Изобретение относится к области средств и методов опытных, испытательных и экспериментальных исследований по определению параметров эффективности биомеханических антропоморфных средств перераспределения массы носимого груза (пассивных экзоскелетов).
Современные тенденции развития бионических средств по увеличению мышечной силы человека или сокращению энергозатрат при выполнении задач, требующих больших мышечных напряжений, воплотили в жизнь множество технических решений, именуемых экзоскелетами, примерами которых являются № JP 2011143243, № US 2013231595, № NZ 20080586912, JP 2013082065. Одним из классов таких устройств являются экзоскелеты, предназначенные для перераспределения массы носимого груза с тела оператора на точку опоры самой конструкции экзоскелета, примером которого является RU 2563209. Данный класс является наиболее востребованным средством в различных отраслях жизнедеятельности, в том числе и в Вооруженных Силах Российской Федерации. При внедрении экзоскелетов указанного класса существует проблема отсутствия способа определения параметров их эффективности по перераспределению массы носимого груза. Наиболее близким прототипом к способу определения параметров эффективности биомеханических антропоморфных средств является изобретение RU 2277373 (Оценка сил и моментов суставов с использованием обратной связи), которое в полной мере определяет методологический и расчетный аппарат анализа движений человека. Данное изобретение основано на обратной связи с фиксирующими параметры движений частей тела человека приборами и последующей обработке полученных сигналов согласно предложенным расчетным алгоритмам. Основным недостатком данного изобретения является отсутствие средств измерения воздействия носимого груза на стопы человека и расчетного математического аппарата, определяющего эффективность перераспределения груза.
Способ определения параметров эффективности биомеханических антропоморфных средств состоит в том, что путем регистрации сигналов с тензодатчиков, расположенных на гибких платформах под опорными элементами рычагов экзоскелета и между стопой оператора экзоскелета и верхней частью его опорных элементов, при осуществлении оператором экзоскелета N шагов, определяются исходные данные для расчета параметров эффективности экзоскелета, которыми являются коэффициент перераспределения массы носимого груза на каркас экзоскелета и дифференциальный коэффициент перераспределения массы носимого груза на каркас экзоскелета. Способ включает три этапа. На первом этапе определяются масса оператора Мч, масса экзоскелета Мэкз и устанавливается количество шагов N в последующем испытании, причем N должно быть не менее 100. На втором этапе производится установка устройства регистрации параметров перераспределения массы носимого груза пассивными экзоскелетами на каркас экзоскелета, закрепляется груз установленной массой Мгр и осуществляется движение в экзоскелете на установленное количество шагов N. На третьем этапе производится обработка данных, полученных с устройства регистрации параметров перераспределения массы носимого груза пассивными экзоскелетами, и расчет параметров эффективности экзоскелета. Цифровые данные нагрузки с каждого уровня платформ представляются в виде массивов:
T1 - массив данных нагрузки для первого уровня платформы правой ноги;
Т2 - массив данных нагрузки для первого уровня платформы левой ноги;
Т3 - массив данных нагрузки для второго уровня платформы правой ноги;
Т4 - массив данных нагрузки для второго уровня платформы левой ноги;
Хij - значение нагрузки с j тензодатчика при i шаге для первого уровня платформы, где i принадлежит диапазону от 1 до N/2, j от 1 до 6;
Yij - значение нагрузки с j тензодатчика при i шаге для второго уровня платформы, где i принадлежит диапазону от 1 до N/2, j от 1 до 4.
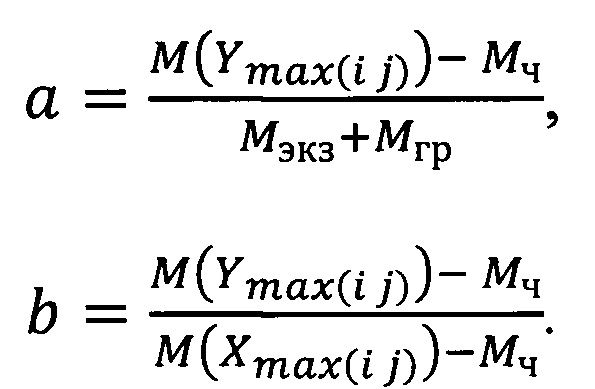
Оцениваемые параметры в виде коэффициента перераспределения массы носимого груза на каркас экзоскелета и дифференциального коэффициента перераспределения массы носимого груза на каркас экзоскелета являются расчетными и вычисляются при помощи электронной вычислительной машины (ЭВМ) на основании полученных массивов данных с тензодатчиков, установленных на двухуровневых съемных платформах. Из массивов данных с помощью встроенных функций в программе Excel Microsoft Office определяются максимальные значения нагрузки Xmax(ij) и Ymax (ij) на каждом шаге и математические ожидания M(Xmax(ij)) и M(Ymax (ij)) для каждого ряда максимальных значений. Далее определяется статистическая доля а и относительная доля b не перераспределенной массы груза и конструкции экзоскелета по формулам:
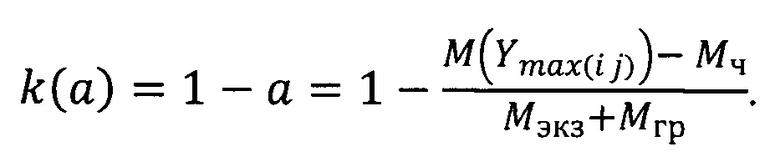
Коэффициент перераспределения массы носимого груза на каркас экзоскелета k(a) характеризует отношение математического ожидания максимальных значений нагрузки с вычетом массы оператора экзоскелета за каждый шаг из полученного массива данных распределенной по стопе нагрузки за N/2 шагов к сумме массы экзоскелета и груза, определяется для каждой ноги по формуле:
Дифференциальный коэффициент перераспределения массы носимого груза на каркас экзоскелета k(b) характеризует отношение математического ожидания максимальных значений нагрузки с вычетом массы оператора экзоскелета за каждый шаг из полученного массива данных распределенной по стопе нагрузки за N/2 шагов к разности математического ожидания максимальных значений нагрузки за каждый шаг из полученного массива данных распределенной нагрузки по опорной части рычага ноги экзоскелета за N/2 шагов и массы оператора экзоскелета, определяется для каждой ноги по формуле:
Эффективность экзоскелета определяется по принадлежности расчетных параметров k(а) и k(b) диапазону значений от 0,8 до 1 и условием Δk=k(a)-k(b)≤0,1. Если коэффициенты k(a) и k(b) принадлежат указанному диапазону и выполняется условие разности, то перераспределение массы носимого груза конструкцией экзоскелета лежит в диапазоне от 80% до 100%, соответственно такая конструкция экзоскелета возможна к применению с осуществлением заложенного в нее назначения.
Технический результат изобретения направлен на снижение числа экспериментальных опытов, с одновременным получением объективных и достоверных данных, характеризующих работу конструкции экзоскелета по перераспределению массы носимого груза с оператора экзоскелета на его опорную часть.
На фиг. 1 изображена схема размещения двухуровневых съемных платформ для осуществления способа определения параметров эффективности биомеханических антропоморфных средств перераспределения массы носимого груза (пассивных экзоскелетов), где первый уровень платформы правой ноги 1 и первый уровень платформы левой ноги 2 прикреплены с помощью двухсторонней клейкой ленты или клея к опорной поверхности опорных элементов рычагов ног экзоскелета, а второй уровень платформы правой ноги 3 и второй уровень платформы левой ноги 4 прикреплен аналогично первым уровням к верхней части опорных элементов рычагов ног экзоскелета. В теле каждого уровня платформы расположены тензодатчики 5, от которых отходят электрические провода 6, соединенные с многоканальным обработчиком сигналов 7, запоминающим устройством 8 и радиопередатчиком 9.
Осуществление способа определения эффективности биомеханических антропоморфных средств (пассивных экзоскелетов) может быть произведено в следующем примере. Испытуемое средство (пассивный экзоскелет) и оператор экзоскелета (испытатель) взвешиваются при помощи напольных весов и определяются параметры Мч - масса оператора и Мэкз - масса экзоскелета. Далее осуществляется подгонка размеров экзоскелета под его оператора. Далее производится установка двухуровневых съемных платформ с помощью двухсторонней клейкой ленты или клея на опорные элементы рычагов экзоскелета левой и правой ноги. Устанавливается число необходимых для проведения испытаний шагов N, например N=100. После этого оператор осуществляет крепление носимой тары с грузом максимальной заданной массы Мгр на экзоскелет и начинает движение, осуществляя 100 шагов. Во время каждого шага электрические импульсы a1-4, b1-4, с 1-4, d1-4 с каждого тензодатчика двухуровневых платформ, согласно схеме на фиг. 1, поступают на многоканальный обработчик сигналов, который модулирует и кодирует поступающие аналоговые электрические импульсы в цифровой код в виде потока данных, поступающих на запоминающие устройство и радиопередатчик. С радиопередатчика данные передаются на приемник и поступают на запоминающие устройство ЭВМ, где подлежат последующей обработке. После осуществления движения с грузом и регистрации данных оператор приступает к обработке полученной информации на ЭВМ и расчету по представленным формулам коэффициента перераспределения массы носимого груза на каркас экзоскелета и дифференциального коэффициента перераспределения массы носимого груза на каркас экзоскелета. Если указанные условия принадлежности значений рассчитанных коэффициентов выполняются, значит, перераспределение массы носимого груза конструкцией экзоскелета лежит в диапазоне от 80% до 100%, соответственно такая конструкция экзоскелета возможна к применению с осуществлением заложенного в нее назначения.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО РЕГИСТРАЦИИ ПАРАМЕТРОВ ПЕРЕРАСПРЕДЕЛЕНИЯ МАССЫ НОСИМОГО ГРУЗА БИОМЕХАНИЧЕСКИХ АНТРОПОМОРФНЫХ СРЕДСТВ (ПАССИВНЫХ ЭКЗОСКЕЛЕТОВ) | 2017 |
|
RU2660510C1 |
| Способ физиологической оценки эффективности применения промышленного экзоскелета | 2022 |
|
RU2801867C1 |
| Способ оценки эффективности разгрузки пользователя при переносе и удержании грузов с помощью экзоскелета | 2019 |
|
RU2723606C1 |
| Тазобедренный шарнирный модуль экзоскелета | 2023 |
|
RU2818620C1 |
| АКТИВНЫЙ МОДУЛЬ СПИНЫ ЭКЗОСКЕЛЕТА | 2023 |
|
RU2825044C1 |
| СИСТЕМА ДИАГНОСТИКИ ОПОРНО-ДВИГАТЕЛЬНОЙ ФУНКЦИИ ЧЕЛОВЕКА | 1996 |
|
RU2116046C1 |
| НОСИМОЕ УСТРОЙСТВО ДЛЯ ПОДДЕРЖКИ РУК ПОЛЬЗОВАТЕЛЯ | 2021 |
|
RU2808690C1 |
| Промышленный экзоскелет для верхних и нижних конечностей | 2021 |
|
RU2793174C1 |
| КОМПЛЕКС ДИНАМИЧЕСКОГО УПРАВЛЕНИЯ АНТРОПОМОРФНЫМ МАНИПУЛЯТОРОМ | 2019 |
|
RU2724775C1 |
| Экзоскелет для дистанционного управления в копирующем режиме антропоморфным роботом | 2021 |
|
RU2832192C2 |

Изобретение относится к области средств и методов опытных, испытательных и экспериментальных исследований по определению параметров эффективности биомеханических антропоморфных средств перераспределения массы носимого груза (пассивных экзоскелетов), технический результат которого направлен на снижение числа экспериментальных опытов, с одновременным получением объективных и достоверных данных, характеризующих работу конструкции экзоскелета по перераспределению массы носимого груза с оператора экзоскелета на его опорную часть. Сущность изобретения состоит в расчете в качестве параметров эффективности коэффициента перераспределения массы носимого груза на каркас экзоскелета и дифференциального коэффициента перераспределения массы носимого груза на каркас экзоскелета. 3 з.п. ф-лы, 1 ил.
1. Способ определения параметров эффективности биомеханических антропоморфных средств (пассивных экзоскелетов) состоит в том, что путем обратной связи с фиксирующими параметры движений частей тела человека приборами и последующей обработки полученных сигналов согласно предложенным расчетным алгоритмам определяют исходные данные для расчета параметров эффективности, отличающийся тем, что регистрацию сигналов производят с тензодатчиков, расположенных на гибких платформах, закрепленных на экзоскелете, при движении оператора на установленное количество шагов, а в качестве параметров эффективности рассчитывают коэффициент перераспределения массы носимого груза на каркас экзоскелета и дифференциальный коэффициент перераспределения массы носимого груза на каркас экзоскелета.
2. Способ определения по п. 1, отличающийся тем, что коэффициент перераспределения массы носимого груза на каркас экзоскелета рассчитывают как отношение математического ожидания максимальных значений нагрузки с вычетом массы оператора экзоскелета за каждый шаг из полученного массива данных распределенной по стопе нагрузки за половину установленного количества шагов к сумме массы экзоскелета и груза и определяют для каждой ноги.
3. Способ определения по п. 1, отличающийся тем, что дифференциальный коэффициент перераспределения массы носимого груза на каркас экзоскелета рассчитывают как отношение математического ожидания максимальных значений нагрузки с вычетом массы оператора экзоскелета за каждый шаг из полученного массива данных распределенной по стопе нагрузки за половину установленного количества шагов к разности математического ожидания максимальных значений нагрузки за каждый шаг из полученного массива данных распределенной нагрузки по опорной части рычага ноги экзоскелета за половину установленного количества шагов и массы оператора экзоскелета и определяется для каждой ноги.
4. Способ определения по п. 1, отличающийся тем, что эффективность перераспределения массы носимого груза экзоскелетом определяют выполнением условия принадлежности значений коэффициента перераспределения массы носимого груза на каркас экзоскелета и дифференциального коэффициента перераспределения массы носимого груза на каркас экзоскелета диапазону от 0,8 до 1 и условием принадлежности значения разности данных коэффициентов диапазону, меньшему или равному 0,1.
| ОЦЕНКА СИЛ И МОМЕНТОВ СУСТАВОВ С ИСПОЛЬЗОВАНИЕМ ОБРАТНОЙ СВЯЗИ | 2002 |
|
RU2277373C2 |
| ПАССИВНЫЙ ГРУЗОВОЙ ЭКЗОСКЕЛЕТОН, КОЛЕННЫЙ ШАРНИР ПАССИВНОГО ГРУЗОВОГО ЭКЗОСКЕЛЕТОНА, КОМПЕНСАТОР ПАССИВНОГО ГРУЗОВОГО ЭКЗОСКЕЛЕТОНА | 2007 |
|
RU2362598C2 |
| ГРУЗОВОЙ ЭКЗОСКЕЛЕТ, СПИННОЙ КАРДАННЫЙ УЗЕЛ И КОЛЬЦЕВОЙ КАРДАН ГРУЗОВОГО ЭКЗОСКЕЛЕТА | 2014 |
|
RU2563209C2 |
| US 2007056592 A1, 15.03.2007 | |||
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ДЕФОРМАЦИИ И БОЛЕВОГО ПОРОГА СЖАТИЯ БОКОВОЙ ПОВЕРХНОСТИ СТОПЫ | 2014 |
|
RU2584115C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЕСА ЧЕЛОВЕКА И СТЕЛЬКА, ПРЕДНАЗНАЧЕННАЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2531697C1 |

