Изобретение относится к области магнитолевитационных транспортных средств, а именно к устройствам динамической стабилизации магнитолевитационных транспортных средств.
Для оценки новизны заявленного решения рассмотрим ряд известных технических средств аналогичного назначения, характеризуемых совокупностью сходных с заявленным устройством признаков.
Известно устройство боковой стабилизации магнитолевитационного транспортного средства, выполненное в виде горизонтальных боковых колес, см. Высокоскоростной магнитный транспорт с электродинамической левитацией / В.А. Дзензерский, В.И. Омельяненко, С.В. Васильев, В.И. Матин, С.А. Сергеев. Киев: Наукова Думка. - 2001. - 480 с. Данное устройство усложняет конструкцию магнитолевитационного транспортного средства и технические решения стрелочного перевода магнитолевитационных транспортных средств.
Данное техническое решение, как наиболее близкое к заявляемому по техническому существу и достигаемому результату, принято в качестве его прототипа.
Недостатком данного устройства является усложнение конструкции магнитолевитационного транспортного средства и технических решений стрелочного перевода магнитолевитационных транспортных средств.
Задачей изобретения является создание конструктивно простого и надежного в эксплуатации устройства динамической стабилизации магнитолевитационного транспортного средства, движущегося вдоль активной путевой структуры с левитационным зазором.
Сущность заявляемого технического решения выражается в следующей совокупности существенных признаков, достаточной для достижения указанного выше обеспечиваемого изобретением технического результата.
Согласно изобретению устройство динамической стабилизации магнитолевитационного транспортного средства характеризуется тем, что оно содержит два гетерополярных магнитных полюса, выполненных в виде сборок элементарных магнитов, расположенных в одной плоскости зеркально симметрично друг к другу под углом 15-40 градусов к продольной оси зеркальной симметрии, при этом магнитные полюса расположены на магнитолевитационном транспортном средстве таким образом, что вершина угла между ними направлена в сторону, противоположную направлению движения магнитолевитационного транспортного средства, параллельно плоскости реактивной шины, находящейся в активной путевой структуре.
Технический результат, достигаемый при реализации заявленной совокупности существенных признаков, заключается в том, что, поскольку гетерополярные магнитные полюса расположены в одной плоскости и зеркально симметричны друг к другу, под углом в интервале от 15 до 40 градусов к продольной оси зеркальной симметрии, то возникают разнонаправленные силы, действующие перпендикулярно направлению движения транспортного средства, которые уравновешивают друг друга в нормальном положении транспортного средства, а при малейшем принудительном отклонении транспортного средства это равновесие нарушается и равнодействующая этих сил возвращает транспортное средство в исходное состояние, обеспечивая динамическую стабилизацию транспортного средства.
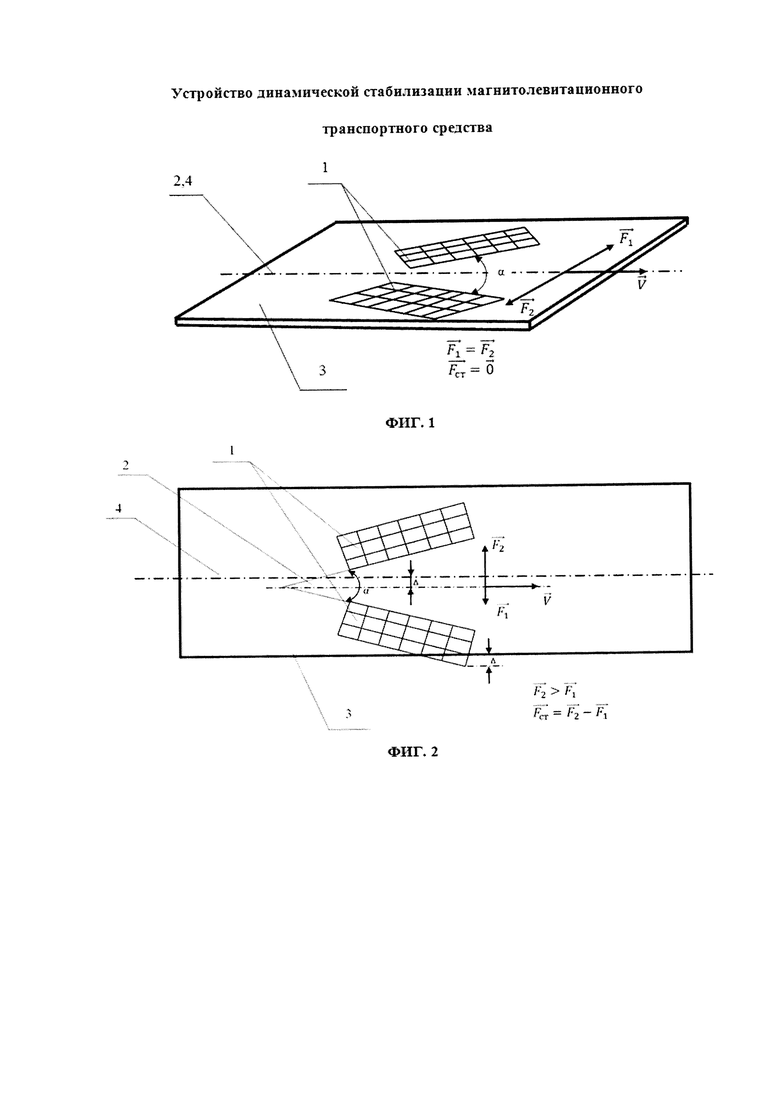
Сущность заявляемого технического решения поясняется чертежами, где на фиг. 1 представлена схема расположения двух гетерополярных магнитных полюсов относительно реактивной шины, находящейся в активной путевой структуре, на фиг. 2 - схема возникновения стабилизирующей силы.
Устройство динамической стабилизации магнитолевитационного транспортного средства включает два гетерополярных магнитных полюса 1, расположенных в одной плоскости и зеркально симметричных друг к другу, под углом α/2 в интервале 15-40 градусов к продольной оси 2 зеркальной симметрии параллельно плоскости реактивной шины 3, находящейся в активной путевой структуре (не показано). В состоянии равновесия продольная ось 2 симметрии устройства динамической стабилизации параллельна осевой линии 4 реактивной шины 3, с которой она находится в одной плоскости, при этом они не совпадают.
Заявленное устройство работает следующим образом.
При движении магнитолевитационного транспортного средства под воздействием магнитных полей, создаваемых гетерополярными магнитными полюсами 1, в реактивной шине 3 наводятся вихревые токи. Поскольку магнитные полюсы расположены в одной плоскости, зеркально симметричны друг к другу и расположены под углом α/2 в интервале от 15 до 40 градусов к продольной оси зеркальной симметрии 2, возникают динамические боковые силы  и
и  , порожденные взаимодействием магнитного поля вихревых токов и магнитного поля гетерополярных полюсов 1, действующие перпендикулярно направлению движения транспортного средства (вектор
, порожденные взаимодействием магнитного поля вихревых токов и магнитного поля гетерополярных полюсов 1, действующие перпендикулярно направлению движения транспортного средства (вектор  ).
).
При смещении магнитолевитационного транспортного средства на  происходит смещение одного из полюсов за пределы реактивной шины 3 и, т.к. силы
происходит смещение одного из полюсов за пределы реактивной шины 3 и, т.к. силы  и
и  зависят от рабочих площадей полюсов 1 над реактивной шиной 3, происходит превышение одной из сил
зависят от рабочих площадей полюсов 1 над реактивной шиной 3, происходит превышение одной из сил  , вследствие чего возникает результирующая стабилизирующая сила
, вследствие чего возникает результирующая стабилизирующая сила  , возвращающая транспортное средство в исходное состояние равновесия
, возвращающая транспортное средство в исходное состояние равновесия  , при котором рабочие площади полюсов над реактивной шиной равны между собой, обеспечивая тем самым динамическую стабилизацию транспортного средства.
, при котором рабочие площади полюсов над реактивной шиной равны между собой, обеспечивая тем самым динамическую стабилизацию транспортного средства.
То же самое происходит и при вертикальном расположении активной путевой структуры и устройства динамической стабилизации. При этом стабилизирующая сила  составляет часть подъемной силы магнитолевитационного транспортного средства.
составляет часть подъемной силы магнитолевитационного транспортного средства.
Заявленное техническое решение представляет собой конструктивно простое и надежное в эксплуатации средство стабилизации магнитолевитационного транспортного средства.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАГНИТОЛЕВИТАЦИОННОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2017 |
|
RU2680880C1 |
| Магнитолевитационное транспортное средство | 2019 |
|
RU2724030C1 |
| Транспортная система | 2016 |
|
RU2643900C1 |
| Выдвижная спортивная или концертная крупногабаритная площадка | 2017 |
|
RU2643594C1 |
| СТРЕЛОЧНЫЙ ПЕРЕВОД МАГНИТОЛЕВИТАЦИОННЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2017 |
|
RU2651787C1 |
| УСТРОЙСТВО МАГНИТНОЙ ЛЕВИТАЦИИ ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2539304C2 |
| МАГНИТОЛЕВИТАЦИОННЫЙ СТРЕЛОЧНЫЙ ПЕРЕВОД БЕЗ МЕХАНИЧЕСКИХ И ПОДВИЖНЫХ УЗЛОВ | 2019 |
|
RU2745747C2 |
| УСТРОЙСТВО МАГНИТНОЙ ЛЕВИТАЦИИ И ПОПЕРЕЧНОЙ СТАБИЛИЗАЦИИ ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2523875C1 |
| СТРЕЛОЧНЫЙ ПЕРЕВОД МАГНИТОЛЕВИТАЦИОННЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2016 |
|
RU2651385C2 |
| ГИБРИДНЫЙ МАГНИТ БЕЗ ПОЛЕЙ РАССЕЯНИЯ ДЛЯ СИСТЕМЫ МАГЛЕВ | 2020 |
|
RU2743753C1 |
Изобретение относится к области магнитных подвесок для транспортных средств. Устройство динамической стабилизации магнитолевитационного транспортного средства содержит два гетерополярных магнитных полюса, выполненных в виде сборок элементарных магнитов. Магнитные полюса расположены в одной плоскости зеркально симметрично друг к другу под углом 15-40 градусов к продольной оси зеркальной симметрии. Магнитные полюса расположены на магнитолевитационном транспортном средстве таким образом, что вершина угла между ними направлена в сторону, противоположную направлению движения магнитолевитационного транспортного средства. Магнитные полюса расположены параллельно плоскости реактивной шины, находящейся в активной путевой структуре. Технический результат изобретения заключается в повышении надежности устройства динамической стабилизации магнитолевитационного транспортного средства. 2 ил.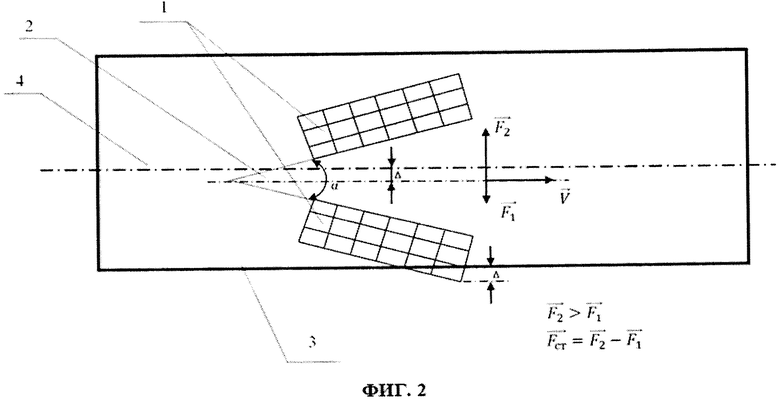
Устройство динамической стабилизации магнитолевитационного транспортного средства, отличающееся тем, что оно содержит два гетерополярных магнитных полюса, выполненных в виде сборок элементарных магнитов, расположенных в одной плоскости зеркально симметрично друг к другу под углом 15-40 градусов к продольной оси зеркальной симметрии, при этом магнитные полюса расположены на магнитолевитационном транспортном средстве таким образом, что вершина угла между ними направлена в сторону, противоположную направлению движения магнитолевитационного транспортного средства, параллельно плоскости реактивной шины, находящейся в активной путевой структуре.
| ОГРАНИЧИТЕЛЬ ПЕРЕМЕЩЕНИЙ ТРАНСПОРТНОГО СРЕДСТВА | 1999 |
|
RU2199451C2 |
| СИСТЕМА ВЫСОКОСКОРОСТНОГО НАЗЕМНОГО ТРАНСПОРТА | 1992 |
|
RU2025319C1 |
| БАЗОВЫЙ ЭЛЕМЕНТ ТРАНСПОРТНОЙ СИСТЕМЫ | 2003 |
|
RU2247040C1 |
| US 20160257220 A1, 08.09.2016. | |||

