Изобретение относится к области моделирования и может быть использовано для определения зависимости эффективной площади рассеяния гиперзвуковой крылатой ракеты от времени.
В настоящее время для оценки эффективности зенитных ракетных комплексов (ЗРК) используются имитационные модели боевых действий, позволяющие исследовать процессы функционирования сложных систем с сохранением их логической структуры и последовательности чередования происходящих событий во времени. В свою очередь, эффективность ЗРК зависит от качества информации о противнике, получаемой от информационных средств, к которым прежде всего относятся радиолокационные станции и комплексы. При этом качество радиолокационной информации определяется вероятностью правильного обнаружения цели при фиксированном значении ложной тревоги, а также точностью определения ее координат и зависит от значения эффективной площади рассеяния (ЭПР) цели. В тоже время, в известных моделях боевых действий ЗРК процессы обнаружения воздушных целей, как правило, моделируются с использованием средних или медианных значений ЭПР в широком диапазоне ожидаемых ракурсов облучения цели. Такой подход позволяет решать задачи оценки эффективности группировок войск при ограничениях на вычислительные затраты, однако, снижает точность оценки дальности обнаружения целей, так как незначительное изменение ракурса облучения цели ведет к изменению ее ЭПР в десятки раз. Особенно это важно учитывать при моделировании процесса обнаружения перспективных гиперзвуковых целей, ракурс облучениях которых, в связи с высокой скоростью их полета (V=6-8 M), изменяется значительно быстрее, чем обычных средств воздушно-космического нападения, обуславливая непрерывное изменение ЭПР во времени.
В связи с вышеизложенным, целью настоящего изобретения является определение зависимости эффективной площади рассеяния гиперзвуковой крылатой ракеты от времени.
Известен способ моделирования радиолокационных сигналов, отраженных от космических объектов на внеатмосферном участке полета [Моделирование в радиолокации / А.И. Леонов, В.Н. Васенев, Ю.И. Гайдуков и др.; Под ред. А.И. Леонова. - М.: Сов. радио, 1979, рис. 4.4, с. 99], позволяющий определить эффективную площадь рассеяния только для космического объекта на баллистическом участке его полета.
Наиболее близким техническим решением, принятым за прототип, является способ моделирования динамических характеристик рассеяния с использованием статических радиолокационных характеристик [Радиолокационные характеристики летательных аппаратов / М.Е. Варганов, Ю.С. Зиновьев, Л.Ю. Астанин и др.; Под ред. Л.Т. Тучкова. - М.: Радио и связь, 1985, рис. 9.1, с. 174], который заключается в следующем.
Экспериментально измеряется или аналитически рассчитывается диаграмма обратного отражения радиолокационного сигнала от цели σ(θц) и моделируется движение цели относительно РЛС обнаружения для получения ракурса ее облучения в различных точках траектории полета:

где ϕn, Δn, γn - углы ориентации цели относительно линии визирования РЛС (ϕn - угол нутации, λn - угол прецессии и γn - угол собственного вращения).
При этом углы ориентации рассчитываются с использованием элементов матрицы М направляющих косинусов между связанной и визирной системами координат [Радиолокационные характеристики летательных аппаратов / М.Е. Варганов, Ю.С. Зиновьев, Л.Ю. Астанин и др.; Под ред. Л.Т. Тучкова. - М.: Радио и связь, 1985, с. 189]:

где С - матрица перехода от топоцентрической к визирной системе координат, Dp - матрица перехода от топоцентрической системы координат к абсолютной, А - матрица перехода от абсолютной к орбитальной системе координат, В - матрица направляющих косинусов между связанной и орбитальной системами координат.
Элементы матриц А и В получают путем расчета составляющих кеплеровой орбиты и текущих параметров движения летательного аппарата (ЛА) в геоцентрической абсолютной системе координат. Однако, траекторию полета гиперзвуковой крылатой ракеты нельзя описать кеплеровыми зависимостями, в связи с чем применение известного способа не позволяет достичь поставленной цели.
Техническим результатом изобретения является создание способа определения динамической эффективной площади рассеяния гиперзвуковой крылатой ракеты.
Достижение заявленного технического результата и поставленной цели обеспечивается тем, что в способ определения динамической эффективной площади рассеяния гиперзвуковой крылатой ракеты, заключающийся в том, что в текущий момент времени рассчитываются значения углов нутации, прецессии и собственного вращения, характеризующие ориентацию цели относительно линии визирования радиолокационной станции обнаружения, в зависимости от которых определяется значение эффективной площади рассеяния гиперзвуковой крылатой ракеты, дополнительно включены следующие этапы: задание исходных данных для моделирования, расчет координат центра масс ГЗКР в геоцентрической сферической системе координат, расчет элементов матрицы направляющих косинусов между местной географической системой координат и геоцентрической гринвичской прямоугольной системой, расчет элементов матрицы направляющих косинусов между полускоростной системой координат и местной географической системой координат, расчет элементов матрицы направляющих косинусов между полускоростной системой координат и связанной системой координат, пересчет координат радиолокационной станции обнаружения из геоцентрической гринвичской прямоугольной в геодезическую систему координат, расчет элементов матрицы направляющих косинусов между геоцентрической гринвичской прямоугольной системой координат и топоцентрической (измерительной) системой, расчет координат центра масс гиперзвуковой крылатой ракеты в топоцентрической (измерительной) системе координат радиолокационной станции, вычисление элементов матрицы перехода от топоцентрической (измерительной) системы координат к визирной, расчет матрицы направляющих косинусов между связанной и визирной системами координат путем умножения транспонированной матрицы перехода от топоцентрической системы координат к визирной, матрицы направляющих косинусов между геоцентрической гринвичской прямоугольной системой координат и топоцентрической (измерительной) системой, транспонированной матрицы направляющих косинусов между местной географической системой координат и геоцентрической гринвичской, прямоугольной системой, транспонированной матрицы направляющих косинусов между полускоростной системой координат и местной географической системой координат, транспонированной матрицы направляющих косинусов между полускоростной системой координат и связанной системой координат.
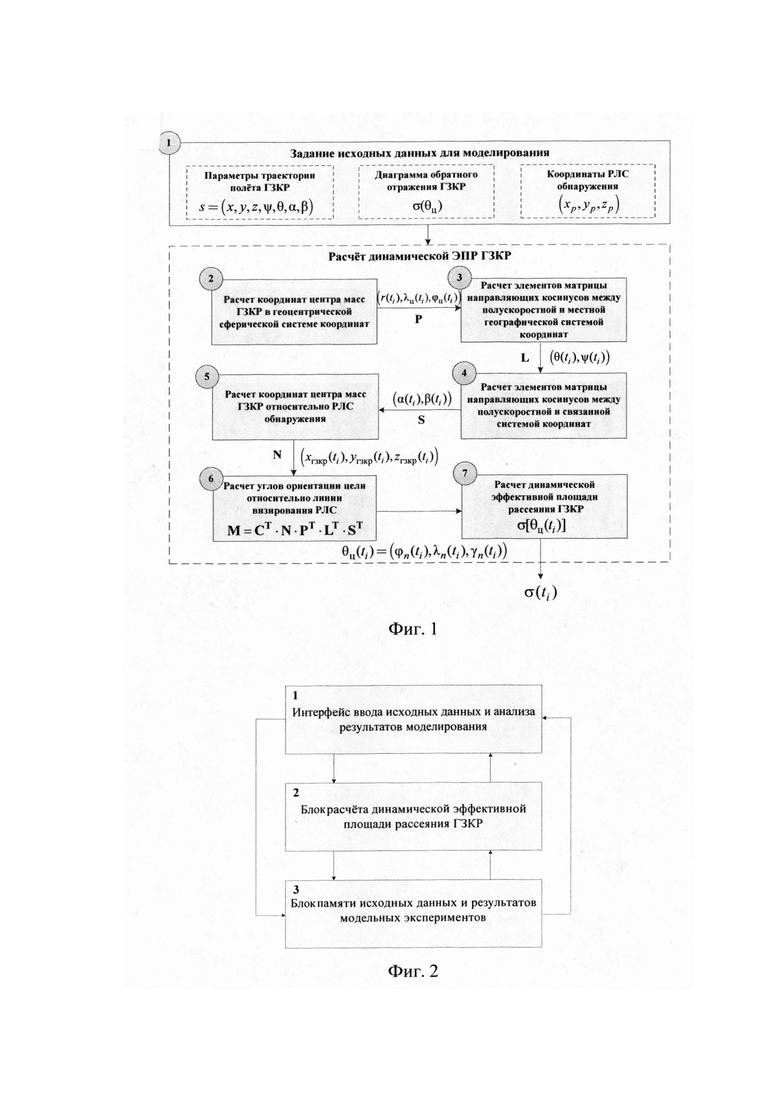
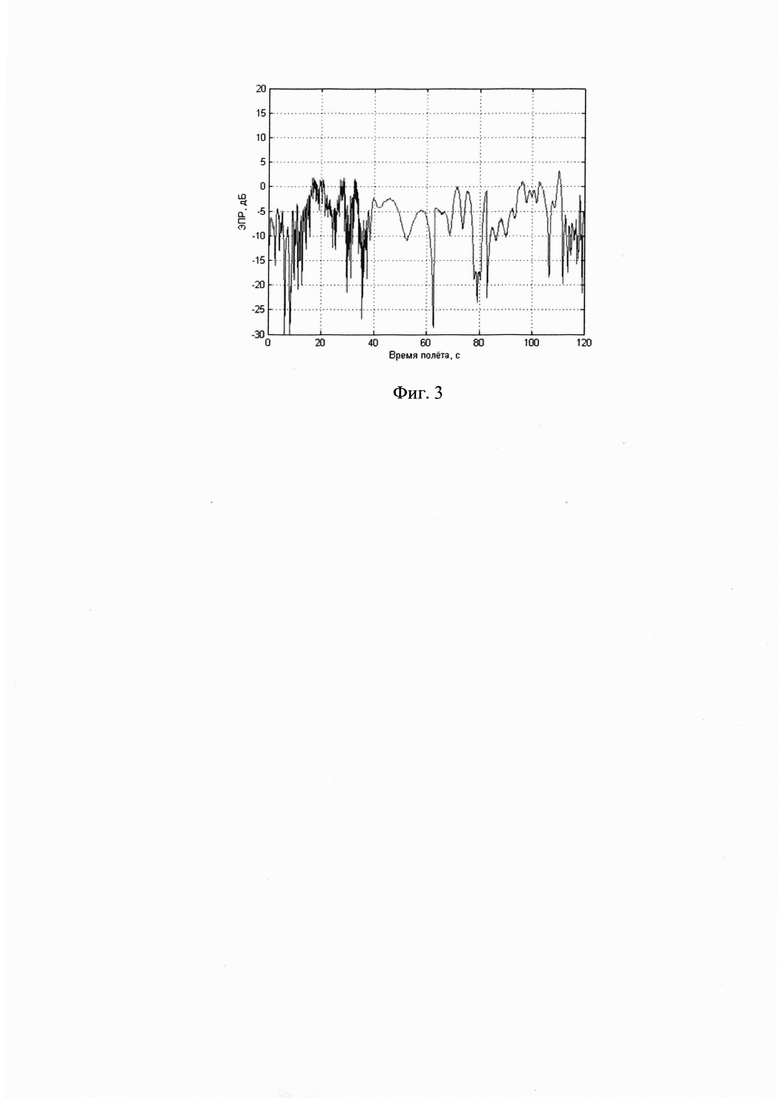
Сущность изобретения поясняется рисунками, представленными на фиг. 1-3. На фиг. 1 представлена структурная схема способа определения динамической эффективной площади рассеяния гиперзвуковой крылатой ракеты; на фиг. 2 - устройство, реализующее способ определения динамической эффективной площади рассеяния гиперзвуковой крылатой ракеты; на фиг. 3 - зависимость ЭПР гиперзвуковой крылатой ракеты от времени.
Способ определения динамической эффективной площади рассеяния гиперзвуковой крылатой ракеты (фиг. 1) заключается в следующем:
1) на первом этапе способа задают исходные данные для моделирования:
- параметры траектории полета ГЗКР: множество координат, определяющих пространственную ориентацию ГЗКР в каждый момент времени ее полета ti с заданной дискретностью 
- параметры траектории полета ГЗКР: множество координат, определяющих пространственную ориентацию ГЗКР в каждый момент времени ее полета ti с заданной дискретностью 
- диаграмма обратного отражения радиолокационного сигнала от цели σ(θц);
- координаты РЛС обнаружения xp, yp, zp;
2) на втором этапе способа по полученным в момент времени ti координатам центра масс ГЗКР х, у, z в геоцентрической гринвичской прямоугольной системе координат осуществляется расчет координат центра масс в геоцентрической сферической системе координат - радиуса r, углов λц и ϕц (геоцентрические долгота и широта), Определяющих взаимную ориентацию осей геоцентрической гринвичской прямоугольной Oxyz и местной географической систем координат Cxcyczc:



Затем рассчитываются элементы матрицы Р направляющих косинусов между местной географической системой координат и геоцентрической гринвичской прямоугольной системой:

3) на третьем этапе способа по полученным в момент времени ti значениям углов наклона траектории θ и поворота траектории ψ рассчитываются элементы матрицы L направляющих косинусов между полускоростной системой координат и местной географической системой координат:

4) на четвертом этапе способа по полученным в момент времени ti значениям углов атаки α и скольжения β рассчитываются элементы матрицы S направляющих косинусов между полускоростной системой координат и связанной системой координат:

5) на пятом этапе способа для расчета координат центра масс ГЗКР относительно РЛС обнаружения осуществляется пересчет координат РЛС обнаружения из геоцентрической гринвичской прямоугольной в геодезическую систему координат. Для этого используются следующие выражения:







После этого рассчитываются элементы матрицы N направляющих косинусов между геоцентрической гринвичской прямоугольной системой координат и топоцентрической (измерительной) системой:

Далее в соответствии с заданными в исходных данных координатами РЛС и полученными в момент времени ti координатами центра масс ГЗКР рассчитываются координаты центра масс ГЗКР в топоцентрической (измерительной) системе координат РЛС, сначала в прямоугольной:
а затем - в сферической:



где dгзкр - наклонная дальность до цели, εгзкр - угол места цели, βгзкр - азимут цели;
6) на шестом этапе способа производится расчет углов ориентации ГЗКР относительно линии визирования РЛС - углов нутации ϕn, прецессии λn и собственного вращения γn в момент времени ti.
Для этого вычисляются элементы матрицы С перехода от топоцентрической (измерительной) системы координат к визирной:
Для этого вычисляются элементы матрицы С перехода от топоцентрической системы координат к визирной:
где 
Далее рассчитываются значения углов ϕn, λn и γn на момент времени ti. Для этого осуществляется расчет матрицы направляющих косинусов между связанной и визирной системой координат (матрицы М), при этом выражение (2) преобразуется к виду:

Элементы матрицы М используются для расчета искомых углов:



где m11, m12, m21 - соответствующие элементы матрицы М;
7) на седьмом этапе способа определяется значение динамической эффективной площади рассеяния ГЗКР на момент времени ti в соответствии с рассчитанным на предыдущем этапе ракурсом облучения ГЗКР  и заданной в исходных данных диаграммой обратного отражения цели
и заданной в исходных данных диаграммой обратного отражения цели 
Устройство (фиг. 2), реализующее способ определения динамической эффективной площади рассеяния гиперзвуковой крылатой ракеты, содержит соединенные между собой цифровыми линиями связи интерфейс 1 ввода исходных данных и анализа результатов моделирования, блок 2 расчета динамической эффективной площади рассеяния ГЗКР, блок 3 памяти исходных данных и результатов моделирования.
Интерфейс 1 ввода исходных данных и анализа результатов моделирования выполнен на базе ПЭВМ и содержит процессор, оперативное запоминающее устройство (ОЗУ), перепрограммируемое запоминающее устройство, вводно-выводное устройство (ВВУ) и дисплей. Интерфейс 1 ввода исходных данных и анализа результатов моделирования соединен по сигналам коммутации с блоком 2 расчета динамической эффективной площади рассеяния ГЗКР и блоком 3 памяти исходных данных и результатов модельных экспериментов.
Блок 2 расчета динамической эффективной площади рассеяния ГЗКР выполнен в виде программно-технического модуля на плате расширения ПЭВМ. Блок 2 расчета динамической эффективной площади рассеяния ГЗКР соединен по сигналам коммутации с интерфейсом 1 ввода исходных данных и анализа результатов моделирования и блоком 3 памяти.
Блок 3 памяти исходных данных и результатов модельных экспериментов содержит в цифровой форме наборы данных: по параметрам траектории полета ГЗКР, диаграмме обратного отражения цели, координатам РЛС обнаружения; и соединен по сигналам коммутации с интерфейсом 1 ввода исходных данных и анализа результатов моделирования, блоком 2 расчета динамической эффективной площади рассеяния ГЗКР.
Устройство функционирует следующим образом. С помощью интерфейса 1 ввода исходных данных и анализа результатов моделирования пользователем осуществляется задание исходных данных для моделирования, их запись в блок 3 памяти исходных данных и результатов моделирования и запуск моделирования. Далее в блоке 2 расчета динамической эффективной площади рассеяния ГЗКР осуществляются расчеты согласно этапов 2-7 способа. Затем результаты расчетов выводятся на дисплей интерфейса 1 ввода исходных данных и анализа результатов моделирования.
Таким образом, предложенный способ позволяет определить зависимость эффективной площади рассеяния гиперзвуковой крылатой ракеты от времени, что подтверждается расчетами, проведенными с помощью устройства. Результаты расчетов для конечного участка траектории полета (время полета 120 с) представлены на фиг. 3.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ оценки эффективности информационных средств ЗРК (ЗРС) при обнаружении ГЗКР и устройство, его реализующее | 2019 |
|
RU2708122C1 |
| Способ управления беспилотным планирующим летательным аппаратом | 2017 |
|
RU2654238C1 |
| РАДИОЛОКАЦИОННАЯ СИСТЕМА ЦЕЛЕУКАЗАНИЯ | 2005 |
|
RU2311659C2 |
| Система обработки радиолокационной информации | 2016 |
|
RU2648257C1 |
| Способ сопровождения крылатой ракеты при огибании рельефа местности в различных тактических ситуациях | 2021 |
|
RU2760951C1 |
| СПОСОБ РАСПОЗНАВАНИЯ БАЛЛИСТИЧЕСКОЙ ЦЕЛИ С ИСПОЛЬЗОВАНИЕМ ОЦЕНОК ПЕРВОГО И ВТОРОГО ПРИРАЩЕНИЙ РАДИАЛЬНОЙ СКОРОСТИ | 2022 |
|
RU2793774C1 |
| СПОСОБ ЗАЩИТЫ РАДИОЛОКАЦИОННОЙ СТАНЦИИ ОТ ПРОТИВОРАДИОЛОКАЦИОННОЙ РАКЕТЫ НА ОСНОВЕ ИСПОЛЬЗОВАНИЯ ПЕРЕИЗЛУЧАЮЩЕГО ЭКРАНА | 2001 |
|
RU2210089C2 |
| Способ определения географических координат источников радиоизлучения в многоцелевой обстановке | 2021 |
|
RU2773307C1 |
| УСТРОЙСТВО РАСПОЗНАВАНИЯ НЕМАНЕВРИРУЮЩЕЙ БАЛЛИСТИЧЕСКОЙ ЦЕЛИ ПО ФИКСИРОВАННОЙ ВЫБОРКЕ КВАДРАТОВ ДАЛЬНОСТИ | 2016 |
|
RU2626015C1 |
| ОБЗОРНО-ПРИЦЕЛЬНАЯ СИСТЕМА ЛЕТАТЕЛЬНОГО АППАРАТА | 2009 |
|
RU2391262C1 |
Изобретение относится к способу определения динамической эффективной площади рассеяния гиперзвуковой крылатой ракеты. Технический результат заключается в повышении точности определения динамической эффективной площади рассеяния гиперзвуковой крылатой ракеты. Способ, при котором рассчитываются значения углов нутации, прецессии и собственного вращения, характеризующие ориентацию цели относительно линии визирования радиолокационной станции обнаружения, в зависимости от которых определяется значение эффективной площади рассеяния гиперзвуковой крылатой ракеты, задают исходные данные для моделирования, осуществляется расчет координат центра масс ГЗКР, рассчитываются элементы матрицы направляющих косинусов, осуществляется пересчет координат радиолокационной станции обнаружения, осуществляется расчет матрицы направляющих косинусов между связанной и визирной системами координат. 3 ил.
Способ определения динамической эффективной площади рассеяния гиперзвуковой крылатой ракеты, заключающийся в том, что в текущий момент времени рассчитываются значения углов нутации, прецессии и собственного вращения, характеризующие ориентацию цели относительно линии визирования радиолокационной станции обнаружения, в зависимости от которых определяется значение эффективной площади рассеяния гиперзвуковой крылатой ракеты, отличающийся от существующих тем, что задают исходные данные для моделирования, осуществляется расчет координат центра масс ГЗКР в геоцентрической сферической системе координат, рассчитываются элементы матрицы направляющих косинусов между местной географической системой координат и геоцентрической гринвичской прямоугольной системой, рассчитываются элементы матрицы направляющих косинусов между полускоростной системой координат и местной географической системой координат, рассчитываются элементы матрицы направляющих косинусов между полускоростной системой координат и связанной системой координат, осуществляется пересчет координат радиолокационной станции обнаружения из геоцентрической гринвичской прямоугольной в геодезическую систему координат, рассчитываются элементы матрицы направляющих косинусов между геоцентрической гринвичской прямоугольной системой координат и топоцентрической (измерительной) системой, рассчитываются координаты центра масс гиперзвуковой крылатой ракеты в топоцентрической (измерительной) системе координат радиолокационной станции обнаружения, вычисляются элементы матрицы перехода от топоцентрической (измерительной) системы координат к визирной, осуществляется расчет матрицы направляющих косинусов между связанной и визирной системами координат путем умножения транспонированной матрицы перехода от топоцентрической (измерительной) системы координат к визирной, матрицы направляющих косинусов между геоцентрической гринвичской прямоугольной системой координат и топоцентрической системой, транспонированной матрицы направляющих косинусов между местной географической системой координат и геоцентрической гринвичской прямоугольной системой, транспонированной матрицы направляющих косинусов между полускоростной системой координат и местной географической системой координат, транспонированной матрицы направляющих косинусов между полускоростной системой координат и связанной системой координат.
| СПОСОБ ОЦЕНКИ ХАРАКТЕРИСТИК РАДИОЛОКАЦИОННОЙ СТАНЦИИ ПРИ ДЕЙСТВИИ АКТИВНЫХ ШУМОВЫХ ПОМЕХ | 2000 |
|
RU2193782C2 |
| Способ определения местоположения источника радиоизлучения с периодической структурой сигнала и вращающейся направленной антенной | 2017 |
|
RU2670976C9 |
| US 6161434 A1, 19.12.2000 | |||
| БЕСПИЛОТНЫЙ АВИАЦИОННЫЙ РАКЕТНЫЙ КОМПЛЕКС И СПОСОБ ЕГО ПРИМЕНЕНИЯ | 2018 |
|
RU2690142C1 |

