Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к способу и устройству для формирования целевой скорости транспортного средства для транспортного средства с помощью при вождении, в которых формируется целевое ускорение/замедление транспортного средства-носителя в соответствии с ограничением скорости для маршрута движения транспортного средства-носителя.
Уровень техники
[0002] В уровне техники известны устройства ограничения скорости для установки ограничения ускорения в соответствии с отклонением между ограничением скорости и скоростью транспортного средства-носителя (например, см. Патентный источник 1).
Документы уровня техники
Патентные документы
[0003] Патентный источник 1: JP-A 2016-183647
Раскрытие изобретения
Проблемы, решаемые изобретением
[0004] Однако в устройствах из уровня техники учитывается только отклонение между ограничением скорости и скоростью транспортного средства-носителя, а не фактическое ограничение скорости. Поэтому трудно достичь подходящего ощущения ускорения во время движения по скоростным дорогам с высокими ограничениями скорости и движения по городским районам с низкими ограничениями скорости. В частности, одинаковое ускорение (градиент увеличения скорости) устанавливается в тех случаях, когда отклонения между ограничением скорости и скоростью транспортного средства-носителя одинаковы. Поэтому, когда установлено ускорение, подходящее для движения по скоростным дорогам, имеющим высокие ограничения скорости, ускорение будет чрезмерным во время движения по городским районам, и у пассажира будут возникать неприятные ощущения, а транспортный поток будет нарушен. И наоборот, когда установлено ускорение, подходящее для движения в городских районах с низкими ограничениями скорости, ускорение будет недостаточным для движения по скоростным дорогам, и у пассажира будут возникать неприятные ощущения, а транспортный поток будет нарушен.
[0005] Настоящее изобретение было создано с учетом проблемы, описанной выше, при этом задача настоящего изобретения состоит в предотвращении неприятных ощущений у пассажира при одновременном предотвращении любого нарушения транспортных потоков в соответствии с различными дорогами, имеющими различные ограничения скорости, при движении с помощью при вождении.
Средства для решения проблем
[0006] Для решения задачи, описанной выше, настоящее изобретение представляет собой способ формирования целевой скорости транспортного средства для транспортного средства с помощью при вождении, в котором целевая скорость транспортного средства для транспортного средства-носителя формируется в соответствии с ограничением скорости на маршруте движения транспортного средства-носителя. Во время движения получают ограничение скорости на маршруте движения транспортного средства-носителя. Формируют целевое ускорение в соответствии с ограничением скорости. Во время формирования целевого ускорения ограничение ускорения ослабляется в большей степени, когда ограничение скорости на маршруте движения транспортного средства-носителя является высоким, по сравнению с тем, когда ограничение скорости на маршруте движения транспортного средства-носителя является низким.
ЭФФЕКТ ИЗОБРЕТЕНИЯ
[0007] Как указано выше, формулирование плана скорости транспортного средства, полученного из характеристик ускорения, которые соответствуют ограничению скорости на маршруте движения транспортного средства-носителя, позволяет предотвратить возникновение неприятных ощущений у пассажира, в то же время предотвращая любое нарушение транспортных потоков, в соответствии с тем, что различные дороги имеют различные ограничения скорости, при движении с помощью при вождении.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0008] Фиг.1 - общая схема системы, показывающая систему управления автономным управлением, в которой применяются способ и устройство формирования целевой скорости транспортного средства в первом варианте осуществления;
Фиг.2 - блок-схема, показывающая подробную конфигурацию блока формирования целевой скорости транспортного средства в способе и устройстве для формирования целевой скорости транспортного средства в первом варианте осуществления;
Фиг.3 - блок-схема, показывающая последовательность операций процесса управления характеристиками ускорения, выполняемого блоком управления автономным управлением в первом варианте осуществления;
Фиг.4 - блок-схема, показывающая последовательность операций процесса установки ограничения скорости на этапе S2 блок-схемы по фиг.3;
Фиг.5 - блок-схема, показывающая последовательность операций процесса установки ограничения ускорения на этапе S3 блок-схемы по фиг.3;
Фиг.6 - схема карты, показывающая один пример первой карты ограничений ускорения, используемой в процессе установки ограничений ускорения;
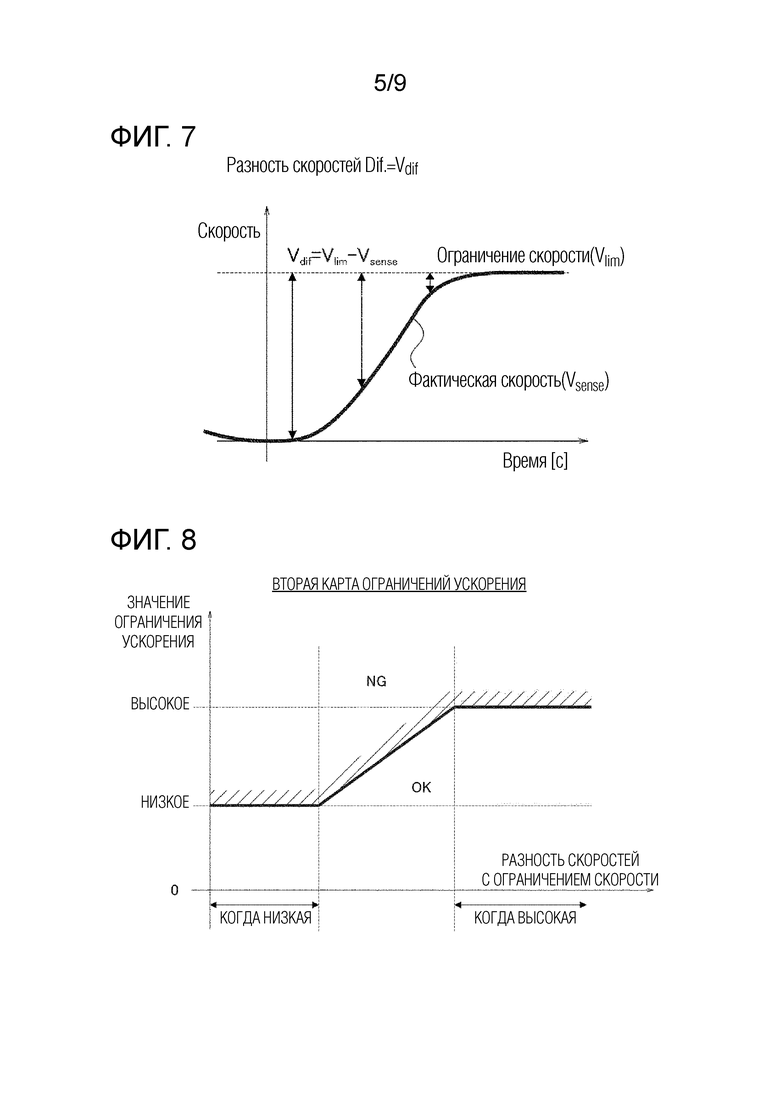
Фиг.7 - диаграмма разности скоростей, показывающая разность скоростей между ограничением скорости и фактической скоростью;
Фиг.8 - схема карты, показывающая один пример второй карты ограничений ускорения, используемой в процессе установки ограничений ускорения;
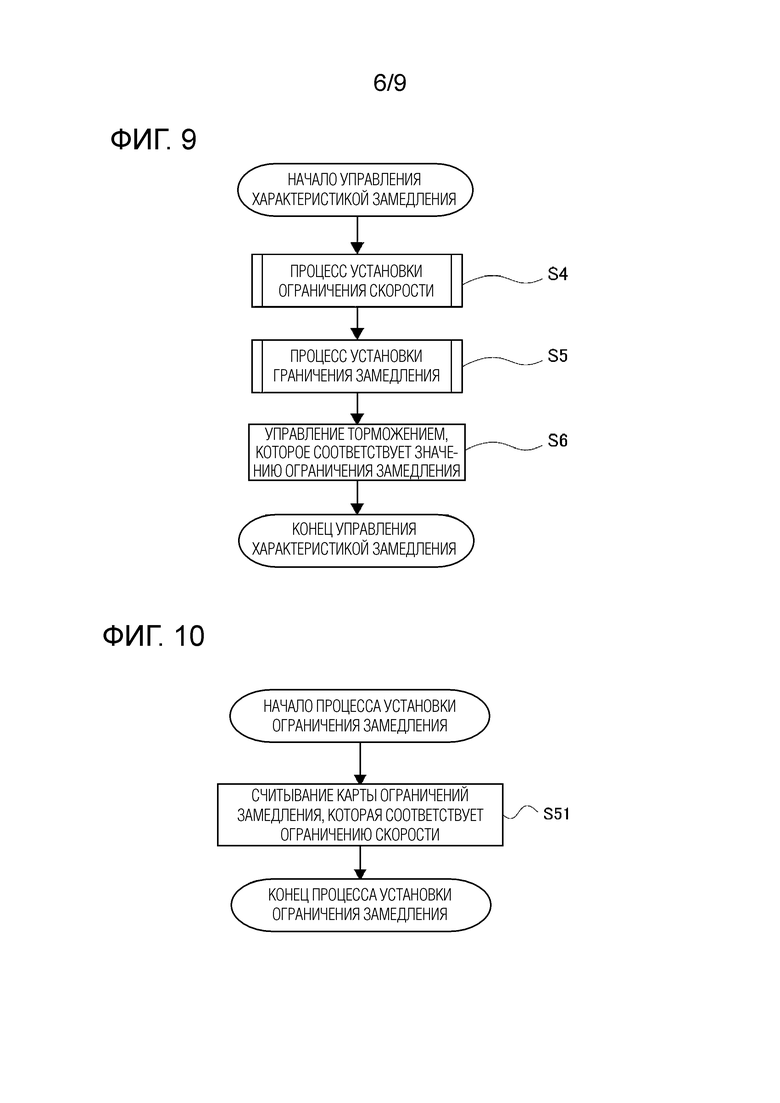
Фиг.9 - блок-схема, показывающая последовательность операций процесса управления характеристиками замедления, выполняемого блоком управления автономным управлением в первом варианте осуществления;
Фиг.10 - блок-схема, показывающая последовательность операций процесса установки ограничений замедления на этапе S5 блок-схемы по фиг.9;
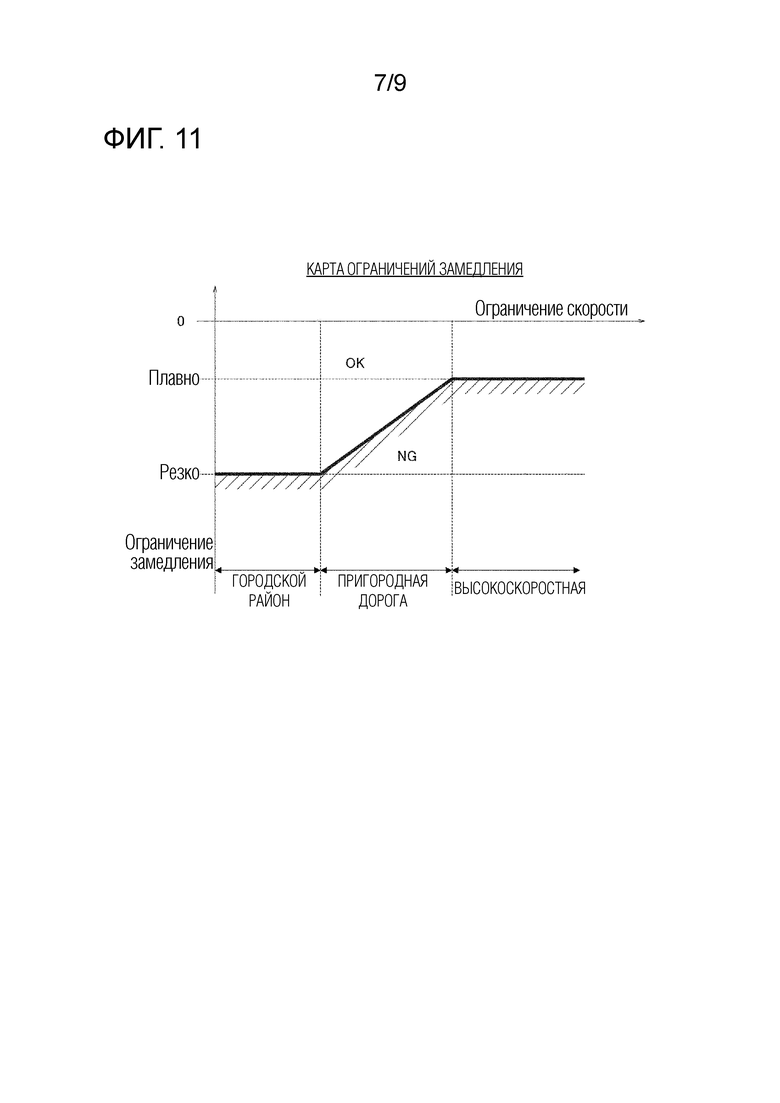
Фиг.11 - схема карты, показывающая один пример карты ограничений замедления, используемой в процессе установки ограничений замедления;
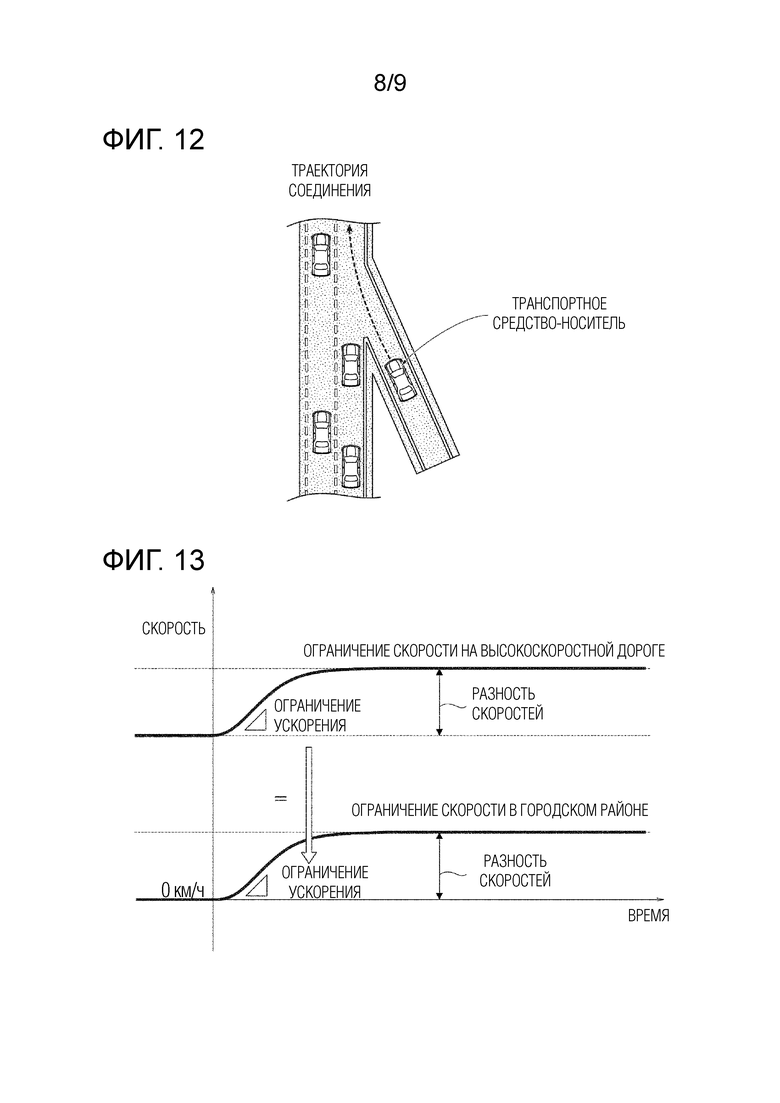
Фиг.12 - принципиальная схема операции, показывающая операцию соединения в отношении маршрута, соединяющего обычную дорогу с высокоскоростной дорогой;
Фиг.13 - временная диаграмма, показывающая характеристики скорости, полученные из ускорения при соединении пригородной дороги с высокоскоростной дорогой, и характеристики скорости, полученные из ускорения при начале движения из состояния стоянки на дороге в городском районе, в сравнительном примере;
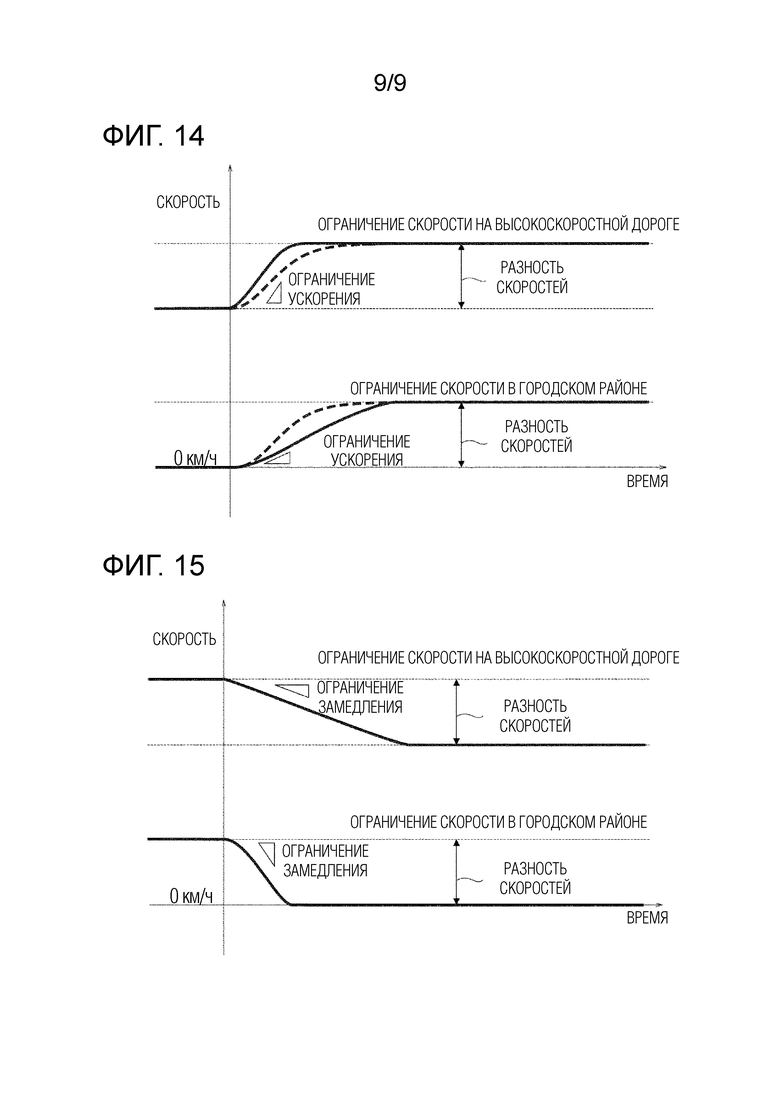
Фиг.14 - временная диаграмма, показывающая характеристики скорости, полученные из ускорения при соединении пригородной дороги с высокоскоростной дорогой, и характеристики скорости, полученные из ускорения при начале движения из состояния стоянки на дороге в городском районе, в первом варианте осуществления; и
Фиг.15 - временная диаграмма, показывающая характеристики скорости, полученные из замедления при соединении высокоскоростной дороги с пригородной ой и характеристики скорости, полученные из замедления во время остановки из движения с малой скоростью по дороге в городском районе, в первом варианте осуществления.
Осуществление изобретения
[0009] Предпочтительный вариант осуществления для реализации способа и устройства формирования целевой скорости транспортного средства для транспортного средства с помощью при вождении согласно настоящему изобретению описан ниже на основе первого варианта осуществления, показанного на чертежах.
[Первый вариант осуществления]
[0010] Сначала будет описана конфигурация. Способ и устройство формирования целевой скорости транспортного средства в первом варианте осуществления применяются в автономно управляемом транспортном средстве (один пример транспортного средства с помощью при вождении), в котором сформированная информация о целевом ускорении используется в управлении скоростью, а управление рулевым управлением/движением/торможением осуществляется автономно путем выбора режима автономного управления. Конфигурация в первом варианте осуществления описана ниже, и более конкретно она подразделяется на «Общую конфигурацию системы» и «Подробную конфигурацию блока формирования целевой скорости транспортного средства».
[Общая конфигурация системы]
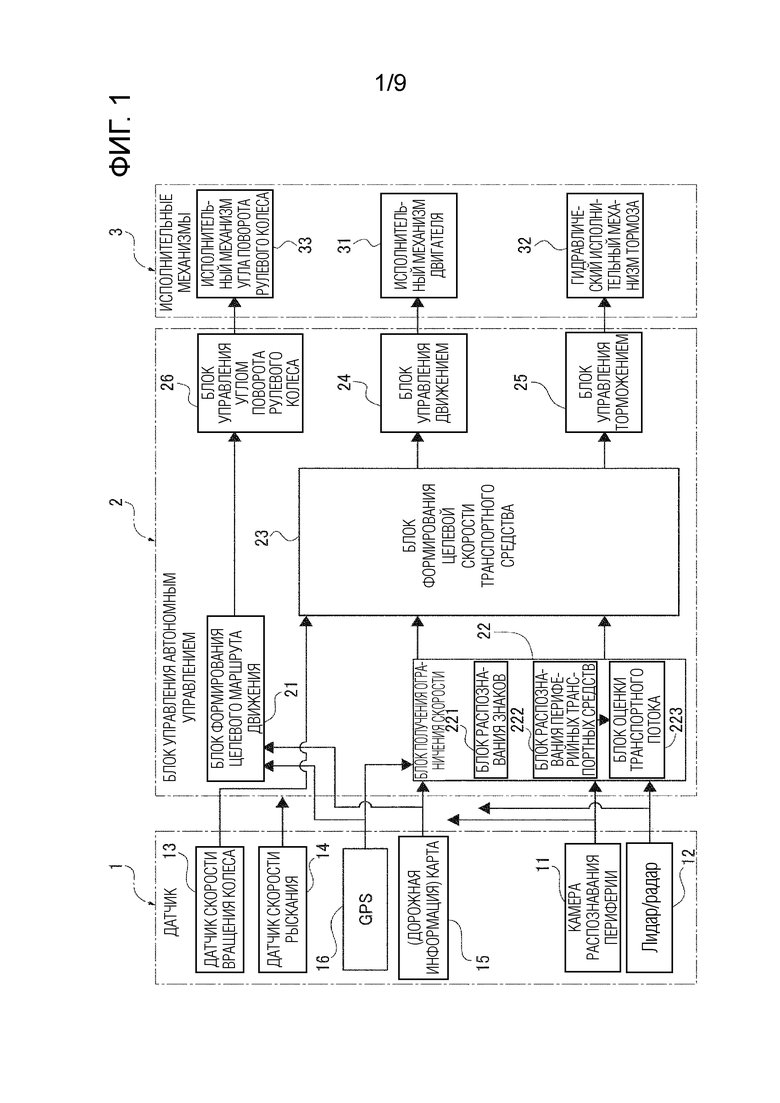
Фиг.1 - общая схема системы, показывающая систему управления автономным управлением, в которой применяются способ и устройство формирования целевой скорости транспортного средства в первом варианте осуществления. Общая конфигурация системы описана ниже на основе фиг. 1.
[0012] Система управления автономным движением содержит датчики 1, блок 2 управления автономным управлением и исполнительные механизмы 3, как показано на фиг.1. Блок 2 управления автономным управлением содержит ЦП или другое подобное устройство арифметической обработки и, кроме того, представляет собой компьютер, который выполняет арифметическую обработку.
[0013] Датчики 1 включают в себя камеру 11 распознавания периферии, лидар/радар 12, датчик 13 скорости вращения колеса, датчик 14 скорости рыскания, карту 15 и GPS 16.
Камера 11 распознавания периферии представляет собой, например, бортовое устройство формирования изображения, содержащее ПЗС-матрицу или другой элемент формирования изображения, причем камера 11 распознавания периферии установлена в заданном положении на транспортном средстве-носителе и захватывает изображения объектов на периферии транспортного средства-носителя. Камера 11 распознавания периферии обнаруживает препятствия на пути движения транспортного средства-носителя, препятствия, которые находятся за пределами маршрута движения транспортного средства-носителя (дорожные конструкции, движущиеся впереди транспортные средства, движущиеся сзади транспортные средства, встречные транспортные средства, периферийные транспортные средства, пешеходы, велосипеды и мотоциклы), маршрут движения транспортного средства-носителя (белые линии дорожной разметки, границы дорог, линии остановки, пешеходные переходы), дорожные знаки (ограничения скорости транспортного средства) и т.п. Множество бортовых камер может быть объединено для формирования камеры 11 распознавания периферии.
[0015] Лидар/радар 12 является датчиком измерения расстояния, и для этого может быть использован любой тип датчика измерения расстояния, который известен на момент подачи заявки, такой как лазерный радар, радар миллиметрового диапазона, ультразвуковой радар или лазерный дальномер. Лидар/радар 12 обнаруживает препятствия на маршруте движения транспортного средства-носителя, препятствия, которые находятся за пределами маршрута движения транспортного средства-носителя (дорожные конструкции, движущиеся впереди транспортные средства, движущиеся сзади транспортные средства, встречные транспортные средства, периферийные транспортные средства, пешеходы, велосипеды и мотоциклы) и т.п. Если угол обзора недостаточен, транспортное средство может быть оснащено множеством блоков. Лидар (датчик измерения расстояния, который излучает свет) и радар (датчик дальности, который излучает электромагнитные волны) также могут быть объединены.
[0016] Датчик 13 скорости вращения колеса предусмотрен для каждого из четырех колес. Датчики 13 скорости вращения колеса обнаруживают скорость вращения каждого колеса. Среднее значение скорости вращения левого и правого ведущих колес используется в качестве обнаруженного значения скорости транспортного средства в текущий момент времени.
[0017] Датчик 14 скорости рыскания представляет собой датчик ориентации, который обнаруживает скорость рыскания транспортного средства (угловую скорость вращения вокруг вертикальной оси, проходящей через центр тяжести транспортного средства). Датчики ориентации включают в себя гироскопические датчики, которые могут обнаруживать угол наклона, угол рыскания и угол крена транспортного средства.
[0018] Карта 15 представляет собой так называемую цифровую карту, и представляет собой информацию, которая связывает широту/долготу и картографическую информацию. Карта 15 включает в себя дорожную информацию, которая связана с соответствующими точками. Дорожная информация определяется узлами и участками, которые соединяют узлы между собой. Дорожная информация включает в себя информацию, которая указывает дороги в соответствии с положением/областью дороги, и информацию, указывающую тип каждой дороги, ширину каждой дороги и геометрическую форму дороги. Положение перекрестков, направления приближения к перекресткам, типы перекрестков и другая информация, относящаяся к перекресткам, сохраняются вместе с соответствующей идентификационной информацией для каждого участка дороги в дорожной информации. Тип дороги, ширина дороги, геометрическая форма дороги, разрешено ли движение вперед, отношения приоритетности, разрешен ли проезд (разрешен ли въезд на соседнюю полосу движения), ограничение скорости транспортного средства и другая информация, относящаяся к дорогам, также сохраняются в дорожной информации в связи с соответствующей идентификационной информацией для каждого участка дороги.
[0019] GPS 16 (сокращение от «глобальная система определения местоположения») обнаруживает положение движения (широту и долготу) транспортного средства-носителя во время движения.
[0020] Блок 2 управления автономным управлением содержит блок 21 формирования целевого маршрута движения, блок 22 получения информации об ограничениях скорости, блок 23 формирования целевой скорости транспортного средства, блок 24 управления движением, блок 25 управления торможением и блок 26 управления углом поворота рулевого колеса.
[0021] Блок 21 формирования целевого маршрута движения принимает информацию от камеры 11 распознавания периферии, лидара/радара 12; карты 15 и GPS 16 в качестве входных данных и формирует целевой маршрут движения транспортного средства-носителя.
[0022] Блок 22 получения информации об ограничениях скорости принимает информацию от камеры 11 распознавания периферии, лидара/радара 12, карты 15 и GPS 16 в качестве входных данных и получает информацию об ограничениях скорости. Блок 22 получения информации об ограничениях скорости имеет модуль 221 распознавания знаков для распознавания знаков ограничения скорости, блок 222 распознавания периферийных транспортных средств для распознавания транспортных средств на периферии транспортного средства-носителя и блок 223 оценки транспортного потока для оценки транспортного потока в соответствии со скоростью движения транспортного средства на периферии транспортного средства-носителя.
[0023] Информация об ограничениях скорости в отношении дороги, по которой движется транспортное средство-носитель, получается посредством следующих этапов (a1) - (d1).
(a1) Ограничение скорости по умолчанию, полученное путем распознавания дорожного знака блоком 221 распознавания знаков, получается в качестве ограничения скорости.
(b1) Ограничение скорости по умолчанию, полученное с использованием предшествующей информации из картографических данных, получается в качестве ограничения скорости.
(c1) Когда невозможно получить ограничение скорости по дорожным знакам или из картографических данных, блок 223 оценки транспортного потока оценивает транспортный поток на основании множества элементов информации о положении периферийных транспортных средств, полученных из блока 222 распознавания периферийных транспортных средств. Скорость, определяемая как скорость, с которой возможно движение без значительного отклонения от транспортного потока, на основании оцененного транспортного потока, получается в качестве ограничение скорости.
(d1) Когда множество ограничений скорости одновременно получено из дорожных знаков и из картографических данных, самое низкое значение из множества ограничений скорости выбирается в качестве ограничения скорости.
[0024] Блок 23 формирования целевой скорости транспортного средства принимает информацию об ограничении скорости из блока 22 получения информации об ограничениях скорости и информацию о скорости от датчиков 13 скорости колеса в качестве входных данных и формирует целевую скорость транспортного средства для транспортного средства-носителя. В «блоке 23 формирования целевой скорости транспортного средства» целевая скорость транспортного средства формируется в соответствии с фактической скоростью транспортного средства-носителя и ограничением скорости для дороги, по которой движется транспортное средство-носитель, и формируются целевое ускорение и целевое замедление.
[0025] Блок 24 управления движением принимает в качестве входных данных целевую скорость транспортного средства и целевое ускорение от блока 23 формирования целевой скорости транспортного средства, получает значение команды управления движением в соответствии с сервоуправлением скоростью и выводит результат получения в исполнительный механизм 31 двигателя.
[0026] Блок 25 управления торможением принимает в качестве входных данных целевую скорость транспортного средства и целевое замедление от блока 23 формирования целевой скорости транспортного средства, получает значение команды управления торможением в соответствии с сервоуправлением скоростью и выводит результат получения в гидравлический исполнительный механизм 32 тормоза.
[0027] В качестве способа получения значения команды управления с использованием сервоуправления скоростью транспортного средства выполняется, например, управление с прямой связью+управление с обратной связью, которое объединяет управление с прямой связью, которое соответствует целевой скорости ускорения/замедления, и управление с обратной связью, которое соответствует разности между целевой скоростью транспортного средства и текущей скоростью транспортного средства. Отклонение от целевого значения из-за уклонов дороги или тому подобного также следует принимать во внимание, когда это выполняется.
[0028] Блок 26 управления углом поворота рулевого колеса принимает в качестве входных данных информацию целевого маршрута движения от блока 21 формирования целевого маршрута движения и определяет целевой угол поворота, чтобы транспортное средство-носитель следовало целевому маршруту движения транспортного средства-носителя. Блок 26 управления углом поворота рулевого колеса также получает значение команды управления углом поворота рулевого колеса таким образом, чтобы фактический угол поворота рулевого колеса совпадал с целевым углом поворота рулевого колеса, и выводит результат получения в исполнительный механизм 33 угла поворота рулевого колеса.
[0029] Исполнительные механизмы 3 включают в себя исполнительный механизм 31 двигателя, гидравлический исполнительный механизм 32 тормоза и исполнительный механизм 33 угла поворота рулевого колеса.
[0030] Исполнительный механизм 31 двигателя является исполнительным механизмом, который принимает в качестве входного сигнала значение команды управления движением от блока 24 управления движением и управляет движущей силой двигателя. В случае гибридного транспортного средства могут вместе использоваться исполнительный механизм двигателя и исполнительный механизм мотора. В случае электрического автономного транспортного средства может использоваться исполнительный механизм мотора.
[0031] Гидравлический исполнительный механизм 32 тормоза является гидравлическим усилителем, который принимает в качестве входного сигнала значение команды управления торможением от блока 25 управления торможением и управляет силой торможения гидравлики тормоза. В случае транспортного средства с электроприводом, не оборудованного гидравлическим усилителем, может использоваться электрический усилитель.
[0032] Исполнительный механизм 33 угла поворота рулевого колеса представляет собой мотор для управления углом поворота рулевого колеса, который принимает в качестве входного сигнала значение команды управления углом поворота рулевого колеса от блока 26 управления углом поворота рулевого колеса и управляет углом поворота рулевого колеса.
[0033] [Подробная конфигурация блока формирования целевой скорости транспортного средства]
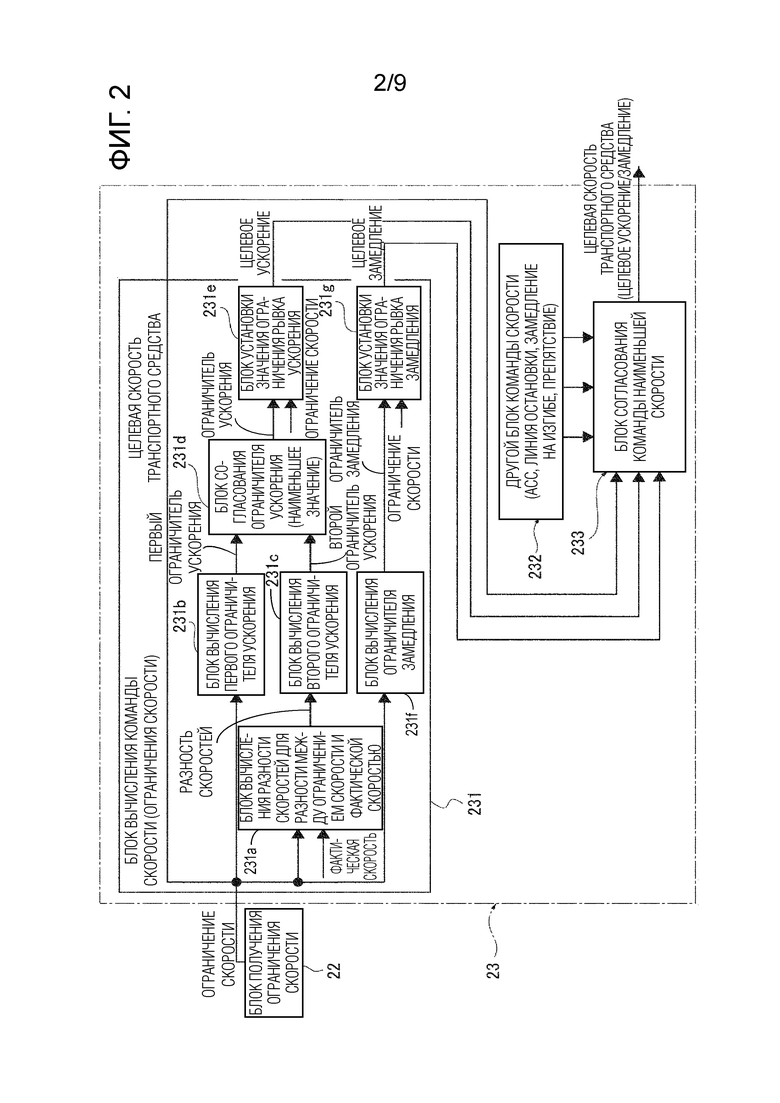
На фиг.2 показана подробная конфигурация блока 23 формирования целевой скорости транспортного средства в устройстве формирования целевой скорости транспортного средства в первом варианте осуществления. Подробная конфигурация блока 23 формирования целевой скорости транспортного средства, предусмотренного в блоке 2 управления автономным управлением, описана ниже на основании фиг.2.
[0034] Блок 23 формирования целевой скорости транспортного средства содержит блок 231 вычисления команд скорости (ограничение скорости), другой блок 232 вычисления команд скорости и блок 233 согласования команд наименьшей скорости, как показано на фиг.2.
[0035] Блок 231 вычисления команд скорости принимает в качестве входных данных ограничение скорости от блока 22 получения ограничения скорости и фактическую скорость от датчиков 13 скорости вращения колеса и формирует целевую скорость транспортного средства (равную ограничению скорости), целевое ускорение и целевое замедление. В частности, когда ограничение скорости выбрано в качестве окончательной целевой скорости транспортного средства, ограничение скорости, полученное из фиксированного значения, устанавливается в качестве целевой скорости транспортного средства, в то время как ограничение скорости для дороги, по которой движется транспортное средство-носитель, не изменяется, и оба из целевого ускорения и целевого замедления устанавливаются равными нулю. Однако в переходный период, в течение которого ограничение скорости переходит от низкой скорости к высокой скорости, формируется целевое ускорение и наоборот, в переходный период, в течение которого ограничение скорости переходит от высокой скорости к низкой скорости, формируется целевое замедление. Кроме того, когда окончательная целевая скорость транспортного средства переключилась с целевой скорости транспортного средства, полученной из категории, отличной от ограничения скорости, на целевую скорость транспортного средства, полученную из ограничения скорости, в переходный период, в течение которого целевая скорость транспортного средства увеличивается, формируется целевое ускорение и, наоборот, в переходный период, в течение которого целевая скорость транспортного средства уменьшается, формируется целевое замедление.
[0036] Блок 231 вычисления команд скорости имеет блок 231a вычисления разности скоростей, который вычисляет разность между ограничением скорости и фактической скоростью, блок 231b вычисления первого ограничителя ускорения, блок 231c вычисления второго ограничителя ускорения, блок 231d согласования ограничителя ускорения, блок 231e установки значения ограничения рывка ускорения, блок 231f вычисления ограничителя замедления и блок 231g установки значения ограничения рывка замедления.
[0037] Блок 231a вычисления разности скоростей вычисляет разность скоростей между ограничением скорости и скоростью транспортного средства-носителя.
[0038] Блок 231b вычисления первого ограничителя ускорения (блок установки значения ограничения ускорения) устанавливает первый ограничитель ускорения (первое значение ограничения ускорения) таким образом, чтобы оно увеличивалось в направлении ослабления ограничения ускорения в соответствии с увеличением ограничения скорости, когда целевое ускорение формируется на основании ограничения скорости. В частности, когда первый ограничитель ускорения является высоким, формируется целевое ускорение, имеющее крутой градиент увеличения скорости транспортного средства, и когда первый ограничитель ускорения является низким, формируется целевое ускорение, имеющее плавный градиент увеличения скорости транспортного средства.
[0039] Блок 231c вычисления второго ограничителя ускорения (блок установки значения ограничения ускорения) устанавливает второй ограничитель ускорения (второе значение ограничения ускорения) таким образом, чтобы оно увеличивалось в направлении ослабления ограничения ускорения в соответствии с увеличением разности скоростей из блока 231а вычисления разности скоростей. В частности, когда разность скоростей высока, формируется целевое ускорение, имеющее крутой градиент увеличения скорости транспортного средства, и когда разность скоростей является низкой, формируется целевое ускорение, имеющее плавный градиент увеличения скорости транспортного средства.
[0040] Блок 231d согласования ограничителя ускорения выбирает один из первого ограничителя ускорения из блока 231b вычисления первого ограничителя ускорения и второго ограничителя ускорения из блока 231c вычисления второго ограничителя ускорения, конкретно выбирая тот из ограничителей ускорения, который является более низким. Затем блок 231d согласования ограничителя ускорения устанавливает значение ограничителя, выбранное в соответствии с выбором наименьшего значения, в качестве окончательного ограничителя ускорения (значения ограничения ускорения).
[0041] Блок 231e установки значения ограничения рывка ускорения устанавливает значение ограничения рывка ускорения таким образом, чтобы оно увеличивалось в направлении ослабления ограничения рывка ускорения в соответствии с увеличением ограничения скорости. Блок 231e установки значения ограничения рывка ускорения принимает в качестве входных данных ограничитель ускорения (значение ограничения ускорения) от блока 231d согласования ограничителя ускорения и выводит в качестве целевого ускорения такое значение, при котором подавляется изменение ускорения во времени (рывок ускорения) для ограничителя ускорения.
[0042] Блок 231f вычисления ограничителя замедления (блок установки значения ограничения замедления) устанавливает ограничитель замедления (значение ограничения замедления) таким образом, чтобы оно увеличивалось в направлении ослабления ограничения замедления в соответствии с уменьшением ограничения скорости. В частности, когда ограничитель замедления является высоким, формируется целевое замедление, имеющее крутой градиент снижения скорости транспортного средства, а когда ограничитель замедления является низким, формируется целевое замедление, имеющее плавный градиент снижения скорости транспортного средства.
[0043] Блок 231g установки значения ограничения рывка замедления устанавливает значение ограничения рывка замедления таким образом, чтобы оно увеличивалось в направлении ослабления ограничения рывка замедления в соответствии с уменьшением ограничения скорости. Блок 231g установки значения ограничения рывка замедления принимает в качестве входных данных ограничитель замедления (значение ограничения замедления) от блока 231f вычисления ограничителя замедления и выводит в качестве целевого замедления такое значение, при котором подавляется изменение замедления во времени (рывок замедления) для ограничителя замедления.
[0044] Другой блок 232 вычисления команд скорости вычисляет значение команды скорости, отличное в плане категории от значения блока 231 вычисления команд скорости (ограничение скорости). Например, другой блок 232 вычисления команд скорости создает профиль скорости, соответствующий адаптивному круиз-контролю (ACC), на основе ACC и вычисляет значение команды скорости (ACC) в соответствии с созданным профилем скорости. В качестве другого примера, другой блок 232 вычисления команд скорости создает профиль скорости, соответствующий линии остановки, на основании линии остановки перед транспортным средством-носителем и вычисляет значение команды скорости (линия остановки) в соответствии с созданным профилем скорости. В качестве еще одного примера, другой блок 232 вычисления команд скорости создает профиль скорости, соответствующий замедлению на повороте, на основании крутого изгиба перед транспортным средством-носителем и вычисляет значение команды скорости (замедление на повороте) в соответствии с созданным профилем скорости. В качестве другого примера, другой блок 232 вычисления команд скорости создает профиль скорости, соответствующий препятствию, на основании препятствия, присутствующего на маршруте движения транспортного средства-носителя, и вычисляет значение команды скорости (препятствие) в соответствии с созданным профилем скорости.
[0045] Блок 233 согласования команды наименьшей скорости выбирает в качестве целевой скорости транспортного средства наименьшее значение из множества значений команд скорости, вычисленных блоком 231 вычисления команд скорости и другим блоком 232 вычисления команд скорости. В дополнение к выбору наименьшего значения в качестве целевой скорости транспортного средства блок 233 согласования команды наименьшей скорости одновременно выбирает целевое ускорение/замедление, которое соответствует типу выбранной целевой скорости транспортного средства. В частности, когда блоком 233 согласования команды наименьшей скорости выбирается значение команды скорости, вычисленное блоком 231 вычисления команд скорости (ограничение скорости) , целевая скорость транспортного средства (ограничение скорости) и целевое ускорение/замедление формируются на основании ограничения скорости для дороги, по которой движется транспортное средство-носитель.
[0046] Ниже описана работа изобретения. Ниже описана работа в первом варианте осуществления, и описание конкретно разделено на «Работу для процесса управления характеристиками ускорения», «Работу для процесса управления характеристиками замедления», «Проблему в сравнительном примере», «Работу для управления характеристиками ускорения», и «Работу для управления характеристиками торможения».
[0047] [Работа для процесса управления характеристиками ускорения]
На фиг.3 показана последовательность операций процесса управления характеристиками ускорения, выполняемого блоком 2 управления автономным управлением в первом варианте осуществления. На фиг.4 показана последовательность операций процесса установки ограничения скорости на этапе S2 блок-схемы по фиг.3. На фиг.5 показана последовательность операций процесса установки ограничения ускорения на этапе S3 блок-схемы по фиг.3. Работа для процесса управления характеристиками ускорения описана ниже на основе фиг. 3-8.
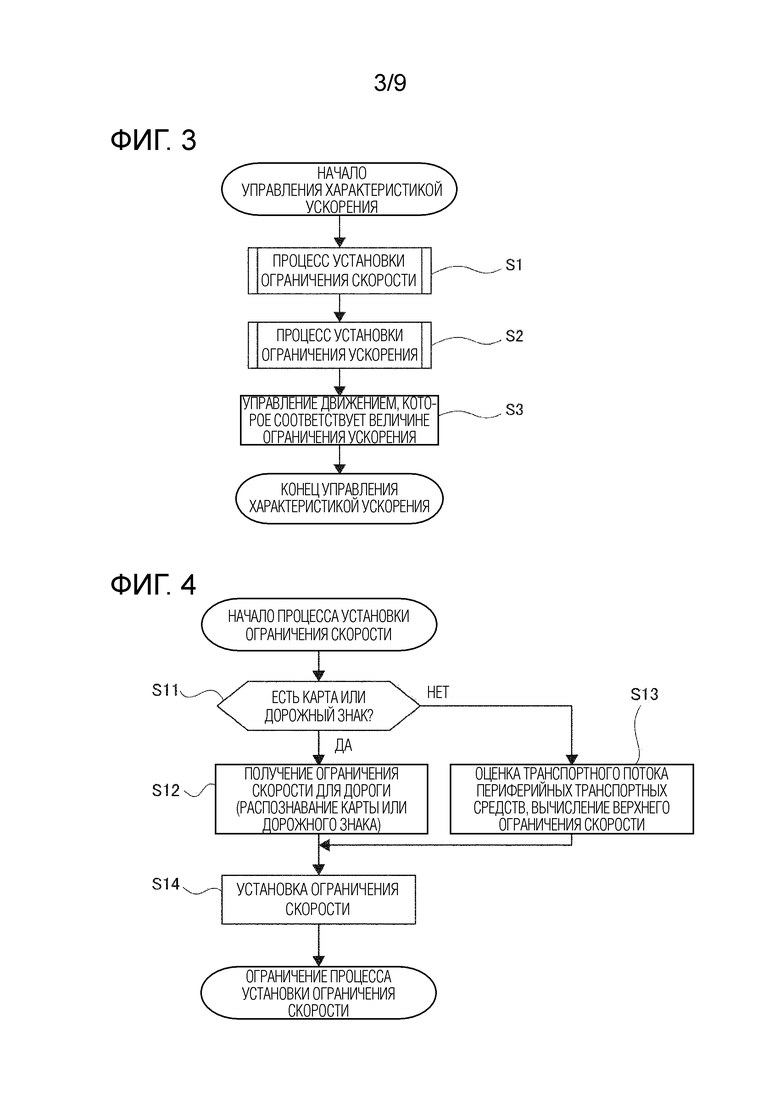
[0048] Ниже описаны этапы, показанные на фиг.3. После инициирования управления характеристикой ускорения на этапе S1 выполняется процесс установки ограничения скорости (фиг. 4), и процесс переходит к этапу S2. На этапе 2 после установки на этапе S1 ограничения скорости выполняется процесс установки ограничения ускорения (фиг. 5), и процесс переходит к этапу S3. На этапе S3 после установки ограничения ускорения на этапе S2 выполняется управление движением, которое соответствует величине ограничения ускорения, и управление характеристикой ускорения прекращается.
[0049] Таким образом, при управлении характеристикой ускорения, когда ограничение скорости для дороги, по которой движется транспортное средство-носитель, увеличивается, вслед за процессом установки ограничения скорости (фиг. 4) выполняется процесс установки ограничения ускорения (фиг. 5) на основании ограничения скорости, и формируется целевое ускорение. Когда ограничение скорости для дороги, по которой движется транспортное средство-носитель, увеличивается, выполняется управление движением для получения сформированного целевого ускорения, в результате чего достигается ускоренное движение, полученное из характеристик ускорения, которые ограничены на основании ограничения скорости.
[0050] Ниже описана работа для процесса установки ограничения скорости на этапе S1, показанном на фиг.3, который выполняется блоком 22 получения информации об ограничении скорости, согласно блок-схеме, показанной на фиг.4.
[0051] На этапе S11 после начала процесса установки ограничения скорости определяется, имеется ли карта или знак, из которого можно получить ограничение скорости. Если ДА (есть карта или знак), процесс переходит к этапу S12; если НЕТ (нет карты или знака), процесс переходит к этапу S13.
[0052] На этапе S12, исходя из определения на этапе S11, что имеется карта или знак, из карты или знака получается ограничение скорости для дороги, по которой движется транспортное средство-носитель, , и процесс переходит к этапу S14.
[0053] На этапе S13, исходя из определения на этапе S11, что нет карты или знака, оценивается транспортный поток периферийных транспортных средств, вычисляется верхнее ограничение скорости, с которой транспортное средство-носитель может двигаться вместе с транспортным потоком, и процесс переходит к этапу S14.
[0054] На этапе S14, после получения на этапе S12 ограничения скорости или после вычисления на этапе S13 верхнего ограничения скорости устанавливается ограничение скорости для дороги, по которой движется транспортное средство-носитель, и процесс установки ограничения скорости завершается. Если на этапе S12 получены два ограничения скорости из карты и знака, в качестве ограничения скорости устанавливается самая низкая скорость. Когда верхнее ограничение скорости вычисляется на этапе S13, верхнее ограничение скорости используется в качестве ограничения скорости.
[0055] Таким образом, при получении ограничения скорости, если ограничение скорости получается из карты или знака, полученное ограничение скорости используется в неизмененном состоянии в качестве информации об ограничении скорости. Если на карте или знаке не установлено ограничение скорости, оценивается транспортный поток периферийных транспортных средств, а верхнее ограничение скорости, вычисленное как скорость, с которой транспортное средство может двигаться вместе с транспортным потоком, используется в качестве информации об ограничении скорости. Когда из карты и знака получены два ограничения скорости, в качестве информации об ограничении скорости используется самая низкая скорость в соответствии с выбором.
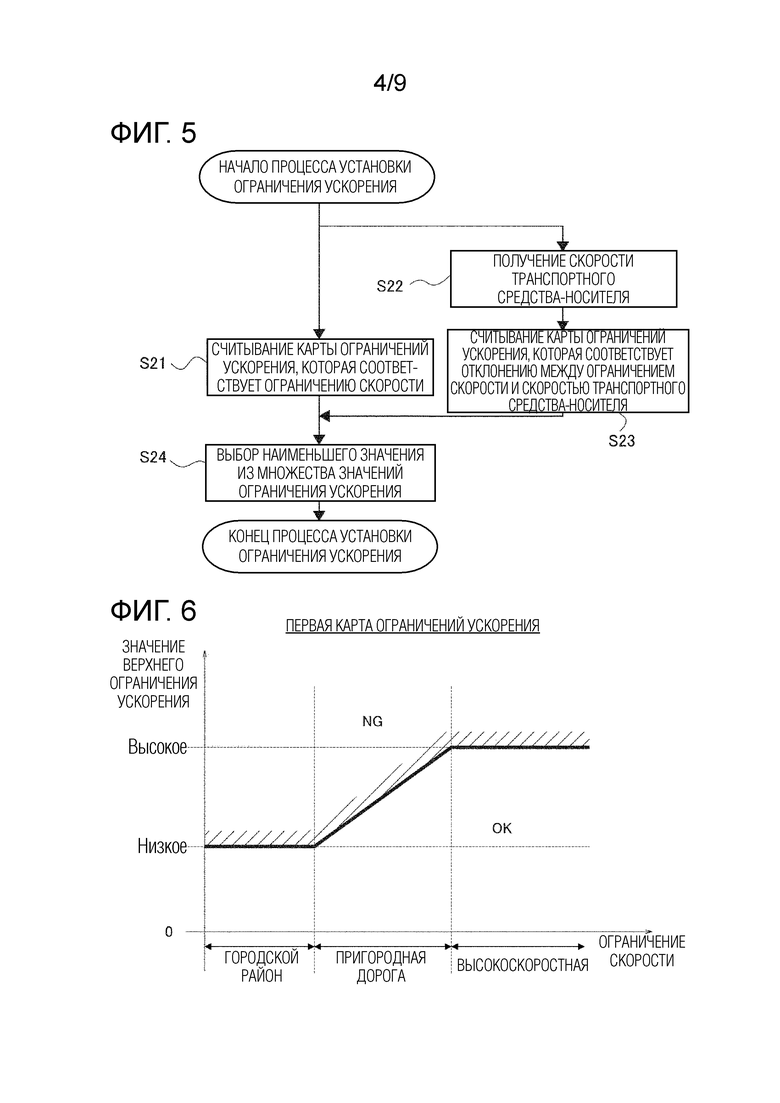
[0056] Процесс установки ограничения ускорения на этапе S2, показанном на фиг.3, который выполняется блоком 231a вычисления разности скоростей, блоком 231b вычисления первого ограничителя ускорения, блоком 231c вычисления второго ограничителя ускорения и блоком 231d согласования ограничителя ускорения, описан ниже в соответствии с блок-схемой, показанной на фиг.5.
[0057] На этапе S21 после начала процесса установки ограничения ускорения считывается первая карта ограничения ускорения, показанная на фиг.6, значение верхнего ограничения ускорения, которое соответствует ограничению скорости, определяется с использованием первой карты ограничения ускорения, и процесс переходит к этапу S24. На первой карте ограничения ускорения, как показано на фиг. 6, значение верхнего ограничения ускорения установлено на низкое значение во время движения по городским районам, имеющим низкие ограничения скорости, и установлено на высокое значение во время движения по скоростным дорогам, имеющим высокие ограничения скорости. Во время движения по пригородным дорогам, на которых ограничение скорости изменяется с низкой скорости на высокую скорость, верхнее ограничение ускорения устанавливается равным переменному значению, связывающему низкое значение и высокое значение.
[0058] На этапе S22, после начала процесса установки ограничения ускорения, получается скорость транспортного средства-носителя, и процесс переходит к этапу S23.
[0059] На этапе S23, после получения на этапе S22 скорости транспортного средства-носителя, считывается вторая карта ограничения ускорения, показанная на фиг. 8, вычисляется отклонение (разность в скорости) между ограничением скорости и скоростью транспортного средства-носителя, значение ограничения ускорения определяется в соответствии с разностью скоростей с использованием второй карты ограничения ускорения, и процесс переходит к этапу S24. Разность скоростей Vdif вычисляется в соответствии с формулой, в которой скорость Vsense транспортного средства-носителя вычитается из ограничения скорости Vlim (то есть Vdif=Vlim - Vsense), как показано на фиг. 7. Во второй карте ограничений ускорения, как показано на фиг. 8, значение ограничения ускорения установлено на высокое значение в области, в которой разность скоростей Vdif велика, и установлено на низкое значение в области, в которой разность скоростей Vdif мала. В области перехода из области, имеющей большую разность скоростей Vdif, в область, имеющую низкую разность скоростей Vdif, значение ограничения ускорения устанавливается равным переменному значению, связывающему высокое значение и низкое значение.
[0060] На этапе S24, после этапа S21 и этапа S23, выбирается самое низкое значение из множества значений ограничения ускорения, значение, полученное посредством выбора наименьшего значения, используется в качестве окончательного значения ограничения ускорения, и процесс ограничения ускорения завершен.
[0061] Таким образом, при управлении для ограничения верхнего ограничения ускорения значение, полученное путем выбора наименьшего значения из числа верхнего ограничения ускорения, определенного в соответствии с ограничением скорости, и значения ограничения ускорения, определенного в соответствии с разностью скорости Vdif, используется в качестве окончательного значения ограничения ускорения.
[0062] Соответственно, когда значение верхнего ограничения ускорения, определенное в соответствии с ограничением скорости, используется в качестве окончательного значения ограничения ускорения, ускорение ограничивается следующим образом в соответствии с первой картой ограничения ускорения, показанной на фиг.6.
(a2) Во время движения в городских районах, имеющих низкие ограничения скорости, ускорение строго ограничено.
(b2) Во время движения по скоростным дорогам, имеющим высокие ограничения скорости, ограничение ускорения ослабляется.
(c2) Во время движения по пригородным дорогам, имеющим промежуточные ограничения скорости, ограничение ускорения ослабляется в соответствии с увеличением ограничения скорости.
[0063] Когда значение ограничения ускорения, определенное в соответствии с разностью скоростей Vdif, используется в качестве окончательного значения ограничения ускорения, ускорение ограничивается следующим образом в соответствии со второй картой ограничения ускорения, показанной на фиг.8.
(a3) Когда разность скоростей Vdif мала, ускорение строго ограничено.
(b3) Когда разность скоростей Vdif велика, ограничение ускорения ослабляется.
(c3) Когда разность скоростей Vdif является промежуточной, ограничение ускорения ослабляется в соответствии с увеличением разности скоростей Vdif.
[Работа для процесса управления характеристиками замедления]
[0064] На фиг.9 показана последовательность операций процесса управления характеристикой замедления, выполняемого блоком 2 управления автономным управлением в первом варианте осуществления. На фиг. 10 показана последовательность операций процесса установки ограничения замедления на этапе S5 блок-схемы по фиг. 9. Работа для процесса управления характеристикой торможения описана ниже со ссылкой на фиг. 9-11.
[0065] Этапы, показанные на фиг. 9, описаны ниже. После инициирования управления характеристикой замедления на этапе S4 выполняется процесс установки ограничения скорости (фиг. 4), и процесс переходит к этапу S5. На этапе S5, после установки ограничения скорости на этапе S4, выполняется процесс установки ограничения замедления (фиг.10), и процесс переходит к этапу S6. На этапе S6, после установки ограничения замедления на этапе S5, выполняется управление торможением, которое соответствует величине ограничения замедления, и управление характеристикой замедления прекращается.
[0066] Процесс установки ограничения скорости на этапе S4, показанном на фиг.9, который выполняется блоком 22 получения информации об ограничении скорости, выполняется в соответствии с блок-схемой по фиг.4, в отношении работы для процесса управления характеристикой ускорения и, следовательно, описание процесса установки ограничения скорости здесь не приводится.
[0067] Работа для процесса установки ограничения замедления на этапе S5, показанном на фиг. 9, который выполняется блоком 231f вычисления ограничителя замедления, описана в соответствии с блок-схемой по фиг. 10.
[0068] На этапе S51 при инициировании процесса установки ограничения замедления считывается карта ограничения замедления, показанная на фиг. 11, значение ограничения замедления, которое соответствует ограничению скорости, определяется с использованием карты ограничения замедления, и процесс установки ограничения замедления прекращается. На карте ограничения замедления, как показано на фиг. 11, значение ограничения замедления установлено на высокое значение для обеспечения возможности интенсивного замедления во время движения в городских районах, имеющих низкие ограничения скорости, и установлено на низкое значение для ограничения небольшим замедлением во время движения по скоростным дорогам, имеющим высокие ограничения скорости. Во время движения по пригородным дорогам, где ограничение скорости изменяется с низкой скорости на высокую скорость, значение ограничения замедления устанавливается равным переменному значению, связывающему высокое значение и низкое значение.
[0069] Таким образом, в управлении для ограничения верхнего ограничения замедления используется значение ограничения замедления, определенное в соответствии с ограничением скорости.
[0070] Соответственно, замедление ограничено следующим образом в соответствии с картой ограничений замедления, показанной на фиг. 11.
(a4) Во время движения по городским районам, имеющим низкие ограничения скорости, ограничение замедления ослабляется.
(b4) Во время движения по скоростным дорогам, имеющим высокие ограничения скорости, замедление строго ограничено.
(c4) Во время движения по пригородным дорогам, имеющим промежуточные ограничения скорости, ограничение замедления становится более строгим в соответствии с увеличением ограничения скорости.
[0071] [Проблема в сравнительном примере]
На фиг. 12 показана операция соединения в отношении маршрута, соединяющего обычную дорогу с высокоскоростной дорогой, а на фиг. 13 показаны характеристики скорости, полученные из ускорения при соединении пригородной дороги с высокоскоростной дорогой, и характеристики скорости, полученные из ускорения при начале движения из состояния остановки на дороге в городском районе в сравнительном примере. Проблема в сравнительном примере описана ниже на основе фиг.12 и 13.
[0072] Во-первых, в сравнительном примере ограничение ускорения устанавливается в соответствии с отклонением (разностью скоростей) между ограничением скорости и скоростью транспортного средства-носителя.
[0073] В этом сравнительном примере рассматривается только разность скоростей между ограничением скорости и скоростью транспортного средства-носителя, а не фактическое ограничение скорости для дороги, по которой движется транспортное средство-носитель. Следовательно, проблема заключается в том, что трудно достичь подходящего ощущения ускорения как при движении по скоростным дорогам с высокими ограничениями скорости, так и при движении по городским районам с низкими ограничениями скорости.
[0074] В частности, как показано на фиг. 13, одинаковое ускорение (градиент увеличения скорости) устанавливается в случаях, когда разности скорости между ограничением скорости и скоростью транспортного средства-носителя одинаковы. Поэтому, когда установлено ускорение, подходящее для движения по скоростным дорогам, имеющим высокие ограничения скорости, ускорение будет чрезмерным для движения по городским районам, и у пассажира будут возникать неприятные ощущения, а транспортный поток будет нарушен. И наоборот, когда установлено ускорение, подходящее для движения по городским районам с низкими ограничениями скорости, ускорение будет недостаточным при движении по скоростным дорогам, и у пассажира будут возникать неприятные ощущения, а транспортный поток будет нарушен.
[0075] В частности, когда ускорение является чрезмерным при движении в городских районах, ускоряется только транспортное средство-носитель, в то время как транспортные средства на периферии транспортного средства-носителя движутся по существу с постоянной скоростью, и транспортный поток в городском районе нарушается. В случае транспортного средства с помощью при вождении, такого как транспортное средство с автономным управлением, пассажир намеревается двигаться вместе с транспортным потоком и не предполагает, что ускоряется только транспортное средство-носитель, и поэтому пассажир будет испытывать неприятные ощущения.
[0076] Когда ускорение является недостаточным во время движения по скоростным дорогам, во время соединения на маршруте, соединяющем обычную дорогу с высокоскоростной дорогой, как показано на фиг. 12, основное транспортное средство приближается с низкой скоростью, в то время как транспортные средства, движущиеся по скоростной дороге, движутся на высоких скоростях, и транспортное средство-носитель не может выехать на скоростную дорогу. В случае транспортного средства с помощью при вождении, такого как транспортное средство с автономным управлением, пассажир намерен плавно влиться в транспортный поток на скоростной дороге и не намерен ждать возможности влиться в поток, и поэтому пассажир будет испытывать неприятные ощущения.
[0077] [Работа для управления характеристикой ускорения]
На фиг.14 показаны характеристики скорости, полученные из ускорения при соединении пригородной дороги с высокоскоростной дорогой, и характеристики скорости, полученные из ускорения при начале движения из состояния остановки на дороге в городском районе, в первом варианте осуществления. Работа для управления характеристикой ускорения описана ниже на основе фиг.14.
[0078] Во время перехода от пригородной дороги к высокоскоростной дороге в первом варианте осуществления ограничение ускорения ослабляется из-за движения по высокоскоростной дороге, имеющей высокое ограничение скорости. В частности, из-за высокого ограничения скорости характеристики ускорения (характеристики градиента увеличения скорости) устанавливаются более резкими, чем в сравнительном примере (характеристика, показанная пунктирными линиями), как показано в верхней части фиг.14.
[0079] Следовательно, при переходе с пригородной дороги на высокоскоростную дорогу скорость транспортного средства-носителя быстро возрастает по отношению к скорости других транспортных средств, движущихся по высокоскоростной дороге, и транспортное средство-носитель может плавно влиться в транспортный поток на высокоскоростной дороге. Поскольку при выезде на скоростную дорогу обеспечивается движение с промежуточным ускорением , как задумано пассажиром, пассажир не будет испытывать неприятных ощущений.
[0080] При начале движения из состояния остановки на дороге в городском районе в первом варианте осуществления ограничение ускорения усиливается из-за движения в городском районе, имеющем низкое ограничение скорости. В частности, из-за низкого ограничения скорости характеристики ускорения (характеристики градиента увеличения скорости) устанавливаются более мягкими, чем в сравнительном примере (характеристика, показанная пунктирными линиями), как показано в нижней части фиг. 14.
[0081] Следовательно, во время начала движения из состояния остановки на дороге в городском районе скорость транспортного средства-носителя увеличивается постепенно, и транспортное средство-носитель может плавно вливаться в транспортный поток периферийных транспортных средств, которые движутся с по существу постоянной скоростью. Поскольку при начале движения на дороге в городском районе обеспечивается движение с плавным ускорением, как это задумано пассажиром, пассажир не будет испытывать неприятных ощущений.
[0082] [Работа по управлению характеристикой замедления]
На фиг.15 показаны скоростные характеристики, полученные из замедления при переходе с высокоскоростной дороги на пригородную дорогу, и скоростные характеристики, полученные из замедления при остановке из движения с низкой скоростью по дороге в городском районе, в первом варианте осуществления. Работа для управления характеристикой замедления описана ниже на основе фиг.15.
[0083] При переходе с высокоскоростной дороги на пригородную дорогу в первом варианте осуществления ограничение замедления усиливается, в отличие от ограничения ускорения, из-за движения по высокоскоростной дороге, имеющей высокое ограничение скорости. В частности, из-за высокого ограничения скорости на скоростной дороге характеристики замедления (характеристики снижения градиента скорости) устанавливаются мягкими, как показано в верхней части фиг. 15.
[0084] Следовательно, при переходе с высокоскоростной дороги на пригородную дорогу скорость транспортного средства-носителя снижается постепенно, и транспортное средство-носитель может осуществлять плавный переход, следуя за транспортным потоком периферийных транспортных средств на пригородной дороге. Поскольку при переходе с высокоскоростной дороги на пригородную дорогу обеспечивается движение с замедлением, при котором скорость плавно снижается, как это задумано пассажиром, пассажир не будет испытывать неприятных ощущений.
[0085] Во время остановки из движения на низкой скорости по дороге в городском районе в первом варианте осуществления ограничение замедления ослабляется, в отличие от ограничения ускорения, из-за движения в городском районе, имеющем низкое ограничение скорости. В частности, из-за низкого ограничения скорости в городском районе характеристики замедления (характеристики снижения градиента скорости) устанавливаются резкими, как показано в нижней части фиг. 15.
[0086] Следовательно, возможно быстрое замедление на дорогах в городских районах в случаях, когда ограничение скорости уменьшается, и упрощается активное обеспечение безопасности на дорогах с плохой видимостью или на дорогах с низкими ограничениями скорости, для которых существует вероятность неожиданного возникновения препятствий.
[0087] Эффекты изобретения описаны ниже. В способе и устройстве формирования целевой скорости транспортного средства для транспортного средства с помощью при вождении в первом варианте осуществления получаются эффекты, перечисленные ниже.
[0088] (1) Способ формирования целевой скорости транспортного средства для транспортного средства с помощью при вождении (транспортного средства с автономным управлением), причем способ включает в себя формирование целевой скорости транспортного средства для транспортного средства-носителя в соответствии с ограничением скорости на маршруте движения транспортного средства-носителя. Во время движения получают ограничение скорости на маршруте движения транспортного средства-носителя. Формируют целевое ускорение вместе с формированием целевой скорости транспортного средства в соответствии с ограничением скорости. При формировании целевого ускорения значение ограничения ускорения (ограничитель ускорения) устанавливается таким образом, чтобы оно увеличивалось в направлении ослабления ограничения ускорения в соответствии с увеличением ограничения скорости (блок 23 формирования целевой скорости транспортного средства; фиг. 6). Таким образом возможно обеспечение способа формирования целевой скорости транспортного средства для транспортного средства с помощью при вождении (транспортного средства с автономным управлением), в котором во время движения с помощью при вождении (с автономным управлением) пассажир не испытывает неприятных ощущений, а также предотвращается нарушение транспортных потоков в соответствии с различными дорогами, имеющими различные ограничения скорости. В частности, поскольку целевое ускорение формируется в соответствии с ограничением скорости, можно установить характеристики ускорения, которые соответствуют ограничению скорости для дороги, по которой движется транспортное средство-носитель. Кроме того, транспортное средство-носитель может двигаться без неприятных ощущений для пассажира и без нарушения транспортных потоков в соответствии с различными дорогами. Кроме того, поскольку значение ограничения ускорения (ограничитель ускорения) установлено таким образом, чтобы оно увеличивалось в направлении ослабления ограничения ускорения в соответствии с увеличением ограничения скорости, можно обеспечить различия в ощущениях ускорения и комфортности движения между моментами, когда ограничение скорости является высоким, и моментами, когда ограничение скорости является низким.
[0089] (2) При формировании целевого ускорения формируется целевое ускорение, имеющее резкий градиент увеличения скорости транспортного средства, когда значение ограничения ускорения (ограничитель ускорения) является высоким, и формируется целевое ускорение, имеющее плавный градиент увеличения скорости транспортного средства, когда значение ограничения ускорения (ограничитель ускорения) является низким (блок 231 вычисления команды скорости); фиг. 14). Таким образом, в дополнение к эффектам, указанным выше в (1), можно достичь как резкого ускорения для следования транспортному потоку при движении по высокоскоростной дороге, так и плавного ускорения для обеспечения ощущения безопасности при движения в городском районе.
[0090] (3) При формировании целевого ускорения устанавливается значение ограничения рывка ускорения таким образом, чтобы оно увеличивалось в направлении ослабления ограничения рывка ускорения, соответственно, с увеличением ограничения скорости (блок 231e установки значения ограничения рывка ускорения; фиг. 2). Таким образом, в дополнение к эффектам, указанным выше в (1) и (2), возможно плавное изменение ускорения во времени и достижение как ощущения ускорения, так и комфорта при движении путем ограничения рывка ускорения.
[0091] (4) При установке значения ограничения ускорения первое значение ограничения ускорения (первый ограничитель ускорения) устанавливается таким образом, чтобы оно увеличивалось в соответствии с увеличением ограничения скорости (блок 231b вычисления первого ограничителя ускорения), второе значение ограничения ускорения (второй ограничитель ускорения) устанавливается таким образом, чтобы оно увеличивалось в соответствии с увеличением разности скоростей между ограничением скорости и скоростью транспортного средства-носителя (блок 231c вычисления второго ограничителя ускорения) и выбирается более низкое из первого значения ограничения ускорения и второго значения ограничения ускорения (блок 231d согласования ограничителя ускорения; фиг. 2). Следовательно, в дополнение к эффектам, указанным выше в (1) - (3), возможно, в то время как скорость транспортного средства-носителя отлична от ограничения скорости, сделать ускорение плавным при приближении к ограничению скорости, при этом выдавая ускорение, которое соответствует ограничению скорости.
(5) Способ формирования целевой скорости транспортного средства для транспортного средства с помощью при вождении (транспортного средства с автономным управлением), причем способ включает в себя формирование целевой скорости транспортного средства для транспортного средства-носителя в соответствии с ограничением скорости на маршруте движения транспортного средства-носителя. Во время движения получают ограничение скорости на маршруте движения транспортного средства-носителя. Формируют целевое замедление вместе с формированием целевой скорости транспортного средства в соответствии с ограничением скорости. При формировании целевого замедления устанавливают значение ограничения замедления (ограничитель замедления) таким образом, чтобы оно увеличивалось в направлении ослабления ограничения замедления в соответствии с уменьшением ограничения скорости (блок 231 вычисления команды скорости; фиг. 11). Таким образом можно обеспечить способ формирования целевой скорости транспортного средства для транспортного средства с помощью при вождении (транспортного средства с автономным управлением), в котором удовлетворяется потребность в резком замедлении и предотвращается нарушение транспортных потоков в соответствии с различными дорогами, имеющими различные ограничения скорости, при движения с помощью при вождении (при автономном управлении). В частности, поскольку целевое замедление формируется в соответствии с ограничением скорости, можно установить характеристики замедления, которые соответствуют ограничению скорости на маршруте движения транспортного средства-носителя. Кроме того, транспортное средство-носитель может удовлетворить потребность в резком замедлении, в частности, в связи с внезапным появлением неожиданных препятствий при движении в городских районах, и активно обеспечивать безопасность. Кроме того, поскольку значение ограничения замедления (ограничитель замедления) устанавливается таким образом, чтобы оно увеличивалось в направлении ослабления ограничения замедления в соответствии с уменьшением ограничения скорости, может обеспечиваться различие в ощущении замедления и комфортность движения между моментами, когда ограничение скорости является высоким, и моментами, когда ограничение скорости является низким.
[0093] (6) При формировании целевого замедления формируется целевое замедление, имеющее резкий градиент снижения скорости транспортного средства, когда значение ограничения замедления (ограничитель замедления) является высоким, и формируется целевое замедление, имеющее плавный градиент снижения скорости транспортного средства, когда значение ограничения замедления (ограничитель замедления) является низким (блок 231 вычисления команды скорости); фиг. 15). Следовательно, в дополнение к эффектам, указанным выше в (5), можно добиться как плавного замедления, при котором не возникает неприятных ощущений при движении по высокоскоростным дорогам, так и резкого замедления для упрощения обеспечения активной безопасности при движении в городских районах.
[0094] (7) При формировании целевого замедления значение ограничения рывка замедления устанавливается таким образом, чтобы оно увеличивалось в направлении ослабления ограничения рывка замедления в соответствии с уменьшением ограничения скорости (блок 231g установки значения ограничения рывка замедления; фиг. 2). Следовательно, в дополнение к эффектам, указанным выше в (5) и (6), можно плавно изменять во времени замедление и достигать как ощущения замедления, так и комфортности движения путём ограничения рывка замедления.
[0095] (8) При получении информации об ограничении скорости в качестве ограничения скорости получается ограничение по умолчанию, полученное путем распознавания дорожного знака (блок 22 получения информации об ограничении скорости; фиг. 1). Следовательно, в дополнение к эффектам, указанным выше в (1) - (7), возможно изменить характеристики ускорения и замедления в соответствии с ограничением скорости по умолчанию, указанным на дорожном знаке.
[0096] (9) При получении информации об ограничении скорости в качестве ограничения скорости получается ограничение скорости по умолчанию, полученное с использованием предшествующей информации из картографических данных, (блок 22 получения информации об ограничении скорости; фиг. 1). Следовательно, в дополнение к эффектам, указанным выше в (1) - (8), возможно изменить характеристики ускорения и характеристики замедления в соответствии с ограничением скорости по умолчанию, выраженным в данных карты.
[0097] (10) При получении информации об ограничении скорости, когда невозможно получить ограничение скорости по дорожным знакам или из картографических данных, в качестве ограничения скорости получается скорость, определяемая как скорость, с которой можно двигаться без значительного отклонения от транспортного потока на основании информации о транспортном потоке, оцененной из множества элементов информации о положении периферийных транспортных средств, полученной от бортовых датчиков (блок 22 получения информации об ограничении скорости; фиг. 1). Следовательно, в дополнение к эффектам, указанным выше в (1) - (9), можно получить ограничение скорости на основании информации о транспортном потоке, когда невозможно получить ограничение скорости по дорожным знакам или по картографическим данным.
[0098] (11) При получении информации об ограничении скорости, когда получается множество ограничений скорости, в качестве ограничения скорости выбирается самое низкое значение из множества ограничений скорости (блок 22 получения информации об ограничении скорости: фиг. 1). Следовательно, в дополнение к эффектам, указанным выше в (1) - (9), можно выбрать из множества ограничений скорости то ограничение скорости, при котором обеспечивается более безопасное движение.
[0099] (12) Устройство для формирования целевой скорости транспортного средства для транспортного средства с помощью при вождении, оборудованного контроллером (блоком 2 управления автономным управлением) для формирования целевой скорости транспортного средства для транспортного средства-носителя в соответствии с ограничением скорости движения на маршруте транспортного средства-носителя, причем контроллер (блок 2 управления автономным движением) содержит блок 22 получения информации об ограничении скорости и блок 23 формирования целевой скорости транспортного средства. При движении блок 22 получения информации об ограничении скорости получает ограничение скорости на маршруте движения транспортного средства-носителя. Блок 23 формирования целевой скорости транспортного средства формирует целевое ускорение вместе с формированием целевой скорости транспортного средства в соответствии с ограничением скорости, и во время формирования целевого ускорения устанавливает значение ограничения ускорения таким образом, чтобы оно увеличивалось в направлении ослабления ограничения ускорения в соответствии с увеличением ограничения скорости (фиг. 1). Таким образом возможно создание устройства для формирования целевой скорости транспортного средства для транспортного средства с помощью при вождении (транспортного средства с автономным управлением), в котором во время движения с помощью при вождении (с автономным управлением) пассажир не испытывает неприятных ощущений, и предотвращается нарушение транспортных потоков, в соответствии с различными дорогами, имеющими различные ограничения скорости.
[0100] Выше способ и устройство для формирования целевой скорости транспортного средства для транспортного средства с помощью при вождении в соответствии с настоящим изобретением были описаны с обращением к первому варианту осуществления. Однако его конкретная конфигурация не ограничена конфигурацией по первому варианту осуществления; возможны изменения конструкции, дополнения и т.п. без отклонения от сущности изобретения, охарактеризованной в прилагаемой формуле изобретения.
[0101] В первом варианте осуществления блок 22 получения информации об ограничении скорости был описан как получающий информацию об ограничении скорости из дорожных знаков, картографических данных и транспортного потока в окружении транспортного средства-носителя. Однако другой пример блока получения информации об ограничении скорости получает информацию об ограничении скорости согласно информации инфраструктуры, связанной с транспортным потоком, , когда ограничение скорости временно изменяется из-за погоды и т.п.
[0102] В первом варианте осуществления был приведен пример, в котором характеристики предварительного ограничения целевого ускорения и целевые характеристики замедления подвергаются обработке по вычислению ограничителей в соответствии с ограничением скорости, посредством чего получается значение ограничения ускорения и/или значение ограничение замедления. Однако также может быть принята конфигурация, в которой, например, характеристики предварительного ограничения целевого ускорения и характеристики целевого замедления фильтруются с использованием фильтра, который соответствует ограничению скорости, чтобы тем самым получить значение ограничения ускорения и/или значение ограничения замедления.
[0103] В первом варианте осуществления способ и устройство формирования целевой скорости транспортного средства согласно настоящему изобретению применяются в транспортном средстве с автономным управлением, в котором осуществляется автономное управление рулевым управлением/движением/торможением посредством выбора режима автономного управления. Однако способ и устройство формирования целевой скорости транспортного средства согласно настоящему изобретению также могут применяться в транспортных средствах, в которых целевая скорость транспортного средства используется для помощи водителю при вождении, например в транспортном средстве с помощью при вождении, в котором оказывается помощь водителю в управлении транспортным средством путем отображения целевой скорости транспортного средства, или в транспортном средстве с помощью при вождении, оснащенном только ACC.
Изобретение относится к способу и устройству формирования целевой скорости транспортного средства для транспортного средства с помощью при вождении. Способ формирования целевой скорости транспортного средства для формирования целевой скорости транспортного средства для транспортного средства-носителя, которая формируется в соответствии с ограничением скорости на маршруте движения транспортного средства-носителя, содержит этапы, на которых получают ограничение скорости на маршруте движения транспортного средства-носителя во время движения, формируют целевое ускорение в соответствии с ограничением скорости и ослабляют ограничение ускорения при формировании целевого ускорения в большей степени, когда ограничение скорости на маршруте движения транспортного средства-носителя является высоким, по сравнению с тем, когда ограничение скорости на маршруте движения транспортного средства-носителя является низким. Устанавливают первое значение ограничения ускорения, которое увеличивается в соответствии с увеличением ограничения скорости, устанавливают второе значение ограничения ускорения, которое увеличивается в соответствии с увеличением разности скоростей между ограничением скорости и скоростью транспортного средства-носителя, и выбирают более низкое из первого значения ограничения ускорения и второго значения ограничения ускорения в качестве значения ограничения ускорения. Достигается повышение безопасности управления транспортным средством. 4 н. и 9 з.п. ф-лы, 15 ил.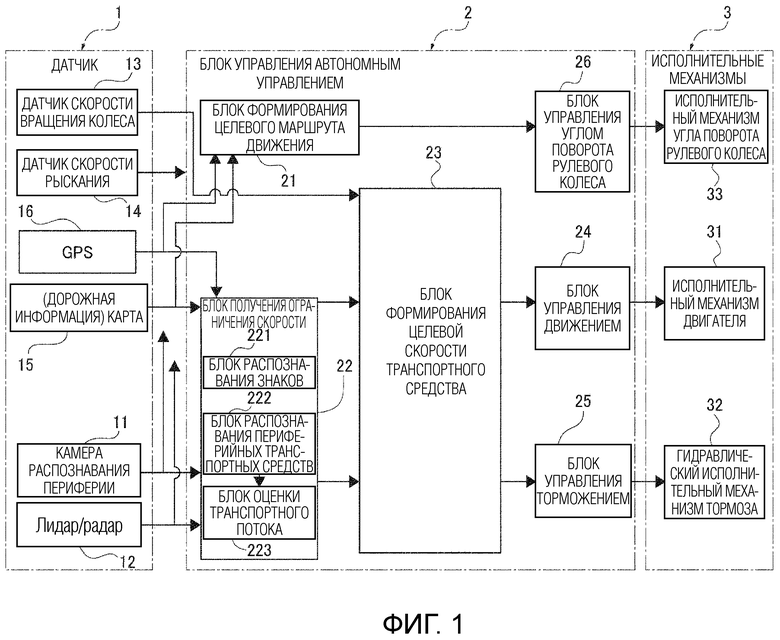
1. Способ формирования целевой скорости транспортного средства для формирования целевой скорости транспортного средства для транспортного средства-носителя, которая формируется в соответствии с ограничением скорости на маршруте движения транспортного средства-носителя, причём способ формирования целевой скорости транспортного средства содержит этапы, на которых:
получают ограничение скорости на маршруте движения транспортного средства-носителя во время движения;
формируют целевое ускорение в соответствии с ограничением скорости; и
ослабляют ограничение ускорения при формировании целевого ускорения в большей степени, когда ограничение скорости на маршруте движения транспортного средства-носителя является высоким, по сравнению с тем, когда ограничение скорости на маршруте движения транспортного средства-носителя является низким; и
устанавливают первое значение ограничения ускорения, которое увеличивается в соответствии с увеличением ограничения скорости, устанавливают второе значение ограничения ускорения, которое увеличивается в соответствии с увеличением разности скоростей между ограничением скорости и скоростью транспортного средства-носителя, и выбирают более низкое из первого значения ограничения ускорения и второго значения ограничения ускорения в качестве значения ограничения ускорения.
2. Способ формирования целевой скорости транспортного средства по п. 1, в котором
при формировании целевого ускорения ограничение ускорения ослабляют в соответствии с увеличением ограничения скорости на маршруте движения транспортного средства-носителя.
3. Способ формирования целевой скорости транспортного средства по п. 1 или 2, в котором
при формировании целевого ускорения формируют целевое ускорение, имеющее резкий градиент увеличения скорости транспортного средства, вследствие того, что значение ограничения ускорения устанавливается таким образом, чтобы оно увеличивалось, когда ограничение ускорения ослабляется, и формируют целевое ускорение, имеющее плавный градиент увеличения скорости транспортного средства, вследствие того, что значение ограничения ускорения устанавливается таким образом, чтобы оно уменьшалось, когда ограничение ускорения становится строже.
4. Способ формирования целевой скорости транспортного средства по любому из пп. 1-3, в котором
при формировании целевого ускорения значение ограничения рывка ускорения устанавливается таким образом, чтобы оно увеличивалось в направлении ослабления ограничения рывка ускорения в соответствии с увеличением ограничения скорости на маршруте движения транспортного средства-носителя.
5. Способ формирования целевой скорости транспортного средства по любому из пп. 1-4, дополнительно содержащий этапы, на которых:
формируют целевое замедление в соответствии с ограничением скорости; и
при формировании целевого замедления ослабляют ограничение замедления в большей степени, когда ограничение скорости на маршруте движения транспортного средства-носителя является низким, по сравнению с тем, когда ограничение скорости на маршруте движения транспортного средства-носителя является высоким.
6. Способ формирования целевой скорости транспортного средства по п. 5, в котором
при формировании целевого замедления ослабляют ограничение замедления в соответствии с уменьшением ограничения скорости на маршруте движения транспортного средства-носителя.
7. Способ формирования целевой скорости транспортного средства по п. 5 или 6, в котором
при формировании целевого замедления формируют целевое замедление, имеющее резкий градиент снижения скорости транспортного средства, вследствие того, что значение ограничения замедления устанавливается таким образом, чтобы оно увеличивалось, когда ограничение замедления ослабляется, и формируют целевое замедление, имеющее плавный градиент снижения скорости транспортного средства, вследствие того, что значение ограничения замедления устанавливается таким образом, чтобы оно уменьшалось, когда ограничение замедления становится строже.
8. Способ формирования целевой скорости транспортного средства по любому из пп. 5-7, в котором
при формировании целевого замедления значение ограничения рывка замедления устанавливают таким образом, чтобы оно увеличивалось в направлении ослабления ограничения рывка замедления в соответствии с уменьшением ограничения скорости на маршруте движения транспортного средства-носителя.
9. Способ формирования целевой скорости транспортного средства для формирования целевой скорости транспортного средства для транспортного средства-носителя, которая формируется в соответствии с ограничением скорости на маршруте движения транспортного средства-носителя, причём способ формирования целевой скорости транспортного средства содержит этапы, на которых
получают ограничение скорости на маршруте движения транспортного средства-носителя во время движения;
формируют целевое ускорение в соответствии с ограничением скорости; и
ослабляют ограничение ускорения при формировании целевого ускорения в большей степени, когда ограничение скорости на маршруте движения транспортного средства-носителя является высоким, по сравнению с тем, когда ограничение скорости на маршруте движения транспортного средства-носителя является низким;
при получении ограничения скорости на маршруте движения транспортного средства-носителя, когда невозможно получить ограничение скорости по дорожным знакам или из картографических данных при движении, в качестве ограничения скорости на маршруте движения транспортного средства-носителя получают скорость, определяемую как скорость, с которой возможно движение без существенного отклонения от транспортного потока, на основании информации о транспортном потоке, оцененной из множества элементов информации о положении периферийных транспортных средств, полученной от бортовых датчиков.
10. Способ формирования целевой скорости транспортного средства для формирования целевой скорости транспортного средства для транспортного средства-носителя, которая формируется в соответствии с ограничением скорости на маршруте движения транспортного средства-носителя, причём способ формирования целевой скорости транспортного средства содержит этапы, на которых:
получают ограничение скорости на маршруте движения транспортного средства-носителя во время движения;
формируют целевое ускорение в соответствии с ограничением скорости; и
ослабляют ограничение ускорения при формировании целевого ускорения в большей степени, когда ограничение скорости на маршруте движения транспортного средства-носителя является высоким, по сравнению с тем, когда ограничение скорости на маршруте движения транспортного средства-носителя является низким; и
при получении ограничения скорости на маршруте движения транспортного средства-носителя, когда при движении получено множество ограничений скорости, в качестве ограничения скорости на маршруте движения транспортного средства-носителя выбирается самое низкое значение из множества ограничений скорости.
11. Способ формирования целевой скорости транспортного средства по п. 9 или 10, в котором
при получении ограничения скорости на маршруте движения транспортного средства-носителя в качестве ограничения скорости на маршруте движения транспортного средства-носителя при движении получают ограничение скорости по умолчанию, полученное путем распознавания дорожного знака.
12. Способ формирования целевой скорости транспортного средства по любому из пп. 9-11, в котором
при получении ограничения скорости на маршруте движения транспортного средства-носителя в качестве ограничения скорости на маршруте движения транспортного средства-носителя при движении получают ограничение скорости по умолчанию, полученное с использованием предшествующей информации из картографических данных.
13. Устройство для формирования целевой скорости транспортного средства для транспортного средства с помощью при вождении, причём устройство содержит
контроллер, который формирует целевую скорость транспортного средства для транспортного средства-носителя в соответствии с ограничением скорости на маршруте движения транспортного средства-носителя,
контроллер содержит
блок получения информации об ограничении скорости, который получает ограничение скорости на маршруте движения транспортного средства-носителя во время движения, и
блок формирования целевой скорости транспортного средства, который формирует целевое ускорение в соответствии с ограничением скорости; и
при формировании целевого ускорения блок формирования целевой скорости транспортного средства ослабляет ограничение ускорения в большей степени, когда ограничение скорости на маршруте движения транспортного средства-носителя является высоким, по сравнению с тем, когда ограничение скорости на маршруте движения транспортного средства-носителя является низким, устанавливает первое значение ограничения ускорения, которое увеличивается в соответствии с увеличением ограничения скорости, устанавливают второе значение ограничения ускорения, которое увеличивается в соответствии с увеличением разности скоростей между ограничением скорости и скоростью транспортного средства-носителя, и выбирает более низкое из первого значения ограничения ускорения и второго значения ограничения ускорения в качестве значения ограничения ускорения.
| Токарный резец | 1924 |
|
SU2016A1 |
| US 6401024 B1, 04.06.2002 | |||
| RU 2013108455 A, 10.09.2014. | |||

