[0001] Заявляемое изобретение относится к области удовлетворения жизненных потребностей человека, а именно к способам оценки эффективности его разгрузки при переносе и удержании грузов с помощью пассивного экзоскелета и может быть использовано при проектировании и настройке под антропометрические параметры пользователей пассивных экзоскелетов, используемых в туризме, спорте, в промышленности и торговле, а также при проведении спасательных и армейских операций.
[0002] Заявляемый способ, прежде всего, предназначен для оценки части нагрузки, снимаемой с мышц и скелета человека при переноске тяжестей с помощью пассивного экзоскелета. Экзоскелет, принимая на себя вертикальную составляющую веса груза, разгружает позвоночник, суставы и ноги человека при ходьбе, что позволяет оценить потенциальный эффект его применения с точки зрения снижения физической нагрузки на пользователя. Поэтому предлагаемый способ также может использоваться и в медицинской технике, в частности при подборе экзоскелетов пациентам в травматологии и ортопедии.
[0003] Известно большое количество технических решений экзоскелетов, реализующих идею разгрузки и состоящих из каркаса с элементами крепления к туловищу, шарнирно соединенных между собой двух пар рычагов, которые выполняют функции бедра и голеностопа, а также с каркасом и опорой стопы (например, RU 2110243, 1998, RU 2413805, 2013). Указанные устройства приводятся в движение под действием мышц, поэтому относятся к пассивным конструкциям.
[0004] Однако, анализ доступных патентных источников не позволил заявителю обнаружить технические решения, позволяющие обеспечить численную оценку эффективности разгрузки пользователя при переноске грузов с помощью пассивного экзоскелета.
[0005] Техническим результатом, на достижение которого направлено предлагаемое изобретение, является расширение арсенала технических средств оценки за счет обеспечение возможности оценки эффективности разгрузки пользователя при использовании пассивного экзоскелета.
[0010] Указанный технический результат достигается за счет того, что согласно заявленному способу оценки эффективности разгрузки пользователя при работе с помощью пассивного экзоскелета для, по крайней мере, одной ноги измеряют текущую силу вертикальной реакции на стопе данной ноги пользователя с грузом без экзоскелета и текущую силу вертикальной реакции на стопе данной ноги пользователя в экзоскелете с грузом при заранее заданном параметре измерений.
[0011] Эффективность разгрузки для выбранной ноги вычисляют как отношение разности средней по отношению к указанному заданному параметру измерений силы вертикальной реакции на стопе пользователя с грузом без экзоскелета и средней по отношению к указанному заданному параметру измерений силы вертикальной реакции на стопе пользователя с грузом в экзоскелете к весу груза.
[0012] В предпочтительном варианте реализации способа измеряют текущую силу вертикальной реакции на стопе пользователя для обеих ног, а эффективность разгрузки вычисляют для каждой ноги отдельно.
[0013] Еще в одном предпочтительном варианте реализации общую эффективность разгрузки определяют как половину сумму эффективностей разгрузки для левой и правой ног (каждой ноги) или, другими словами, как среднее арифметическое эффективностей разгрузки обеих ног.
[0014] В конкретном случае реализации способа качестве заранее заданного параметра измерений принимают время продолжительности измерений.
[0015] В другом конкретном случае реализации способа в качестве заранее заданного параметра измерений принимают количество локомоторных циклов, необходимое совершить в процессе измерений.
[0016] Еще в одном конкретном случае реализации способа в качестве заранее заданного параметра измерений принимают длину пути, необходимую пройти в процессе измерений.
[0017] Также возможен случай реализации способа, при котором в качестве заранее заданного параметра измерений принимают отдельные фазы локомоторного цикла: фазу переднего толчка (фазу постановки ноги), фазу разгрузки, фазу заднего толчка.
[0018] В предпочтительном варианте реализации способа силу вертикальной реакции на стопах пользователя определяют с помощью датчиков, размещенных между стопами пациента и обувью.
[0019] В частном случае реализации способа датчики размещают, по крайней мере, в пяточной и плюснефаланговой части стопы.
[0020] В частном случае реализации способа в качестве датчиков применяют измерительные стельки.
[0021] В частном случае реализации способа измерения проводят при движении по горизонтальной или наклонной поверхности, или при движении по лестнице вверх или вниз.
[0022] В частном случае реализации способа измерения проводят при положении пользователя стоящим вертикально.
[0023] Вышеизложенное представляет собой краткое изложение сущности изобретения и, таким образом, может содержать упрощения, обобщения, включения и/или исключения подробностей; следовательно, специалистам в данной области техники следует принять во внимание, что данное краткое изложение сущности изобретения является только иллюстративным и не подразумевает какое-либо ограничение.
[0024] Для лучшего понимания сути предлагаемого решения ниже приводится описание конкретного примера выполнения, не являющееся ограничительным примером практической реализации способа оценки эффективности разгрузки, в соответствии с заявляемым изобретением, со ссылками на рисунки, на которых представлено следующее.
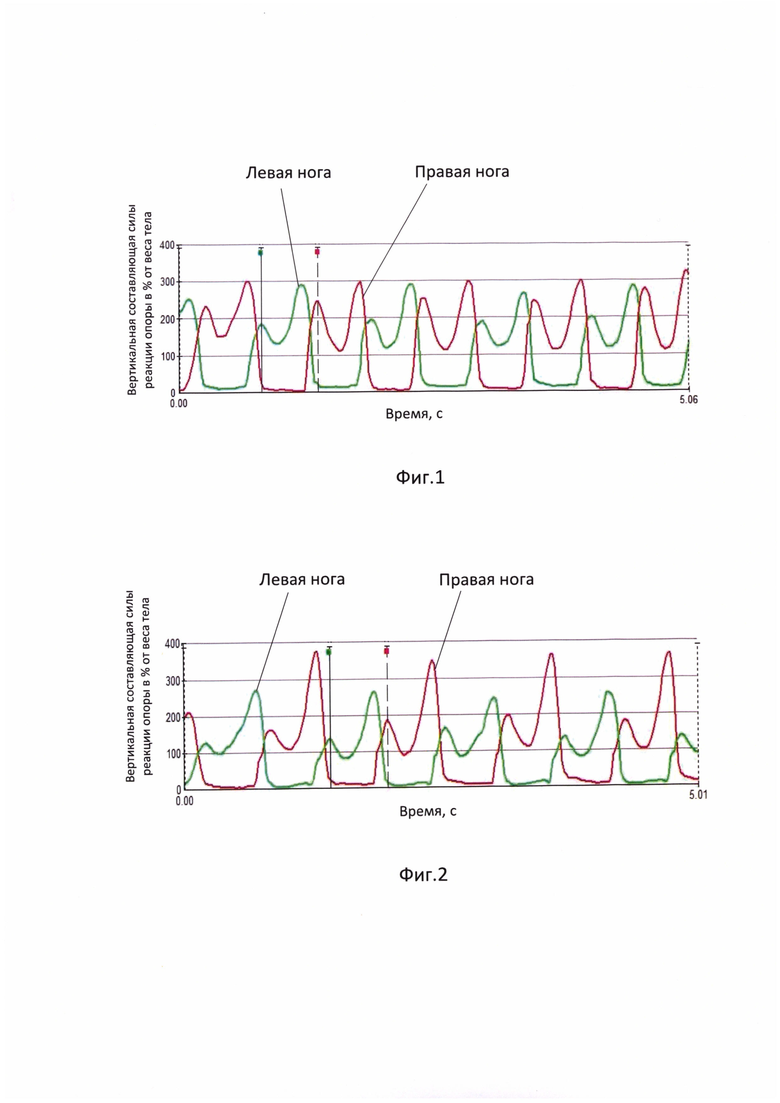
[0025] На фиг. 1 изображены динамические характеристики при работе пользователя с нагрузкой без использования пассивного экзоскелета.
[0026] На фиг. 2 изображены динамические характеристики при работе пользователя с нагрузкой с использованием пассивного экзоскелета.
[0027] Как было отмечено ранее, основное назначение применяемых в настоящее время пассивных экзоскелетов заключается в снижении нагрузки, воспринимаемой мышцами и скелетом человека при переноске тяжестей. При работе с использованием пассивного экзоскелета последний принимает на себя вертикальную составляющую веса груза и, тем самым, разгружает позвоночник, суставы и мышцы ног человека.
[0028] Поэтому при эксплуатации произведенных, а также разработке новых экзоскелетов крайне желательно иметь количественные характеристики, позволяющие оценить эффект его применения с точки зрения снижения физической нагрузки на пользователя. Это позволит, например, установить максимальный вес нагрузки, допустимый при эксплуатации экзоскелета, а также оценить эффективность тех или иных конструктивных решений при проектировании.
[0029] Согласно заявляемому способу оценка эффективности разгрузки пользователя при работе с помощью пассивного экзоскелета основана на измерении вертикальной составляющей RZ опорной реакции на ногах пользователя. Последняя может быть измерена с помощью датчиков силы, расположенных между стопой оператора и опорной площадкой экзоскелета. Лучшим вариантом представляется расположение датчиков между стопой оператора и обувью, интегрированной в экзоскелет.
[0030] Для получения более полной и достоверной картины нагрузки на пользователя датчики силы должны располагаться, по крайней мере, в пяточной и плюснефаланговой частях стопы. На сегодняшний день наиболее отработанным методом получения такой картины является использование в качестве датчиков измерительных стелек, например, гибких датчиков силы фирмы Tekscan или стелек фирмы BeBopSensors.
[0031] Преимуществом применения стелек по сравнению с традиционной динамометрией является возможность регистрировать вертикальную составляющую RZ опорной реакции в каждом шаге, что позволяет получить данные по множеству шагов. Исследование большого количества опорных реакций позволяет провести детальную обработку с получением достоверных результатов.
[0032] Измерительная система силового взаимодействия позволяет получать динамические данные в реальном времени в виде цветного рисунка (фиг. 1, 2), который характеризует уровень силовой нагрузки на различных фазах локомоторного цикла. Измерения выполняются с высокой частотой опроса датчиков (до 6000 Гц). Сенсорная система допускает калибровку в различных режимах (в положении покоя и при ходьбе). Она позволяет также отображать результаты измерений на графиках или в виде полученных массивов числовых данных.
[0033] Согласно заявляемому способу при помощи измерительных стелек определяют текущую силу вертикальной реакции RZ(x) на стопе пользователя в зависимости от заданного параметра X измерений. В качестве параметра измерений может быть выбрано время. Например, необходимо стоять или двигаться по лестнице (вверх/вниз) с грузом без экзоскелета и в экзоскелете в течение 1 минуты.
[0034] Также, в качестве параметра измерений может быть выбрано количество локомоторных циклов или путь, которые необходимо совершить в процессе измерений. Например, необходимо сделать каждой ногой 20 шагов или пройти 20 метров с грузом без экзоскелета и в экзоскелете.
[0035] Далее определяют среднюю силу вертикальной реакции Rz cp на стопе пользователя с грузом без экзоскелета и среднюю силу вертикальной реакции  на стопе пользователя с грузом в экзоскелете.
на стопе пользователя с грузом в экзоскелете.
[0036] На фиг. 1 изображены динамические характеристики при работе пользователя с нагрузкой без использования пассивного экзоскелета, а на фиг. 2 динамические характеристики при работе пользователя с нагрузкой с использованием пассивного экзоскелета. Можно заметить, что несмотря на отдельные пики, средняя силы вертикальной реакции на стопе пользователя при использовании экзоскелета меньше средней силы вертикальной реакции на стопе пользователя без использования экзоскелета.
[0037] Поскольку измерительная система со стельками осуществляет дискретные измерения с заданной частотой опроса средние силы вертикальной реакции Rz cp и  в данном случае могут быть вычислены соответственно как
в данном случае могут быть вычислены соответственно как
[0038]  и
и
[0039]  , где n общее количество выборок измерений.
, где n общее количество выборок измерений.
[0040] В зависимости от целей оценки может определяться суммарная (общая) эффективность разгрузки пользователя при использовании пассивного экзоскелета или эффективность разгрузки отдельно для каждой ноги. Эффективность разгрузки в общем случае определяется как отношение разности средней силы вертикальной реакции на стопе пользователя с грузом без экзоскелета по отношению к заданному параметру измерений и средней силы вертикальной реакции на стопе пользователя с грузом в экзоскелете по отношению к заданному параметру измерений к весу груза.
[0041] Таким образом, суммарная эффективность разгрузки может быть выражена как
[0042]  , где
, где
[0043] EL - эффективность разгрузки левой ноги пользователя, определяемая как
[0044] 
[0045] ER - эффективность разгрузки правой ноги пользователя, определяемая как
[0046] 
[0047] a F - вес груза.
[0048] Хотя в данном документе были описаны различные стороны осуществления заявленного изобретения, специалистам в данной области техники понятно, что возможны другие подходы к осуществлению представленного изобретения. Различные стороны и реализация данного изобретения изложены в настоящем описании в иллюстративных целях и не подразумевают ограничения, причем объем защиты настоящего изобретения указан в нижеследующей формуле изобретения.
Изобретение относится к медицине, а именно к способу оценки эффективности разгрузки пользователя при переносе и удержании грузов с помощью экзоскелета. Согласно способу, по крайней мере для одной ноги измеряют текущую силу вертикальной реакции на стопе выбранной ноги пользователя с грузом без экзоскелета и текущую силу вертикальной реакции на стопе выбранной ноги пользователя в экзоскелете с грузом при заранее заданном параметре измерений. Эффективность разгрузки для данной ноги вычисляют как отношение разности средней силы вертикальной реакции на стопе пользователя с грузом без экзоскелета по отношению к указанному заданному параметру измерений и средней силы вертикальной реакции на стопе пользователя с грузом в экзоскелете по отношению к указанному заданному параметру измерений к весу груза. Изобретение обеспечивает возможность оценки эффективности разгрузки пользователя при использовании пассивного экзоскелета. 11 з.п. ф-лы, 2 ил.
1. Способ оценки эффективности разгрузки пользователя при переносе и удержании грузов с помощью экзоскелета, согласно которому,
по крайней мере, для одной ноги измеряют текущую силу вертикальной реакции на стопе выбранной ноги пользователя с грузом без экзоскелета и текущую силу вертикальной реакции на стопе выбранной ноги пользователя в экзоскелете с грузом при заранее заданном параметре измерений,
эффективность разгрузки для данной ноги вычисляют как отношение разности
средней силы вертикальной реакции на стопе пользователя с грузом без экзоскелета по отношению к указанному заданному параметру измерений и
средней силы вертикальной реакции на стопе пользователя с грузом в экзоскелете по отношению к указанному заданному параметру измерений к весу груза.
2. Способ по п. 1, отличающийся тем, что измеряют текущую силу вертикальной реакции на стопе пользователя для обеих ног, а эффективность разгрузки вычисляют для каждой ноги отдельно.
3. Способ по п. 2, отличающийся тем, что общую эффективность разгрузки определяют как половину суммы эффективностей разгрузки для левой и правой ног.
4. Способ по любому из пп. 1-3, отличающийся тем, что в качестве заранее заданного параметра измерений принимают время продолжительности измерений.
5. Способ по любому из пп. 1-3, отличающийся тем, что в качестве заранее заданного параметра измерений принимают количество локомоторных циклов, необходимое совершить в процессе измерений.
6. Способ по любому из пп. 1-3, отличающийся тем, что в качестве заранее заданного параметра измерений принимают длину пути, необходимую пройти в процессе измерений.
7. Способ по любому из пп. 1-3, отличающийся тем, что в качестве заранее заданного параметра измерений принимают отдельные фазы локомоторного цикла: фазу переднего толчка, фазу разгрузки, фазу заднего толчка.
8. Способ по любому из пп. 1-3, отличающийся тем, что силу вертикальной реакции на стопах пользователя определяют с помощью датчиков, размещенных между стопами пациента и обувью.
9. Способ по п. 8, отличающийся тем, что датчики размещают, по крайней мере, в пяточной и плюснефаланговой части стопы.
10. Способ по п. 8, отличающийся тем, что в качестве датчиков применяют измерительные стельки.
11. Способ по любому из пп. 1-3, отличающийся тем, что измерения проводят при движении по горизонтальной или наклонной поверхности, или при движении по лестнице вверх или вниз.
12. Способ по п. 4, отличающийся тем, что измерения проводят при положении пользователя стоящим вертикально.
| СПОСОБ ОПРЕДЕЛЕНИЯ ЭФФЕКТИВНОСТИ БИОМЕХАНИЧЕСКИХ АНТРОПОМОРФНЫХ СРЕДСТВ (ПАССИВНЫХ ЭКЗОСКЕЛЕТОВ) | 2017 |
|
RU2660312C1 |
| US 8900167 B2, 02.12.2014 | |||
| US 9682005 B2, 20.06.2017 | |||
| US 20190029914 A1, 31.01.2019 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЕСА ЧЕЛОВЕКА И СТЕЛЬКА, ПРЕДНАЗНАЧЕННАЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2531697C1 |

