Изобретение относится к области вооружения, с использованием беспилотных летательных аппаратов (БПЛА) - «дронов», конкретно - к электрическим тяговым системам транспортных средств с питанием от собственных источников энергоснабжения, с использованием энергии от первичных или вторичных элементов.
Недостатком электрических БПЛА является относительно малая продолжительность их работы из-за ограничения емкости бортового электрического аккумулятора.
Первый способ продления полетного времени - подзарядка аккумуляторов посредством стационарной зарядной станции [1. RU 2593207 С1, МПК H02J 7/00, 10.08.2016].
Однако при этом требуется значительное время зарядки, что не всегда возможно в условиях военного использования и в других чрезвычайных ситуациях.
Второй способ продления полетного времени - оперативная замена бортового аккумулятора посредством станции замены аккумуляторов, как правило в полевых условиях и преимущественно в автоматическом режиме [2. RU 181757 U1, МПК H01M 10/46; B64C 31/00; B64C 99/00; B60K 1/04; B64C 39/02, 26/07/2018].
Это существенно сокращает время «энергоперевооружения» БПЛА, однако при этом усложняется устройство станции.
И в первом и во втором технологиях энергетической подпитки БПЛА естественно стремление к мобильности станции, организации «тылового» и даже «фронтового» сопровождения одиночных БПЛА и тем более мультиагентной группы БПЛА. В приложении к «рою» БПЛА, особенно актуален вопрос автоматизации зарядки или замены аккумуляторов.
Так, известно размещение стартового комплекса БПЛА на самоходной установке (шасси) [3. RU 2399860 С1, МПК F41H 13/00, 20.09.2010].
Однако наличие специализированного самоходного шасси, при всех преимуществах, увеличивает стоимость комплекса в целом, а сопровождение по суше столь мобильных объектов как БПЛА, определяет явное пространственно-временное несоответствие между тем и другим: БПЛА уже отработают энергоресурс аккумуляторов, а организованное на базе стартового комплекса зарядное устройство (устройство замены аккумуляторов) успеет «выдвинуться» незначительно.
Близким к заявляемому изобретению аналогом является «Системы и способы для замены аккумуляторов БПЛА», содержащая посадочную платформу для БПЛА и устройство временной его фиксации на ней, магазин заряженных электрических аккумуляторов и устройство замены ими отработанных аккумуляторов на БПЛА, при этом предусмотрена связь БПЛА со станцией [4. US 9139310 В1, МПК B60L 11/18, патентообладатель SZ DJI TECHNOLOGY Co., Ltd; 22.09.2015].
Однако в этом аналоге не предусмотрена возможность транспортировки станции посредством обслуживаемых станцией БПЛА.
Еще более близким к заявляемому изобретению аналогом является «Станция автоматической замены аккумуляторных батарей для беспилотных летательных аппаратов» и алгоритм ее работы, защищенные упомянутым выше патентом Российской Федерации [2. RU 181757 U1, МПК H01M 10/46; B64C 31/00; B64C 99/00; B60K 1/04; B64C 39/02, 26.07.2018].
Известное устройство-аналог (см. формулу аналога 2) содержит платформу для установки БПЛА, револьверную головку хранения и зарядки аккумуляторов, два линейных привода, фронтальный и тыловой толкатель и корпус для аккумулятора, установленный в револьверной головке.
Здесь ограничение возможных конструкций магазинов аккумуляторов только револьверным типом не оправдано и нуждается в расширении формулировок, а конструктивные особенности механизмов (приводов) замены аккумуляторов могут быть упущены как не существенные.
Главным же недостатком является обозначенная выше проблема стационарности или существенной ограниченности мобильности станции как средства технического обеспечения/сопровождения БПЛА или группы БПЛА. Как следствие - недостаточное «близкодействие», вытекающий из него неоправданно завышенный расход бортовой электроэнергии БПЛА, полетного времени и ресурса полезной работы, а также недостаточная низкая вероятность захвата станции противником.
Однако здесь имеет место проблема реализации принципа «близкодействия», оперативности и эффективности эвакуации станции при угрозе ее захвата.
Наиболее близким к заявляемому изобретению по назначению и совокупности существенных конструктивных признаков (прототипом) является станция автоматической замены аккумуляторов для БПЛА, содержащая посадочную платформу для БПЛА и устройство временной его фиксации на ней, магазин заряженных электрических аккумуляторов и устройство автоматической замены ими отработанных аккумуляторов на БПЛА, при полном весе станции, не превышающим грузоподъемности БПЛА с учетом динамики его перемещения, с возможностью транспортировки станции посредством БПЛА, при этом работа устройства характеризуется отдельной совокупностью признаков как способ использования устройства [5. RU 2696632 А1, МПК B64C 39/02; H01M 10/46; B64F 1/18, 05.08.2019].
Однако и такому устройству свойственны недостатки, обусловливающие еще недостаточно высокие его тактико-технические / технико-эксплуатационные характеристики (ТТХ / ТЭХ): отсутствует техническая возможность обмена информацией между станцией, БПЛА (включая мультиагентный рой БПЛА) и центральным оператором о своем местоположении, своих текущих энергетических возможностей и наличия / отсутствия БПЛА на платформе, и приема закодированных управляющих сигналов от центрального оператора и/или всех мультиагентов роя БПЛА.
Проблемой (задачей), на решение которой направлено заявляемое изобретение, является устранение отмеченных недостатков устройства-прототипа и, соответственно, повышения его тактико-технических / технико-эксплуатационных характеристик, за счет технической возможности обмена информацией между станцией, БПЛА (включая мультиагентный рой БПЛА) и центральным оператором о своем местоположении, своих текущих энергетических возможностей и наличия / отсутствия БПЛА на платформе, и приема закодированных управляющих сигналов от центрального оператора и/или всех мультиагентов роя БПЛА.
Решение этой проблемы (задачи) осуществляется за счет того, что в станции автоматической замены аккумуляторов для беспилотных летательных аппаратов (БПЛА), содержащей посадочную платформу для БПЛА и устройство временной его фиксации на ней, магазин заряженных электрических аккумуляторов и устройство автоматической замены ими отработанных аккумуляторов на БПЛА, при полном весе станции, не превышающим грузоподъемности БПЛА с учетом динамики его перемещения, с возможностью транспортировки станции посредством БПЛА, согласно заявляемому изобретению, она дополнительно содержит автономное радиопередающее устройство с источником питания, радиопередатчиком и радиоприемником, с возможностью излучения закодированного сигнала о своем местоположении, своих текущих энергетических возможностей и наличия / отсутствия БПЛА на платформе, и приема закодированных управляющих сигналов от центрального оператора и/или всех мультиагентов роя БПЛА.
Решение обозначенной проблемы (задачи) осуществляется также за счет дополнительных совокупностей конструктивных признаков (в дополнение к сформулированной выше основной совокупности):
- на посадочной платформе станции может быть предусмотрен встроенный датчик вертикальной нагрузки, с возможностью автоматического переключения, при посадке / взлете БПЛА, режима работы ее автономного радиопередающего устройства в части информации о наличии / отсутствии БПЛА на ее платформе (Это позволяет, как уже очевидно из формулировки признака, получить еще больший технический результат в рамках все той же поставленной задачи, а именно - весьма просто автоматизировать устройство, повысив его информативность);
- при предыдущей совокупности конструктивных признаков, датчик вертикальной нагрузки может быть выполнен в виде вертикально ориентированного концевого выключателя (Это является наиболее простым и дешевым способом реализации функционального назначения датчика вертикальной нагрузки на посадочную платформу, а также позволяет визуально контролировать состояние датчика);
- автономное радиопередающее устройство станции может быть выполнено с дополнительной функцией ретранслятора радиосвязи между всеми мультиагентами роя БПЛА (Это позволяет дополнительно рационализировать устройство, расширив его функциональные возможности, т.е. реализовать преимущества двух- и многофункциональных устройств, в приложении к безоператорным моно- или мультиагентным системам с БПЛА);
- автономное радиопередающее устройство станции может быть выполнено с дополнительной функцией ретранслятора радиосвязи между центральным оператором и всеми мультиагентами роя БПЛА, в частности - оператором и одиночным БПЛА (Это позволяет дополнительно рационализировать устройство, расширив его функциональные возможности, т.е. реализовать преимущества двух- и многофункциональных устройств, в приложении к операторным моно- или мультиагентным системам с БПЛА);
- источник питания радиопередающего устройства станции может быть выполнен взаимозаменяемым с источниками питания БПЛА (Это позволяет использовать его, в случае острой необходимости, в качестве резервного источника питания для замены отработанного источника питания последнего севшего БПЛА, разумеется в ущерб самой станции, которую в пассивном режиме предстоит доставить на базу этому последнему БПЛА, что дополнительно расширяет энергетические возможности при решении основной задачи).
Суть изобретения проиллюстрирована:
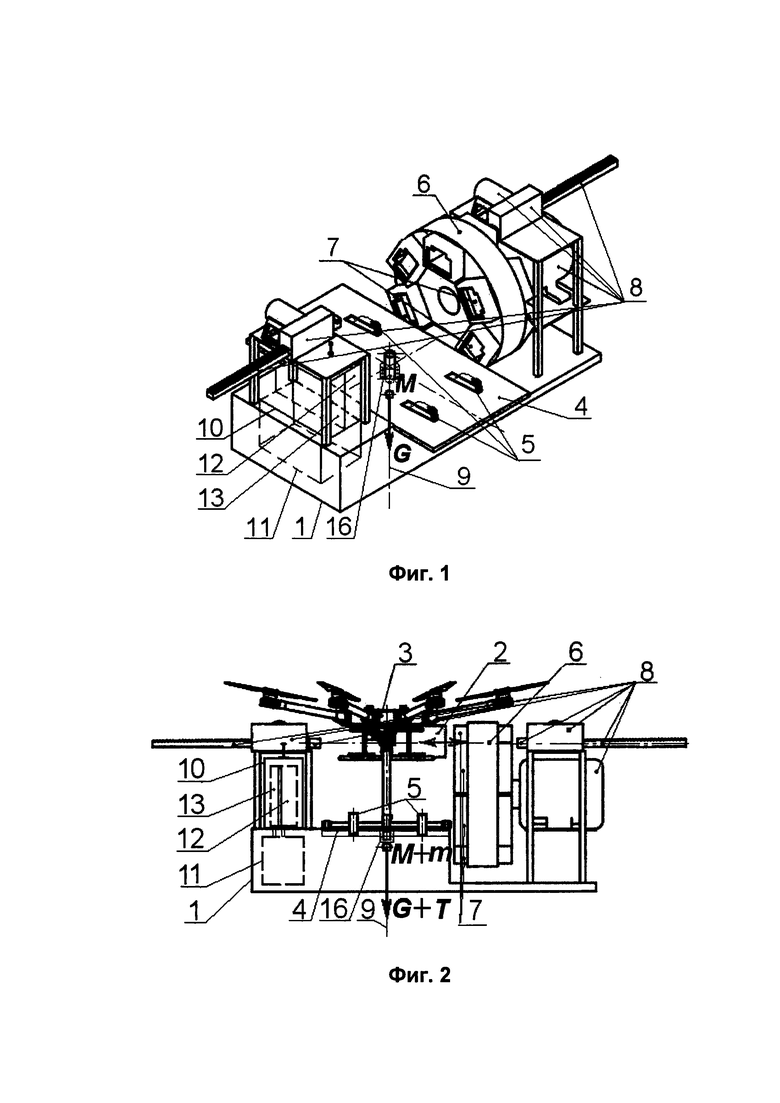
- на фиг. 1 показан общий вид заявляемой станции автоматической замены аккумуляторных батарей для БПЛА, с использованием частного примера револьверного устройства замены аккумуляторов (как в близком аналоге и прототипе), где точка М на вертикальной оси симметрии посадочной площадки - центр масс станции; G - вектор силы тяжести станции;
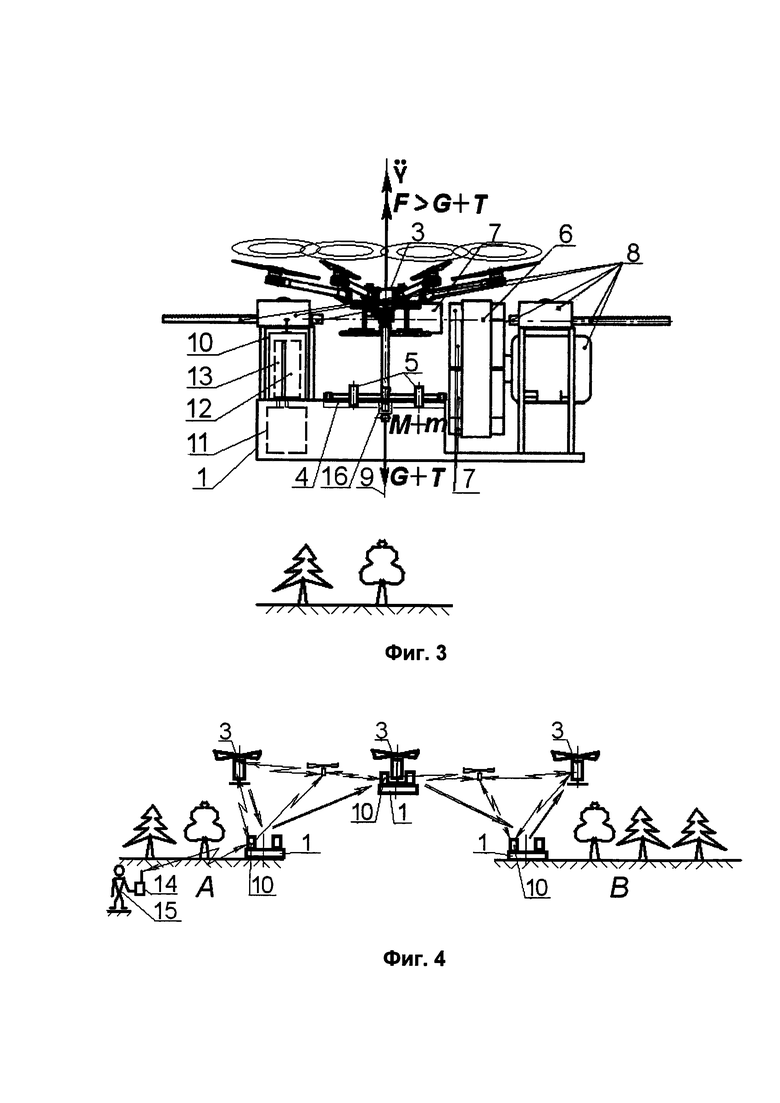
- на фиг. 2 - станция с посаженным на нее и временно зафиксированным (закрепленным) БПЛА, вид сбоку; где оппозитными стрелками условно показаны операции по замене отработанного бортового аккумулятора БПЛА на заряженный, где m - масса БПЛА; точка M+m на вертикальной оси симметрии посадочной площадки - центр суммарной массы станции и БПЛА на ней; G+T - вектор суммарной силы тяжести силы тяжести станции и БПЛА на ней;
- на фиг. 3 - процесс транспортировки станции по воздуху посредством БПЛА-«клиента», где F- вектор подъемной силы движителя (совокупности винтов в случае мультикоптера);  - вектор ускорения вертикального взлета БПЛА совместно со станцией;
- вектор ускорения вертикального взлета БПЛА совместно со станцией;
- на фиг. 4 - пример алгоритма действия БПЛА с перемещением станции из точки А в точку В пространства на местности с последующим выполнением основного полетного задания.
Заявляемая станция 1 автоматической замены отработанных аккумуляторов 2 для БПЛА 3 (с одной стороны - одиночного на задании «моноагента» или «агента» мультиагентного роя, а с другой стороны - «клиента» станции 1) включает в себя (см. фиг. 1, 2) посадочную платформу (платформу) 4 для установки БПЛА 3 и устройство 5 временной его трехстепенной фиксации на ней (например, встроенные в платформу 4 электромагнитные захваты 5 синхронного действия, захватывающие опорную раму БПЛА 3), магазин 6 заряженных электрических аккумуляторов 7 и устройство 8 автоматической замены ими отработанных аккумуляторов 2 на БПЛА 3.
Здесь использовано конкретное устройство 8 - с магазином 6 револьверного типа, но с обобщающим указанием позиций на фиг. 1 и 2, поскольку, по мнению автора, могут быть и другой конструкции. Поскольку в аналоге [2] конструкция и ее работа описаны, а в данной заявке это находится за рамками заявляемых признаков, таковые сознательно упущены, равно как и в прототипе.
Станция выполнена с весом G, не превышающим грузоподъемности БПЛА 3 с учетом динамики его перемещения, и с расположением центра масс (точка М) на вертикальной оси 9 симметрии платформы 4 (что достигается при конструировании, например с установкой противовеса в левой части станции, где свободного места достаточно), а устройство временной трехстепенной фиксации БПЛА 3 на платформе 2 выполнено с возможностью транспортировки станции 1 посредством этого БПЛА 3. Либо без предварительной замены аккумулятора 2 аккумулятором 7 (с последующей заменой, по выполнении транспортировки станции 1 из точки А в точку В, С или снова в исходную точку А, например, в порядке эвакуации при угрозе захвата станции 1 противником, и т.д., т.е. на новое место), либо с предварительной заменой, в зависимости от степени остаточной зарядки аккумулятора 2 и «энергетического баланса» всей операции и ее этапов.
Станция дополнительно содержит автономное радиопередающее устройство 10 с источником питания 11, радиопередатчиком 12 и радиоприемником 13. При этом предусмотрена возможность излучения закодированного сигнала о местоположении станции (координатах), ее текущих энергетических возможностях (количестве заряженных аккумуляторов 7 в магазине 6, запаса электроэнергии в ампер-часах в источнике питания 11) и наличии / отсутствии БПЛА 3 на платформе 4, и приема закодированных управляющих сигналов от пульта 14 центрального оператора 15 и/или всех мультиагентов роя БПЛА 3 или одиночного БПЛА 3.
Дальнейшее описание устройства заявляемой станции включает в себя дополнительные (не обязательные, но рекомендуемые как рациональные) конструктивные признаки и совокупности конструктивных признаков.
На посадочной платформе 4 может быть предусмотрен встроенный датчик вертикальной нагрузки на нее с возможностью фиксации фактов посадки/взлета БПЛА 3. Это может быть, в частности, подпружиненный концевой выключатель 16 с вертикальным перемещением, с возможностью автоматического переключения, при посадке / взлете БПЛА 3, режима работы ее автономного радиопередающего устройства 10 в части информации о наличии / отсутствии БПЛА 3 на платформе 4.
В принципе, выключатель 16 может быть конструктивно совмещен с подвижной частью фиксатора 5.
Автономное радиопередающее устройство 10 станции может быть выполнено с дополнительной функцией ретранслятора радиосвязи между всеми мультиагентами роя БПЛА 3.
В альтернативном частном примере автономное радиопередающее устройство 10 станции может быть выполнено с дополнительной функцией ретранслятора радиосвязи между центральным оператором и всеми мультиагентами роя БПЛА 3, в частности - оператором и одиночным БПЛА 3.
Источник питания 11 радиопередающего устройства 10 станции может быть выполнен взаимозаменяемым с источниками питания БПЛА 3, с возможностью использования его, в случае острой необходимости (перерасход электроэнергии при работе всех или «последнего» БПЛА 3 роя), в качестве резервного источника питания (7) для замены отработанного источника питания последнего севшего БПЛА 3. Разумеется, в ущерб самой станции, которую в пассивном режиме (с обесточенным радиопередающим устройством 10) предстоит этому последнему БПЛА 3 доставить на базу. Речь идет не только об электрической адаптации при смене «донора» у источника 11, но и, предпочтительно, геометрической идентичности корпусов источников 7 и 11. При этом не обязательно предусматривать на станции дополнительно устройство перемещения источника 11 на освободившееся место в магазине 6, но возможен и такой вариант: такое устройство может быть выполнено аналогичным описанному устройству 8.
Заявляемое устройство работает следующим образом (способ функционирования).
Способ функционирования, как «алгоритм работы станции» (по выражению в описании аналога [2]), включает предварительное закрепление БПЛА 3 с последующим функционированием устройства замены отработанного аккумулятора 2 заряженным (новым) аккумулятором 7 (толкатель, приводимый в движение линейным приводом, из корпуса закрепленного на БПЛА, демонтируется разряженный (отработанный) аккумулятор 2; тыловой толкатель продолжает перемещать аккумулятор 7 до установки его в корпус револьверной головки; установив аккумулятор 7 в корпус револьверной головки, толкатель возвращается на исходную позицию; револьверная головка поворачивается на позицию с заряженным аккумулятором 7, и фронтальным толкателем аккумулятор 7 перемещается из револьверной головки в корпус аккумулятора, закрепленного в БПЛА 3; после установки аккумулятора 7 в БПЛА 3, фронтальный толкатель перемещается в исходное положение; закрепление и базирование БПЛА 3 при установке в станцию 1 не рассматривается) [2. абз. 9, фиг. 1-4].
В приложении к способу функционирования, согласно заявляемому изобретению, после установки и фиксации БПЛА 3 на платформе 4 станции 1 в точке пространства А, осуществляют транспортировку станции 1 по воздуху посредством этого БПЛА 3 (см. фиг. 3), с последующими совместной посадкой в точке пространства В (см. фиг. 4, стрелки из двух линий), первичной или очередной заменой аккумулятора 2, отключением устройства 5 фиксации и отделения от станции 1 (см. фиг. 4, заключительный этап справа).
На всех этапах выполнения задания приемо-передающее устройство 10 используют по его прямому традиционному для таких устройств назначению, осуществляя информационно-командную кодированную радиосвязь между всеми участниками операции, включая, в общем случае, все БПЛА 3 мультиагентного роя и центрального оператора 15 с пультом (терминалом) 14 (см. фиг. 4, молниеобразные стрелки взаимосвязи).
При установке БПЛА 3 на платформе 4, концевой выключатель 16 автоматически утапливается в посадочной платформе 4 корпусом БПЛА 3 (см. фиг 2, 3), коммутируя соответствующие электрические цепи радиопередатчика 12 и радиоприемника 13, сигнализирующие при этом о текущей занятости станции (наличии на ней БПЛА 3) и выдающие информацию о текущем состоянии энергетических возможностей обслуживаемого БПЛА 3 и его перезарядки.
При наличии дополнительной функции «ретрансляция», устройство 10 станции 1 осуществляет и ее.
Возможен режим временного прекращения радиосвязи всей или локально (режимы «молчания») по соображениям экономии электроэнергии и/или радиомаскировки (известными или перспективными средствами).
При взлете БПЛА 3 с платформы 4 подпружиненный концевой выключатель 16 автоматически выдвигается из платформы 4 в исходное состояние (см. фиг. 1), вновь коммутируя электрические цепи устройства 10.
В частных случаях предусмотрены два альтернативных алгоритма работы устройства, а именно:
- указанные выше операции выполняют посредством одного и того же БПЛА 3, неоднократно, транспортируя станцию 1 на выбор в точки пространства С, D, и т.д., обратно в точку пространства А, временно оставляя ее для замены аккумуляторов 2 в этих точках пространства, причем как данного БПЛА 3, так и других БПЛА (3а, 3б, 3в, … - не показаны), например в составе мультиагентной группы («роя») из n БПЛА (Это позволяет достичь отмеченного технического результата уже при минимуме компонентов комплекса - одной станции 1 и одного БПЛА 3, а также в случае использования группы БПЛА 3 с конкретным «закрепленным» БПЛА-мультиагентом 3 с частной функцией типа «защитника» в футбольной команде);
- указанные выше операции выполняют посредством разных БПЛА 3, например в составе мультиагентной группы (3а, 3б, 3в,… - не показаны), неоднократно, транспортируя станцию 1 на выбор в точки пространства С, D, и т.д., обратно в точку пространства А, временно оставляя ее для замены аккумуляторов 2 в этих точках пространства (Это значительно расширяет возможности выбора «воздушного буксировщика» из группы БПЛА 3 в каждой конкретной обстановке).
То есть, обобщая названные два частных случая, предполагается многократность таких операций: из точки В тот же или другой БПЛА 3 (ближе расположенный, менее занятый в решении основных задач, более энергетически подпитанный, на замену сбитого и т.д.) доставляет в точку С и т.д., включая возврат/эвакуацию в исходную точку А.
Если произошел общий перерасход электроэнергии (при потреблении БПЛА 3), то используют источник питания 11 в качестве резервного, запитав им последний БПЛА 3 (или последнюю перезарядку единственного БПЛА 3), в частном случае наличия дополнительного устройства «пересадки» источника 11 в освободившееся гнездо магазина 6 устройства 8, и далее в освободившееся гнездо БПЛА 3.
В «сцепке» буксирующего станцию 1 БПЛА 3 с платформой 4 подъемная сила F, создаваемая совокупностью винтов БПЛА 3, превышая совокупный вес самого БПЛА 3 и станции 1, создает ускорение (в общем случае - вертикальную его составляющую) , за счет чего и происходит вертикальный совместный старт и последующая транспортировка по воздуху.
Технический и специальный (военный) результаты от использования заявляемой группы изобретений заключаются в создании устройства станции замены электрических аккумуляторов для БПЛА с более высокими ТТХ / ТЭХ за счет технической возможности не только оперативной транспортировки станции в ту или иную точку пространства («поближе» к зоне действия БПЛА или, наоборот, экстренной эвакуации станции при угрозе ее захвата противником) не специализированным транспортным средством, причем наземным, а по воздуху, самими БПЛА-«клиентами обслуживания» этой станции, но и за счет (и в этом суть технического результата) технической возможности обмена информацией между станцией, БПЛА (включая мультиагентный рой БПЛА) и центральным оператором о своем местоположении, своих текущих энергетических возможностей и наличия / отсутствия БПЛА на платформе, и приема закодированных управляющих сигналов от центрального оператора и/или всех мультиагентов роя БПЛА.
| название | год | авторы | номер документа |
|---|---|---|---|
| Станция автоматической замены аккумуляторов для беспилотных летательных аппаратов (БПЛА) и способ ее использования | 2018 |
|
RU2696632C1 |
| Система автоматической дозаправки беспилотного летательного аппарата | 2020 |
|
RU2757400C1 |
| Мультиагентная робототехническая система | 2017 |
|
RU2658684C1 |
| Гибридная аэромобильная система воздушного наблюдения | 2023 |
|
RU2827131C1 |
| Техническое средство для дистанционных лечебно-профилактических и усыпляющих инъекций биологическим объектам | 2021 |
|
RU2779778C1 |
| Трёхсредный мобильный аппарат "Этажерка" | 2019 |
|
RU2706748C1 |
| Противотанковая мина "Стрекоза-М" с возможностью пространственного перемещения с зависанием и переворачиванием в воздухе, разведки, нейтрализации и поражения мобильных бронированных целей | 2016 |
|
RU2628351C1 |
| Музыкальный инструмент "Пирогармония" | 2019 |
|
RU2717918C1 |
| СПОСОБ ТОЧНОЙ ПОСАДКИ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2016 |
|
RU2615587C9 |
| Способ замены внутришахтной базовой станции | 2018 |
|
RU2681787C1 |
Станция автоматической замены аккумуляторов для беспилотных летательных аппаратов (БПЛА) содержит посадочную платформу для БПЛА и устройство временной его фиксации на ней, магазин заряженных электрических аккумуляторов и устройство автоматической замены ими отработанных аккумуляторов на БПЛА, при полном весе станции, не превышающем грузоподъемности БПЛА с учетом динамики его перемещения, а также содержит автономное радиопередающее устройство с источником питания, радиопередатчиком и радиоприемником. Обеспечивается увеличение времени и дальности полетов БПЛА за счет обеспечения мобильности станции. 5 з.п. ф-лы, 4 ил.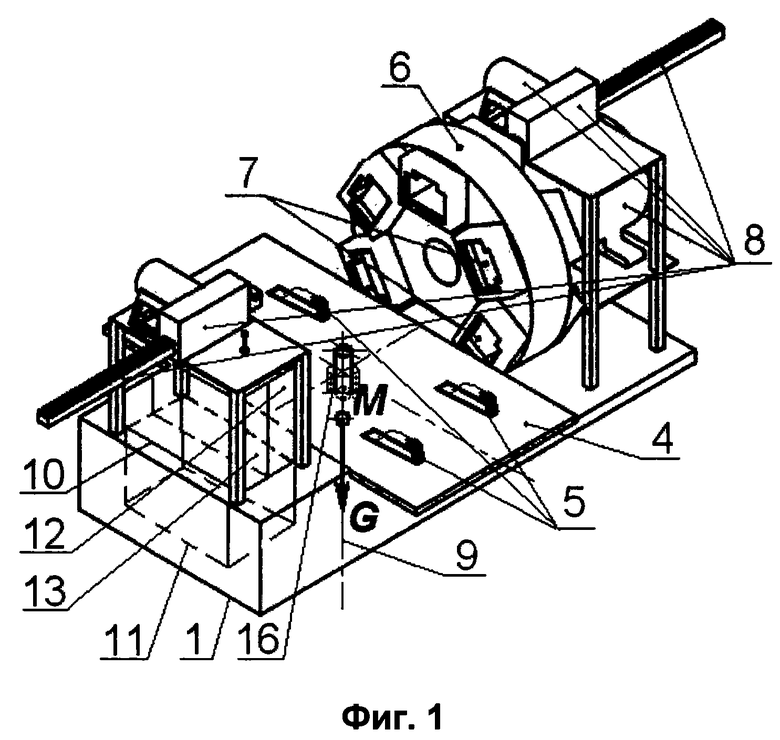
1. Станция автоматической замены аккумуляторов для беспилотных летательных аппаратов (БПЛА), содержащая посадочную платформу для БПЛА и устройство временной его фиксации на ней, магазин заряженных электрических аккумуляторов и устройство автоматической замены ими отработанных аккумуляторов на БПЛА, при полном весе станции, не превышающем грузоподъемности БПЛА с учетом динамики его перемещения, с возможностью транспортировки станции посредством БПЛА, отличающаяся тем, что она дополнительно содержит автономное радиопередающее устройство с источником питания, радиопередатчиком и радиоприемником, с возможностью излучения закодированного сигнала о своем местоположении, своих текущих энергетических возможностей и наличия/отсутствия БПЛА на платформе, и приема закодированных управляющих сигналов от центрального оператора и/или всех мультиагентов роя БПЛА.
2. Станция по п. 1, отличающаяся тем, что на ее посадочной платформе предусмотрен встроенный датчик вертикальной нагрузки, с возможностью автоматического переключения, при посадке/взлете БПЛА, режима работы ее автономного радиопередающего устройства в части информации о наличии/отсутствии БПЛА на ее платформе.
3. Станция по п. 2, отличающаяся тем, что датчик вертикальной нагрузки выполнен в виде вертикально ориентированного концевого выключателя.
4. Станция по п. 1, отличающаяся тем, что ее автономное радиопередающее устройство выполнено с дополнительной функцией ретранслятора радиосвязи между всеми мультиагентами роя БПЛА.
5. Станция по п. 1, отличающаяся тем, что ее автономное радиопередающее устройство выполнено с дополнительной функцией ретранслятора радиосвязи между центральным оператором и всеми мультиагентами роя БПЛА, в частности оператором и одиночным БПЛА.
6. Станция по п. 1, отличающаяся тем, что источник питания ее радиопередающего устройства выполнен взаимозаменяемым с источниками питания БПЛА.
| 0 |
|
SU181757A1 | |
| WO 2016019567 A1, 11.02.2016 | |||
| CN 0207033003 U, 23.02.2018 | |||
| WO 2018039784 A1, 08.03.2018 | |||
| US 20180354649 A1, 13.12.2018. | |||

