Изобретение относится к области магнитолевитационных транспортных средств, а именно, к узлам динамической боковой стабилизации магнитолевитационных транспортных средств.
Для оценки новизны заявленного решения рассмотрим ряд известных технических средств аналогичного назначения, характеризуемых совокупностью сходных с заявленным устройством признаков.
Известно магнитолевитационное транспортное средство, в котором устройство боковой стабилизации выполнено в виде горизонтальных боковых колес, см. Высокоскоростной магнитный транспорт с электродинамической левитацией / В.А. Дзензерский, В.И. Омельяненко, С.В. Васильев, В.И. Матин, С.А. Сергеев. Киев.: Наукова Думка. 2001. 480 с.
Данное техническое решение, как наиболее близкое к заявляемому по техническому существу и достигаемому результату, принято в качестве его прототипа.
Недостатком данного устройства является недостаточная эффективность боковой стабилизации магнитолевитационного транспортного средства, усложнение конструкции, магнитолевитационного транспортного средства.
Задачей изобретения является создание конструктивно простого, надежного в эксплуатации и эффективного средства боковой стабилизации магнитолевитационного транспортного средства, обеспечивающего его безопасность при движении.
Сущность заявляемого технического решения выражается в следующей совокупности существенных признаков, достаточной для достижения указанного выше обеспечиваемого изобретением технического результата.
Согласно изобретению магнитолевитационное транспортное средство, включающее устройство боковой стабилизации, характеризуется тем, что устройство боковой стабилизации выполнено в виде гетерополярных магнитных полюсов, составленных из сборок элементарных магнитов, и трековых модулей активной путевой структуры, гетерополярные магнитные полюса размещены симметрично друг другу и оси движения магнитолевитационного транспортного средства в разных плоскостях, которые расположены под углом друг к другу и под углом 5-30 градусов к плоскости движения магнитолевитационного транспортного средства, при этом трековые модули активной путевой структуры также размещены симметрично друг другу и оси движения магнитолевитационного транспортного средства в разных плоскостях, которые расположены под углом друг к другу и под углом 5-30 градусов к плоскости движения магнитолевитационного транспортного средства, при этом трековые модули активной путевой структуры размещены параллельно соответствующим гетерополярным магнитным полюсам.
Технический результат, достигаемый при реализации заявленной совокупности существенных признаков, заключается в том, что при любом боковом смещении магнитолевитационного транспортного средства от оси его движения происходит изменение динамического равновесия системы вследствие изменения воздушного зазора между трековым модулем и магнитным полюсом, что приводит к возникновению усилия стабилизации, возвращающего систему в состояние динамического равновесия.
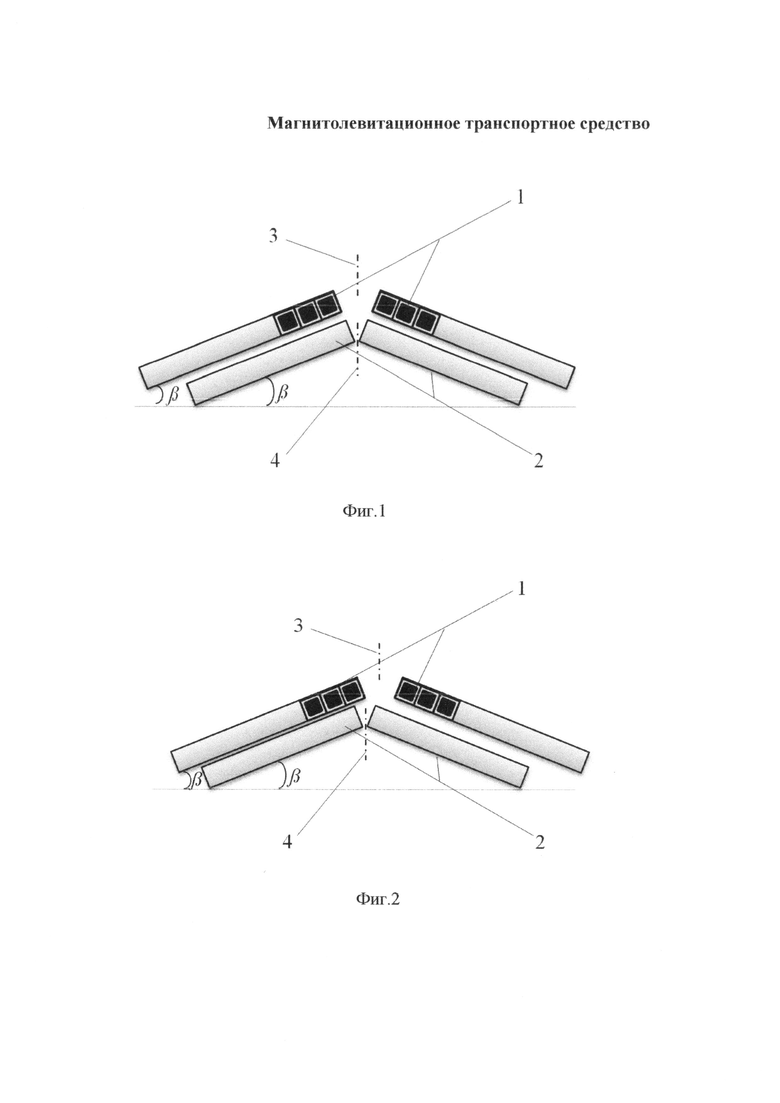
Сущность заявляемого технического решения поясняется чертежом, где на фиг. 1 представлена схема расположения двух гетерополярных магнитных полюсов относительно двух трековых модулей активной путевой структуры магнитолевитационного транспортного средства в состоянии динамического равновесия, на фиг. 2 - то же при боковом смещении вправо магнитолевитационного транспортного средства.
Магнитолевитационное транспортное средство содержите узел боковой стабилизации, включающий гетерополярные магнитные полюса 1, выполненные в виде сборок элементарных магнитов, и трековые модули 2 активной путевой структуры. Гетерополярные магнитные полюса 1 размещены симметрично друг другу относительно плоскости их симметрии 3, в которой в состоянии динамического состояния расположена и ось движения магнитолевитационного транспортного средства. Гетерополярные магнитные полюса 1 размещены в разных плоскостях, которые расположены под углом друг к другу и под углом β к плоскости движения магнитолевитационного транспортного средства. Трековые модули 2 активной путевой структуры также размещены симметрично друг другу относительно плоскости их симметрии 4, в которой в состоянии динамического состояния расположена и ось движения магнитолевитационного транспортного средства Трековые модули 2 размещены в разных плоскостях, которые расположены под углом друг к другу и под углом β к плоскости движения магнитолевитационного транспортного средства параллельны, при этом трековые модули 2 размещены параллельно соответствующим гетерополярным магнитным полюсам 1.
При смещении магнитолевитационного транспортного средства в любую сторону от оси его движения происходит увеличение воздушного зазора между трековым модулем 2 и гетерополярным магнитным полюсом 1 в одной части системы и одновременное уменьшение воздушного зазора между трековым модулем 2 и гетерополярным магнитным полюсом 1 в другой части системы. Поскольку зависимость силы магнитной индукции от расстояния, как известно, носит экспоненциальный характер, то изменение расстояния между гетерополярными магнитными полюсами I и трековыми модулями 2 приводит к появлению стабилизирующей силы, возвращающей магнитолевитационное транспортное средство в исходное состояние устойчивого динамического равновесия, при которой плоскости симметрии гетерополярных магнитных полюсов 1 и трековых модулей 2 совпадают.
Экспериментально установлено, что оптимальной величиной угла наклона гетерополярных магнитных полюсов 1 и трековых модулей 2 к плоскости движения магнитолевитационного транспортного средства является величина угла β в интервале 5-30 градусов, в котором жесткость отклика системы на попытку вывода ее из состояния динамического равновесия является достаточной для решения поставленной задачи.
Заявленное техническое решение может быть реализовано с использованием известных технических средств и технологий.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство динамической стабилизации магнитолевитационного транспортного средства | 2017 |
|
RU2651786C1 |
| Магнитолевитационное транспортное средство | 2019 |
|
RU2724030C1 |
| Транспортная система | 2016 |
|
RU2643900C1 |
| СТРЕЛОЧНЫЙ ПЕРЕВОД МАГНИТОЛЕВИТАЦИОННЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2017 |
|
RU2651787C1 |
| МАГНИТОЛЕВИТАЦИОННЫЙ СТРЕЛОЧНЫЙ ПЕРЕВОД БЕЗ МЕХАНИЧЕСКИХ И ПОДВИЖНЫХ УЗЛОВ | 2019 |
|
RU2745747C2 |
| Система магнитной левитации и боковой стабилизации магнитолевитационного транспортного средства | 2016 |
|
RU2647784C1 |
| СТРЕЛОЧНЫЙ ПЕРЕВОД МАГНИТОЛЕВИТАЦИОННЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2016 |
|
RU2651385C2 |
| Выдвижная спортивная или концертная крупногабаритная площадка | 2017 |
|
RU2643594C1 |
| СИСТЕМА МАГНИТНЫХ ЛИФТОВ В ПОДЗЕМНЫХ ВЫРАБОТКАХ | 2023 |
|
RU2810348C1 |
| ГИБРИДНЫЙ МАГНИТ БЕЗ ПОЛЕЙ РАССЕЯНИЯ ДЛЯ СИСТЕМЫ МАГЛЕВ | 2020 |
|
RU2743753C1 |
Изобретение относится к левитационным устройствам для транспортных средств. Магнитолевитационная транспортная система содержит узел боковой стабилизации магнитолевитационного транспортного средства и трековые модули активной путевой структуры. Узел боковой стабилизации включает в себя гетерополярные магнитные полюса, выполненные в виде сборок элементарных магнитов. Гетерополярные магнитные полюса размещены симметрично друг другу и оси движения транспортного средства в разных плоскостях, которые расположены под углом друг к другу и под углом 5-30 градусов к плоскости движения транспортного средства. При этом трековые модули активной путевой структуры также размещены симметрично друг другу и оси движения транспортного средства в разных плоскостях, которые расположены под углом друг к другу и под углом 5-30 градусов к плоскости движения транспортного средства. При этом трековые модули активной путевой структуры размещены параллельно соответствующим гетерополярным магнитным полюсам. Технический результат заключается в повышении эффективности боковой стабилизации магнитолевитационного транспортного средства. 2 ил.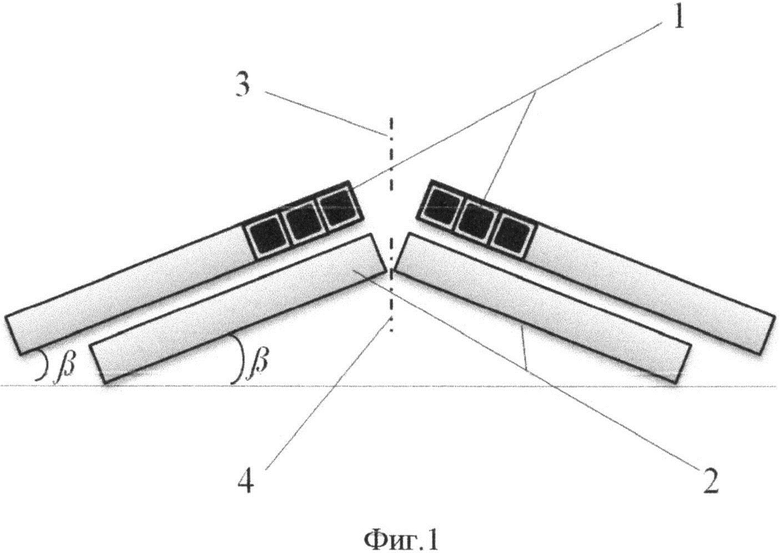
Магнитолевитационная транспортная система, содержащая узел боковой стабилизации магнитолевитационного транспортного средства, включающий гетерополярные магнитные полюса, выполненные в виде сборок элементарных магнитов, и трековые модули активной путевой структуры, отличающаяся тем, что гетерополярные магнитные полюса размещены симметрично друг другу и оси движения магнитолевитационного транспортного средства в разных плоскостях, которые расположены под углом друг к другу и под углом 5-30 градусов к плоскости движения магнитолевитационного транспортного средства, при этом трековые модули активной путевой структуры также размещены симметрично друг другу и оси движения магнитолевитационного транспортного средства в разных плоскостях, которые расположены под углом друг к другу и под углом 5-30 градусов к плоскости движения магнитолевитационного транспортного средства, при этом трековые модули активной путевой структуры размещены параллельно соответствующим гетерополярным магнитным полюсам.
| ОГРАНИЧИТЕЛЬ ПЕРЕМЕЩЕНИЙ ТРАНСПОРТНОГО СРЕДСТВА | 1999 |
|
RU2199451C2 |
| СИСТЕМА ВЫСОКОСКОРОСТНОГО НАЗЕМНОГО ТРАНСПОРТА | 1992 |
|
RU2025319C1 |
| Транспортное устройство с электродинамической подвеской и линейным синхронным двигателем | 1977 |
|
SU906122A1 |
| US 4276832 A, 07.07.1981 | |||
| US 2003217668 A1, 27.11.2003. | |||

