Группа изобретений относится к области вооружения, с использованием беспилотных летательных аппаратов (БПЛА) - «дронов», конкретно - к электрическим тяговым системам транспортных средств с питанием от собственных источников энергоснабжения, с использованием энергии от первичных или вторичных элементов.
Недостатком электрических БПЛА является относительно малая продолжительность их работы из-за ограничения емкости бортового электрического аккумулятора.
Первый способ продления полетного времени - подзарядка аккумуляторов посредством стационарной зарядной станции [1. RU 2593207 С1, МПК H02J 7/00, 10.08.2016].
Однако при этом требуется значительное время зарядки, что не всегда возможно в условиях военного использования и в др. чрезвычайных ситуациях.
Второй способ продления полетного времени - оперативная замена бортового аккумулятора посредством станции замены аккумуляторов, как правило в полевых условиях и преимущественно в автоматическом режиме [2. RU 181757 U1, МПК H01M 10/46; В64С 31/00; В64С 99/00; В60K 1/04; В64С 39/02, 26/07/2018].
Это существенно сокращает время «энергоперевооружения» БПЛА, однако при этом усложняется устройство станции.
И в первом и во втором технологиях энергетической подпитки БПЛА естественно стремление к мобильности станции, организации «тылового» и даже «фронтового» сопровождения одиночных БПЛА и тем более мультиагентной группы БПЛА. В приложении к «рою» БПЛА, особенно актуален вопрос автоматизации зарядки или замены аккумуляторов.
Так, известно размещение стартового комплекса БПЛА на самоходной установке (шасси) [3. RU 2399860 С1, МПК F41H 13/00, 20.09.2010].
Однако наличие специализированного самоходного шасси, при всех преимуществах, увеличивает стоимость комплекса в целом, а сопровождение по суше столь мобильных объектов как БПЛА, определяет явное пространственно-временное несоответствие между тем и другим: БПЛА уже отработают энергоресурс аккумуляторов, а организованная на базе стартового комплекса зарядное устройство (устройство замены аккумуляторов) успеет «выдвинуться» незначительно.
Наиболее близким к заявляемой группе изобретений по назначению и совокупности существенных признаков аналогом (прототипом) является «Станция автоматической замены аккумуляторных батарей для беспилотных летательных аппаратов» и алгоритм ее работы, защищенные патентом Российской Федерации [2. RU 181757 U1, МПК Н01М 10/46; В64С 31/00; В64С 99/00; В60K 1/04; В64С 39/02, 26/07/2018].
Известное устройство-прототип (см. формулу прототипа 2) содержит платформу для установки БПЛА, револьверную головку хранения и зарядки аккумуляторов, два линейных привода, фронтальный и тыловой толкатель и корпус для аккумулятора, установленный в револьверной головке.
Здесь ограничение возможных конструкций магазинов аккумуляторов только револьверным типом под углом зрения заявляемого изобретения (см. далее) уже не оправдано и нуждается в расширении формулировок, а конструктивные особенности механизмов (приводов) замены аккумуляторов могут быть упущены как не существенные.
Главным же недостатком, с позиций заявляемого изобретения, является обозначенная выше проблема стационарности или существенной ограниченности мобильности станции как средства технического обеспечения/сопровождения БПЛА или группы БПЛА. Как следствие - недостаточное «близкодействие», вытекающий из него неоправданно завышенный расход бортовой электроэнергии БПЛА, полетного времени и ресурса полезной работы, а также недостаточная низкая вероятность захвата станции противником.
Проблемой (и, соответственно, задачей) первого изобретения из заявляемой группы является создание такого устройства (совокупности существенных конструктивных признаков) станции автоматической замены аккумуляторов для БПЛА, которое позволило бы более эффективно сопровождать БПЛА (группу БПЛА), оперативно перемещаясь в зону действия БПЛА - реализации принципа «близко-действия», оперативно и эффективно эвакуировать станцию при угрозе ее захвата.
Обозначенная проблема снимается (задача решается) тем, что станция автоматической замены аккумуляторов для БПЛА, содержащая платформу для установки БПЛА и устройство временной его фиксации на ней, магазин заряженных электрических аккумуляторов и устройство автоматической замены ими отработанных аккумуляторов на БПЛА, согласно заявляемому изобретению-устройству, выполнена с весом, не превышающим грузоподъемности БПЛА с учетом динамики его перемещения, и с расположением центра масс на вертикальной оси симметрии платформы, а устройство временной фиксации БПЛА на платформе выполнено с возможностью транспортировки станции посредством этого БПЛА.
Суть изобретения проиллюстрирована:
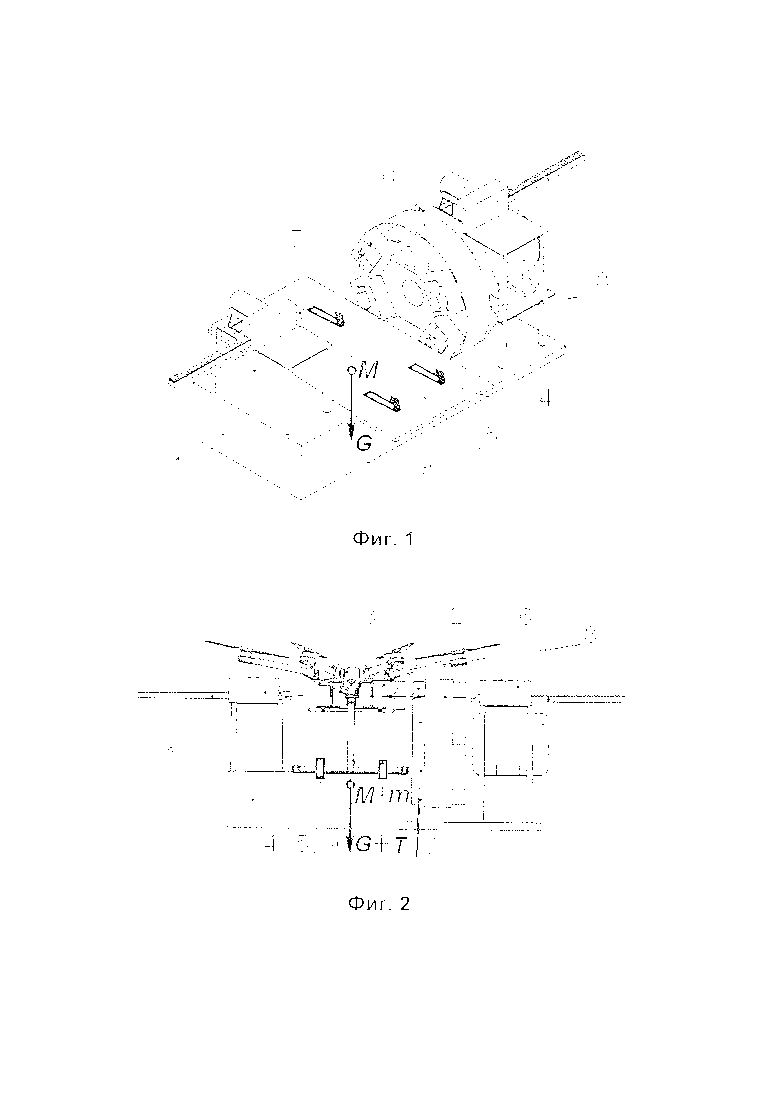
- на фиг. 1 показан общий вид заявляемой станции автоматической замены аккумуляторных батарей для БПЛА, с использованием частного примера револьверного устройства замены аккумуляторов (как в прототипе), где точка М на вертикальной оси симметрии посадочной площадки - центр масс станции; G - вектор силы тяжести станции;
- на фиг. 2 - станция с посаженным на нее и временно зафиксированным (закрепленным) БПЛА, вид сбоку; где оппозитными стрелками условно показаны операции по замене отработанного бортового аккумулятора БПЛА на заряженный, где m - масса БПЛА; точка M+m на вертикальной оси симметрии посадочной площадки - центр суммарной массы станции и БПЛА на ней; G+T - вектор суммарной силы тяжести силы тяжести станции и БПЛА на ней;
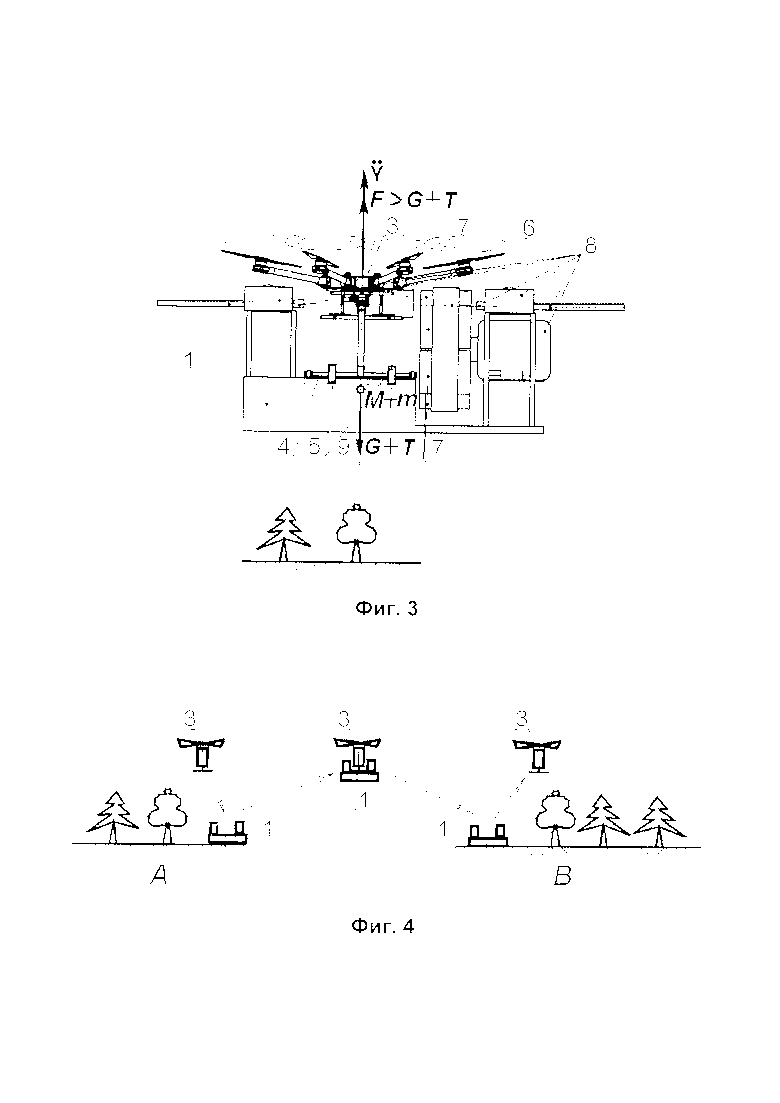
- на фиг. 3 - процесс транспортировки станции по воздуху посредством БПЛА-«клиента», где F - вектор подъемной силы движителя (совокупности винтов в случае мультикоптера); - вектор ускорения вертикального взлета БПЛА совместно со станцией;
- вектор ускорения вертикального взлета БПЛА совместно со станцией;
- на фиг. 4 - пример алгоритма действия БПЛА с перемещением станции из точки А в точку В пространства на местности с последующим выполнением основного полетного задания.
Заявляемая станция 1 автоматической замены отработанных аккумуляторов 2 для БПЛА («клиента» станции 1) 3 включает в себя (см. фиг. 1, 2) платформу (посадочную платформу) 4 для установки БПЛА 3 и устройство 5 временной его трехстепенной фиксации на ней (например, встроенные в платформу 4 электромагнитные захваты 5 синхронного действия, захватывающие опорную раму БПЛА 3), магазин 6 заряженных электрических аккумуляторов 7 и устройство 8 автоматической замены ими отработанных аккумуляторов 2 на БПЛА 3.
Здесь использовано конкретное устройство 8 - с магазином 6 револьверного типа, но с обобщающим указанием позиций на фиг. 1 и 2, поскольку, по мнению автора, могут быть и другой конструкции. Поскольку в прототипе конструкция и ее работа описаны, а в данной заявке это находится за рамками заявляемых признаков, таковые сознательно упущены.
Станция выполнена с весом G, не превышающим грузоподъемности БПЛА 3 с учетом динамики его перемещения, и с расположением центра масс (точка М) на вертикальной оси 9 симметрии платформы 4 (что достигается при конструировании, например с установкой противовеса в левой части станции, где свободного места достаточно), а устройство временной трехстепенной фиксации БПЛА 3 на платформе 2 выполнено с возможностью транспортировки станции 1 посредством этого БПЛА 3. Либо без предварительной замены аккумулятора 2 аккумулятором 7 (с последующей заменой, по выполнении транспортировки станции 1 из точки А в точку В, С или снова в исходную точку А, например, в порядке эвакуации при угрозе захвата станции 1 противником, и т.д., т.е. на новое место), либо с предварительной заменой, в зависимости от степени остаточной зарядки аккумулятора 2 и «энергетического баланса» всей операции и ее этапов.
Известный способ-прототип, представленный как «алгоритм работы станции», включает предварительное закрепление БПЛА с последующим функционированием устройства замены аккумулятора (толкатель, приводимый в движение линейным приводом, из корпуса закрепленного на БПЛА, демонтируется разряженный (отработанный) аккумулятор; тыловой толкатель продолжает перемещать аккумулятор до установки его в корпус револьверной головки; установив аккумулятор в корпус револьверной головки, толкатель возвращается на исходную позицию; револьверная головка поворачивается на позицию с заряженным аккумулятором, и фронтальным толкателем аккумулятор перемещается из револьверной головки в корпус аккумулятора, закрепленного в БПЛА; после установки аккумулятора в БПЛА, фронтальный толкатель перемещается в исходное положение; закрепление и базирование БПЛА при установке в станцию не рассматривается) [2. RU 181757 U1, МПК Н01М 10/46; В64С 31/00; В64С 99/00; В60K 1/04; В64С 39/02, 26/07/2018, абз. 9, фиг. 1-4].
Поскольку способ-прототип тесным образом привязан к описанному выше устройству-прототипу, то и его недостатки и нюансы соответствуют перечисленным в характеристике устройства-прототипа. Способу-прототипу также свойственны недостаточно высокие ТТХ и возможности, несмотря на все его положительные качества.
Соответственно, аналогичны и проблема с задачей.
В приложении к способу, обозначенная проблема снимается (задача решается) тем, что в способе использования станции 1 автоматической замены аккумуляторов 2 аккумуляторами 7 для БПЛА 3, содержащей платформу 4 для установки БПЛА 3 и устройство 5 временной его (3) фиксации на ней (4), магазин 6 заряженных электрических аккумуляторов 7 и устройство 8 автоматической замены ими отработанных аккумуляторов 2 на БПЛА 3, согласно заявляемому изобретению-способу, после установки и фиксации БПЛА 3 на платформе 4 станции 1 в точке пространства А, осуществляют транспортировку станции 1 по воздуху посредством этого БПЛА 3 (см. фиг. 3), с последующими совместной посадкой в точке пространства В (см. фиг. 4), первичной или очередной заменой аккумулятора 2, отключением устройства 5 фиксации и отделения от станции 1 (см. фиг. 4, заключительный этап справа).
Задача решается также за счет двух альтернативных совокупностей дополнительных признаков способа, а именно:
- указанные в основной совокупности признаков способа операции выполняют посредством одного и того же БПЛА 3, неоднократно, транспортируя станцию 1 на выбор в точки пространства С, D, и т.д., обратно в точку пространства А, временно оставляя ее для замены аккумуляторов 2 в этих точках пространства, причем как данного БПЛА 3, так и других БПЛА (3а, 3б, 3в, … - не показаны), например в составе мультиагентной группы из n БПЛА (Это позволяет достичь отмеченного технического результата уже при минимуме компонентов комплекса - одной станции и одного БПЛА, а также в случае использования группы БПЛА с конкретным «закрепленным» БПЛА-мультиагентом с частной функцией типа «защитника» в футбольной команде);
- указанные в основной совокупности признаков способа операции выполняют посредством разных БПЛА, например в составе мультиагентной группы (3а, 3б, 3в, … - не показаны), неоднократно, транспортируя станцию 1 на выбор в точки пространства С, D, и т.д., обратно в точку пространства А, временно оставляя ее для замены аккумуляторов 2 в этих точках пространства (Это значительно расширяет возможности выбора «воздушного буксировщика» из группы БПЛА в каждой конкретной обстановке).
То есть, обобщая названные два частных случая, предполагается, в общем случае, многократность таких операций: из точки В тот же или другой БПЛА 3 (ближе расположенный, менее занятый в решении основных задач, более энергетически подпитанный, на замену сбитого и т.д.) доставляет в точку С и т.д., включая возврат/эвакуацию в исходную точку А.
В «сцепке» буксирующего станцию 1 БПЛА 3 с платформой 4 подъемная сила F, создаваемая совокупностью винтов БПЛА 3, превышая совокупный вес самого БПЛА 3 и станции 1, создает ускорение (в общем случае - вертикальную его составляющую)  за счет чего и происходит вертикальный совместный старт и последующая транспортировка по воздуху.
за счет чего и происходит вертикальный совместный старт и последующая транспортировка по воздуху.
Технический и специальный (военный) результаты от использования заявляемой группы изобретений заключаются в создании устройства станции замены электрических аккумуляторов для БПЛА, а также способа его использования (с частными случаями) с более высокими ТТХ за счет технической возможности оперативной транспортировки станции в ту или иную точку пространства («поближе» к зоне действия БПЛА или, наоборот, экстренной эвакуации станции при угрозе ее захвата противником) не специализированным транспортным средством, причем наземным, а по воздуху, самими БПЛА-«клиентами обслуживания» этой станции (главная инновационная идея заявляемой группы изобретений).
| название | год | авторы | номер документа |
|---|---|---|---|
| Станция автоматической замены аккумуляторов для беспилотных летательных аппаратов (БПЛА) | 2019 |
|
RU2723267C1 |
| Способ управления положением свободного конца закрепленной на летательном аппарате гибкой связи с внешним объектом в окружающем пространстве и комплекс для его осуществления | 2020 |
|
RU2751212C1 |
| Мультиагентная робототехническая система | 2017 |
|
RU2658684C1 |
| Трёхсредный мобильный аппарат "Этажерка" | 2019 |
|
RU2706748C1 |
| Система автоматической дозаправки беспилотного летательного аппарата | 2020 |
|
RU2757400C1 |
| Способ использования транспортного комплекса из наземной бронированной машины и вертолета | 2018 |
|
RU2703322C1 |
| АНТИДРОНОВЫЙ БОЕПРИПАС ДЛЯ ГРАНАТОМЁТА | 2024 |
|
RU2841512C1 |
| АНТИДРОНОВЫЙ БОЕПРИПАС ДЛЯ ГРАНАТОМЁТА | 2024 |
|
RU2841428C1 |
| БОЕПРИПАС ДЛЯ ГРАНАТОМЕТА ПРОТИВ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2023 |
|
RU2823620C1 |
| БОЕПРИПАС ДЛЯ ГРАНАТОМЕТА ПРОТИВ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2024 |
|
RU2830216C1 |
Группа изобретений относится к области вооружения с использованием БПЛА, к электрическим тяговым системам транспортных средств с питанием от собственных источников энергоснабжения, с использованием энергии от первичных или вторичных элементов. Станция содержит платформу для установки БПЛА и устройство временной фиксации, магазин заряженных электрических аккумуляторов и устройство автоматической замены аккумуляторов на БПЛА. Станция выполнена с весом (G), не превышающим грузоподъемности БПЛА с учетом динамики его перемещения, и с расположением центра масс (М) на вертикальной оси симметрии платформы. Устройство временной фиксации БПЛА на платформе выполнено с возможностью транспортировки станции посредством БПЛА. В способе использования станции после установки и фиксации БПЛА на платформе в точке пространства А осуществляют транспортировку станции по воздуху БПЛА с последующими совместной посадкой в точке В, заменой аккумулятора, отключением устройства фиксации и отделением от станции. Повышается оперативность и эффективность транспортировки станции автоматической замены аккумуляторов БПЛА. 2 н. и 2 з.п. ф-лы, 4 ил.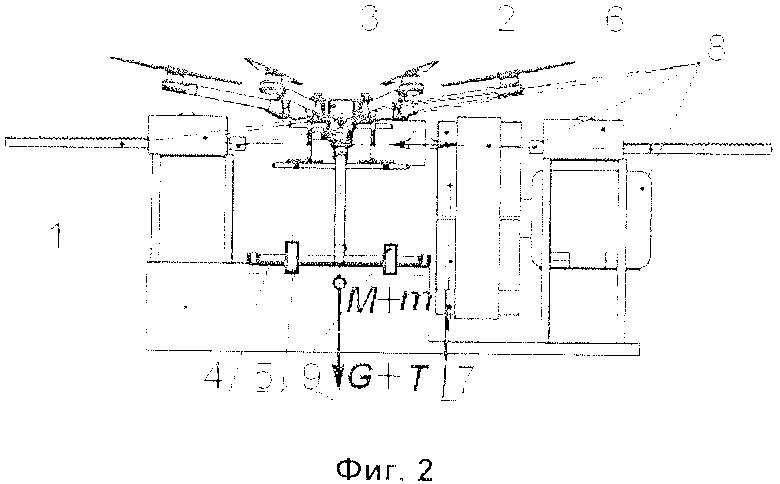
1. Станция автоматической замены аккумуляторов для беспилотных летательных аппаратов (БПЛА), содержащая платформу для установки БПЛА и устройство временной его фиксации на ней, магазин заряженных электрических аккумуляторов и устройство автоматической замены ими отработанных аккумуляторов на БПЛА, отличающаяся тем, что она выполнена с весом, не превышающим грузоподъемности БПЛА с учетом динамики его перемещения, и с расположением центра масс на вертикальной оси симметрии платформы, а устройство временной фиксации БПЛА на платформе выполнено с возможностью транспортировки станции посредством этого БПЛА.
2. Способ использования станции по п. 1, отличающийся тем, что после установки и фиксации БПЛА на платформе станции в точке пространства А осуществляют транспортировку станции по воздуху посредством этого БПЛА с последующими совместной посадкой в точке пространства В, первичной или очередной заменой аккумулятора, отключением устройства фиксации и отделением от станции.
3. Способ использования станции по п. 2, отличающийся тем, что указанные операции выполняют посредством одного и того же БПЛА неоднократно, транспортируя станцию на выбор в точки пространства С, D и т.д., обратно в точку пространства А, временно оставляя ее для замены аккумуляторов в этих точках пространства, причем как данного БПЛА, так и других БПЛА, например, в составе мультиагентной группы.
4. Способ использования станции по п. 2, отличающийся тем, что указанные операции выполняют посредством разных БПЛА, например, в составе мультиагентной группы неоднократно, транспортируя станцию на выбор в точки пространства С, D и т.д., обратно в точку пространства А, временно оставляя ее для замены аккумуляторов в этих точках пространства.
| US 9139310 В1, 22.09.2015 | |||
| US 20180155032 А1, 07.06.2018 | |||
| US 9764836 B1, 19.09.2017 | |||
| 0 |
|
SU181757A1 | |
| US 20170081043 А1, 23.03.2017. | |||

