Область техники, к которой относится изобретение
Изобретение относится к области железнодорожной автоматики и телемеханики и может быть использовано для регулирования движения поездов.
Уровень техники
Известен способ регулирования движения поездов с использованием тональных рельсовых цепей с централизованным расположением аппаратуры [Типовые материалы для проектирования 410306-ТМП, АВТОБЛОКИРОВКА С ТОНАЛЬНЫМИ РЕЛЬСОВЫМИ ЦЕПЯМИ И ЦЕНТРАЛИЗОВАННЫМ РАЗМЕЩЕНИЕМ ОБОРУДОВАНИЯ, АБТЦ-03. ОАО «РЖД» Филиал института по проектированию сигнализации, централизации, связи и радио на железнодорожном транспорте «ГИПРОТРАНССИГНАЛСВЯЗЬ». 2004 г.]. Информация о состоянии путевых участков формируется с помощью рельсовых цепей и по линейным проводам передается на прилегающие к перегону станции. На подвижной состав информация о состоянии впереди лежащих путевых участков передается с помощью оптических устройств и системы АЛС.
Недостатками системы является использование напольных и локомотивных светофоров, большая жильность кабеля, невысокая точность определения координаты хвоста поезда, а также стандартные требования для каждого из блок-участков по их длине с целью обеспечения снижения скорости или полной остановки поезда, использование нескольких несущих и модулирующих частот, а так же большого количества путевых приборов, определение оптимальной и предельно допустимой скорости по опыту ведения поезда машинистом с учетом плана и профиля пути, параметров поезда и недостатков системы пневматических тормозов.
Известен способ регулирования движения поездов и маневровых составов с помощью ЭВМ без опасных отказов, основанный на использовании троированной ЭВМ, на вход которой поступает информация о контролируемых объектах, а управление объектами осуществляется с использованием мажоритарной логики (три из трех или два из трех), в памяти ЭВМ содержится информация о путевом развитии станции, плане и профиле пути, циклически вводится информация о состоянии напольных перегонных и станционных устройств, о параметрах поездов и местах их нахождения, команды от диспетчера, сменного помощника начальника станции, машиниста-составителя, полученная информация обрабатывается, формируются команды на управления стрелками, а также команды, передаваемые по радиоканалу на локомотив на поддержание оптимальной скорости движения поездов в каждой точке пути (кривая скорости), информация о фактической скорости, позиции крана машиниста и локомотивного контроллера, которые приводятся в требуемое положение электромеханическими устройствами, точках контроля бдительности машиниста, подготовки к торможению, начала торможения, прицельного торможения [Патент 2673315 (РФ). Способ регулирования движения поездов и маневровых составов с помощью ЭВМ без опасных отказов /Полевой Ю.И. Горелик А.В. - Опубл. Бюл. 23.11.2018, №33, МПК В61С 17/12].
Недостатком способа являются необходимость использования перегонных рельсовых цепей для контроля свободности путевых участков и целостности рельсовых нитей.
Данное техническое решение выбрано в качестве прототипа.
Раскрытие изобретения
Техническим результатом, на достижение которого направлено данное техническое решение, является осуществление регулирования движения поездов без напольных устройств на перегонах. На перегонах предусмотрены только рельсовые соединители для пропуска обратного тягового тока, перемычки между рельсами одного, двух или нескольких путей для уравнивания тягового тока в рельсах, устройства переездной сигнализации, освещение переездов, и высоковольтные линии для их питания.
Способ регулирования движения поездов, основанный на использовании локомотивной ЭВМ - ЭВМЛ, на вход которой по радиоканалу циклически поступает информация о состоянии перегонных и станционных путевых участков, о положении стрелок;
на вход ЭВМЛ также поступает информация о фактической скорости поезда, позиции крана машиниста и позиции локомотивного контроллера, которые приводятся в требуемое положение с помощью блока управления движением поезда (электромеханическое устройство);
в памяти ЭВМ хранится информация о параметрах поезда, схематических планах станций, плане и профиле пути, марках стрелочных крестовин, отличающийся тем, что
на постах диспетчерской централизации размещены ЭВМ - ЭВМК, которые контролируют движение поездов диспетчерских кругов, вносят коррективы, определяют время входа и выхода каждого поезда со станций;
на станциях размещены устройства микропроцессорной централизации с дополнительными функциями определения допустимых скоростей в каждой точке пути для каждого из поездов, находящихся в зоне радиосвязи, которая распространяется от оси одной смежной станции до оси другой смежной станции, и передачи приказа о принудительном снижении скорости на поезда, скорость которых приближается к допустимой;
на локомотивах размещены устройства контроля движения поезда (фактическая скорость, позиции органов управления и др.), целостности рельсовых нитей, местонахождения локомотива, устройства радиосвязи с двумя ближайшими станциями и хвостовым многофункциональным блоком;
между двумя последними вагонами поезда размещен дополнительный кран тормозной магистрали и хвостовой многофункциональный блок для двухсторонней связи с локомотивом, управления дополнительным краном тормозной магистрали, контроля местонахождения последнего вагона, передачи информации о состоянии рельсовых нитей мобильного контрольного участка между колесными парами двух последних вагонов;
контроль целостности рельсовых нитей мобильного участка осуществляется за счет подключения мобильного генератора к шунтам (колесные пары двух последних вагонов), ограничивающих контрольный участок, и сравнения текущего тока генератора с интегрированным (усредненным) значением тока, измеренным в течение нескольких секунд (около 5 с);
при превышении интегрированного значения тока над текущим значением вырабатывается сигнал для кратковременного прекращения передачи информации о координате местонахождения вагона, что позволяет определить место повреждения рельса;
с хвостового многофункционального блока передается информация на локомотив о местонахождении последнего вагона и месте повреждения рельсовой нити, а также о величине давления в тормозной магистрали;
с локомотива на хвостовой многофункциональный блок передается информация для управления дополнительным краном тормозной магистрали для снижения инерционности действия пневматических тормозов;
на локомотиве осуществляется контроль целостности рельсов мобильного контрольного участка между локомотивными секциями, по аналогии с тем, как это осуществляется между двумя последними вагонами поезда;
с локомотива на ближайшие станции передается информация о номере поезда, местонахождении локомотива и последнего вагона, целостности рельсов на каждом контрольном участке;
со станций на локомотивы по радиосвязи передается информация о состоянии путевых участков, находящихся в зоне контроля станционных устройств (станционные путевые участки, путевые участки перегонов (половина перегона), прилегающих к станциям), положении маршрутных стрелок, времени входа и выхода поездов со станции;
с учетом принимаемой и хранящейся в памяти ЭВМЛ информации (о параметрах поезда и пути) ЭВМЛ рассчитывает допустимую и оптимальную скорости движения, и посредством блока управления движением поезда регулирует скорость движения;
в памяти ЭВМЛ хранится информация о координатах изолирующих стыков для того, чтобы можно было отличить повреждение рельсовой нити от изолирующего стыка;
полученная на станциях с локомотивов информация полностью характеризует состояние перегонных путевых участков, а именно их свободность/занятость, целостность/неисправность рельсовых нитей;
Краткое описание чертежей
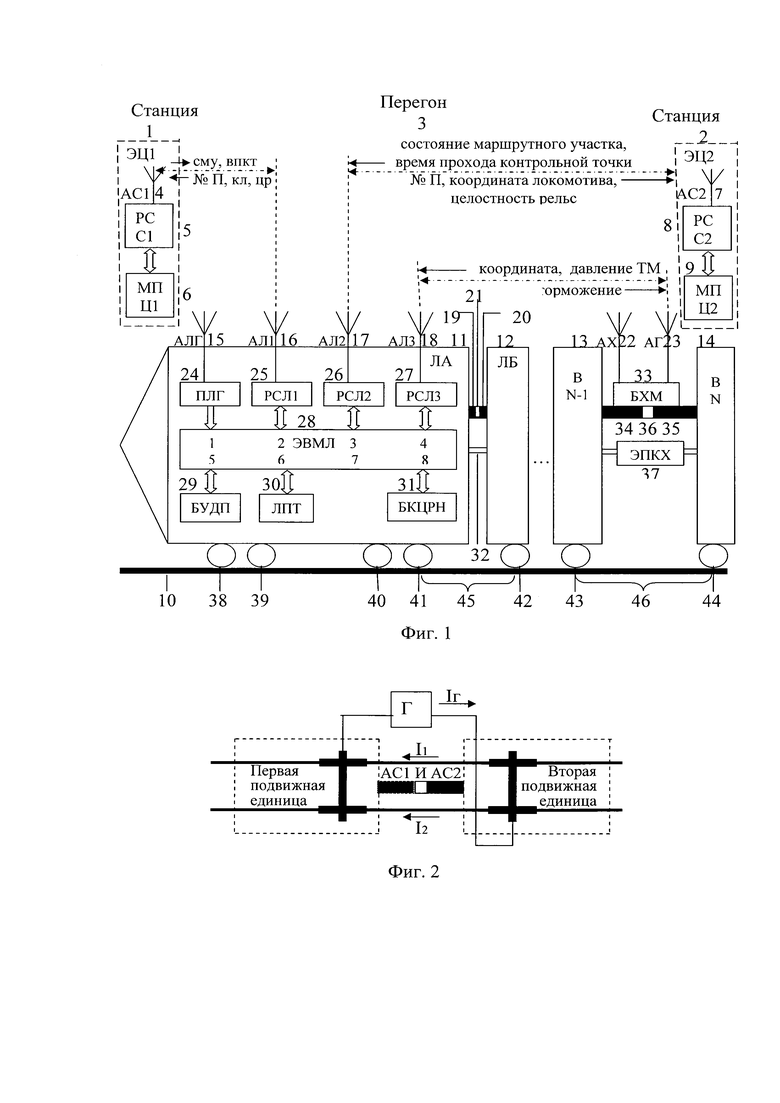
На фиг. 1 представлена структурная схема устройств служащих для реализации способа регулирования движения поездов без напольных устройств; на фиг. 2 - структурная схема устройства контроля целостности рельсовых нитей.
Описание изобретения
На фиг. 1 приведены следующие обозначения устройств реализации способа регулирования движения поездов:
1 - первая станция;
2 - вторая станция;
3 - перегон;
4 - антенна первой ж.д. станции АС 1;
5 - радиостанция первой ж.д. станции РСС1;
6 - микропроцессорная централизация с дополнительными функциями первой ж.д. станции МПЦ1;
7 - антенна второй ж.д. станции АС2;
8 - радиостанция второй ж.д. станции РСС2;
9 - микропроцессорная централизация с дополнительными функциями второй ж.д. станции МПЦ2;
10 - рельс;
11 - локомотивная секция ЛА;
12 - локомотивная секция ЛБ;
13 - предпоследний вагон поезда BN-1;
14 - последний вагон поезда BN;
15 - локомотивная антенна ГЛОНАСС АЛГ;
16 - первая локомотивная антенна АЛ1 для связи с одной из ближайших станций;
17 - вторая локомотивная антенна АЛ2 для связи с другой ближайшей станцией;
18 - третья локомотивная антенна АЛ3 для связи с радиостанцией последнего вагона поезда;
19 - конструкция автосцепки секции А локомотива;
20 - конструкция автосцепки секции Б локомотива;
21 - изолятор автосцепки между локомотивными секциями;
22 - антенна хвостовой радиостанции АХ;
23 - антенна хвостового приемника ГЛОНАСС АГ;
24 - локомотивный приемник ГЛОНАСС для определения местонахождения локомотива ПЛГ;
25 - первая локомотивная радиостанция РСЛ1 для связи с одной из ближайших станций;
26 - вторая локомотивная радиостанция РСЛ2 для связи с другой ближайшей станцией;
27 - третья локомотивная радиостанция РСЛ3 для связи с радиостанцией последнего вагона;
28 - локомотивная ЭВМ - ЭВМЛ;
29 - блок управления движением поезда БУДП (электромеханический блок);
30 - локомотивное пульт-табло ЛПТ;
31 - блок контроля целостности рельсовой нити БКЦРН;
32 - тормозной шланг между вагонами;
33 - блок хвостовой многофункциональный БХМ;
34 - конструкция автосцепки предпоследнего вагона;
35 - конструкция автосцепки последнего вагона;
36 - изолятор автосцепки между последними вагонами;
37 - хвостовой электропневматический клапан ЭПКХ;
38, 39, 40, 41, 42, 43 и 44 колесные пары секций локомотива и двух последних вагонов;
45 - мобильный контрольный участок пути под локомотивом;
46 - мобильный контрольный участок пути под двумя последними вагонами.
На фиг. 2 приведены следующие обозначения приборов структурной схемы контроля целостности рельсовых нитей:
Г - мобильный генератор для контроля целостности рельсовых нитей; АС1 и АС2 - узлы автосцепки первой и второй подвижных единиц;
И - изолятор между подвижными единицами;
IГ, I1, I2 - ток генератора, первого и второго рельсов соответственно.
Для оптимизации регулирования движения поездов и повышения безопасности движения предусмотрены следующие устройства и технологии. На посту диспетчерской централизации предусмотрена ЭВМ - ЭВМК (диспетчерского круга), которая контролирует движение поездов, вносит коррективы, определяет время входа и выхода каждого поезда со станции.
Устройство микропроцессорной централизации выполняет дополнительные функции: определяет допустимую скорость для каждой точки пути для поездов, находящихся в зоне радиосвязи, которая распространяется от оси одной смежной станции до оси другой смежной станции, и передает приказа о принудительном снижении скорости на поезда, скорость которых приближается к допустимой.
ЭВМЛ с учетом принимаемой по радиосвязи и хранящейся в памяти ЭВМЛ информация (о параметрах поезда и пути) рассчитывает допустимую и оптимальную скорости движения, и посредством блока управления движением поезда регулирует скорость движения.
В памяти ЭВМЛ хранится информация о координатах изолирующих стыков для того, чтобы можно было отличить повреждение рельсовой нити от изолирующего стыка.
Для демонстрации действия способа на фиг. 1 и 2 представлены структурные схемы устройства регулирования движения поездов на перегоне без напольных приборов ж.д. автоматики и устройства контроля целостности рельсовых нитей.
Полученная на станциях с локомотивов по радиосвязи информация полностью характеризует состояние перегонных путевых участков, а именно их свободность/занятость, целостность/неисправность рельсовых нитей;
На фиг. 1 представлены станционные устройства первой станции 1, второй станции 2, локомотивные устройства секции А 11, локомотивная секция Б 12, последние вагоны поезда 13 и 14, многофункциональный хвостовой блок 33 и хвостовой кран тормозной магистрали 37. Локомотивная секция А имеет антенну ГЛОНАСС АЛГ 15, антенну для связи с первой станцией АЛ1 16, антенну для связи со второй станцией АЛ2 17 и антенну для связи с хвостовым многофункциональным блоком АЛ3 18, также локомотивный преемник ГЛОНАСС ПГЛ 24, первую локомотивную радиостанцию РСЛ1 25, вторую локомотивную радиостанцию РСЛ2 26, третью радиостанцию РСЛ3 27. Кроме того на локомотиве предусмотрены блок управления движением поезда БУДП 29 (электромеханическое устройство) для переключения позиций локомотивного котроллера и крана машиниста, локомотивное пульт-табло ЛПТ 30 для контроля и управления движением поезда, блок контроля целостности рельсовых нитей БКЦРН 31 для контроля целостности рельсов на мобильном контрольном участке под локомотивом. Контрольным участком является рельсовая линия 45 ограниченная колесными парами локомотивными секциями А 11 и Б 12.
Вторым контрольным участком 46 является рельсовая линия ограниченная колесными парами двух последних вагонов 13 и 14. Между этими вагонами устанавливается хвостовой электропневматический клапан ЭПКХ 37, положение которого регулирует ЭВМЛ 28 с участием третьей локомотивной радиостанции РСЛ3 27, антенны АЛ3 18, антенны АХ 22, устройств, размещенных в блоке БХМ 33 (радиостанция, ключ включения ЭПКХ; на фиг. 2 не отображены). Клапан ЭПКХ 37 по приказу с локомотивной ЭВМ 28 выпускает воздух тормозной магистрали в атмосферу, что существенно снижает инерционность действия пневматического тормоза.
В блоке БХМ предусмотрен манометр для измерения давления воздуха в тормозной магистрали, информация от которого передается на локомотив по тому же радиоканалу (радиостанция БХМ - радиостанция РСЛ3). Кроме того, на локомотив передается информация о местонахождении последнего вагона, которая определяется приемником ГЛОНАСС, который также находится в блоке БХМ 33 (на фиг. 1 не представлен).
С локомотива полученная информация, вместе с координатой местонахождения локомотива, передается с участием локомотивных радиостанций РСЛ1 25 и РСЛ2 26, локомотивных антенн АЛ1 16 и АЛ2 17, станционных радиостанций РСС1 5 и РСС2 8, станционных антенн АС1 4 и АС2 7 на МПЦ1 6 и МПЦ2 9 первой и второй станций соответственно. По принятой на станциях информации определяется координаты повреждения рельсов, локомотивов, последних вагонов поездов. В памяти станционных МПЦ (6 и 9) хранится информация о параметрах поездов, станций и перегонов, что дает возможность проверить безопасность режима ведения поезда, целостность каждого поезда, и позволяет предотвратить опасную ситуацию в случае превышения скорости движущемся поездом или повреждения рельсовых нитей.
Со станций на локомотивы передается информация о состоянии путевых участков станций и прилегающих перегонов (половина перегона с каждой стороны станции), положении маршрутных стрелок. Эта информация является общей для всех поездов (формируется один приказ для всех поездов находящихся в зоне связи) и принимается ими в зоне связи локомотивных радиостанций со станционными (между осями смежных станций). Каждая станционная радиостанция имеет двустороннюю связь с локомотивными радиостанциями на участке меду осями станций смежных с рассматриваемой станцией. Кроме того, для каждого поезда формируется отдельный приказ с указанием его номера и времени входа на станцию и выхода с нее (границы станций и приемоотправочных путей).
Изобретение относится к железнодорожной автоматике для регулирования движения поездов. Способ основан на использовании локомотивной ЭВМ, на вход которой по радиоканалу циклически поступает информация о состоянии перегонных и станционных путевых участков, о положении стрелок, времени входа и выхода поездов со станций; а на вход станционной ЭВМ поступает информация о местонахождении головы и хвоста поезда, а также о координатах мест повреждения рельсовых нитей, позволяет осуществить регулирование движения поездов без перегонных напольных устройств железнодорожной автоматики в отсутствии на перегонах переездов. Достигается возможность обеспечения регулирования движения поездов без напольных устройств на перегонах. 2 ил.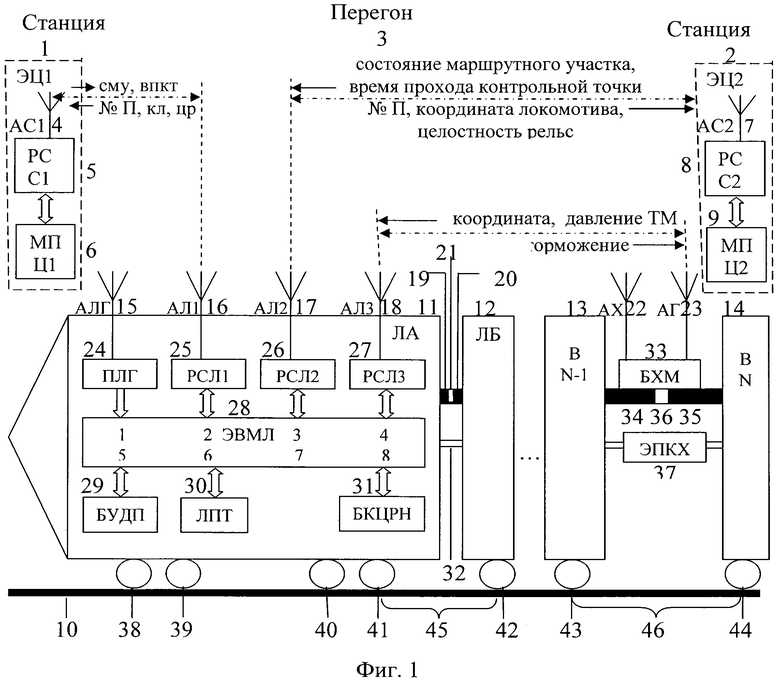
Способ регулирования движения поездов, основанный на использовании локомотивной ЭВМ - ЭВМЛ, на вход которой по радиоканалу циклически поступает информация о состоянии перегонных и станционных путевых участков, о положении стрелок;
на вход ЭВМЛ также поступает информация о фактической скорости поезда, позиции крана машиниста и позиции локомотивного контроллера, которые приводятся в требуемое положение с помощью блока управления движением поезда;
в памяти ЭВМ хранится информация о параметрах поезда, схематических планах станций, плане и профиле пути, марках стрелочных крестовин, отличающийся тем, что
на постах диспетчерской централизации размещены ЭВМ - ЭВМК, которые контролируют движение поездов диспетчерских кругов, вносят коррективы, определяют время входа и выхода каждого поезда со станций;
на станциях размещены устройства микропроцессорной централизации с дополнительными функциями определения допустимых скоростей в каждой точке пути для каждого из поездов, находящихся в зоне радиосвязи, которая распространяется от оси одной смежной станции до оси другой смежной станции, и передачи приказа о принудительном снижении скорости на поезда, скорость которых приближается к допустимой;
на локомотивах размещены устройства контроля движения поезда, целостности рельсовых нитей, местонахождения локомотива, устройства радиосвязи с двумя ближайшими станциями и хвостовым многофункциональным блоком;
между двумя последними вагонами поезда размещен дополнительный кран тормозной магистрали и хвостовой многофункциональный блок для двухсторонней связи с локомотивом, управления дополнительным краном тормозной магистрали, контроля местонахождения последнего вагона, передачи информации о состоянии рельсовых нитей мобильного контрольного участка между колесными парами двух последних вагонов;
контроль целостности рельсовых нитей мобильного участка осуществляется за счет подключения мобильного генератора к шунтам, ограничивающих контрольный участок, и сравнения текущего тока генератора с интегрированным значением тока, измеренным в течение нескольких секунд;
при превышении интегрированного значения тока над текущим значением вырабатывается сигнал для кратковременного прекращения передачи информации о координате местонахождения вагона, что позволяет определить место повреждения рельса;
с хвостового многофункционального блока передается информация на локомотив о местонахождении последнего вагона и месте повреждения рельсовой нити, а также о величине давления в тормозной магистрали;
с локомотива на хвостовой многофункциональный блок передается информация для управления дополнительным краном тормозной магистрали для снижения инерционности действия пневматических тормозов;
на локомотиве осуществляется контроль целостности рельсов мобильного контрольного участка между локомотивными секциями, по аналогии с тем, как это осуществляется между двумя последними вагонами поезда;
с локомотива на ближайшие станции передается информация о номере поезда, местонахождении локомотива и последнего вагона, целостности рельсов на каждом контрольном участке;
со станций на локомотивы по радиосвязи передается информация о состоянии путевых участков, находящихся в зоне контроля станционных устройств, положении маршрутных стрелок, времени входа и выхода поездов со станции;
с учетом принимаемой и хранящейся в памяти ЭВМЛ информации ЭВМЛ рассчитывает допустимую и оптимальную скорости движения и посредством блока управления движением поезда регулирует скорость движения;
в памяти ЭВМЛ хранится информация о координатах изолирующих стыков для того, чтобы можно было отличить повреждение рельсовой нити от изолирующего стыка;
полученная на станциях с локомотивов информация полностью характеризует состояние перегонных путевых участков, а именно их свободность/занятость, целостность/неисправность рельсовых нитей.
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ СИСТЕМОЙ АВТОБЛОКИРОВКИ С ЦЕНТРАЛИЗОВАННЫМ РАЗМЕЩЕНИЕМ АППАРАТУРЫ | 2017 |
|
RU2662313C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ И МАНЕВРОВЫХ СОСТАВОВ С ПОМОЩЬЮ ЭВМ БЕЗ ОПАСНЫХ ОТКАЗОВ | 2017 |
|
RU2673315C1 |
| СПОСОБ ОРГАНИЗАЦИИ ВИЗУАЛЬНОЙ СПРАВОЧНО-ИНФОРМАЦИОННОЙ ПОДДЕРЖКИ МАШИНИСТА ПОЕЗДА | 2010 |
|
RU2494905C2 |
| Система обмена информацией между локомотивом и диспетчерским пунктом | 1989 |
|
SU1787853A1 |
| СИСТЕМА ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ ПРИ ДИСПЕТЧЕРСКОЙ ЦЕНТРАЛИЗАЦИИ | 2009 |
|
RU2392156C1 |

