Область техники, к которой относится изобретение
Изобретение относится к области железнодорожной автоматики и может быть использовано для регулирования движения поездов.
Уровень техники
Известен способ регулирования скорости движения поездов, который воплощен в устройстве КЛУБ. Устройство предназначено для повышения безопасности в поездной и маневровой работе путем приема сигналов АЛС, отображения их машинисту, измерения и отображения скорости движения, исключения несанкционированного трогания локомотива, контроля скорости движения, контроля торможения перед светофором с запрещающим сигналом, контроля бодрствования и бдительности машиниста, формирования сигналов для системы автоматического управления торможением (САУТ).
Локомотивный блок индикации отображает машинисту локомотива следующую информацию:
- сигналы светофоров (зеленый, желтый, красно-желтый, красный, белый и белый мигающий;
- количество свободных блок-участков - 5;
- скорость движения локомотива - трехразрядное десятичное число зеленого цвета;
- допустимая скорость проследования впередистоящего путевого светофора (контролируемая скорость) - трехразрядное десятичное число красного цвета;
- допустимая скорость движения в данной точке пути, индицируется вместо допустимой скорости проследования впередистоящего светофора (в тех же знакоместах) при движении к путевому светофору с красным огнем -трехразрядное десятичное число красного цвета;
- направление движения по стрелочному переводу (прямо либо с отклонением) - точечными индикаторами соответственно зеленого и желтого цвета;
- предварительная световая сигнализация контроля бодрствования или контроля бдительности машиниста - индикатором красного цвета.
Недостатками способа является использование напольных и локомотивных светофоров, большое количество жил кабеля, невысокая точность определения координаты хвоста впередиидущего поезда, а также стандартные требования для каждого из блок-участков по их длине с целью обеспеченья снижения скорости или полной остановки поезда. Также недостатками являются большое количество путевых приборов, возложение на машиниста обязанности по определению оптимальной и предельно допустимой скорости по опыту ведения поезда с учетом плана и профиля пути, параметров поезда и недостатков системы пневматических тормозов.
Известен способ регулирования движения поездов системой автоблокировки с централизованным размещением аппаратуры, основанный на контроле состояний рельсовых линий, передаче информации на подвижной состав о количестве свободных впередилежащих рельсовых линий и параметрах маршрута приема (пропуска). Полученная информация о состоянии рельсовых линий обрабатывается программой ЭВМ и совместно с информацией о номере пути приема сквозного или безостановочного пропуска передается по радиоканалу на подвижной состав, находящийся в зоне управления ЭВМ постов ЭЦ. На подвижном составе с учетом принятой по радиоканалам информации с постов ЭЦ, а также информации хранящейся в памяти подвижного состава о параметрах пути, путевого развития станций и поезда, с помощью ЭВМ, определяется допустимая и оптимальная скорость движения подвижного состава для каждой точки пути и выводится на экран локомотивного навигатора в виде кривых скоростей с отметками мест контроля бдительности, подготовки к торможению, начала торможения и места остановки. Также выводятся на экран рекомендованные позиции органов управления, которые устанавливаются посредством механических устройств управления скоростью движения подвижного состава. Вся информация записывается в «черный ящик» для последующего анализа при сбое в регулировании скорости подвижного состава, а также для реализации функции самообучения. Во время движения поезда машинист контролирует совпадение рекомендованной и фактической скорости движения [Патент РФ 2662313 Способ регулирования движения поездов системой автоблокировки с централизованным размещением аппаратуры. Полевой Ю.И., Горелик А.В. Опубликовано: 25.07.2018. Бюл. №21.].
Недостатками способа является то, что при определении места прицельного торможения не учитываются такие важные факторы как недостатки пневматических тормозов, погрешности приборов, смещение места остановки поезда из-за градаций веса и скорости поезда, инерционность переключения механических устройств, условий сцепления колеса с рельсом.
Данное техническое решение выбрано в качестве прототипа.
Раскрытие изобретения
Техническим результатом, на достижение которого направлено техническое решение, является повышение надежности автоматического торможения на участке сближения поезда с препятствием с учетом влияющих факторов.
Для достижения технического результата предложен способ автоматического регулирования скорости движения поезда на участке сближения с препятствием с учетом параметров пути и подвижного состава с участием локомотивной ЭВМ, при котором определяют оптимальную скорость движения поезда для каждой точки пути и выводят на экран локомотивного навигатора в виде кривой скорости с отметками мест контроля бдительности, осуществляют подготовку к торможению и начало торможения, определяют место остановки головы поезда, а также выводят на экран рекомендованные позиции органов управления скоростью, которые устанавливают посредством электромеханических устройств управления скоростью движения подвижного состава. На участке перед участком торможения проверяют наличие нормативного давления в тормозной магистрали, а на участке торможения учитывают за счет увеличения плановой длины тормозного пути: инерционность пневматических тормозов, погрешность приборов, градации веса и скорости поезда, инерционность переключения механических устройств, условия сцепления колеса с рельсом, при этом точку начала торможения переносят на расстояние, которое проходит поезд за время осуществления перечисленных мероприятий, причем в случае выявления недостатков при подготовке к торможению осуществляют автоматическую остановку поезда, контроль освобождения участка пути за хвостом поезда осуществляют по состоянию рельсовых цепей и с учетом сигнала поступающего по каналу ГЛОНАСС, а также с учетом удлинения длины поезда на 4% из-за особенностей конструкции автосцепки, контроль занятия участка пути перед головой движущегося поезда осуществляют также по состоянию рельсовых цепей и с учетом сигнала поступающего по каналу ГЛОНАСС о координате местонахождения локомотива в течении 30 сек: если сигнал о занятии участка пути по каналу ГЛОНАСС не поступает, то все равно осуществляют фиксацию занятия впередилежащего участка пути, что исключает несвоевременную фиксацию занятия участка, и, как следствие, несвоевременную остановку поезда.
Краткое описание чертежей
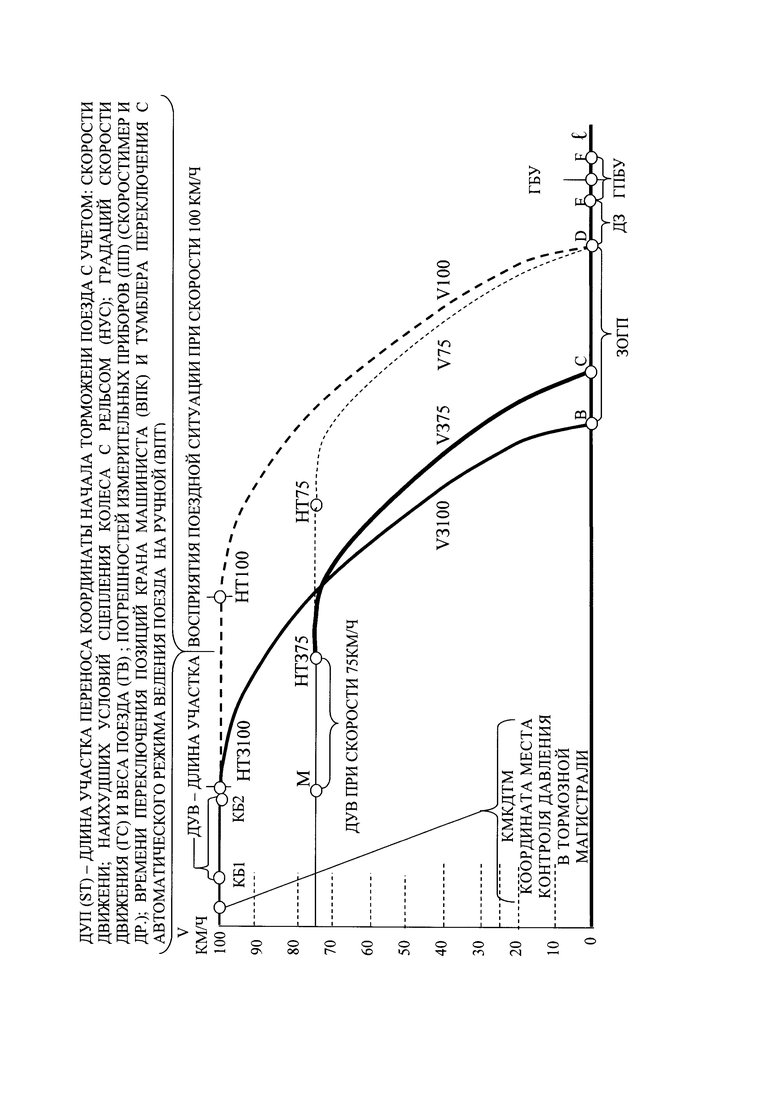
На Фигуре в координатных осях V (скорость поезда) и  (координата головы поезда) представлены кривые торможения с учетом инерционности пневматических тормозов при скорости 100 км/ч - V100 и скорости 75 км/ч -V75, а также кривые с учетом инерционности пневматических тормозов и запасом времени на переключение локомотивных устройств, наихудших условий сцепления колеса с рельсом, градаций скорости движения и веса поезда, погрешностей измерительных приборов (скоростемер и др.), времени переключения позиций крана машиниста и тумблера переключения с автоматического режима ведения поезда на ручной режим при скорости 100 км/ч - VЗ100 и скорости 75 км/ч - VЗ75. Там же отмечены точки начала торможения НТ100, НТ75, НТЗ100, НТЗ75, точка КМКДТМ - координата места контроля давления в тормозной магистрали перед началом торможения, КБ1 и КБ2 - точки контроля бдительности машиниста, а также точки В, С, D, Е, F, М и ГБУ - граница блок-участка (пределы плавающей границы ГПБУ находятся между точками Т и F); отрезки ДУП (ST) - длина участка переноса координаты начала торможения поезда, ДУВ - длина участка восприятия поездной ситуации, ЗОГП - зона остановки головы поезда, ДЗ - дополнительный (гарантийный) запас тормозного пути.
(координата головы поезда) представлены кривые торможения с учетом инерционности пневматических тормозов при скорости 100 км/ч - V100 и скорости 75 км/ч -V75, а также кривые с учетом инерционности пневматических тормозов и запасом времени на переключение локомотивных устройств, наихудших условий сцепления колеса с рельсом, градаций скорости движения и веса поезда, погрешностей измерительных приборов (скоростемер и др.), времени переключения позиций крана машиниста и тумблера переключения с автоматического режима ведения поезда на ручной режим при скорости 100 км/ч - VЗ100 и скорости 75 км/ч - VЗ75. Там же отмечены точки начала торможения НТ100, НТ75, НТЗ100, НТЗ75, точка КМКДТМ - координата места контроля давления в тормозной магистрали перед началом торможения, КБ1 и КБ2 - точки контроля бдительности машиниста, а также точки В, С, D, Е, F, М и ГБУ - граница блок-участка (пределы плавающей границы ГПБУ находятся между точками Т и F); отрезки ДУП (ST) - длина участка переноса координаты начала торможения поезда, ДУВ - длина участка восприятия поездной ситуации, ЗОГП - зона остановки головы поезда, ДЗ - дополнительный (гарантийный) запас тормозного пути.
ДУП (ST) - длина участка переноса координаты начала торможения поезда определяется с учетом скорости движении поезда V, наихудших условий сцепления колеса с рельсом (НУС), градаций скорости движения (ГС) и веса поезда (ГВ), погрешностей измерительных приборов (ПП) (скоростемер и др.), времени переключения позиций крана машиниста (ВПК) и тумблера переключения с автоматического режима ведения поезда на ручной (ВПТ).
Осуществление изобретения
Регулирование скорости движения поездов на участке сближения с препятствием зависит от целого ряда факторов. Препятствиями являются: граница блок-участка БУ, граница станции ГС при приеме поезда, граница приемоотправочного пути ПО при отправлении поезда.
Целью предложенного способа является разработка такого способа автоматического регулирования скорости движения поездов на участке сближения с препятствием, который бы позволил обеспечить безопасность движения поездов без участия человека, но под его контролем. При этом необходимо учесть недостатки пневматического тормоза (инерционность и истощаемость), плавающие границы рельсовых цепей без изолирующих стыков (из-за продольной асимметрии сопротивления изоляции, колебаний сопротивлении изоляции при разных длинах смежных участков и т.д.), задержки реализации приказа на торможение (из-за изменения коэффициента сцепления между рельсами и колесами подвижного состава), градациями скорости движения и веса поезда, погрешностями измерительных приборов, временем переключения автоматического режима ведения поезда на ручной, переключениями рукоятки крана машиниста, дополнительным запасом длины участка торможения (по не учтенным параметрам). Кроме того, необходимо обеспечить рабочее давление в тормозной магистрали к моменту начала торможения (недостаток истощаемых тормозов) и учесть инерционность пневматических тормозов посредством опережающего включения тормозов. Фиксация вступления локомотива на впередилежащую рельсовую цепь осуществляется с участием ГЛОНАСС, освобождение хвостом поезда предыдущей рельсовой цепи осуществляется также с участием ГЛОНАСС, а так же с учетом того, что поезд может растягиваться на 4% его длины из-за особенностей конструкции автосцепки.
На Фигуре представлены кривые скорости при начальной скорости движения V100 км/ч и V75 км/ч с учетом инерционности пневматических тормозов, а также кривые VЗ100 км/ч, VЗ75 км/ч при тех же скоростях с учетом инерционности пневматических тормозов, увеличения времени торможения из-за плохих условий сцепления колеса с рельсом; градаций скорости движения и веса поезда; погрешностей измерительных приборов (скоростемер и др.); времени переключения позиций крана машиниста и тумблера переключения с автоматического режима ведения поезда на ручной режим. Также на Фигуре показана КМКДТМ - координата места контроля давления в тормозной магистрали. Учет перечисленных параметров при реализации автоматического торможения на участке сближения с препятствием существенно повышает безопасность движения поездов.
На кривой V100 точками НТ100 и НТЗ100 отмечены места начала торможения соответственно в отсутствии запаса времени на выполнении мероприятий по подготовке к торможению и при наличии такого запаса. На кривой У75 точками НТ75 и НТЗ75 отмечены места начала торможения соответственно в отсутствии запаса времени на выполнении мероприятий по подготовке к торможению и при наличии такого запаса. Отрезок на кривой скорости между точками НТ100 и НТЗ100 является участком длиной ST, время следования головы поезда по которому составляет общее (суммарное) время подготовки поезда к торможению. Если мероприятия по подготовке к торможению будут выполнены при максимальных затратах времени, то торможение будет осуществляться по кривой VЗ100, если при минимальных затратах (время исполнения минимально, относительно близко нулю) - то по кривой V100, в остальных случаях остановка поезда будет происходить на участке ЗОГП - в зоне остановки головы поезда (между точкам В и D). Если скорость поезда будет меньше, например, 75 км/ч, то место остановки поезда будет находиться на участке между точками С и D, а ДУВ (длина участка на котором происходит восприятие поездной ситуации (вместо показания сигнала светофора)) будет между точками М и НТЗ75.
Для составления уравнения определения ST (участок пути, проходимый поездом за время подготовки к торможению) необходимо ввести следующие обозначения: скорость движения поезда V; наихудшие условия сцепления колеса с рельсом (НУС); градации скорости движения (ГС) и веса поезда (ГВ); погрешности измерительных приборов (ПП) (скоростимер и др.); временя переключения позиций крана машиниста (ВПК) и тумблера переключения с автоматического режима ведения поезда на ручной режим (ВПТ).
Длина ST=V⋅(Тнус+Тгс+Тгв+Тпп+Твпк+Твпт), где Тнус - время учитывающее увеличение тормозного пути за счет плохого сцепления колес с рельсом, Тгс - время потерь из-за градаций скорости, Тгв - время потерь из-за градаций веса поезда, Тпп - время потерь из-за погрешностей приборов, Твпк - время потерь из-за переключения крана машиниста, Твпт - время потерь из-за переключения тумблера на переключение с автоматического на ручной режим. Длина участка восприятия поездного положения машинистом определяется расстоянием, проходимым поездом за 30 сек. К моменту торможения в тормозной магистрали должно быть нормативное давление, т.е. от точки КМКДТМ до точки начала торможения должно быть расстояние, которое проходит поезд при скорости V за время достаточное для зарядки тормозной магистрали. В начале участка восприятия поездной ситуации (КБ1) и перед началом торможения (КБ2) должен осуществляться контроль бдительности машиниста.
Если расстояние от плановой остановки поезда до границы блок-участка выбирается при наихудшем сочетании условий (точка Е), то устанавливается дополнительный запас пути торможения ДЗ.
Для отслеживания координаты хвоста поезда с помощью ГЛОНАСС (определения точки начала набора скорости) должно быть учтено то, что длина поезда может изменяться на ±4% из-за особенностей конструкции автосцепки.
Способ автоматического регулирования скорости движения поезда на участке сближения с препятствием с учетом параметров пути и подвижного состава с участием локомотивной ЭВМ реализуется следующим образом. Во-первых, определяется оптимальная скорость движения поезда для каждой точки пути и выводится на экран локомотивного навигатора в виде кривой скорости с отметками мест контроля бдительности. Во-вторых, осуществляется подготовка к торможению и торможение с учетом планируемого места остановки головы поезда. Выводятся на экран рекомендованные позиции органов управления и устанавливаются посредством электромеханических устройств управления скоростью движения подвижного состава локомотивный контроллер и кран машиниста. В-третьих, на участке перед участком торможения проверяется наличие нормативного давления в тормозной магистрали (первый недостаток пневматического тормоза). В-четвертых, на участке торможения учитываются (посредством увеличения плановой длины тормозного пути): инерционность пневматических тормозов (второй недостаток пневматического тормоза), погрешность приборов, градации веса и скорости поезда, инерционность переключения механических устройств, условия сцепления колеса с рельсом, при этом точка начала торможения переносится на расстояние, которое проходит поезд за время осуществления перечисленных мероприятий. В случае выявления недостатков при подготовке к торможению осуществляется автоматическая остановка поезда. Контроль освобождения участка пути за хвостом поезда осуществляется по состоянию рельсовых цепей и с учетом сигнала поступающего по каналу ГЛОНАСС, а также с учетом удлинения (растяжения поезда) поезда на 4% из-за особенностей конструкции автосцепки. Контроль занятия участка пути перед головой движущегося поезда осуществляется также по состоянию рельсовых цепей и с учетом сигналов поступающих по каналу ГЛОНАСС о координате местонахождения локомотива в течение 30 с. Если сигнал о занятии участка пути по каналу ГЛОНАСС в течении 30 с. не поступает, то все равно фиксируется занятие впередилежащего участка пути. Такой алгоритм контроля занятия впередилежащего участка исключает несвоевременную фиксацию занятия участка, и, как следствие, несвоевременную остановку поезда.
При выполнении представленного регламента ведения поезда может быть обеспечена необходимая безопасность движения поездов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОТОБРАЖЕНИЯ ИНФОРМАЦИИ НА ЛОКОМОТИВЕ ДЛЯ КОНТРОЛЯ ЗА ДВИЖЕНИЕМ ПОЕЗДА | 2019 |
|
RU2723513C1 |
| СПОСОБ ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ, ДОПУСКАЮЩИЙ НАХОЖДЕНИЕ ДВУХ ПОЕЗДОВ НА ОДНОМ БЛОК-УЧАСТКЕ, СОСТОЯЩЕМ ИЗ НЕСКОЛЬКИХ КООРДИНАТНЫХ ОТРЕЗКОВ | 2021 |
|
RU2768305C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ СИСТЕМОЙ АВТОБЛОКИРОВКИ С ЦЕНТРАЛИЗОВАННЫМ РАЗМЕЩЕНИЕМ АППАРАТУРЫ | 2017 |
|
RU2662313C1 |
| СПОСОБ ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ РЕЖИМОВ ДВИЖЕНИЯ ПОЕЗДОВ | 2021 |
|
RU2768303C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ И МАНЕВРОВЫХ СОСТАВОВ С ПОМОЩЬЮ ЭВМ БЕЗ ОПАСНЫХ ОТКАЗОВ | 2017 |
|
RU2673315C1 |
| СПОСОБ ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ С ПРИМЕНЕНИЕМ КООРДИНАТНЫХ ОТРЕЗКОВ БЕЗ БЛОК-УЧАСТКОВ И ПУТЕВЫХ СВЕТОФОРОВ | 2021 |
|
RU2789232C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ | 2019 |
|
RU2714824C1 |
| СПОСОБ ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ С ПРИМЕНЕНИЕМ КООРДИНАТНЫХ ОТРЕЗКОВ | 2021 |
|
RU2789420C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ НА ПЕРЕГОНЕ БЕЗ НАПОЛЬНЫХ УСТРОЙСТВ ЖЕЛЕЗНОДОРОЖНОЙ АВТОМАТИКИ | 2019 |
|
RU2712364C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ С ПОМОЩЬЮ РАДИОСИГНАЛОВ | 2019 |
|
RU2714962C1 |
Изобретение относится к средствам автоматического регулирования движения поездов. В способе с учетом параметров пути и подвижного состава с участием локомотивной ЭВМ определяют оптимальную скорость движения поезда для каждой точки пути и выводят на экран локомотивного навигатора в виде кривой скорости с отметками мест контроля бдительности, осуществляют подготовку к торможению и начало торможения, определяют место остановки головы поезда, перед участком торможения проверяют наличие нормативного давления в тормозной магистрали, а на участке торможения учитывают за счет увеличения плановой длины тормозного пути: инерционность пневматических тормозов, погрешность приборов, градации веса и скорости поезда, инерционность переключения механических устройств, условия сцепления колеса с рельсом. При этом точку начала торможения переносят на расстояние, которое проходит поезд за время осуществления перечисленных мероприятий, причем в случае выявления недостатков при подготовке к торможению осуществляют автоматическую остановку поезда, контроль освобождения участка пути за хвостом поезда осуществляют по состоянию рельсовых цепей и с учетом сигнала, поступающего по каналу ГЛОНАСС, а также с учетом удлинения длины поезда на 4% из-за особенностей конструкции автосцепки, контроль занятия участка пути перед головой движущегося поезда осуществляют также по состоянию рельсовых цепей и с учетом сигнала, поступающего по каналу ГЛОНАСС, о координате местонахождения локомотива в течение 30 с, если сигнал по каналу ГЛОНАСС не поступает, то все равно осуществляют фиксацию занятия впередилежащего участка пути, что исключает несвоевременную фиксацию занятия участка и несвоевременную остановку поезда. Достигается повышение безопасности движения поездов. 1 ил.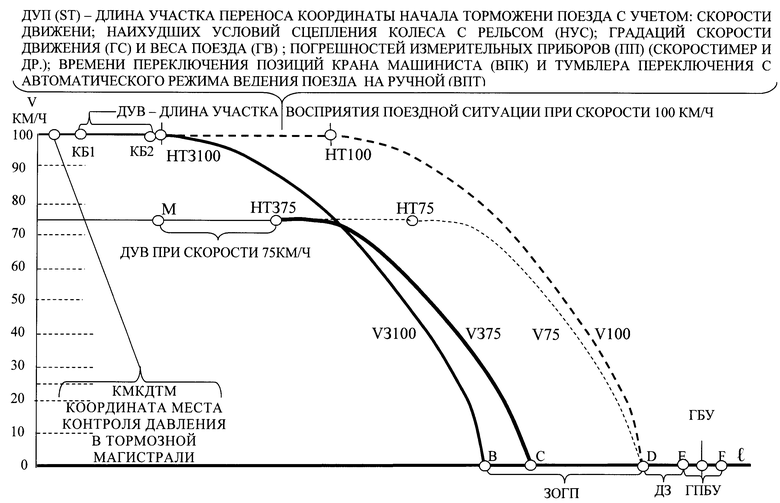
Способ автоматического регулирования скорости движения поезда на участке сближения с препятствием с учетом параметров пути и подвижного состава с участием локомотивной ЭВМ, при котором определяют оптимальную скорость движения поезда для каждой точки пути и выводят на экран локомотивного навигатора в виде кривой скорости с отметками мест контроля бдительности, осуществляют подготовку к торможению и начало торможения, определяют место остановки головы поезда, а также выводят на экран рекомендованные позиции органов управления скоростью, которые устанавливают посредством электромеханических устройств управления скоростью движения подвижного состава, отличающийся тем, что на участке перед участком торможения проверяют наличие нормативного давления в тормозной магистрали, а на участке торможения учитывают за счет увеличения плановой длины тормозного пути: инерционность пневматических тормозов, погрешность приборов, градации веса и скорости поезда, инерционность переключения механических устройств, условия сцепления колеса с рельсом, при этом точку начала торможения переносят на расстояние, которое проходит поезд за время осуществления перечисленных мероприятий, причем в случае выявления недостатков при подготовке к торможению осуществляют автоматическую остановку поезда, контроль освобождения участка пути за хвостом поезда осуществляют по состоянию рельсовых цепей и с учетом сигнала, поступающего по каналу ГЛОНАСС, а также с учетом удлинения длины поезда на 4% из-за особенностей конструкции автосцепки, контроль занятия участка пути перед головой движущегося поезда осуществляют также по состоянию рельсовых цепей и с учетом сигнала, поступающего по каналу ГЛОНАСС, о координате местонахождения локомотива в течение 30 с, если сигнал о занятии участка пути по каналу ГЛОНАСС не поступает, то все равно осуществляют фиксацию занятия впередилежащего участка пути, что исключает несвоевременную фиксацию занятия участка и, как следствие, несвоевременную остановку поезда.
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ СИСТЕМОЙ АВТОБЛОКИРОВКИ С ЦЕНТРАЛИЗОВАННЫМ РАЗМЕЩЕНИЕМ АППАРАТУРЫ | 2017 |
|
RU2662313C1 |
| Система интервального регулирования движения поездов на основе спутниковых навигационных средств и цифрового радиоканала с координатным методом контроля | 2016 |
|
RU2618659C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ | 2017 |
|
RU2655106C1 |
| Система интервального регулирования движения поездов | 2017 |
|
RU2653672C1 |
| СПОСОБ ИСКЛЮЧЕНИЯ НЕГАТИВНОГО ВЛИЯНИЯ ПОТЕРИ ШУНТА | 2018 |
|
RU2684161C1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |

