Изобретение относится к железнодорожному транспорту и может быть использовано для повышения безопасности движения в системах интервального регулирования движения железнодорожных грузовых и пассажирских составов на участках с интенсивным движением, использующих каналы радиосвязи.
Известна система интервального регулирования движения поездов, содержащая включенные в систему реального времени, заключенное в общий блок, расположенный в кабине машиниста, микропроцессорное устройство обработки информации, соединенное цифровым интерфейсом с комплексным устройством локомотивной безопасности, заключенный в общий блок, расположенный на последнем вагоне железнодорожного состава, приемник спутниковых навигационных сигналов, объединенный с цифровой радиостанцией УВК диапазона, при этом микропроцессорное устройство обработки информации выполнено с возможностью воздействия через усилитель на электропневматический клапан экстренного торможения, возможностью анализа принятых от других модулей данных и принятии окончательного решения о скоростном режиме движения железнодорожного состава, а также с возможностью контроля целостности железнодорожного состава (RU 78757, B61L 25/04, 10.12.2008).
Недостатком этой системы является централизованный обмен информацией между поездами посредством устройств станционной радио и проводной связи.
В качестве прототипа принята система децентрализованного интервального регулирования движения поездов, содержащая установленный на локомотиве локомотивный навигационный приемник с антенной, принимающий сигнал от спутниковой группировки, а также устройство обработки, причем выход навигационного приемника соединен с первым входом устройства обработки, при этом в систему введены приемник линии связи, приемная антенна, хвостовое навигационное устройство с антеннами, причем сигнал со спутниковой группировки через антенну поступает в хвостовое навигационное устройство, расположенное на хвостовом вагоне впереди идущего поезда, с которого обработанная необходимым образом информация через антенну и по линии связи поступает на вход приемной антенны, выход которой подключен ко второму входу устройства обработки, в котором вычисляются координаты локомотива и хвостового вагона впереди идущего поезда с последующим определением расстояния между ними и на выходе которого формируется управляющая информация.(RU2664023, B61L 23/34, 14.08.2018).
Недостатком этой системы является невысокая точность поддержания допустимого межпоездного интервала между попутно следующими на перегонах поездами из-за отсутствия информации о номере пути, по которому движется поезд, данных о целостности поезда, фактической скорости поезда, а также низкого уровеня защищенности каналов передачи данных.
Технический результат изобретения заключается в повышении безопасности движения и пропускной способности за счет повышения точности поддержания допустимого межпоездного интервала между попутно следующими на перегонах поездами при автоматическом управлении локомотивными бортовыми устройствами.
Технический результат достигается тем, что в децентрализованной системе интервального регулирования движения поездов с автоматизированным управлением, содержащей установленные на каждом локомотиве блок обработки данных с подключенными к нему навигационным приемником, приемопередатчиком и блоком энергонезависимой памяти, выход блока обработки данных соединен со входом блока управления локомотивом, а в хвостовом вагоне каждого поезда установлен приемопередатчик с подключенным к нему модулем обработки данных, согласно изобретению в хвостовом вагоне каждого поезда в тормозной магистрали установлен датчик давления, выход которого подключен к модулю обработки данных, а установленный на каждом локомотиве блок обработки данных состоит из модуля выбора объектов пути по номеру пути и направлению движения и из последовательно соединенных модуля определения местоположения головы поезда, модуля вычисления местоположения хвоста поезда и модуля формирования сообщений по радиоканалу, при этом выходы модуля выбора объектов пути по номеру пути и направлению движения и модуля определения местоположения головы поезда соединены с соответствующими входами модуля выбора списка актуальных объектов пути впереди поезда, выход которого соединен со входом модуля выбора приоритетных актуальных объектов, выходом подключенного к вычислителю профиля скорости движения, второй вход которого соединен с модулем вычисления времени движения между станциями, а выход – подключен к первому входу модуля сравнения динамического и статического профилей скоростей, ко второму входу которого подключен модуль построения динамического профиля скоростей, входом соединенный с модулем обработки данных от впередиидущего поезда, входы модулей определения местоположения головы поезда и выбора объектов пути по номеру пути и направлению движения подключены соответственно к выходу навигационного приемника и к блоку энергонезависимой памяти, входы/выходы модуля формирования сообщений по радиоканалу и модуля обработки данных от впередиидущего поезда соединены с выходами/входами приемопередатчика, а выход модуля сравнения динамического и статического профилей скоростей соединен с входом блока управления локомотивом.
Управление фактической скоростью в предлагаемой системе осуществляется следующим образом: для каждой станции, которая включена в график движения, имеется время её проезда поездом. При нахождении на такой станции на борту локомотива производится выбор объектов пути, находящихся между этой и следующей по направлению движения станцией, проезд которых требует снижения скорости движения. Вычислив время, необходимое для достижения следующей станции в рамках графика, строится профиль скоростей, который определяет значение фактической скорости в каждой координате пути и в каждый момент времени. Профиль скоростей состоит из участков профиля, построенных между двумя объектами ограничения скорости из списка выбранных объектов. Каждый участок профиля скоростей имеет отрезки плавного набора и снижения скорости и отрезок движения с постоянной скоростью. Профиль скорости сохраняется до следующей станции. При получении данных с впередиидущего поезда, определяется, какая скорость в профиле соответствует железнодорожной координате впереди идущего поезда. Поезд продолжает движение по профилю, если скорость впереди идущего поезда выше или равна скорости из профиля. Если скорость впереди идущего поезда меньше, то строится дополнительный динамический профиль, сначала до точки несоответствия, затем достраивается по мере поступления данных от впереди идущего поезда.
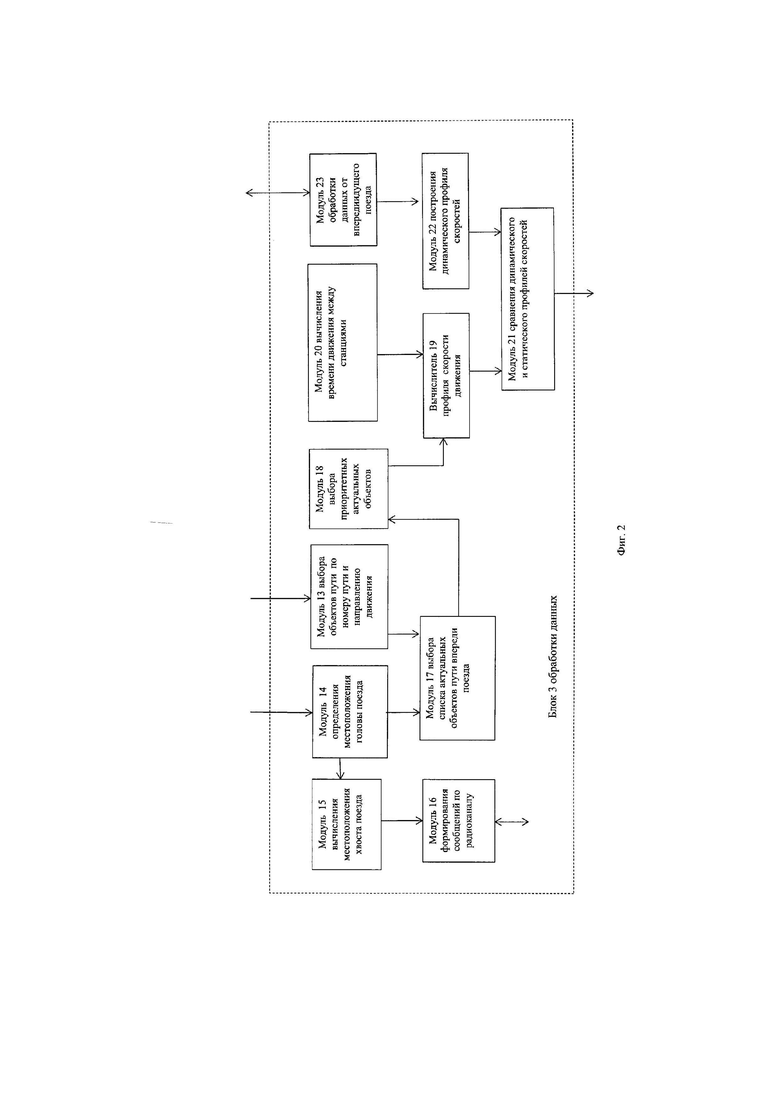
На чертеже (фиг.1) представлена схема децентрализованной системы интервального регулирования движения поездов с автоматизированным управлением. На фиг.2 представлена схема блока обработки данных.
Децентрализованная система интервального регулирования движения поездов с автоматизированным управлением содержит установленные на каждом локомотиве 1 (2) блок 3 обработки данных с подключенными к нему навигационным приемником 4, приемопередатчиком 5 и блоком 6 энергонезависимой памяти, выход блока 3 обработки данных соединен со входом блока 7 управления локомотивом, а в хвостовом вагоне 8 (9) каждого поезда установлен приемопередатчик 10 с подключенным к нему модулем 11 обработки данных, в тормозной магистрали хвостового вагона 8 (9) каждого поезда установлен датчик 12 давления, выход которого подключен к модулю 11 обработки данных, а установленный на каждом локомотиве 1 (2) блок 3 обработки данных состоит из модуля 13 выбора объектов пути по номеру пути и направлению движения и из последовательно соединенных модуля 14 определения местоположения головы поезда, модуля 15 вычисления местоположения хвоста поезда и модуля 16 формирования сообщений по радиоканалу, при этом выходы модуля 13 выбора объектов пути по номеру пути и направлению движения и модуля 14 определения местоположения головы поезда соединены с соответствующими входами модуля 17 выбора списка актуальных объектов пути впереди поезда, выход которого соединен со входом модуля 18 выбора приоритетных актуальных объектов, выходом подключенного к вычислителю 19 профиля скорости движения, второй вход которого соединен с модулем 20 вычисления времени движения между станциями, а выход – подключен к первому входу модуля 21 сравнения динамического и статического профилей скоростей, ко второму входу которого подключен модуль 22 построения динамического профиля скоростей, входом соединенный с модулем 23 обработки данных от впередиидущего поезда, входы модулей 14 и 13 определения местоположения головы поезда и выбора объектов пути по номеру пути и направлению движения подключены соответственно к выходу навигационного приемника 4 и к блоку 6 энергонезависимой памяти, входы/выходы модуля 16 формирования сообщений по радиоканалу и модуля 23 обработки данных от впередиидущего поезда соединены с выходами/входами приемопередатчика 5, а выход модуля 21 сравнения динамического и статического профилей скоростей соединен с входом блока 7 управления локомотивом.
Децентрализованная система интервального регулирования движения поездов с автоматизированным управлением работает следующим образом.
На станции формирования поездов на хвостовой вагон 8 (9) закрепляется съёмное устройство, включающее в себя датчик 12 давления, приёмопередатчик 10 и модуль 11 обработки данных, на локомотиве 1 установлен приёмопередатчик 5 для поддерживания радиосвязи с хвостовым вагоном 8 поезда и следующим за ним поездом. Перед поездкой блоку 3 обработки данных локомотива 1 и модулю 11 обработки данных хвостового вагона 8 одного поезда присваивается уникальный номер с признаком голова/хвост, это может быть номер локомотива.
Локомотив оборудован одним из известных устройств безопасности (КЛУБ/БЛОК), имеющим в составе энергонезависимую память с постоянными характеристиками поезда, модуль измерения фактической скорости движения, навигационный приёмник с антенной, энергонезависимую память для хранения электронной карты участка движения с описанием объектов пути и графика движения поездов.
Обмен данными между локомотивом 1 и хвостовым вагоном 8 одного поезда осуществляется периодически (раз в секунду) для передачи показаний датчика 12 давления, установленного в хвостовом вагоне 8 в тормозной магистрали поезда на локомотив 1. По данным датчика 12 давления определяется целостность поезда (значение отличное от нуля), вычисляется длина поезда в соответствии с постоянными характеристиками поезда, хранящимися в блоке 6 энергонезависимой памяти. По географическим координатам навигационного приёмника 4 и электронной карте, записанной в блоке 6 энергонезависимой памяти, раз в секунду вычисляется местоположение головы поезда в железнодорожных координатах в модуле 14 определения местоположения головы поезда. По результатам вычисления местоположения локомотива 1 и длины поезда периодически раз в секунду определяется местоположение хвостового вагона 8 поезда в модуле 15 вычисления местоположения хвоста поезда.
Для передачи информации на поезд, идущий следом, в модуле 16 формирования сообщений по радиоканалу формируется пакет данных, включающий координату хвоста поезда в железнодорожных координатах, признак целостности, фактическую скорость движения, номер пути следования.
Пакет сформированных данных вместе с информацией идентифицирующей поезд передаётся в приемопередатчик 10 хвостового вагона 8 для ретрансляции следующему за ним поезду. Передача пакета осуществляется периодически раз в секунду.
В модуле 13 выбора объектов пути по номеру пути и направлению движения создаётся список объектов с координатой их расположения на пути и разрешённой скоростью проезда по данным электронной карты участка в соответствии с путём следования и направлением движения. В модуле 17 выбора списка актуальных объектов пути впереди поезда в соответствии с вычисленным местоположением поезда из общего списка объектов выбирается список актуальных объектов пути, находящихся перед головой поезда и влияющих на построение профиля скоростей между станциями. В модуле 18 выбора приоритетных актуальных объектов к полученному списку актуальных объектов добавляются временные объекты ограничения скорости, данные о которых поступают по радиоканалу со станции, и распределяются в порядке близости к голове поезда.
В модуле 20 вычисления времени движения между станциями вычисляется время проезда, на основе полученного времени и списка приоритетных актуальных объектов строится профиль скорости в модуле 19 вычислителя профиля скорости движения, где в каждый момент времени координате пути соответствует скорость движения.
В модуле 19 вычислителя профиля скорости определяются допустимые скорости проезда объектов. Входными данными для вычисления профиля скоростей являются допустимые скорости проезда объектов пути, расстояние между объектами и время, которое должно быть затрачено на движение от одного объекта к другому. Для плавного изменения скорости, участки набора и снижения выполняются ступенями, с заданным временем и величиной одной ступени изменения скорости (величина времени и скорости одной ступени может отличаться для разных типов поездов) их значения могут быть внесены в модуль постоянных параметров энергонезависимой памяти. При расчёте профиля подсчитывается количество ступеней набора скорости, время набора скорости и расстояние, необходимое для набора скорости, расстояние и время движения с постоянной скоростью, количество ступеней снижения скорости, время и расстояние, необходимое для снижения скорости.
Оба поезда следующих друг за другом, оборудованы одинаково, алгоритм вычисления профиля фактической скорости движения аналогичный. Поезд следует до следующей станции со скоростью согласно вычисленному профилю, если впереди нет поезда.
Данные от впередиидущего поезда: железнодорожная координата, признак целостности и фактическая скорость движения определяются в модуле 23 обработки данных от впередиидущего поезда, и на основе этих сведений строится динамический профиль скоростей в модуле 22 построения динамического профиля скоростей. В модуле 21 сравнения динамического и статического профиля скоростей сравниваются скорости вычисленных профилей и выбирается приоритетная скорость движения.
Если впередиидущий поезд передаёт признак целостности, то периодически, после прихода пакета данных, фактическая скорость движения впередиидущего поезда сравнивается с вычисленной скоростью профиля в точке с такой же железнодорожной координатой. Поезд продолжает движение по вычисленному профилю в случае, когда фактическая скорость впередиидущего поезда выше или равна вычисленной скорости поезда на координате нахождения впередиидущего поезда.
Если приходят данные о потери целостности впередиидущего поезда или радиосвязь внезапно прерывается, то строится дополнительный динамический профиль скорости с учётом остановки в точке, где впередиидущий поезд был целым или где был последний сеанс связи, до получения дальнейших указаний от станции.
Если вычисленная скорость по профилю выше фактической скорости движения впереди идущего поезда, то необходимо построить дополнительный профиль скорости до координаты, где произошло несоответствие скоростей, вычисляется количество ступеней торможения, время и расстояние участка торможения с учётом, что на координате нахождения впереди идущего поезда скорость движения следующего за ним поезда должна быть не более скорости первого поезда. С приходом каждого следующего пакета данных дополнительный профиль скоростей должен достраиваться, конечной координатой должна быть координата станции или координата остановки. Это повышает безопасность движения, исключив столкновение поездов, в то же время позволяет сохранять скоростной режим без необоснованного простоя поездов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система интервального регулирования движения поездов | 2021 |
|
RU2761485C1 |
| Система интервального регулирования движения поездов | 2020 |
|
RU2743103C1 |
| Система интервального регулирования движения поездов | 2021 |
|
RU2753990C1 |
| Способ интервального регулирования движения поездов | 2024 |
|
RU2832521C1 |
| ХВОСТОВОЕ УСТРОЙСТВО КОНТРОЛЯ ЦЕЛОСТНОСТИ ПОЕЗДА | 2021 |
|
RU2764478C1 |
| Система управления движением поездов в режиме виртуальной сцепки | 2024 |
|
RU2828911C1 |
| Способ оценки собственного местоположения транспортного средства, преимущественно высокоскоростного поезда, и устройство для оценки собственного местоположения транспортного средства, преимущественно высокоскоростного поезда | 2023 |
|
RU2809391C1 |
| Система интервального регулирования движения поездов | 2021 |
|
RU2776133C1 |
| Система для управления движением поездов | 2020 |
|
RU2737813C1 |
| Система для управления движением поездов | 2021 |
|
RU2766016C1 |
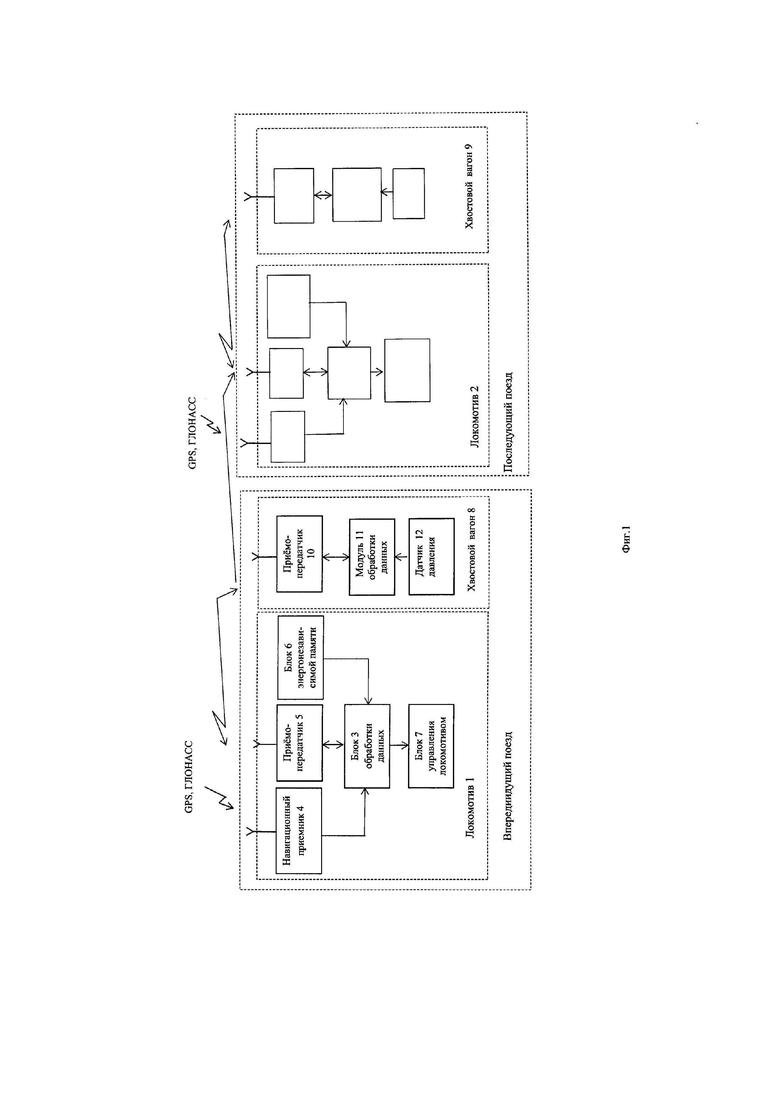
Изобретение относится к средствам интервального регулирования движения поездов с автоматизированным управлением. Система содержит установленные на каждом локомотиве 1 (2) блок 3 обработки данных, навигационный приемник 4, приемопередатчик 5, блок 6 энергонезависимой памяти и блок 7 управления локомотивом, в хвостовом вагоне 8 (9) каждого поезда установлен приемопередатчик 10 с модулем 11 обработки данных, в тормозной магистрали хвостового вагона 8 (9) каждого поезда установлен датчик 12 давления. При этом локомотивный блок 3 обработки данных включает модуль 13 выбора объектов пути по номеру пути и направлению движения, модуль 14 определения местоположения головы поезда, модуль 15 вычисления местоположения хвоста поезда, модуль 16 формирования сообщений по радиоканалу, модуль 17 выбора списка актуальных объектов пути впереди поезда, модуль 18 выбора приоритетных актуальных объектов, вычислитель 19 профиля скорости движения, модуль 20 вычисления времени движения между станциями, модуль 21 сравнения динамического и статического профилей скоростей, модуль 22 построения динамического профиля скоростей и модуль 23 обработки данных от впередиидущего поезда. Достигается повышение точности поддержания допустимого межпоездного интервала при автоматическом управлении локомотивными бортовыми устройствами. 2 ил.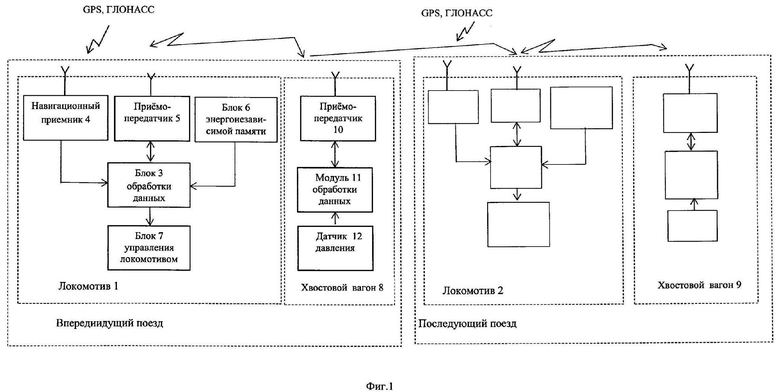
Децентрализованная система интервального регулирования движения поездов с автоматизированным управлением, содержащая установленные на каждом локомотиве блок обработки данных с подключенными к нему навигационным приемником, приемопередатчиком и блоком энергонезависимой памяти, выход блока обработки данных соединен со входом блока управления локомотивом, а в хвостовом вагоне каждого поезда установлен приемопередатчик с подключенным к нему модулем обработки данных, отличающаяся тем, что в хвостовом вагоне каждого поезда в тормозной магистрали установлен датчик давления, выход которого подключен к модулю обработки данных, а установленный на каждом локомотиве блок обработки данных состоит из модуля выбора объектов пути по номеру пути и направлению движения и из последовательно соединенных модуля определения местоположения головы поезда, модуля вычисления местоположения хвоста поезда и модуля формирования сообщений по радиоканалу, при этом выходы модуля выбора объектов пути по номеру пути и направлению движения и модуля определения местоположения головы поезда соединены с соответствующими входами модуля выбора списка актуальных объектов пути впереди поезда, выход которого соединен со входом модуля выбора приоритетных актуальных объектов, выходом подключенного к вычислителю профиля скорости движения, второй вход которого соединен с модулем вычисления времени движения между станциями, а выход – подключен к первому входу модуля сравнения динамического и статического профилей скоростей, ко второму входу которого подключен модуль построения динамического профиля скоростей, входом соединенный с модулем обработки данных от впередиидущего поезда, входы модулей определения местоположения головы поезда и выбора объектов пути по номеру пути и направлению движения подключены соответственно к выходу навигационного приемника и к блоку энергонезависимой памяти, входы/выходы модуля формирования сообщений по радиоканалу и модуля обработки данных от впередиидущего поезда соединены с выходами/входами приемопередатчика, а выход модуля сравнения динамического и статического профилей скоростей соединен с входом блока управления локомотивом.
| RU 138441 U1, 20.03.2014 | |||
| СИСТЕМА ДЛЯ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДА НА ПЕРЕГОНЕ | 2014 |
|
RU2548645C1 |
| Способ и система децентрализованного интервального регулирования движения поездов | 2017 |
|
RU2664023C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ЭЛЕКТРОПОДВИЖНОГО СОСТАВА | 2006 |
|
RU2326016C2 |
| WO 2008073545 A2, 19.06.2008. | |||

