ОБЛАСТЬ ТЕХНИКИ
Техническое решение относится к способам посадки летательных аппаратов, применимых, в частности, в системах точной посадки беспилотных летательных аппаратов (БПЛА) мини класса вертолетного типа, оснащенных бортовыми электронными устройствами наблюдения, навигации и автоматического управления полетом.
ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
Полет любого БПЛА разделяется на этапы:
- взлет;
- полет по маршруту;
- посадка.
Управление полетом БПЛА при выполнении любого из этих этапов - это процесс, в ходе которого решается широкий круг задач, связанных с определением навигационных параметров полета, а также выдерживания необходимого пространственного положения. Эффективность действий при решении перечисленных задач определяется большим количеством условий, основными из которых есть своевременность, точность и связанные с ними вопросы построения траекторий движения, которые обеспечивают наиболее эффективное и безопасное достижение цели текущего этапа полета.
Этап посадки является наиболее ответственным и напряженным участком полета. Известны системы управления, реализующие полет БПЛА по заданной траектории посадки. Так, в известном способе посадки БПЛА путем улавливания его в вертикальную сеть, описанном в обзоре "Дистанционно пилотируемые летательные аппараты капиталистических стран" /Под редакцией Федосова Е.А., Москва, Научно-информационный центр, 1989, с. 51-61, в носовой части БПЛА устанавливают импульсный источник излучения, работающий в ближней инфракрасной области спектра. На посадочной площадке устанавливают платформу с направляющими, которая в процессе посадки БПЛА остается неподвижной. На платформу устанавливают вертикальную раму, выполненную с возможностью вращения вокруг вертикальной оси, и привод для этого вращения. На раму устанавливают два ИК-приемника, вертикальную посадочную сеть, выполненную с возможностью ее горизонтального перемещения по направляющим, закрепленным на платформе, вычислитель и тормозное устройство, которое тросами соединяют с сетью. На конечном участке захода БПЛА на посадку путем дистанционного управления с земли выводят его в зону действия ИК-приемников, измеряют с их помощью угол возвышения и боковое смещение БПЛА относительно центра сети, вычисляют значения отклонений БПЛА от запрограммированной траектории захода на посадку и передают эти данные на борт БПЛА для обеспечения его попадания в сеть. При входе БПЛА в сеть перемещают последнюю вдоль направляющих рамы, гасят кинетическую энергию движения БПЛА за счет вытягивания тросов тормозного устройства и высвобождают из сети попавшийся в нее БПЛА.
Как видно из вышеприведенного описания, требуется довольно сложное и громоздкое наземное оборудование для реализации способа посадки БПЛА в сеть. Это ограничивает сферу возможного применения указанных способов, особенно в тех случаях, когда БПЛА должен иметь небольшую стоимость, малые массу и габариты. Для таких БПЛА ни по тактическим, ни по экономическим соображениям не оправдано применение сложных посадочных устройств. Что касается обычного самолетного способа горизонтальной посадки, то для сверхлегких БПЛА он неприемлем, поскольку требует наличия взлетно-посадочной полосы. Более интересен для БПЛА способ вертикальной посадки, используемый вертолетами и специальными самолетами с вертикальным взлетом и посадкой. Однако эти летательные аппараты сложны в эксплуатации и управлении, дороги и обычно используются лишь в пилотируемой авиации.
Известен способ посадки Tethered aerial system for data gathering [US 0130233964 Al, Woodworth, Peverill, September 12, 2013, МПК B64D 7/80, H02G 1/00, B64D 5/00, G05D /00, В64С 7/02] [1]. Данный способ был реализован израильской фирмой Sky Sapience в проекте HoverMast. БПЛА мультироторного типа, компактно укладывающийся внутри специального бокса, который может размещаться на крыше здания, автомобиле (в том числе беспилотном), корабле. Для выполнения задания бокс автоматически раскрывается, аппарат разворачивает боковые пропеллеры и поднимается на определенную высоту, для питания используется медный кабель. Высота подъема ограничивается длиной кабеля - 50 м. Управление аппаратом сводится к поддержанию вертикального положения кабеля, при этом возможно следование за передвигающимся базовым мобильным средством. На аппарате располагаются гиростабилизированные камеры и различные датчики. По кабелю передаются питающее напряжение и команды управления, а также информация с датчиков и камер. Точная посадка обеспечивается тем, что БПЛА затягивается в бокс кабелем питания [2].
Ограничения в высоте подъема в заявленном способе определяются массой кабеля - медный кабель не может быть слишком тонким в расчете на довольно большие потребляемые токи. К тому же двигатели БПЛА с кабелем должны обеспечивать большую подъемную силу по сравнению с БПЛА с аналогичной полезной нагрузкой без кабеля, что увеличивает стоимость и габариты всей системы в целом.
Наиболее близкими к заявленному техническому по своей сущности и достигаемому техническому результату являются полетные контроллеры - основная плата управления, обеспечивающая функционирование мультикоптера. В качестве «мозга» платы управления используется микроконтроллер, зачастую это либо маломощные Atmega328, либо более современные, Atmega2560 или STM-процессоры [3].
Количество функций зависит от наличия на борту БПЛА соответствующей периферии и дополнительных устройств. К функциям полетного контроллера относятся:
- стабилизация БПЛА в воздухе;
- удержание высоты (при помощи барометра) и позиции (при помощи GPS);
- автоматический полет по заданным заранее точкам (опционально);
- передача на землю текущих параметров полета с помощью модема или Bluetooth (опционально);
- обеспечение безопасности полета (возврат в точку взлета при потере сигнала, автопосадка);
- подключение дополнительной периферии: OSD, светодиодной индикации и пр.
Так, известны патенты компании DJI Vertical takeoff and landing (vtol) small unmanned aerial system for monitoring oil and gas pipelines [US 20140236390 Al, Mohamadi, August 21, 2014, МПК B64C 9/00, B64D 7/08, B64C 9/00] [4] и компании SKYCATCH Positioning mechanism and UAV (Unmanned Aerial Vehicle) base station using positioning mechanism [CN 204250382 U, April 8, 2015, МПК B64F1/02] [5], в которых используется система глобального позиционирования для обеспечения автоматической посадки БПЛА в заданную область.
Автопосадка позволяет приземлиться БПЛА в установленную точку, но точность обеспечивается системой навигации GPS и зависит от числа спутников, видимых над горизонтом в идеальных условиях (чистое поле). Типичная точность современных GPS-приемников в горизонтальной плоскости при хорошей видимости спутников и использовании алгоритмов коррекции составляет примерно 6-8 метров, чего недостаточно для обеспечения безопасности и надежности эксплуатации БПЛА при посадке в автоматическом режиме.
СУЩНОСТЬ ТЕХНИЧЕСКОГО РЕШЕНИЯ
Задача, на решение которой направлено заявляемое техническое решение, заключается в создании способа посадки БПЛА вертолетного типа, способного обеспечить достаточный уровень точности перемещения БПЛА в точку посадки.
Заявляемое техническое решение обеспечивает получение технического результата, заключающегося в увеличении точности автоматической посадки БПЛА за счет использования полетного контроллера, спутниковой системы навигации, гироскопа, акселерометра, магнитометра, барометра, сонара, бортового компьютера, оптической камеры и, по меньшей мере, одной оптической метки, а также в повышении автономности, надежности и безопасности эксплуатации БПЛА.
Предметом заявленного технического решения является способ точной посадки БПЛА, в котором бортовой компьютер БПЛА при помощи алгоритмов компьютерного зрения обрабатывает временную последовательность кадров, закодированную в битовый поток, получаемую с оптической камеры, установленной на БПЛА, и содержащую данные, по меньшей мере, об одной оптической метке, расположенной в точке посадки БПЛА, для определения, по меньшей мере, двух углов смещения. Бортовой компьютер БПЛА получает от полетного контроллера обработанные при помощи рекурсивных фильтров данные, по меньшей мере, о двух углах наклона (крен и тангаж) и высоте БПЛА. Бортовой компьютер БПЛА обрабатывает полученные данные о высоте БПЛА, углах смещения и наклона, и направляет сигналы управления при помощи пропорционально-интегрально-дифференцирующего (ПИД) регулятора на полетный контроллер БПЛА в автоматическом режиме с частотой не менее пороговой для корректировки траектории и обеспечения заданной точности посадки БПЛА.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
На Фиг. 1 приведен частный случай, при котором углы наклона БПЛА равны нулю, а БПЛА не движется и завис над оптической меткой на высоте h.
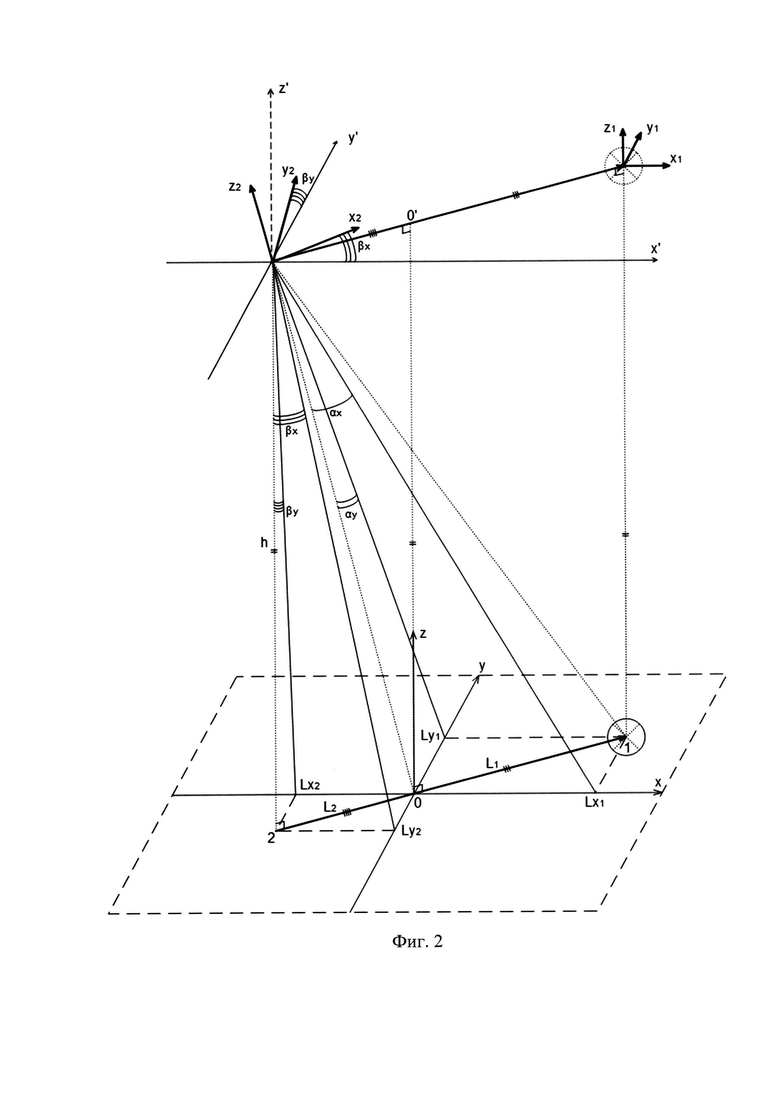
На Фиг. 2 приведен общий случай, при котором углы наклона БПЛА βx и βy не равны нулю, а БПЛА движется путем изменения углов наклона над оптической меткой на высоте h.
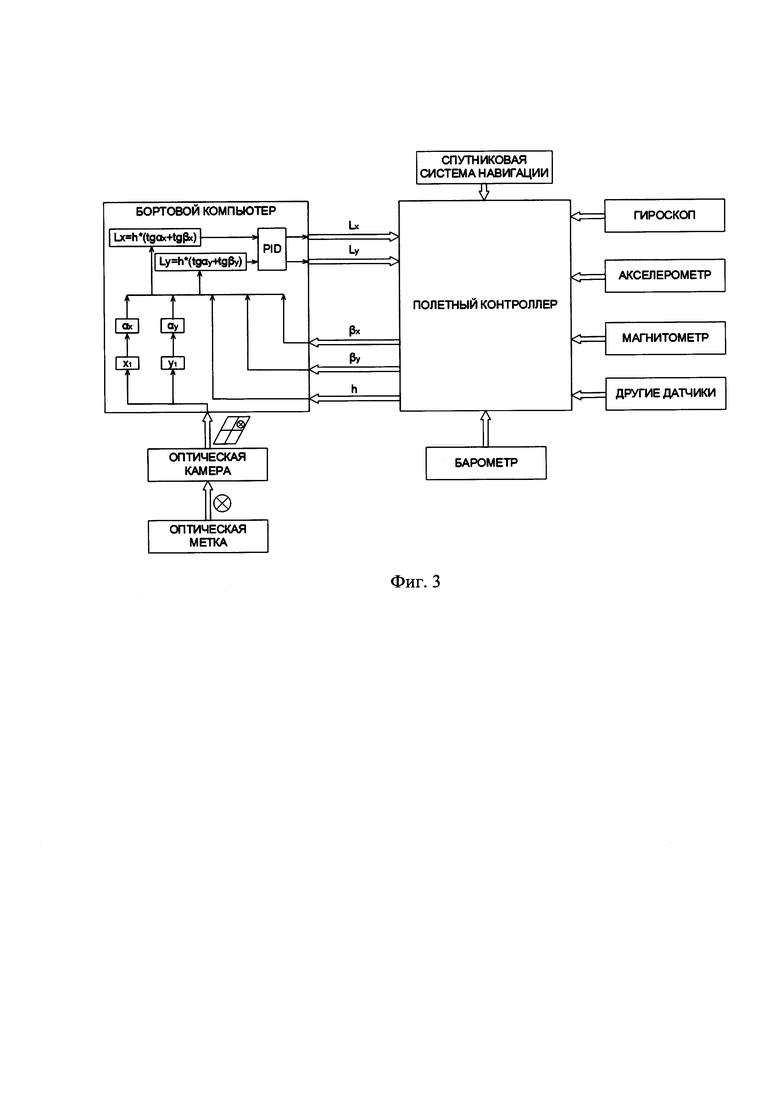
На Фиг. 3 приведена общая структурная схема взаимодействия отдельных элементов.
ПОДРОБНОЕ ОПИСАНИЕ ТЕХНИЧЕСКОГО РЕШЕНИЯ
Здесь и далее будут описаны термины, используемые в заявке. БПЛА (беспилотный летательный аппарат) - летательный аппарат без экипажа на борту.
GPS (англ. Global Positioning System - система глобального позиционирования, читается Джи Пи Эс) - спутниковая система навигации, обеспечивающая измерение расстояния, времени и определяющая местоположение во всемирной системе координат WGS 84.
ГЛОНАСС (Глобальная навигационная спутниковая система) - советская/российская спутниковая система навигации.
USB (ю-эс-би, сокр. от англ. Universal Serial Bus - «универсальная последовательная шина») - последовательный интерфейс передачи данных для среднескоростных и низкоскоростных периферийных устройств в вычислительной технике.
Фильтр Калмана - эффективный рекурсивный фильтр, оценивающий вектор состояния динамической системы, используя ряд неполных и зашумленных измерений.
OpenCV (англ. Open Source Computer Vision Library, библиотека компьютерного зрения с открытым исходным кодом) - библиотека алгоритмов компьютерного зрения, обработки изображений и численных алгоритмов общего назначения с открытым кодом.
Математическая морфология - теория и техника анализа и обработки геометрических структур, основанная на теории множеств, топологии и случайных функциях, которая применяется в обработке цифровых изображений.
Фотограмметрия - научно-техническая дисциплина, занимающаяся определением формы, размеров, положения и иных характеристик объектов по фотоизображениям.
Пропорционально-интегрально-дифференцирующий (ПИД) регулятор - устройство в управляющем контуре с обратной связью.
Метод Зиглера-Никольса - эвристический метод подбора коэффициентов ПИД-регулятора.
Метод CHR (Chien-Hrones-Reswick) - метод подбора коэффициентов ПИД-регулятора, в котором используют критерий максимальной скорости нарастания при отсутствии перерегулирования или при наличии не более чем 20%-ного перерегулирования.
Предметом заявленного технического решения является способ точной посадки БПЛА, в котором бортовой компьютер БПЛА при помощи алгоритмов компьютерного зрения обрабатывает временную последовательность кадров, закодированную в битовый поток, получаемую с оптической камеры, установленной на БПЛА, и содержащую данные, по меньшей мере, об одной оптической метке, расположенной в точке посадки БПЛА, для определения, по меньшей мере, двух углов смещения. Бортовой компьютер БПЛА получает от полетного контроллера обработанные при помощи рекурсивных фильтров данные, по меньшей мере, о двух углах наклона (крен и тангаж) и высоте БПЛА. Бортовой компьютер БПЛА обрабатывает полученные данные о высоте БПЛА, углах смещения и наклона, и направляет сигналы управления при помощи пропорционально-интегрально-дифференцирующего (ПИД) регулятора на полетный контроллер БПЛА в автоматическом режиме с частотой не менее пороговой для корректировки траектории и обеспечения заданной точности посадки БПЛА.
Основные признаки и преимущества изобретения следуют из приведенного ниже описания варианта исполнения, основанного на прилагаемых фигурах.
На фиг. 1 представлен частный случай, при котором углы наклона БПЛА равны нулю. БПЛА (xu, yu, zu) не движется и завис над оптической меткой на высоте h. Оптическая камера регистрирует изображение с разрешением не менее 640×480 пикселей по осям x и у соответственно. Сигналы управления Lx и Ly, направляемые от бортового компьютера БПЛА на полетный контроллер БПЛА, зависят только от углов смещения αх и αу и высоты h. Вектор смещения L задает направление движения в плоскости х'0'у'.
На фиг. 2 представлен общий случай, при котором углы наклона БПЛА βx и βy не равны нулю. БПЛА (xu, yu, zu) движется путем изменения углов наклона над оптической меткой на высоте h. Оптическая камера регистрирует изображение с разрешением не менее 640×480 пикселей по осям x и у соответственно. Сигналы управления, направляемые от бортового компьютера БПЛА на полетный контроллер БПЛА, зависят не только от углов смещения αх и αу и высоты h, но и от углов наклона БПЛА βx и βy. Вектор смещения L задает направление движения в плоскости x'2'y'.
На фиг. 3 схематично изображена схема взаимодействия отдельных элементов. Данные углов наклона БПЛА βx и βy полетный контроллер БПЛА получает с гироскопа, акселерометра или магнитометра. Данные о высоте БПЛА h, полученные со спутниковой системы навигации, барометра или сонара, и данные об углах наклона БПЛА βx и βy с целью увеличения достоверности последних обрабатывает полетный контроллер БПЛА при помощи встроенного в него, по меньшей мере, одного рекурсивного фильтра, например, при помощи одной из разновидностей фильтра Калмана. Данные об углах смещения αх и αy получают в результате обработки фильтрами библиотек компьютерного зрения OpenCV, операциями математической морфологии или алгоритмами фотограмметрии временной последовательности кадров, закодированной в битовый поток и получаемой с оптической камеры, установленной на БПЛА и содержащей данные об оптической метке, расположенной в точке посадки БПЛА. Бортовой компьютер БПЛА обрабатывает полученные данные о высоте БПЛА, углах смещения и наклона, и направляет сигналы управления при помощи пропорционально-интегрально-дифференцирующего (ПИД) регулятора на полетный контроллер БПЛА в автоматическом режиме с частотой не менее пороговой, в частности не менее 10 Гц. Бортовой компьютер БПЛА формирует сигналы управления, на основании данных о векторе смещения БПЛА, определенного бортовым компьютером БПЛА в соответствии со следующими формулами:
Lx=h×tg(αx+βx),
Ly=h×tg(αy+βy),
где L - вектор смещения БПЛА, Lx - смещение БПЛА по оси х, Ly - смещение БПЛА по оси у, h - высота, αх - угол смещения по оси х, αу - угол смещения по оси у, βx - угол наклона по оси x (крен), βу - угол наклона по оси у (тангаж).
Для быстродействия корректировки и достаточной точности посадки подбираются коэффициенты ПИД регулятора ручной настройкой, методом Зиглера-Никольса или методом CHR, а высота линейно убывает.
Бортовой компьютер БПЛА при помощи ПИД регулятора передает сформированные сигналы управления на полетный контроллер БПЛА, который осуществляет корректировку курса БПЛА для его посадки в области не более 15 см от центра оптической метки.
Заявленное техническое решение обеспечивает точность посадки с погрешностью не более 15 см. Автономность БПЛА повышается за счет реализации точной посадки без участия человека. Также при точной посадке исключается возможность приземления БПЛА на неподготовленные поверхности и другие препятствия в районе посадки, что повышает уровень надежности и безопасности при эксплуатации БПЛА оператором или автоматической системой полета.
Заявляемый способ точной посадки БПЛА является промышленно применимым, так как при его реализации используют известные и апробированные компоненты. БПЛА вертолетного типа хорошо известны и в последние годы получают большое распространение. Полетный контроллер БПЛА с приемником сигналов радионавигационных систем может представлять собой контроллер с системой глобального позиционирования на базе GPS, ГЛОНАСС и других спутниковых или наземных навигационных систем. Бортовой компьютер БПЛА может быть одноплатным компьютером с микропроцессором, оперативной памятью, системами ввода-вывода и параллельными или USB-портами для подключения периферийных устройств. Оптическая камера может быть оснащена инфракрасными фильтрами и подключена к бортовому компьютеру БПЛА напрямую USB-кабелем или через буфер для хранения данных. В качестве оптической метки может использоваться, по меньшей мере, один активный опознавательный знак, например источник излучения заданной длинны волны, в частности инфракрасные светодиоды.
Хотя данное техническое решение описано конкретным примером его реализации, это описание не является ограничивающим, но приведено лишь для иллюстрации и лучшего понимания существа технического решения, объем которого определяется прилагаемой формулой.
ЛИТЕРАТУРА
1. Tethered aerial system for data gathering
[https://www. google. ru/patents/US20130233964]
2. Проект HoverMast
[http://www. skysapience. com]
3. Полетные контроллеры
AxdwpWot [http://ardupilot-mega.ru]
Naza [http://www.dji.com/product/naza-m-lite]
Pixhawk [https://store. 3drobotics.соm/products/3dr-pixhawk]
4. Vertical takeoff and landing (vtol) small unmanned aerial system for monitoring oil and gas pipelines
[http://www.google.com/patents/US20140236390]
5. Positioning mechanism and UAV (Unmanned Aerial Vehicle) base station using positioning mechanism
[https://www.google. ru/patents/CN204250382U?cl=en&hl=ru&dq=SKYCA TCH]
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ точной посадки беспилотного летательного аппарата и устройство для реализации способа | 2021 |
|
RU2773978C1 |
| СПОСОБ БЕЗАВАРИЙНОЙ ПОСАДКИ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2019 |
|
RU2727044C1 |
| СПОСОБ И СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДРОНОМ | 2018 |
|
RU2714977C1 |
| Способ автономного приземления беспилотного летательного аппарата на мобильную платформу | 2023 |
|
RU2821253C1 |
| Система автоматической дозаправки беспилотного летательного аппарата | 2020 |
|
RU2757400C1 |
| Малогабаритное бортовое радиоэлектронное устройство для управления пилотажно-навигационным комплексом беспилотного летательного аппарата | 2021 |
|
RU2799748C2 |
| Беспилотный аппарат и комплекс наблюдения для него | 2016 |
|
RU2642202C1 |
| Беспилотный летательный аппарат самолетного типа для обнаружения пропавшего человека | 2019 |
|
RU2723201C1 |
| КОМПЛЕКС ИЗМЕРЕНИЯ МОЩНОСТИ ИЗЛУЧЕНИЯ БАЗОВЫХ СТАНЦИЙ СОТОВОЙ СВЯЗИ В ВЕРТИКАЛЬНОЙ ПЛОСКОСТИ | 2015 |
|
RU2606344C1 |
| БПЛА вертикального взлета и посадки | 2020 |
|
RU2747006C1 |

Изобретение относится к способу точной посадки беспилотного летательного аппарата (БПЛА). Для точной посадки БПЛА получают временную последовательность кадров с оптической камеры на БПЛА, закодированную в битовый поток и содержащую данные об не менее одной оптической метке, расположенной в точке посадки, определяют не менее двух углов смещения при помощи алгоритмов компьютерного зрения, получают и обрабатывают с помощью рекурсивного фильтра данные о не менее двух углов наклона и высоте БПЛА, определяют вектор смещения БПЛА, формируют и направляют сигналы управления при помощи пропорционально-интегрально-дифференцирующего регулятора на полетный контроллер БПЛА, корректируют траекторию посадки БПЛА. Обеспечивается точность посадки с погрешностью не менее 15 см. 6 з.п. ф-лы, 3 ил.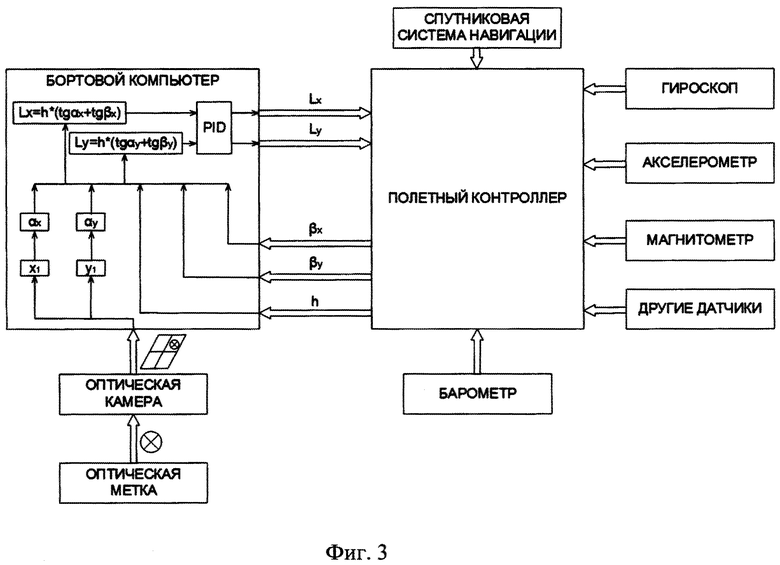
1. Способ точной посадки беспилотного летательного аппарата (БПЛА), включающий в себя этапы, на которых:
- получают временную последовательность кадров, закодированную в битовый поток, получаемую с оптической камеры, установленной на БПЛА, и содержащую данные, по меньшей мере, об одной оптической метке, расположенной в точке посадки БПЛА;
- определяют, по меньшей мере, два угла смещения при помощи алгоритмов компьютерного зрения;
- получают данные, по меньшей мере, о двух углах наклона БПЛА и высоте БПЛА;
- обрабатывают полученные данные, по меньшей мере, о двух углах наклона БПЛА и высоте БПЛА при помощи, по меньшей мере, одного рекурсивного фильтра;
- определяют вектор смещения БПЛА;
- формируют и направляют сигналы управления при помощи пропорционально-интегрально-дифференцирующего (ПИД) регулятора на полетный контроллер БПЛА;
- корректируют траекторию посадки БПЛА.
2. Способ точной посадки БПЛА по п. 1, отличающийся тем, что в качестве алгоритмов компьютерного зрения используют фильтры библиотек компьютерного зрения OpenCV и/или операции математической морфологии и/или алгоритмы фотограмметрии.
3. Способ точной посадки БПЛА по п. 1, отличающийся тем, что данные о высоте БПЛА получают с использованием спутниковой системы навигации и/или барометра и/или сонара.
4. Способ точной посадки БПЛА по п. 1, отличающийся тем, что данные об углах наклона БПЛА получают с использованием гироскопа и/или акселерометра и/или магнитометра.
5. Способ точной посадки БПЛА по п. 1, отличающийся тем, что в качестве рекурсивного фильтра используют, по меньшей мере, одну разновидность фильтра Калмана.
6. Способ точной посадки БПЛА по п. 1, отличающийся тем, что определяют вектор смещения БПЛА следующим образом:
Lx=h×tg(αx+βx),
Ly=h×tg(αy+βy),
где L - вектор смещения БПЛА, Lx - смещение БПЛА по оси х, Ly - смещение БПЛА по оси y, h - высота БПЛА, αх - угол смещения БПЛА по оси х, αy - угол смещения БПЛА по оси y, βх - угол наклона БПЛА по оси х (крен), βy - угол наклона БПЛА по оси y (тангаж).
7. Способ точной посадки БПЛА по п. 1, отличающийся тем, что при формировании сигналов управления для настройки коэффициентов ПИД-регулятора используют ручную настройку и/или метод Зиглера-Никольса и/или метод CHR.
| EP 1901153 A1, 19.03.2008 | |||
| СПОСОБ ПОСАДКИ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2005 |
|
RU2278060C1 |
| СПОСОБ ПОСАДКИ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА АЭРОДИНАМИЧЕСКОГО ТИПА | 2005 |
|
RU2278801C1 |
| СИСТЕМА АВТОМАТИЧЕСКОЙ ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 1990 |
|
RU2018785C1 |
| US 20150253140 A1, 10.09.2015 | |||
| US 20150339826 A1, 26.11.2015. | |||

