде передвижения для транспортного средства по любому из пп.11-13, включающий, когда определено, что полоса движения является конкретной полосой движения, изменение информации разметки полосы на основе первой информации, причем информация разметки полосы включается во вторую информацию и связывается с целевой полосой информации карты, соответствующей полосе движения.
15. Способ генерирования информации о среде передвижения для транспортного средства по любому из пп.1-14, включающий:
накопление историй передвижений, включая первую информацию и местоположения передвижений, обнаруженных в прошлом; и,
когда определяется, что полоса движения является конкретной полосой, объединение первой информации и второй информации на основе истории передвижений, среди историй передвижений, связанных с дорогой движения, в которой количество проездов рассматриваемого транспортного средства является заданным количеством раз или более.
16. Способ генерирования информации о среде передвижения для транспортного средства по любому из пп.1-14, включающий:
накопление историй передвижений, включая первую информацию и местоположения передвижений, переданные на сервер по линии связи; и,
когда определяется, что полоса движения является конкретной полосой, обращение к эталонной истории передвижений, среди историй передвижений, связанных с дорогой, в которой количество проездов рассматриваемого транспортного средства является заданным числом раз или более для объединения первой информации эталонной истории передвижений и второй информации.
17. Способ управления движением для транспортного средства, включающий:
обращение к информации о среде передвижения для транспортного средства, полученной способом генерирования информации о среде передвижения для транспортного средства по любому из пп.1-16;
вычисление маршрута движения рассматриваемого транспортного средства на основе информации о среде передвижения для транспортного средства; и
обеспечение движения рассматриваемого транспортного средства по маршруту движения.
18. Способ управления движением для транспортного средства по п. 17, включающий:
объединение первой информации и второй информации для генерирования информации о среде передвижения для транспортного средства так, что соединяются полоса движения и целевая полоса информации карты, соответствующей полосе движения; и
вычисление на основе информации о среде передвижения для транспортного средства маршрута движения, включающего в себя точку соединения между полосой движения и целевой полосой информации карты, соответствующей полосе движения.
19. Способ управления движением для транспортного средства по п. 17, включающий:
получение первой информации и второй информации относительно полосы, существующей в положении дальше, чем окрестности рассматриваемого транспортного средства, в соответствии со средой передвижения, полученной с помощью первой информации;
объединение первой информации и второй информации для генерирования информации о среде передвижения для транспортного средства так, что соединяются полоса движения и целевая полоса информации карты, соответствующей полосе движения; и
расчет маршрута передвижения на основе информации о среде передвижения для транспортного средства.
20. Устройство генерирования информации о среде передвижения для транспортного средства, содержащее:
устройство связи, выполненное с возможностью получения информации обнаружения от датчика, установленного на рассматриваемом транспортном средстве; и
процессор, выполненный с возможностью выполнения процесса генерирования информации о среде передвижения для транспортного средства,
при этом процессор выполняет:
процесс получения информации обнаружения через устройство связи;
процесс получения первой информации относительно окружающей среды передвижения, включая полосу движения, по которой движется рассматриваемое транспортное средство, причем первая информация основана на информации обнаружения от датчика;
процесс обращения к информации карты, хранящейся в запоминающем устройстве, для получения второй информации, касающейся полос дороги;
процесс извлечения признаков дороги движения, которой принадлежит полоса движения, по которой движется рассматриваемое транспортное средство, на основе первой информации;
процесс определения того, является ли дорога движения, которой принадлежит полоса движения, заданной конкретной дорогой на основе признаков дороги движения; и
процесс объединения первой информации и второй информации для генерирования информации о среде передвижения для транспортного средства, когда определено, что дорога движения является конкретной дорогой.
| WO 2017056249 A1, 06.04.2017 | |||
| US 2017242441 A1, 24.08.2017 | |||
| СИСТЕМА И СПОСОБ КОНТРОЛЯ ПОЛОСЫ ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2572939C9 |

