Изобретение относится к железнодорожному транспорту и предназначено для интервального регулирования железнодорожных транспортных средств и железнодорожных поездов на участках с интенсивным движением поездов.
Известен способ интервального регулирования движения поездов на перегонах, заключающийся в том, что перегон делят на блок-участки, оборудованные рельсовыми цепями для контроля свободности пути, ограждаемые путевыми светофорами, и управляют огнями светофоров в зависимости от количества свободных блок-участков перед идущим поездом (патент РФ №2305043).
Этот способ реализован в импульсно-проводной, кодовой и других типах автоблокировки, использующих различные технические средства. Его недостатками являются низкие надежность и помехоустойчивость.
Известен также способ интервального регулирования движения поездов, реализуемый системами полуавтоматической блокировки (ПАБ), при котором дежурные соседних станций при приеме и отправлении поездов обмениваются друг с другом блокировочными сигналами "Прибытие поезда в полном составе" и "Согласие на отправление поезда", которые фиксируются и используются устройствами ПАБ таким образом, что открытие выходного сигнала и отправление поезда невозможно без подтверждения соседней станцией согласия на прием поезда и подтверждения прибытия предыдущего поезда в полном составе (см. Казаков А.А. и др. Системы интервального регулирования движения поездов. М.: Транспорт, 1986 г., стр. 342-350).
Его недостатком является невысокая пропускная способность, так как при данном способе одновременно на перегоне может находиться только один поезд, пакетное движение поездов невозможно.
Известно устройство по патенту РФ №2265543, которое определяет величину сближения двух транспортных средств по их координатам.
К недостаткам можно отнести невозможность определения расстояния между протяженными транспортными объектами, такими как, например, железнодорожные поезда.
Из известных устройств наиболее близким к предлагаемому является «Устройство для управления движением поездов с помощью искусственных спутников Земли» по патенту РФ №2305044, которое и выбрано в качестве прототипа.
Недостатком данного устройства является централизованный характер управления интервальным движением железнодорожных транспортных средств
На фиг. 1 показан принцип работы системы по способу.
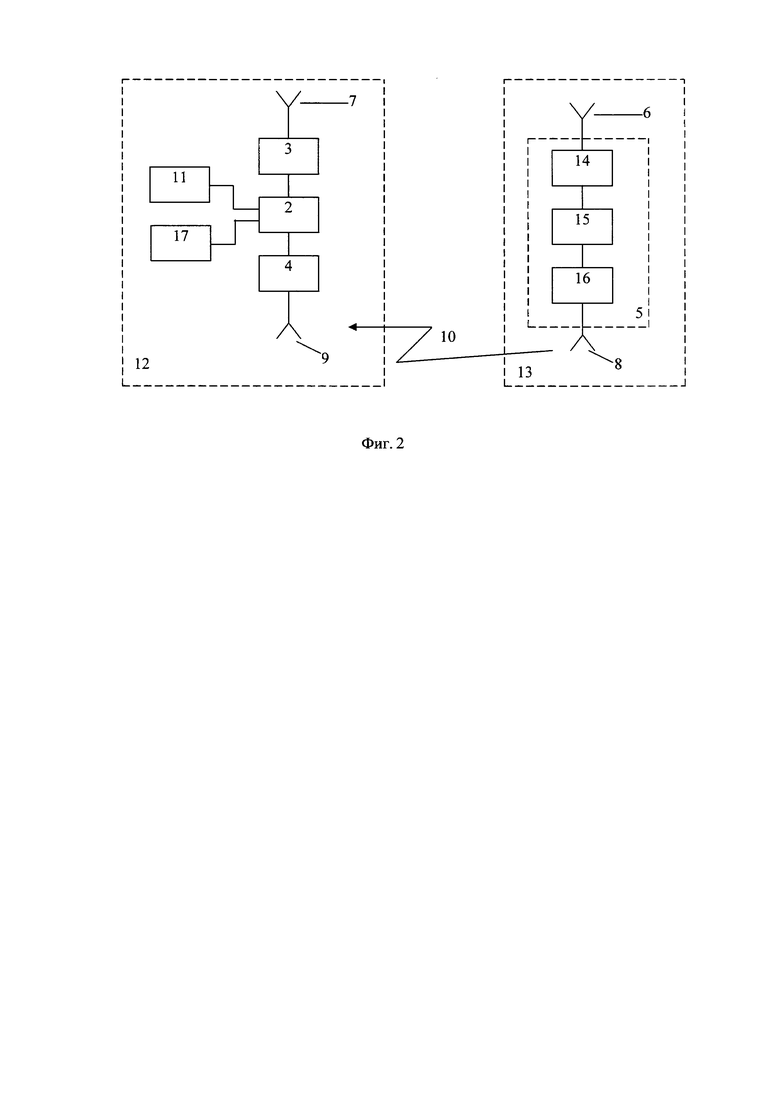
На фиг. 2 показан вариант структурной схемы системы.
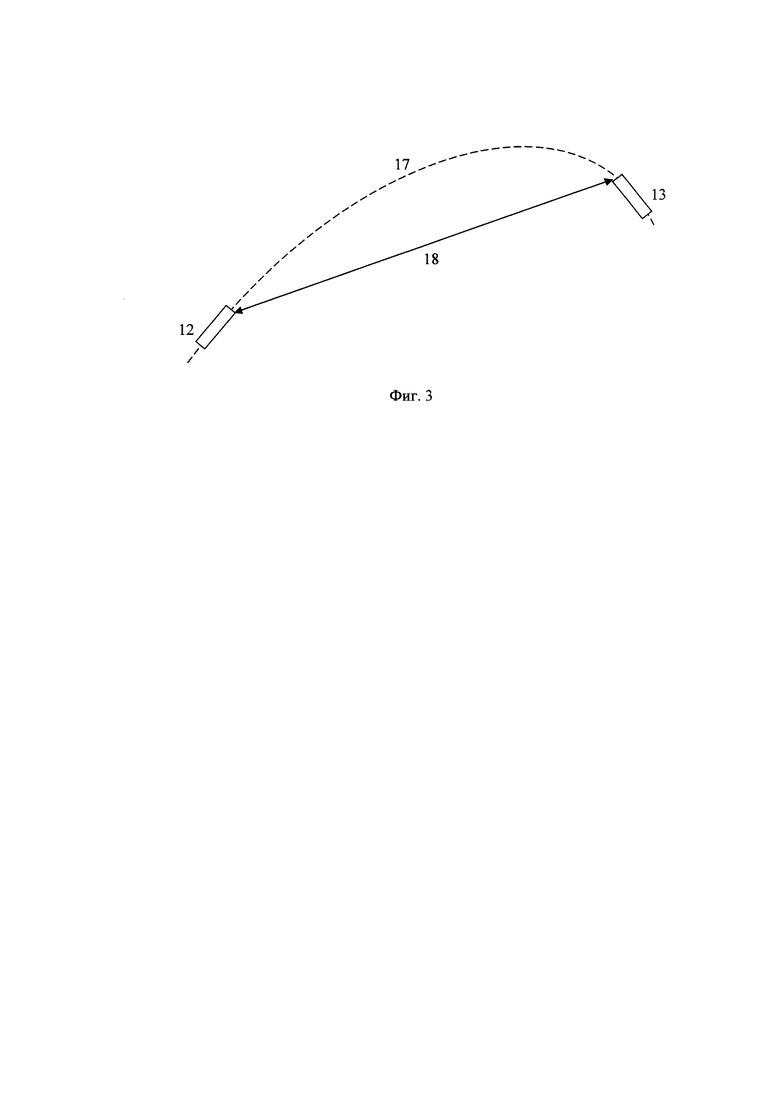
На фиг. 3 показан рисунок, поясняющий принцип определения реального расстояния до предыдущего железнодорожного поезда.
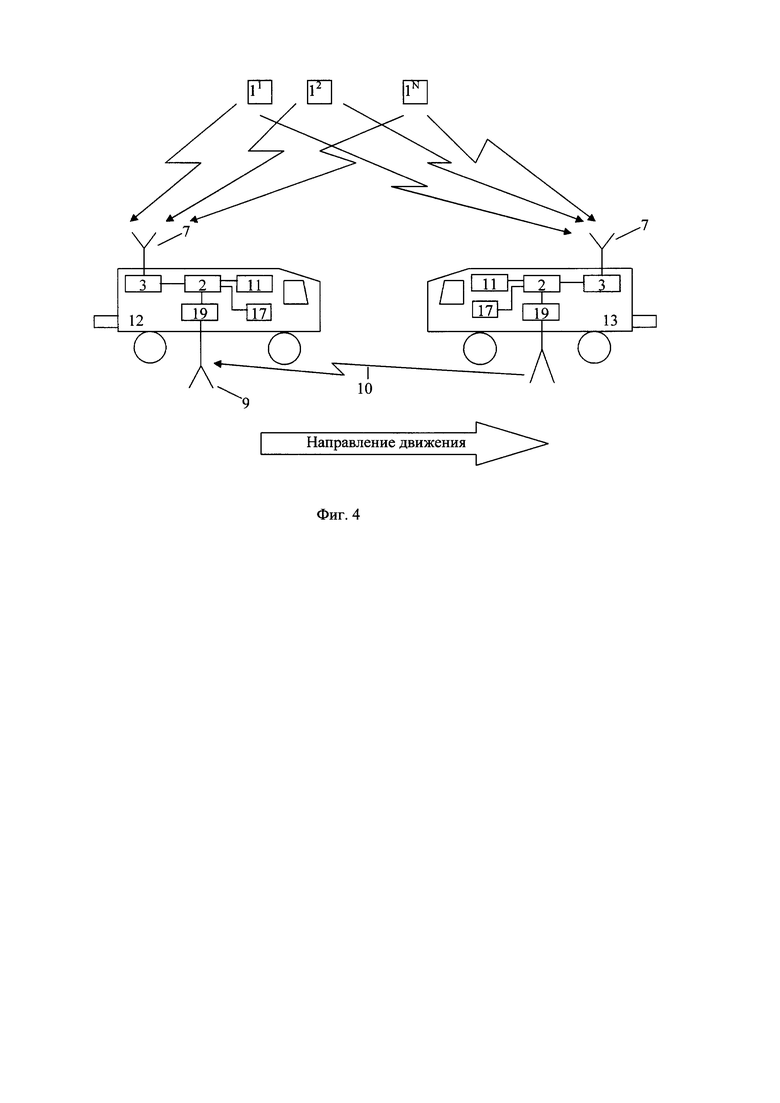
На фиг. 4 показан вариант системы для электропоездов.
Для децентрализованного интервального регулирования движения железнодорожных поездов, в частности двух железнодорожных поездов, по предлагаемому способу используются два навигационных устройства для определения текущих координат, одно из которых располагается на локомотиве, а второе - на хвостовом вагоне впереди идущего железнодорожного поезда, которое устанавливается после его формирования. Периодически измеряемая информация о координате хвостового вагона 13 с привязкой по времени передается хвостовым навигационным устройством 5 по линии связи 10, предпочтительно радиоканалу, на локомотив 12. Данная информация обрабатывается совместно с информацией, полученной локомотивным навигационным приемником 3. На основании сравнения двух координат, вычисленных путем решения навигационных уравнений, локомотива 12 и хвостового вагона 13 впереди идущего железнодорожного поезда, вычисляется информация о расстоянии между двумя железнодорожными поездами, при этом учитывается профиль пути. Локомотивный навигационный приемник 3 и хвостовое навигационное устройство 5 предпочтительно выполнять в виде приемников сигналов спутниковой радионавигационной системы (СРНС), например GPS и/или ГЛОНАСС.
Система по данному способу состоит из двух подсистем, соединенных линией связи 10. Одна стационарная подсистема располагается на локомотиве 12 и состоит из локомотивного навигационного приемника 3, вход которого соединен с антенной 7 для приема навигационных сигналов. Выход локомотивного навигационного приемника 3 соединен с первым входом устройства 2 обработки данных. Второй вход устройства 2 обработки данных соединен с выходом приемника линии связи 4, на вход которого через приемную антенну 9 поступает сигнал со второй подсистемы, содержащей хвостовое навигационное устройство 5 и установленной на хвостовом вагоне 13 впереди идущего железнодорожного поезда. Устройство 2 обработки данных на основании информации, полученной с локомотивного навигационного приемника 3 и приемника линии связи 4, формирует информационный сигнал о расстоянии между локомотивом 12 и хвостовым вагоном 13 впереди идущего железнодорожного поезда. Вторая подсистема является съемной и размещается на хвостовом вагоне 13 железнодорожного поезда после его формирования и состоит из последовательно соединенных антенны 6, навигационного приемника 14, микропроцессорного устройства 15 предварительной обработки, передатчика 16 и антенны 8. Вторая, хвостовая подсистема устанавливается на хвостовом вагоне 13 и находится на нем до расформирования железнодорожного поезда.
Система работает следующим образом.
На станции формирования железнодорожных поездов на хвостовой вагон 13 железнодорожного поезда закрепляется любым известным способом навигационное устройство 5. После начала движения информация с координатами периодически, например, 1 раз в секунду, поступает с хвостового навигационного устройства 5 по линии связи 10 через расположенный на локомотиве 12 следующего железнодорожного поезда приемник линии связи 4 в устройство обработки данных 2 на второй вход. С выхода локомотивного навигационного приемника 3 информация поступает по проводной линии на первый вход устройства обработки данных 2, в котором путем решения навигационных уравнений определяются координаты. В устройстве обработки данных 2 происходит синхронизация по времени координат локомотива 12 и хвостового вагона 13 и вычисляется расстояние между ними. Данный результат выводится на локомотивный информационный дисплей 17 и/или в виде управляющих команд на устройство регулирования скорости 11 железнодорожного поезда.
В устройстве обработки данных 2 хранится профиль пути. На фиг. 3 показан реально пройденный путь 17 хвостовым навигационным устройством 5 от точки текущего положения локомотивного навигационного приемника 3. Без учета профиля пути устройство обработки данных 2 будет определять расстояние между локомотивным навигационным приемником 3 и хвостовым навигационным устройством 5 как расстояние 18, что может привести к понижению достоверности определения расстояния между железнодорожными поездами на криволинейных участках пути. С учетом профиля пути, запрограммированного заранее или сформированного на основании данных, периодически получаемых с хвостового навигационного устройства 3, расстояние между железнодорожными поездами определяется на основании реально пройденного пути 17.
Навигационные приемники 3 и 14 могут быть выполнены в виде приемника спутниковой радионавигационной системы и реализованы, например, в виде стандартного приемника ГЛОНАС/GPS или по патенту РФ №2161317.
При использовании сигналов спутниковой радионавигационной системы (СРНС) для определения начальных координат локомотива 12 и хвостового вагона 13 на станциях формирования поездов для повышения точности могут использоваться сигналы корректирующих станций [Духин С.В. и др. Формирование единого геоинформационного пространства // Автоматика, связь, информатика, №9, с. 11-13].
Для приема навигационных сигналов навигационные приемники имеют приемные антенны, настроенные на соответствующую частоту. Передатчик линии связи и приемник линии связи настроены на один частотный диапазон и имеют соответственно передающую и приемную антенны. При этом передающая антенна может быть выполнена в виде узконаправленной микрополосковой антенны, максимум диаграммы которой направлен назад по ходу движения. Приемная антенна также может быть выполнена в виде узконаправленной микрополосковой антенны, максимум диаграммы которой направлен вперед по ходу движения.
Устройство обработки данных 2 может быть выполнено в виде стандартного микропроцессорного блока или контроллера с соответствующим программным обеспечением.
Каждое хвостовое навигационное устройство 5 в микропроцессорном устройстве предварительной обработки 15 формирует уникальный код, который передается в поезде информации передатчиком линии связи 16 и который позволяет приемнику линии связи 4, расположенному на локомотиве, однозначно идентифицировать впереди идущие железнодорожные поезда и их координаты.
При кратковременных пропаданиях сигналов на приемнике линия связи 4 с хвостовых навигационных устройств 5 впереди идущего железнодорожного поезда в устройстве обработки данных 2 может вырабатываться вероятностная модель движения впереди идущего железнодорожного поезда, исходя из ранее полученных данных о его скорости и профиля пути.
В частном случае, в отсутствие железнодорожных вагонов в железнодорожном поезде, т.е. при наличии только одного локомотива, в качестве хвостового навигационного устройства может использоваться локомотивный навигационный приемник при условии наличия на локомотиве передатчика линия связи, соединенного с выходом устройства обработки данных для передачи своих координат на следующий за ним железнодорожный поезд.
В частном случае, для электричек оба навигационных устройства могут иметь одинаковую структурную схему. Вместо приемника 4 используется приемопередатчик 19, который выполняет функции приемника 4, если навигационное устройство находится в первом по направлению движения вагоне и выполняет функцию передатчика 16, если он находится в последнем по направлению движения вагоне. Выбор режима определяется устройством обработки данных 2 в зависимости от сигналов, поступающих с устройства управления электропоезда. Если вагон электропоезда является последним в составе электропоезда, то устройством обработки данных 2 отключаются устройство регулирования скорости 11 и локомотивный информационный дисплей 17.
Для электричек, например, для контроля целостности два навигационных устройства, расположенных на одном электропоезде, могут быть соединены проводной линией связи 10.
В качестве устройства регулирования скорости 11 может быть использована система автоматического ведения железнодорожного транспортного средства (автоведение). Система автоведения может быть выполнена, например, по патенту РФ №2273567.
В целях повышения безопасности движения и принятия экстренных мер информация о расстоянии между железнодорожными поездами может передаваться по каналу связи на диспетчерский пункт с последующим информированием машиниста о нарушении графика движения и/или автоматическим включением устройства регулирования скорости 11.
Данная система интервального регулирования движения железнодорожных поездов может быть реализована в варианте, когда информация на локомотив второго железнодорожного поезда поступает не с хвостового навигационного устройства, а с навигационного устройства, расположенного на локомотиве первого, впереди идущего поезда. Для этого передатчик 16 с антенной 8 должен находиться на локомотиве первого железнодорожного поезда. Вход передатчика 16 должен быть соединен с третьим выходом устройства обработки данных 2 локомотива первого железнодорожного поезда. Преимуществом данного варианта системы по сравнению с описанным выше является отсутствие съемного хвостового навигационного устройства, отсутствие необходимости проведения работ по зарядке и/или замене источников питания хвостового навигационного устройства, отсутствие фактов хищения или вандализма по отношению к навигационным приемникам, так как они находятся в кабине машиниста. К недостаткам данного варианта системы по сравнению с описанным выше можно отнести процедуру ручного ввода в устройство обработки данных 2 локомотива второго железнодорожного поезда фактической длины первого, впереди идущего железнодорожного поезда и увеличение мощности передатчика, так как расстояние линии связи 10 увеличивается на длину поезда.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ децентрализованного интервального регулирования движения поездов и система для его реализации | 2019 |
|
RU2722780C1 |
| Система децентрализованного интервального регулирования движения поездов | 2019 |
|
RU2725332C1 |
| Децентрализованная система интервального регулирования движения поездов с автоматизированным управлением | 2019 |
|
RU2724476C1 |
| СПОСОБ И СИСТЕМА ДЕЦЕНТРАЛИЗОВАННОГО ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ | 2021 |
|
RU2763015C1 |
| Способ интервального регулирования движения поездов | 2024 |
|
RU2832521C1 |
| Способ контроля состояния рельсовой линии и система интервального регулирования движения поездов на перегоне | 2021 |
|
RU2766015C1 |
| ХВОСТОВОЕ УСТРОЙСТВО КОНТРОЛЯ ЦЕЛОСТНОСТИ ПОЕЗДА | 2021 |
|
RU2764478C1 |
| Система интервального регулирования движения поездов | 2021 |
|
RU2753990C1 |
| СИСТЕМА ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ НА ПЕРЕГОНЕ | 2012 |
|
RU2513883C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПОЕЗДОВ С ПОМОЩЬЮ ИСКУССТВЕННЫХ СПУТНИКОВ ЗЕМЛИ | 1992 |
|
RU2092355C1 |

Изобретение относится к области железнодорожной автоматики для регулирования движения поездов. Система содержит установленный на локомотиве локомотивный навигационный приемник (3) с антенной (7), принимающий сигнал от спутниковой группировки (1), устройство (2) обработки, причем выход навигационного приемника (3) соединен с первым входом устройства (2) обработки, дополнительно введен приемник линии связи (4), приемная антенна (9), хвостовое навигационное устройство (5) с антеннами (6) и (8). Причем сигнал со спутниковой группировки (1) через антенну (6) поступает в хвостовое навигационное устройство (5), расположенное на хвостовом вагоне впереди идущего поезда, с которого обработанная необходимым образом информация через антенну (8) и по линии связи (10) поступает на вход приемной антенны (9), выход которой подключен ко второму входу устройства (2) обработки, в котором вычисляются координаты локомотива и хвостового вагона впереди идущего поезда с последующим определением расстояния между ними и на выходе которого формируется управляющая информация. Достигается повышение безопасности движения поездов. 2 н. и 4 з.п. ф-лы, 4 ил.
1. Способ децентрализованного интервального регулирования движения поездов, состоящий в том, что находящееся на локомотиве устройство обработки данных одновременно получает информацию как от локомотивного навигационного приемника поезда, так и от приемника радиосигнала, получающего сигнал по линии радиосвязи от навигационного устройства, расположенного на хвостовом вагоне впереди идущего поезда, при этом данные с хвостового навигационного устройства обрабатываются с учетом кривизны и профиля пути в устройстве обработке данных, которое вычисляет координаты локомотива и хвостового вагона впереди идущего поезда, определяет расстояние между ними и вырабатывает управляющие и/или информационные сигналы.
2. Система децентрализованного интервального регулирования движения поездов, содержащая установленный на локомотиве локомотивный навигационный приемник (3) с антенной (7), принимающий сигнал от спутниковой группировки (1), а также устройство (2) обработки, причем выход навигационного приемника 3 соединен с первым входом устройства 2 обработки, отличающаяся тем, что в систему вводятся приемник линии связи (4), приемная антенна (9), хвостовое навигационное устройство (5) с антеннами (6) и (8), причем сигнал со спутниковой группировки (1) через антенну (6) поступает в хвостовое навигационное устройство (5), расположенное на хвостовом вагоне впереди идущего поезда, с которого обработанная необходимым образом информация через антенну 8 и по линии связи (10) поступает на вход приемной антенны (9), выход которой подключен ко второму входу устройства (2) обработки, в котором вычисляются координаты локомотива и хвостового вагона впереди идущего поезда с последующим определением расстояния между ними и на выходе которого формируется управляющая информация.
3. Система по п. 2, отличающиеся тем, что в систему вводится информационный дисплей, вход которого подключен к выходу устройства обработки.
4. Система по п. 2, отличающиеся тем, что в систему вводится устройство регулирования скорости, вход которого подключен к выходу устройства обработки.
5. Система по п. 2 отличающаяся тем, что следующие данные: координаты локомотива и хвоста впереди идущего поезда, расстояние между ними, скорость поездов передаются с локомотива по каналу радиосвязи для последующего отображения в стационарный пункт: диспетчерский центр и/или помещение дежурного по станции.
6. Система по п. 5 отличающаяся тем, что с учетом переданных данных в стационарном пункте формируется и посылаются команды машинисту поезда и/или на устройство регулирования скорости этого поезда.
| Способ повышения порядка кодовых колец и устройство для осуществления этого способа | 1957 |
|
SU126303A1 |
| СИСТЕМА ДЛЯ КОНТРОЛЯ РАССТОЯНИЯ МЕЖДУ СЛЕДУЮЩИМИ ДРУГ ЗА ДРУГОМ ПОЕЗДАМИ НА ОСНОВЕ ЦИФРОВОЙ РАДИОСВЯЗИ | 2015 |
|
RU2578646C1 |
| CN 103144654 A, 12.06.2013 | |||
| CN 104260758 A, 07.01.2015 | |||
| KR 20160059654 A, 27.05.2016. | |||

