ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Это изобретение относится к приводам (актуаторам) на основе электроактивных материалов (EAM) и способам возбуждения приводов на основе EAM.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
Электроактивные материалы (EAM) являются классом материалов в области электрочувствительных материалов. При реализации в исполнительном устройстве, воздействие электрического сигнала возбуждения на EAM может заставить его измениться по размеру и/или форме. Этот эффект может быть использован в целях обеспечения срабатывания и считывания. Существуют неорганические и органические EAM. Особой разновидностью органических EAM являются электроактивные полимеры (EAP).
Электроактивные полимеры (EAP) являются новым классом материалов в области электрочувствительных материалов. EAP могут работать в качестве датчиков или приводов и легко могут быть изготовлены в различных формах, допускающих легкую интеграцию в целый ряд систем.
Были разработаны материалы с такими характеристиками, как механическое напряжение и деформация срабатывания, которые были значительно улучшены за последние десять лет. Технологические риски были снижены до приемлемых для разработки изделий уровней, так что EAP становятся все более интересными с коммерческой и технической точек зрения. Преимущества EAP включают в себя низкую мощность, небольшой форм-фактор, гибкость, бесшумную работу, точность, возможность высокого разрешения, высокое быстродействие и циклическое срабатывание.
Улучшенная эффективность и конкретные преимущества EAP-материалов обуславливают их пригодность к новым применениям.
EAP-устройство может быть использовано в любом применении, в котором требуется небольшая степень перемещения компонента или элемента на основе электрического срабатывания. Подобным образом эта технология может быть использована для считывания небольших перемещений.
Использование EAP обеспечивает функции, которые были невозможны прежде, или предлагает большое преимущество перед обычными решениями датчиков/приводов вследствие комбинации относительно большой деформации и усилия в небольшом объеме или тонком форм-факторе по сравнению с обычными приводами. EAP также обеспечивают бесшумную работу, точное электронное управление, быстрое срабатывание и большой диапазон возможных частот срабатывания, такой как 0-1 МГц, наиболее часто ниже 20 кГц.
Устройства, использующие электроактивные полимеры, могут быть подразделены на возбуждаемые полем материалы и возбуждаемые ионами материалы.
Примеры возбуждаемых полем EAP включают в себя пьезоэлектрические полимеры, электрострикционные полимеры (такие как релаксорные полимеры на основе PVDF) и диэлектрические эластомеры. Другие примеры включают в себя электрострикционные графт–полимеры, электрострикционную бумагу, электреты, электро-вязкоупругие эластомеры и жидкокристаллические эластомеры.
Примерами возбуждаемых ионами EAP являются сопряженные/проводящие полимеры, ионные полимерно–металлические композиционные материалы (IPMC) и углеродные нанотрубки (CNT). Другие примеры включают в себя ионные полимерные гели.
Это изобретение относится, в частности, к приводам на основе возбуждаемых полем электроактивных материалов.
Возбуждаемые полем EAP приводятся в действие электрическим полем с помощью прямой электромеханической связи. Они обычно требуют сильные поля (вольт на метр), но низкие токи. Полимерные слои обычно являются тонкими, чтобы поддерживать как можно меньшее возбуждающее напряжение.
Ионные EAP приводятся в действие электрически создаваемым перемещением ионов или растворителя. Они обычно требуют низкие напряжения, но высокие токи. Они требуют жидкую/гелевую электролитическую среду (хотя некоторые системы материалов могут также работать с использованием твердых электролитов).
Оба класса EAP имеют множество членов семейства, каждый из которых имеет свои собственные преимущества и недостатки.
Первым значительным подклассом возбуждаемых полем EAP являются пьезоэлектрические и электрострикционные полимеры. В то время как электромеханические характеристики традиционных пьезоэлектрических полимеров являются ограниченными, прорыв в улучшении этих характеристик привел к созданию релаксорных полимеров на основе PVDF, которые демонстрируют спонтанную электрическую поляризацию (возбуждаемое полем выравнивание). Эти материалы могут быть предварительно деформированы для улучшения характеристик в направлении деформации (предварительная деформация приводит к лучшему выравниванию молекул). Обычно используют металлические электроды, поскольку деформации обычно осуществляются в умеренном режиме (1–5%). Также могут быть использованы другие типы электродов (такие как проводящие полимеры, масла, гели или эластомеры на основе углеродной сажи, и т.д.). Электроды могут быть непрерывными или сегментированными.
Другим интересным подклассом возбуждаемых полем EAP является подкласс диэлектрических эластомеров. Тонкая пленка этого материала может быть расположена между деформируемыми электродами, в результате чего образуется плоский конденсатор. В случае диэлектрических эластомеров, максвелловское механическое напряжение, вызываемое приложенным электрическим полем, приводит к механическому напряжению на пленке, вызывая ее сжатие по толщине и расширение по площади. Эффективность деформации обычно увеличивается путем предварительного деформирования эластомера (требуется каркас для поддержания предварительной деформации). Деформации могут быть значительными (10–300%). Это также ограничивает типы электродов, которые могут быть использованы: для небольших и умеренных деформаций могут быть использованы металлические электроды и электроды на основе проводящих полимеров, для режима больших деформаций обычно используют масла, гели или эластомеры на основе углеродной сажи. Электроды могут быть непрерывными или сегментированными.
В некоторых случаях добавляют тонкопленочные электроды, когда сам полимер имеет недостаточную удельную электропроводность (в отношении размера). Электролит может быть жидкостью, гелем или твердым материалом (т.е. комплексом из полимеров с большим молекулярным весом и солей металлов). Наиболее распространенными сопряженными полимерами являются полипиррол (PPy), полианилин (PANi) и политиофен (PTh).
Привод может быть также образован из углеродных нанотрубок (CNT), суспендированных в электролите. Электролит образует двойной слой с нанотрубками, обеспечивая возможность инжекции зарядов. Эта инжекция зарядов двойного слоя считается основным механизмом в CNT-приводах. CNT действует в качестве электродного конденсатора с зарядом, инжектированным в CNT, который затем уравновешивается электрическим двойным слоем, образуемым за счет перемещения электролита к поверхности CNT. Изменение заряда на атомах углерода приводит к изменениям длины связи С–С. В результате можно наблюдать расширение и сжатие единственной CNT.
Фиг. 1 и 2 показывают два возможных режима работы EAP-устройства.
Устройство содержит слой 14 электроактивного полимера, расположенный между электродами 10, 12, находящимися с противоположных сторон слоя 14 электроактивного полимера.
Фиг. 1 показывает устройство, которое не закреплено. Чтобы вызвать показанное расширение слоя электроактивного полимера во всех направлениях, используют напряжение.
Фиг. 2 показывает устройство, которое сконструировано таким образом, что расширение возникает только в одном направлении. Это устройство поддерживается слоем 16 носителя. Чтобы вызвать изгиб или выгиб слоя электроактивного полимера, используют напряжение.
Можно считать, что электроды, слой электроактивного полимера и носитель вместе образуют общую структуру на основе электроактивного полимера.
Природа этого перемещения возникает, например, из взаимодействия между активным слоем, который расширяется при срабатывании, и пассивным несущим слоем. Для получения показанного асимметричного изгиба вокруг некоторой оси, может быть применена, например, ориентация молекул (растяжение пленки), усиливающая перемещение в одном направлении.
Расширение в одном направлении может быть результатом асимметрии EAP–полимера или оно может быть результатом асимметрии свойств слоя носителя, или оно может быть результатом комбинации обоих факторов.
Вышеописанная структура на основе электроактивного полимера может быть использована как для срабатывания, так и для считывания. Наиболее известные механизмы считывания основаны на измерениях усилия и детектировании деформации. Диэлектрические эластомеры, например, могут быть легко растянуты под действием внешней силы. При подаче низкого напряжения на датчик, деформация может быть измерена в зависимости от напряжения (напряжение зависит от площади).
Другой способ считывания с использованием возбуждаемых полем систем состоит в прямом измерении изменения емкости или в измерении изменений сопротивления электродов в зависимости от деформации.
Датчики на основе пьезоэлектрических и электрострикционных полимеров могут генерировать электрический заряд в ответ на приложенное механическое напряжение (при условии, что степень кристалличности является достаточно высокой для генерирования детектируемого заряда). Сопряженные полимеры могут использовать пьезо–ионный эффект (механическое напряжение приводит к появлению ионов). CNT трубки под действием механического напряжения испытывают изменение заряда на поверхности CNT, которое может быть измерено. Также было показано, что сопротивление CNT изменяется в контакте с газообразными молекулами (например, O2, NO2), что делает CNT полезными в качестве детекторов газов.
При активации EAP-привода возникает некоторая временная задержка, вызванная емкостным поведением. Отклик EAP приблизительно подчиняется нелинейной, экспоненциальной функции, которая по существу очень похожа на кривую зарядки конденсатора.
Для достижения некоторого положения EAP, этот емкостной заряд также должен достигать соответствующего уровня. Такой уровень зарядки достигается по прошествии некоторого кратного постоянной времени τ. Обычно максимальное расширение (или конечное положение) достигается по прошествии интервала времени 5τ. Для применений, в которых необходим быстрый отклик с ограниченным временем задержки или требуется более высокая частота работы, это поведение может быть недостатком и может помешать использованию EAP.
Электроактивные полимеры (EAP) могут быть использованы в нескольких применениях, в которых могут существовать разные требования в отношении точности. Например, при использовании в качестве простого устройства тактильной обратной связи не важно, как реагирует EAP; может быть достаточным, чтобы он хоть как–то реагировал, и, следовательно, подавал сигнал обратной связи. Однако в некоторых применениях может требоваться очень высокая точность, причем EAP должен быть деактивирован или частично деактивирован очень точно. В таких случаях, в идеальном варианте требуется ступенчатая механическая деформация. Это может иметь место, например, когда EAP должен быть использован в качестве переключателя «включено–выключено». В зависимости от входного сигнала, EAP должен изменять свое механическое состояние с первого (активированного) состояния на второе (деактивированное или частично деактивированное) состояние. Альтернативно, существуют применения, в которых требуется срабатывание без вибрации, как, например, в устройствах управления положением, таких как катетеры.
Однако в некоторых EAP наблюдалось очень специфическое поведение. При управлении возбуждающим напряжением прямоугольного сигнала, механическая деформация (деактивация) демонстрирует очень существенные колебательные характеристики, представленные на фиг. 3.
Верхнее изображение показывает напряжение срабатывания в зависимости от времени, а нижнее изображение показывает механический отклик в зависимости от времени. Это может приводить к значительным проблемам в некоторых применениях, таких как применения, в которых должны быть обеспечены очень точные состояния «включено–выключено». Обычно определяют некоторое пороговое значение для различения состояний «включено» и «выключено». Если устройство колеблется вблизи этого порогового значения, то состояние переключения является неопределенным, и сам переключатель будет вибрировать. Для применений в управлении положением проблемой является неопределенное (а в некоторых точках неправильное) направление управления положением. Поэтому было бы большим преимуществом, если бы EAP мог быть деактивирован как можно быстрее, но без каких–либо колебаний во время фазы деактивации.
Статья за авторством Xiang X., Alici G., Mutlu R. и Li W. (2014); «How the type of input function affects the dynamic response of conducting polymer actuators» («Как тип входной функции влияет на динамический отклик привода на основе проводящего полимера»), Smart Materials and Structures, 23, 11 раскрывает способ улучшения способности следовать командам для привода на основе проводящего полимера при минимизации потребления электроэнергии. Было обнаружено, что плавный входной сигнал обеспечивает меньшее потребление электроэнергии, чем резкие входные сигналы, такие как ступенчатый входной сигнал с разрывными производными высшего порядка. Эта работа относится к медленно реагирующим приводам с возбуждением током (ионами), у которых колебания во время фазы активации не возникают. Дополнительно, не присутствуют колебания во время фазы деактивации.
Как упомянуто выше, это изобретение относится, в частности, к приводам на основе возбуждаемых полем электроактивных материалов. Они способны реагировать на высоких частотах, и соответственно было обнаружено, что они страдают от проблем, связанных с колебаниями.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Изобретение определяется формулой изобретения.
Согласно примерам в соответствии с одним аспектом изобретения, обеспечен привод на основе возбуждаемого полем электроактивного материала, содержащий:
структуру на основе электроактивного материала; и
драйвер для подачи напряжения срабатывания для структуры на основе электроактивного материала, причем драйвер выполнен с возможностью:
доводить напряжение срабатывания от первого уровня напряжения до второго уровня напряжения, меньшего чем первый уровень напряжения, с помощью переходной функции, имеющей место в течение времени перехода, причем переходная функция содержит сглаживающую функцию, причем время перехода составляет по меньшей мере 0,5 мс.
Эта компоновка предназначена для низкочастотных приводов на основе возбуждаемых напряжением EAP. Вместо использования одноступенчатой функции для перехода между первым и вторым напряжениями, используют переходную функцию, которая содержит сглаживающую функцию и имеет место в течение периода времени по меньшей мере 0,5 мс. Таким образом, механические колебания привода могут быть предотвращены при поддержании периода деактивации, который является как можно более коротким для конкретной технологии EAP.
В частности, наиболее предпочтительно, чтобы драйвер был выполнен с возможностью доводить напряжение срабатывания от первого уровня напряжения до второго уровня напряжения, меньшего, чем первый уровень напряжения и находящегося между первым уровнем и нулем.
Согласно этому набору предпочтительных вариантов осуществления, изобретение, в частности, имеет отношение к примерам, в которых привод на основе электроактивного материала частично деактивируется с тем, чтобы достичь меньшего уровня срабатывания, путем уменьшения возбуждающего напряжения до уровня между первым уровнем и нулем. Именно в этом случае проблема колебаний является наиболее острой. Следует пояснить, что когда EAP полностью деактивируют, прикладываемое напряжение выключают и, соответственно, EAP будет медленно разряжаться через свое внутреннее параллельное сопротивление и, в конце концов, вернется в свое исходное положение. Однако, когда EAP деактивируют частично с тем, чтобы достичь меньшего уровня срабатывания между первым уровнем и нулем, EAP будет разряжаться через выходное полное сопротивление цепи возбуждения, которое обычно значительно меньше внутреннего параллельного сопротивления самого EAP. С помощью использования для перемещения на второй уровень напряжения переходной функции, которая содержит сглаживающую функцию и имеет место в течение периода времени по меньшей мере 0,5 мс, колебания при таких обстоятельствах могут быть по существу предотвращены.
Конкретный градиент и форма переходной функции могут быть выбраны для нахождения наилучшего компромисса между подавлением колебаний и скоростью отклика.
В одном варианте осуществления сглаживающая функция содержит по меньшей мере одно из: линейно-изменяющейся функции; параболической функции; и экспоненциальной функции.
Для уменьшения и/или устранения колебаний, генерируемых EAP во время фазы деактивации, наклон сглаживающей функции и таким образом переходной функции должен быть как можно более плавным. Простейшим путем реализации этого является линейно-изменяющийся отклик в виде единственной прямой линии, начинающейся от первого уровня напряжения и заканчивающейся на втором уровне напряжения. Соответственно, линейно-изменяющаяся функция имеет место в течение периода времени по меньшей мере 0,5 мс. В этом случае полное время перехода относится к сглаживающей функции.
Время перехода может составлять по меньшей мере 1,0 мс или по меньшей мере 2,0 мс или по меньшей мере 5,0 мс.
Для сглаживающей функции могут также рассматриваться и другие формы, такие как параболическая и экспоненциальная функции. В частности, экспоненциальная форма сигнала является простой для реализации в электронной системе с помощью включения в состав конденсатора. Дополнительно, формы сигнала могут быть объединены для образования сглаживающей функции. Например, в течение первого интервала времени полного времени перехода может быть использован линейно-изменяющаяся функция, за которой может следовать экспоненциальная функция или параболическая функция во втором интервале времени.
В некоторых вариантах осуществления сглаживающая функция аппроксимирована в виде набора дискретных точек.
В дополнительных вариантах осуществления сглаживающая функция дополнительно содержит интерполированные точки данных между дискретными точками.
Сглаживающая функция, выбираемая для управления переходом деактивации EAP, может быть реализована путем постепенной аппроксимации. Например, могут быть использованы ступенчатые функции с любыми интерполированными промежуточными значениями или без них, в которых ступени выбраны для уменьшения любых колебаний до приемлемой величины. Интерполированные значения могут находиться точно в соответствующих точках сглаживающей функции или близко к ним.
В некоторых конструкциях переходная функция дополнительно содержит по меньшей мере одно из: первой ступенчатой функции между первым уровнем напряжения и сглаживающей функцией; и второй ступенчатой функции между сглаживающей функцией и вторым уровнем напряжения.
Таким образом, можно увеличить скорость переходной функции при одновременном предотвращении чрезмерных колебаний.
В одной компоновке привод дополнительно содержит систему обратной связи, выполненную с возможностью детектировать колебания структуры на основе электроактивного материала.
В дополнительной компоновке система обратной связи содержит по меньшей мере одно из: механического датчика; и электрического датчика.
Еще в одной дополнительной компоновке драйвер выполнен с возможностью изменять возбуждающее напряжение, если колебания, детектируемые системой обратной связи, больше порогового значения.
Механические датчики, используемые для детектирования колебаний привода, могут включать в себя: фольгу на основе PVDF; датчик деформации; оптический датчик расстояния/отклонения; или любой другой внешний датчик, способный детектировать механические колебания привода.
Электрические датчики могут быть выполнены с возможностью детектировать колебательные изменения в сигнале/токе возбуждения привода для идентификации механических колебаний. Простой реализацией этого может быть последовательное соединение с приводом небольшого резистора.
Поскольку датчики могут детектировать только существующие колебания, обеспечивают пороговое значение для «допустимого» уровня колебаний. При превышении порога сигнал возбуждения адаптируется соответствующим образом.
В некоторых вариантах осуществления переходная функция дополнительно содержит противоколебательную функцию, имеющую ту же частоту, что и колебания структуры на основе электроактивного материала.
Механические колебания данного EAP-привода зависят от его конструкции, например, его типа, размера и формы, его режима нагружения и требований к деактивации. Таким образом, для приводов с известными колебаниями может быть сгенерирован конкретный переходной сигнал, такой как исходная ступенчатая функция, за которой следует противоколебательная функция со смещением постоянным током. Для ослабляющей интерференции с колебаниями привода, частота противоколебательной функции должна совпадать с частотой колебаний привода.
В дополнительных вариантах осуществления противоколебательная функция имеет фазовый сдвиг между 170° и 190° относительно колебаний структуры на основе электроактивного материала.
Фазовый сдвиг такой величины позволяет противоколебательной функции обеспечить полную ослабляющую интерференцию с колебаниями привода.
В одном варианте осуществления драйвер содержит память, выполненную с возможностью запоминать таблицы поиска заданных значений для возбуждения напряжения срабатывания.
Таким образом, драйвер может иметь быстрый и надежный доступ к переходной и сглаживающей функциям для уменьшения и/или устранения колебаний вследствие планируемой деактивации EAP-привода.
В одной компоновке привод дополнительно содержит микроконтроллер.
Согласно примерам в соответствии с одним аспектом настоящего изобретения, обеспечен способ возбуждения привода на основе возбуждаемого полем электроактивного материала, содержащий этапы, на которых:
подают на структуру на основе электроактивного материала напряжение срабатывания; и
доводят напряжение срабатывания от первого уровня напряжения до второго уровня напряжения, меньшего чем первое напряжение, с помощью переходной функции, имеющей место в течение времени перехода, причем переходная функция содержит сглаживающую функцию, причем время перехода составляет по меньшей мере 0,5 мс.
Предпочтительно второй уровень напряжения находится между первым уровнем и нулем.
В одном варианте осуществления способ дополнительно содержит этап, на котором аппроксимируют сглаживающие функции в виде набора дискретных точек.
В дополнительном варианте осуществления способ дополнительно содержит этап, на котором интерполируют точки данных между дискретными точками.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Примеры изобретения теперь будут подробно описаны со ссылкой на сопутствующие чертежи, на которых:
Фиг. 1 показывает известный EAP-привод, который не ограничен и таким образом расширяется в плоскости;
Фиг. 2 показывает известный EAP-привод, который ограничен и таким образом деформируется за пределы плоскости;
Фиг. 3 показывает форму сигнала общепринятой схемы возбуждения и отклик привода на форму сигнала возбуждения;
Фиг. 4 показывает различные формы сигнала схем возбуждения согласно некоторым вариантам осуществления и соответствующие механические отклики привода;
Фиг. 5 показывает более подробный вид механических откликов привода на фиг. 4;
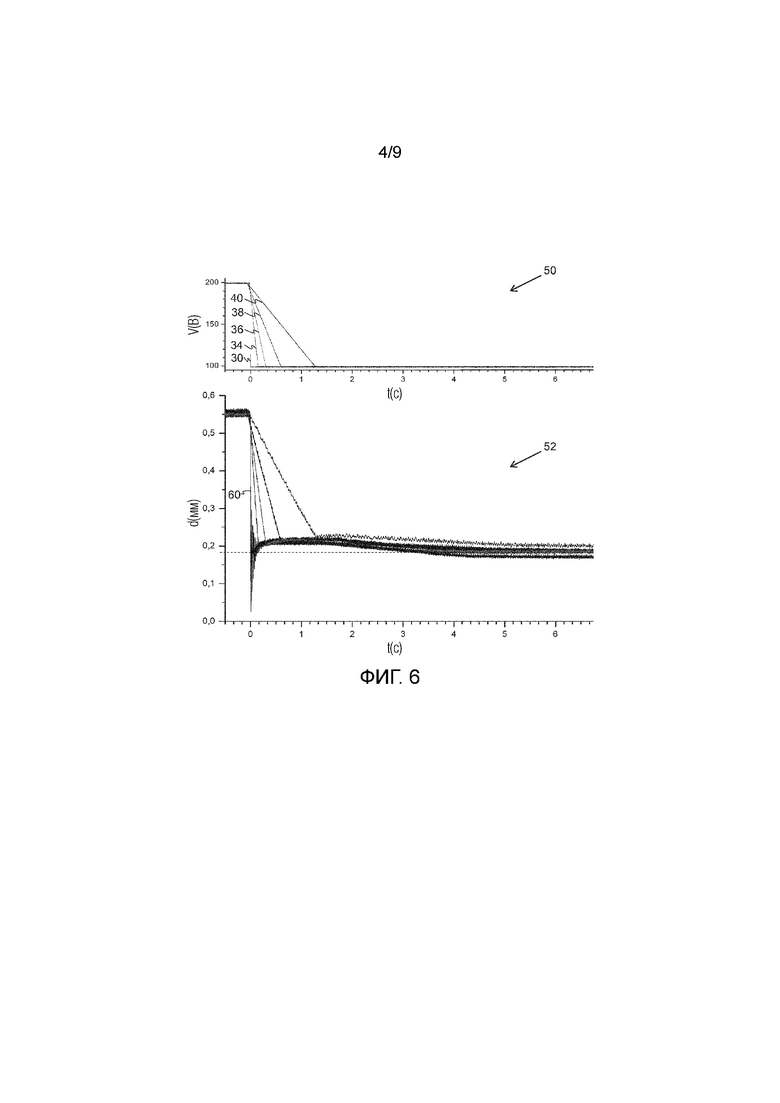
Фиг. 6 показывает формы сигналов по фиг. 4 и соответствующие механические отклики привода, который ранее подвергался систематическому применению;
Фиг. 7 показывает более подробный вид механического отклика привода на фиг. 6;
Фиг. 8 показывает форму сигнала схемы возбуждения согласно одному варианту осуществления;
Фиг. 9 показывает, как форма сигнала может изменяться ступенчато или аппроксимироваться вместо сглаживания;
Фиг. 10 показывает форму сигнала схемы возбуждения, который включает в себя противоколебательную функцию;
Фиг. 11 и 12 показывают способ определения частоты колебаний привода;
Фиг. 13 показывает примерный драйвер для EAP-структуры в комбинации с системой обратной связи для детектирования колебаний EAP-конструкции; и
Фиг. 14 показывает блок–схему способа возбуждения привода на основе возбуждаемого полем EAP.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
Изобретение обеспечивает привод на основе возбуждаемого полем EAP, который возбуждается напряжением срабатывания. Драйвер выполнен с возможностью доводить напряжение срабатывания от первого уровня напряжения до второго уровня напряжения, меньшего чем первый уровень напряжения, с помощью переходной функции, которая имеет место в течение времени перехода. Переходная функция включает в себя сглаживающую функцию. Время перехода составляет по меньшей мере 0,5 мс.
Обычно EAP управляется цепью возбуждения, которая обеспечивает требуемое электрическое напряжение для работы компонента. При активации EAP драйвер обычно генерирует ступенчатое постоянное напряжение с некоторой амплитудой для приведения EAP в требуемое положение. Поскольку электронные цепи возбуждения являются неидеальными (например, они всегда имеют внутренние сопротивления), отклик срабатывания зависит не только от самого EAP, но и от цепи возбуждения. Для уменьшения влияния драйвера, управляющее напряжение для EAP обычно накапливается в конденсаторе, параллельном EAP, и в отношении срабатывания это накопленное напряжение подается электронным переключателем (например, транзистором, MOSFET) на EAP.
EAP-привод затем начинает деформироваться в зависимости от своего заряда, который опять же зависит от амплитуды прикладываемого напряжения. При деактивации EAP прикладываемое напряжение выключают и, соответственно, EAP будет медленно разряжаться через свое внутреннее параллельное сопротивление и, в конце концов, вернется в свое исходное положение. При частичной деактивации EAP с тем, чтобы достичь меньшего уровня срабатывания, напряжение возбуждения уменьшают. В этом случае EAP будет разряжаться через выходное полное сопротивление цепи возбуждения, которое обычно значительно меньше внутреннего параллельного сопротивления самого EAP.
Проблема состоит в том, что ступенчатое уменьшение напряжения может вызывать механические колебания. В частности, заявитель наблюдал во время экспериментальных исследований, что возбуждаемые напряжением (полем) EAP, управляемые напряжением с прямоугольным сигналом, демонстрируют сильные колебания во время фазы деактивации, в то время как синусоидальное управление не приводит к этим колебаниям. Было обнаружено, что колебания во время фазы деактивации вызваны резким изменением управляющего напряжения (срабатывания). Математически это может быть описано как наклон или производная dv/dt напряжения.
Было обнаружено, что если этот наклон превышает некоторый порог, то появляются колебания. Если наклон ограничен путем обеспечения переходной функции, которая подчиняется одной из набора пригодных математических сглаживающих функций, то эти колебания могут быть уменьшены или даже полностью или почти полностью устранены. Дополнительной мерой для помощи в обеспечении неколебательной деактивации EAP является плавный переход между фазой деактивации и конечным установившимся состоянием. Опять же, большая ступень управляющего напряжения может вызывать колебания. Изменение амплитуды напряжения при этом переходе таким образом должно быть также ограничено. Например, в точке перехода между фазой деактивации и положением в конечном установившемся состоянии, наклон или производная dv/dt напряжения могут быть небольшими или нулевыми.
Для определения наиболее пригодных математических сглаживающих функций для переходной функции деактивации были проведены различные измерения с использованием стандартного привода на основе возбуждаемого напряжением EAP.
Таблица 1: Возможные сглаживающие функции

Примерные сглаживающие функции, приведенные в таблице 1, ограничены временем, в течение которого EAP вынуждается изменить состояние срабатывания с исходного состояния срабатывания до меньшего состояния срабатывания. Математически соответствующее время t ограничено неравенством: t0<t≤t1, где t0 является точкой во времени, где деактивация начинается, а t1 является точкой во времени, где деактивация должна закончиться. Обычно эта точка является точкой во времени, где EAP должен достичь своего нового уровня срабатывания. Дополнительно, v0 является фактическим напряжением в точке t0, а v1 является требуемым напряжением в точке t1.
Верхний график 20 по фиг. 4 показывает шесть переходных функций, изображенных в виде напряжения, V, в зависимости от времени, t, причем каждая функция содержит линейно-изменяющуюся сглаживающую функцию с различным градиентом. Переход происходит от первого уровня напряжения 200 В до второго уровня напряжения 100 В. Соответствующие колебательные отклики EAP изображены в виде отклонения, d, в зависимости от времени на нижнем графике 22. Переходная функция 24 является функцией, которая покрывает полный переход между первым уровнем напряжения и вторым уровнем напряжения. В некоторых случаях сглаживающая функция может занимать всю протяженность переходной функции, показанной на фиг. 4; в то время как в других случаях сглаживающая функция может занимать только часть переходной функции, как дополнительно показано ниже.
Самая левая переходная функция 30 по верхнему графику 20 показывает ранее описанную ступенчатую функцию, используемую обычно в общепринятых системах EAP-приводов. В этом случае теоретический градиент переходной функции является бесконечно отрицательным, что означает, что время перехода теоретически является бесконечно малым, тем самым приводя к большим колебаниям, показанным в соответствующем самом левом сигнале 31 нижнего графика 22. Таблица, приведенная ниже, показывает приблизительные градиенты, используемые в каждом переходе, и соответствующую кривую на нижнем графике 22.
Таблица 2: Исследованные наклоны
Как можно легко увидеть из нижнего графика 22, уменьшение абсолютного значения градиента перехода и таким образом увеличение времени перехода приводит к значительному уменьшению амплитуды и числа колебаний, наблюдаемых в EAP.
Как показано в вышеприведенной таблице, абсолютный градиент может быть, например, меньше 2 кВ/с, например, меньше 20 кВ/с, например, меньше 200 кВ/с. С помощью обеспечения перехода, более плавного, чем истинная ступенчатая функция, колебания могут быть уменьшены или предотвращены. Переход от 200 В до нуля, например, может иметь место в течение 1 мс или большего интервала времени.
Фиг. 5 показывает более подробный вид нижнего графика 22 по фиг. 4. Можно увидеть, что колебания почти полностью устранены для всех исследованных наклонов. Однако можно также увидеть, что переходная функция с наименьшим абсолютным градиентом 41 приводит к задержанному отклику, что означает, что целевая точка срабатывания достигается несколько позже, чем требуется, и это может дополнительно приводить к небольшому сдвигу. Этот сдвиг может быть предотвращен путем возбуждения до немного меньшего напряжения, чем примерно v1=100В.
Такие коррекции могут, например, запоминаться драйвером в таблице поиска. С помощью увеличения абсолютного градиента переходной функции и таким образом уменьшения времени перехода сдвиг и задержка уменьшаются. Для этого конкретного EAP переходная функция 32 с градиентом около –1280 В/с подходит ближе всего к исходному отклику, но с сильно уменьшенными колебаниями 33. Этот градиент приводит к времени перехода приблизительно 0,8 мс. Время перехода может быть уменьшено дополнительно; однако, уменьшение времени перехода ниже 0,5 мс может увеличить риск генерирования колебаний.
Фиг. 6 показывает на графике 52 механический отклик на пять переходных функций по фиг. 4, изображенных на графике 50, на EAP, который подвергался систематическому применению. Упомянутыми пятью функциями являются функции 30, 34, 36, 38 и 40, определенные в вышеприведенной таблице 2. Поведение некоторых EAP может зависеть от их истории, что означает, что управление/возбуждение EAP в прошлом может иметь влияние на текущие характеристики. Дополнительно, на механическую деформацию может оказывать сильное влияние деградация с течением времени. В дополнение к этому, механический отклик (деактивации) может также зависеть от самого требуемого уровня срабатывания. Более конкретно, механический отклик может зависеть от того, является ли целевой уровень срабатывания близким к максимуму, находится в средней области или близок к минимальному уровню срабатывания EAP. Далее приведена последовательность механизмов, приводящих к активации и деактивации EAP-приводов, а именно: пьезоэлектрический эффект; емкостной эффект; дипольный эффект; и микрокристаллическое упорядочивание; и тот факт, что эти механизмы активируются на разных диапазонах напряжений и разных скоростях изменения напряжений. Конкретно, некоторые механизмы, такие как дипольный и пьезоэлектрический механизмы, имеют очень быстрое время отклика, в то время как другие, такие как микрокристаллическое упорядочивание, являются медленными и поэтому очень зависят от истории применения. Эти механизмы также ведут себя по–разному при увеличении, уменьшении или полном снятии напряжения.
В отличие от первого набора измерений, показанного на фиг. 4 и 5, второй набор измерений, показанный на фиг. 6 и 7, представляет характеристики другого EAP, который применяли в течение нескольких часов при различных условиях возбуждения. Самый левый сигнал 60 нижнего графика 52 по фиг. 6 показывает поведение EAP при общепринятой ступенчатой функции 30. При сравнении его с соответствующим сигналом 31 по фиг. 4 и 5, показывающих неиспользованный EAP, можно увидеть явное различие в механическом отклике. В то время как в первом случае требуемый уровень срабатывания достигается медленно через экспоненциальное затухание, конечный уровень срабатывания второго EAP достигается после медленного локального увеличения. В обоих случаях колебания можно наблюдать в ответ на ступенчатую переходную функцию 30.
Фиг. 7 показывает подробный вид нижнего графика 52 по фиг. 6. Как и в случае по фиг. 5, переходная функция с наименьшим абсолютным градиентом 62 приводит к задержанному отклику и небольшому сдвигу от целевой точки срабатывания. Опять же, было обнаружено, что время перехода приблизительно 0,8 мс приводит к требуемому балансу между временем отклика и числом наблюдаемых колебаний.
Как описано выше, сглаживающая функция может иметь некоторое число или комбинацию разных форм, показанных в таблице 1. Для уменьшения или предотвращения колебаний, время перехода, которое может содержать один или более интервалов времени сглаживания, должно составлять по меньшей мере 0,5 мс.
Фиг. 8 показывает один вариант осуществления переходной функции 70, которая включает в себя сглаживающую функцию 72, изображенной в виде нормированного напряжения, Vнорм, в зависимости от шага по времени, ts. Переходная функция дополнительно включает в себя первую ступенчатую функцию 74 между первым уровнем напряжения и сглаживающей функцией и вторую ступенчатую функцию 76 между сглаживающей функцией и вторым уровнем напряжения. Таким образом, переход деактивации может быть ускорен при одновременном уменьшении или предотвращении колебаний.
Фиг. 9 показывает переходную функцию 80, которая включает в себя экспоненциальную сглаживающую функцию 82, показанную пунктирной линией. В случае, когда экспоненциальная функция не может быть точно воспроизведена, сглаживающая функция может быть реализована путем постепенных аппроксимаций, таких как ступенчатые функции с интерполированными значениями, показанные сплошной линией 84, или без интерполированных значений, показанные пунктирной линией 86. Интерполированные значения могут находиться точно в соответствующих точках сглаживающей функции или близко к ним. С помощью выполнения этой аппроксимации сглаживающей функции можно уменьшить вычислительную мощность и/или сложность системы, требуемой для возбуждения напряжения срабатывания EAP.
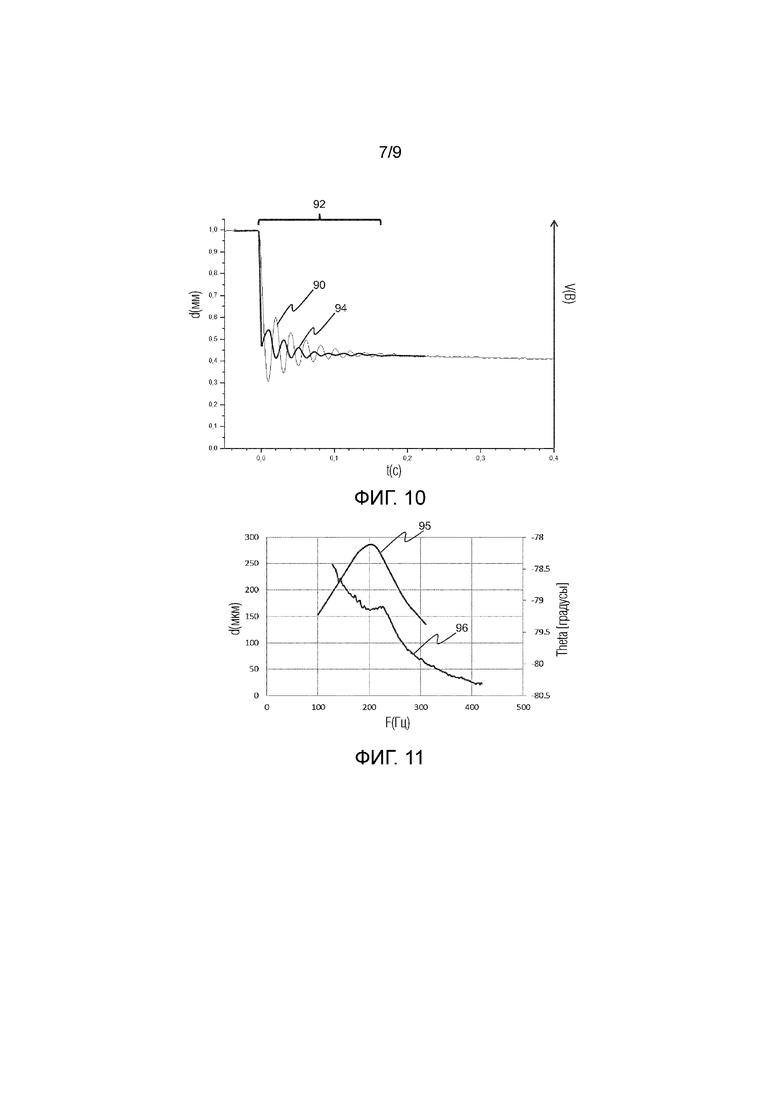
Фиг. 10 показывает механические колебания 90 относительно оси d отклонения привода в ответ на общепринятую ступенчатую переходную функцию. Дополнительно, график показывает примерную переходную функцию 92 относительно оси напряжения, V, которая включает в себя противоколебательную функцию 94.
Как описано выше, наблюдаемые колебания конкретного EAP зависят от его конструкции, режима нагружения и требований к активации (деактивации). Таким образом, для приводов с известными колебаниями может быть сгенерирован конкретный сигнал деактивации. Например, сначала может быть использован ступенчатый отклик, за которым следует противоколебательная функция 94 со смещением постоянным током. Противоколебательная функция должна иметь ту же самую частоту, что и механические колебания, но сдвинутую по фазе на около 180° для обеспечения разрушающей (ослабляющей) интерференции. Более конкретно, для проактивной компенсации механических колебаний, фазовый сдвиг должен быть адаптирован таким образом, чтобы сигнал возбуждения был упреждающим немного меньше чем на 180°.
Поскольку частота колебаний зависит от геометрии, закрепления, истории и возбуждающего напряжения EAP, необходимо точно определить частоту колебаний непосредственно перед возникновением деактивации для достижения максимальной эффективности противоколебательной функции. Электрическое измерение типичной частоты колебаний EAP может быть использовано для определения амплитуды противоколебаний. Это устраняет потребность в обратной связи по амплитуде колебаний EAP, например, путем использования дополнительного датчика.
Частота колебаний EAP может быть определена путем возбуждения слабого сигнала переменного напряжения поверх основного напряжения срабатывания. Этот слабый сигнал переменного напряжения является достаточно небольшим для предотвращения добавления дополнительных механических деформаций к EAP, но все же может быть измерен электронным образом. Обычно слабый сигнал переменного напряжения составляет <1% основного напряжения срабатывания.
Фиг. 11 и 12 показывают в виде кривой 95 отклонение EAP вследствие напряжения срабатывания и полное сопротивление EAP в виде кривой 96, измеренное при слабом возбуждении переменным напряжением в некотором диапазоне частот. Мнимая часть полного сопротивления, указанная по шкале тета, зависит от частоты колебаний, как можно увидеть на фиг. 11. Путем взятия второй производной полного сопротивления, показанной на фиг. 12 в виде кривой 98, положение частоты колебаний может быть легко определено на основании антирезонансной частоты, far, с типичной точностью 10%. В этом случае порог может быть установлен на уровне –1. Фактически антирезонансная частота в затухающих электромеханических системах, таких как EAPS, обычно на 10% больше резонансной частоты. Таким образом, более точная частота возбуждения противоколебательной функции составляет 0,9*far.
Фиг. 13 показывает, что драйвер 100 используется для приложения возбуждающего напряжения к EAP-структуре 102. Эта фигура также показывает необязательную систему 104 обратной связи, которая включает в себя механический, оптический и/или электрический датчики. Система обратной связи может позволить драйверу 100 изменять возбуждающее напряжение EAP для компенсации любых детектируемых колебаний. Может оказаться невозможным предотвратить колебания, когда система обратной связи способна только детектировать существующие колебания. По существу, может оказаться необходимым обеспечивать допустимый порог колебаний, выше которого драйвер будет выполнен с возможностью начинать компенсацию колебаний.
Для генерирования требуемой переходной функции может быть использовано несколько реализаций. Базовые аналоговые цепи могут быть использованы в некоторых случаях, например, с использованием конденсатора для генерирования экспоненциальной сглаживающей функции. Дополнительно, цифровой микроконтроллер может вычислять требуемые аналоговые точки данных для переходной функции, которые могут быть затем усилены любым общепринятым решением усилителя мощности.
Кроме того, может быть реализован подход с таблицами поиска; когда все требуемые точки данных предварительно вычислены и запомнены в памяти, находящейся в драйвере, или другом пригодном управляющем устройстве. Цифровые или аналоговые точки данных могут затем считываться в зависимости от времени.
Фиг. 14 показывает способ 110 по изобретению.
На этапе 112 на EAP-структуру подают напряжение срабатывания.
На этапе 114 сглаживающая функция может быть аппроксимирована в виде набора дискретных точек.
На этапе 116 точки данных могут быть интерполированы между дискретными точками данных для лучшей аппроксимации исходной сглаживающей функции.
На этапе 118 напряжение срабатывания доводят от первого уровня напряжения до второго уровня напряжения, причем первый уровень напряжения больше второго уровня напряжения, с помощью переходной функции, имеющей место в течение времени перехода. Переходная функция по меньшей мере частично содержит сглаживающую функцию, причем время перехода составляет по меньшей мере 0,5 мс.
Это изобретение относится, в частности, к срабатыванию EAP-приводов. Однако оно может быть использовано в применениях, в которых EAP-устройство выполняет как функцию считывания (восприятия), так и функцию срабатывания.
Хотя в вышеприведенном подробном описании конструкция и работа устройств и систем по изобретению были описаны для EAP, изобретение может быть фактически использовано для устройств на основе других видов EAM-материалов. Следовательно, если не указано иное, то вышеупомянутые EAP-материалы могут быть заменены другими EAM-материалами. Такие другие EAM-материалы известны в данной области техники, и специалисты в данной области техники знают, где их найти и как их применять.
Материалы, пригодные для EAP-слоя, известны. Электроактивные полимеры включают в себя, но не ограничены этим, подклассы: пьезоэлектрических полимеров, электромеханических полимеров, релаксорных сегнетоэлектрических полимеров, электрострикционных полимеров, диэлектрических эластомеров, жидкокристаллических эластомеров, сопряженных полимеров, ионных полимерно–металлических композиционных материалов, ионных гелей и полимерных гелей.
Подкласс электрострикционных полимеров включает в себя, но не ограничен этим:
Поливинилиденфторид (PVDF), поливинилиденфторид – трифторэтилен (PVDF–TrFE), поливинилиденфторид – трифторэтилен – хлорфторэтилен (PVDF–TrFE–CFE), поливинилиденфторид – трифторэтилен – хлортрифторэтилен (PVDF–TrFE–CTFE), поливинилиденфторид – гексафторпропилен (PVDF – HFP), полиуретаны или их смеси.
Подкласс диэлектрических эластомеров включает в себя, но не ограничен этим:
акрилаты, полиуретаны, силоксаны.
Подкласс сопряженных полимеров включает в себя, но не ограничен этим:
полипиррол, поли–3,4–этилендиокситиофен, поли(п–фениленсульфид), полианилины.
Во всех этих примерах для оказания влияния на электрическое и/или механическое поведение слоя EAP в ответ на прикладываемое электрическое поле могут быть обеспечены дополнительные пассивные слои.
EAP-cлой каждого блока может быть расположен между электродами. Электроды могут быть растяжимыми, чтобы они следовали за деформацией слоя EAP-материала. Материалы, пригодные для электродов, также известны и могут быть, например, выбраны из группы, состоящей из тонких пленок металла, такого как золото, медь или алюминий, или органических проводников, таких как углеродная сажа, углеродные нанотрубки, графен, полианилин (PANI), поли(3,4–этилендиокситиофен) (PEDOT), например, поли(3,4–этилендиокситиофен)–поли(стиролсульфонат) (PEDOT:PSS). Также могут быть использованы металлизированные полиэфирные пленки, такие как металлизированный полиэтилентерефталат (PET), например, с использованием алюминиевого покрытия.
Если электроды расположены в несимметричной конфигурации, то прикладываемое напряжение может вызывать все виды деформаций, такие как кручение, свертывание, закручивание, изгиб и деформация несимметричного изгиба.
Изобретение может быть использовано во многих применениях EAP и полимеров, в том числе в примерах, где представляет интерес пассивный матричный массив приводов.
Во многих применениях главная функция изделия основывается на (локальном) управлении человеческой тканью, или на приведении в движение интерфейса контакта с тканью. В таких применениях EAP-приводы обеспечивают уникальные преимущества, например, главным образом, вследствие небольшого форм-фактора, гибкости и высокой плотности энергии. Следовательно, EAP и фоточувствительные полимеры могут быть легко интегрированы в мягкие, трехмерные и/или миниатюрные изделия и интерфейсы. Примерами таких применений являются:
устройства косметической обработки кожи, такие как устройства воздействия на кожу в форме кожных пластырей на основе чувствительных полимеров, которые обеспечивают постоянное или циклическое растяжение кожи для натяжения кожи или для уменьшения морщин;
дыхательные устройства с интерфейсной маской пациента, которая имеет активную подкладку или уплотнение на основе чувствительного полимера, для обеспечения переменного нормального давления на кожу, которое уменьшает или предотвращает красные пятна на лице;
электробритвы с адаптивной бреющей головкой. Высота контактирующих с кожей поверхностей может настраиваться с использованием приводов на основе чувствительного полимера, чтобы влиять на баланс между близостью и раздражением;
устройства очистки полости рта (ирригаторы), такие как воздушная нить с динамическим приводом с соплом, для улучшения предела досягаемости при распылении, особенно в промежутках между зубами. Альтернативно, зубные щетки могут быть снабжены активируемыми нитями;
устройства потребительской электроники или сенсорные панели, которые обеспечивают локальную тактильную обратную связь посредством массива преобразователей на основе чувствительного полимера, который встроен в пользовательский интерфейс или находится вблизи него;
катетеры с ориентируемым наконечником для обеспечения возможности легкой навигации в извилистых кровеносных сосудах;
измерения физиологических параметров человеческого тела, таких как сердцебиение, SpO2 и кровяное давление.
Другая категория релевантных применений, которая получает преимущество от таких приводов, относится к модификации света. Оптические элементы, такие как линзы, отражающие поверхности, решетки и т.д., могут быть выполнены адаптивными за счет адаптации формы или положения с использованием этих приводов. Здесь преимуществом EAP является, например, низкое энергопотребление.
Другие варианты раскрытых вариантов осуществления могут быть поняты и осуществлены специалистами в данной области техники при применении на практике заявленного изобретения, из изучения чертежей, раскрытия и прилагаемой формулы изобретения. В формуле изобретения слово «содержащий» не исключает других элементов или этапов, а форма единственного числа не исключает множества. Тот факт, что некоторые меры приведены во взаимно отличающихся зависимых пунктах формулы изобретения, не указывает на то, что не может быть использована с преимуществом комбинация этих мер. Никакие ссылочные позиции в формуле изобретения не следует толковать как ограничивающие ее объем.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИСПОЛНИТЕЛЬНОЕ И СЧИТЫВАЮЩЕЕ УСТРОЙСТВО НА ОСНОВЕ ЭЛЕКТРОАКТИВНОГО ПОЛИМЕРА | 2018 |
|
RU2753750C2 |
| УПРАВЛЕНИЕ ЖЕСТКОСТЬЮ ДЛЯ ЭЛЕКТРОАКТИВНЫХ ИСПОЛНИТЕЛЬНЫХ УСТРОЙСТВ | 2017 |
|
RU2748051C2 |
| ИСПОЛНИТЕЛЬНОЕ УСТРОЙСТВО, ВКЛЮЧАЮЩЕЕ В СЕБЯ ИСПОЛНИТЕЛЬНОЕ УСТРОЙСТВО НА ОСНОВЕ ЭЛЕКТРОАКТИВНОГО ПОЛИМЕРА, И СПОСОБ ВОЗБУЖДЕНИЯ | 2018 |
|
RU2764083C2 |
| УЛЬТРАЗВУКОВОЕ УСТРОЙСТВО И АКУСТИЧЕСКИЙ КОМПОНЕНТ ДЛЯ ИСПОЛЬЗОВАНИЯ В ТАКОМ УСТРОЙСТВЕ | 2017 |
|
RU2756022C2 |
| ИСПОЛНИТЕЛЬНОЕ УСТРОЙСТВО И СПОСОБ ДЛЯ НЕГО | 2017 |
|
RU2750855C2 |
| МЕДИЦИНСКОЕ ЗОНДОВОЕ УСТРОЙСТВО ДЛЯ УЛЬТРАЗВУКОВОЙ ВИЗУАЛИЗАЦИИ | 2016 |
|
RU2723941C2 |
| ИСПОЛНИТЕЛЬНОЕ УСТРОЙСТВО НА ОСНОВЕ ЭЛЕКТРОАКТИВНОГО ПОЛИМЕРА | 2017 |
|
RU2745005C2 |
| УЛЬТРАЗВУКОВОЕ ПРЕОБРАЗУЮЩЕЕ УСТРОЙСТВО И СПОСОБ УПРАВЛЕНИЯ ИМ | 2018 |
|
RU2769757C2 |
| СЕНСОРНОЕ УСТРОЙСТВО И СПОСОБ СЧИТЫВАНИЯ, ОСНОВАННЫЙ НА ЭЛЕКТРОАКТИВНОМ МАТЕРИАЛЕ | 2017 |
|
RU2720128C2 |
| ФОРМИРОВАНИЕ КОНТАКТА УЛЬТРАЗВУКОВОГО УСТРОЙСТВА | 2017 |
|
RU2742967C2 |







Изобретение относится к исполнительным устройствам на основе электроактивных полимеров. Технический результат заключается в уменьшении и/или устранении колебаний, генерируемых EAP во время фазы деактивации. Группа изобретений представляет собой привод на основе возбуждаемого полем электроактивного полимера и способ его возбуждения напряжением срабатывания. Драйвер выполнен с возможностью доводить напряжение срабатывания от первого уровня напряжения до второго уровня напряжения, меньшего, чем первый уровень, с помощью переходной функции, имеющей место в течение времени перехода. Переходная функция включает в себя сглаживающую функцию. Время перехода составляет по меньшей мере 0,5 мс. 2 н. и 13 з.п. ф-лы, 14 ил.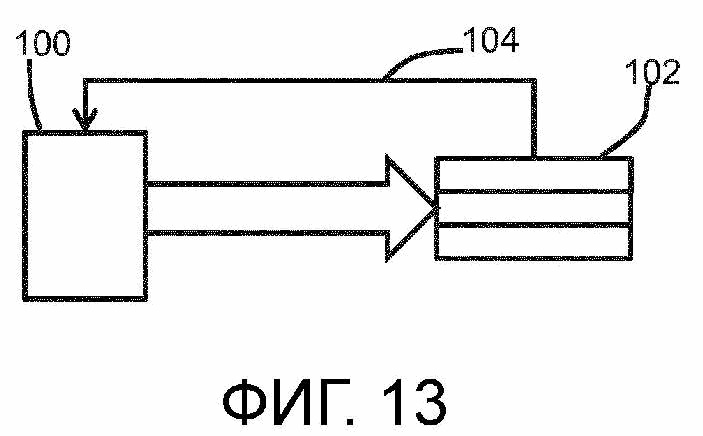
1. Привод на основе возбуждаемого полем электроактивного материала, содержащий:
структуру на основе электроактивного полимера, состоящую из слоя электроактивного полимера, носителя и электродов; и
драйвер (100) для подачи напряжения срабатывания на структуру на основе электроактивного материала, выполненный с возможностью:
доводить напряжение срабатывания от первого уровня напряжения до второго уровня напряжения, меньшего, чем первый уровень напряжения и находящегося между первым уровнем и нулем, с помощью переходной функции (24), имеющей место в течение времени перехода, причем переходная функция содержит сглаживающую функцию (82), причем время перехода составляет по меньшей мере 0,5 мс.
2. Привод по п. 1, в котором сглаживающая функция (72) содержит по меньшей мере одно из: линейно-изменяющейся функции; параболической функции и экспоненциальной функции.
3. Привод по любому предшествующему пункту, в котором сглаживающая функция (82) аппроксимирована в виде набора дискретных точек (86).
4. Привод по п. 3, в котором сглаживающая функция (82) дополнительно содержит интерполированные точки (84) данных между дискретными точками (86).
5. Привод по любому предшествующему пункту, в котором переходная функция (24) дополнительно содержит по меньшей мере одно из: первой ступенчатой функции (74) между первым уровнем напряжения и сглаживающей функцией; и второй ступенчатой функции (76) между сглаживающей функцией и вторым уровнем напряжения.
6. Привод по любому предшествующему пункту, дополнительно содержащий систему (104) обратной связи, выполненную с возможностью детектировать колебания структуры (102) на основе электроактивного полимера.
7. Привод по п. 6, в котором система (104) обратной связи содержит по меньшей мере одно из: механического датчика и электрического датчика.
8. Привод по п. 6 или 7, в котором драйвер (100) выполнен с возможностью изменять возбуждающее напряжение, если колебания, детектируемые системой (104) обратной связи, выше порогового значения.
9. Привод по любому предшествующему пункту, в котором переходная функция дополнительно содержит противоколебательную функцию (94), имеющую ту же частоту, что и колебания структуры на основе электроактивного полимера.
10. Привод по п. 9, в котором противоколебательная функция (94) имеет фазовый сдвиг между 170° и 190° относительно колебаний структуры на основе электроактивного полимера.
11. Привод по любому предшествующему пункту, в котором драйвер (100) содержит память, выполненную с возможностью хранить таблицы поиска заданных значений для возбуждения напряжения срабатывания.
12. Привод по любому предшествующему пункту, дополнительно содержащий микроконтроллер.
13. Способ (110) возбуждения привода на основе возбуждаемого полем электроактивного материала, содержащий этапы, на которых
подают (112) на структуру на основе электроактивного полимера, состоящую из слоя электроактивного полимера, носителя и электродов, напряжение срабатывания; и
доводят (118) напряжение срабатывания от первого уровня напряжения до второго уровня напряжения, меньшего, чем первый уровень напряжения и находящегося между первым уровнем и нулем, с помощью переходной функции, имеющей место в течение времени перехода, причем переходная функция содержит сглаживающую функцию, причем время перехода составляет по меньшей мере 0,5 мс.
14. Способ по п. 13, дополнительно содержащий этап, на котором аппроксимируют (114) сглаживающие функции в виде набора дискретных точек.
15. Способ по п. 14, дополнительно содержащий этап, на котором интерполируют (116) точки данных между дискретными точками.
| US 7049756 B2, 23.05.2006 | |||
| US 20130100575 A1, 25.04.2013 | |||
| GB 8928952 D0, 28.02.1990 | |||
| ПЬЕЗОКЕРАМИЧЕСКАЯ МНОГОСЛОЙНАЯ ДЕТАЛЬ ДЛЯ ИЗМЕРИТЕЛЬНЫХ ПРИБОРОВ И СПОСОБ ЕЕ ИЗГОТОВЛЕНИЯ | 2000 |
|
RU2264678C2 |
| ЭЛЕКТРОАКТИВНЫЙ ПОЛИМЕРНЫЙ АКТЮАТОР | 2011 |
|
RU2568944C2 |

