Изобретение относится к области моделирования и может быть использовано для количественной оценки эффективности информационных средств ЗРК (ЗРС) в условиях применения противником гиперзвуковых крылатых ракет (ГЗКР).
В настоящее время при принятии решений на выбор оптимальных тактико-технических характеристик перспективных информационных средств важнейшим этапом является оценка эффективности при сравнении альтернативных вариантов.
При этом создана обширная научно-методическая база для проведения подобных исследований, согласно которой оценка эффективности как отдельных образцов вооружений, так и группировок ЗРВ, проводится с использованием комплекса аналитических и имитационных моделей, позволяющих оценить эффективность ЗРК (ЗРС) для различных вариантов налета СВН и состава группировки ЗРВ по различным интегральным и частным показателям эффективности. Одним из таких показателей являются реализуемые зоны обнаружения аэродинамических и баллистических целей радиоэлектронными средствами ЗРК (ЗРС) [Военная кибернетика: методология обоснования направлений развития зенитного ракетного вооружения и синтеза зенитных ракетных систем. Под ред. А.С. Сумина, Ю.И. Арепина. - М.: ВИМИ, 1997. - 399 с.].
Известен способ определения эффективности многопозиционной гидроакустической системы [RU 2611556, публ. 28.02.2017], предназначенный для оценки эффективности многопозиционной активно-пассивной гидроакустической системы наблюдения.
Недостатком данного способа является невозможность его применения для количественной оценки эффективности информационных средств ЗРК (ЗРС) при обнаружении гиперзвуковых крылатых ракет.
Наиболее близким технически решением, принятым за прототип, является известный способ расчета зоны обнаружения [Мищенко Ю.А. Зоны обнаружения. - М.: Воениздат, 1963. - 96 с.], который заключается в следующем.
Самолет, зона обнаружения которого должна быть построена, выполняет специальный полет; его истинная высота измеряется и фиксируется на борту самолета с высокой точностью. Дальность обнаружения Д1=Дц определяется оператором непосредственно по шкале индикатора с прямой разверткой или из вспомогательного графика при использовании индикатора кругового обзора. Угол места ε1 находят графически на координатной сетке крупного масштаба, используя величину истинной высоты полета Н1 и полученную дальность обнаружения Д1. Если такой сеткой не располагают, то угол места в градусах рассчитывается по формуле:

Зная угол наклона максимума излучения α1м и угол места ε1 находят угол θ1 и числовое значение нормированной диаграммы направленности ƒ(θ1). Подставляя полученные значения Д1 и ƒ(θ1) в формулу (2), вычисляют максимальную дальность обнаружения Дmax.

Получив максимальную дальность продолжают расчет зоны обнаружения. Задаваясь последовательно различными углами места ε, по формуле (3) определяют θ и находят соответствующие им значения диаграммы направленности ƒ(θ).

Далее, используя формулу (4), вычисляют расстояния Д для заданных углов ε. Эти данные наносят на координатную сетку и строят замкнутую кривую, которая ограничивает зону обнаружения.

Недостатками данного способа являются:
- необходимость проведения летного эксперимента в реальных условиях для оценки дальности обнаружения, организация и проведение которого требует значительных временных, материальных и трудовых затрат, кроме того необходимо наличие летательного аппарата, имитирующего полет ГЗКР;
- при расчете зоны обнаружения предполагают эффективные поверхности рассеяния (ЭПР) цели под различными углами места ε приблизительно одинаковы и равны ЭПР цели под углом места ε1.
Но при полете цели в реальных условиях, ее центр масс перемещается относительно РЛС обнаружения и изменяется ее ориентация относительно линии визирования. В результате этого рассеивающие свойства цели непрерывно меняются. Для описания динамики изменения рассеивающей способности цели может быть использовано понятие динамической ЭПР, которая представляет собой зависимость ЭПР цели от времени [Радиолокационные характеристики летательных аппаратов / М.Е. Варганов, Ю.С. Зиновьев, Л.Ю. Астанин и др.; Под ред. Л.Т. Тучкова. - М.: Радио и связь, 1985. - 236 с.].
В связи с вышеизложенным, целью настоящего изобретения является обеспечение возможности учета динамической ЭПР ГЗКР при расчете зоны обнаружения информационных средств ЗРК (ЗРС).
Техническим результатом изобретения является создание способа оценки эффективности информационных средств ЗРК (ЗРС) при обнаружении ГЗКР с учетом динамической ЭПР цели.
Сущность изобретения поясняется рисунками, представленными на фиг. 1-10.
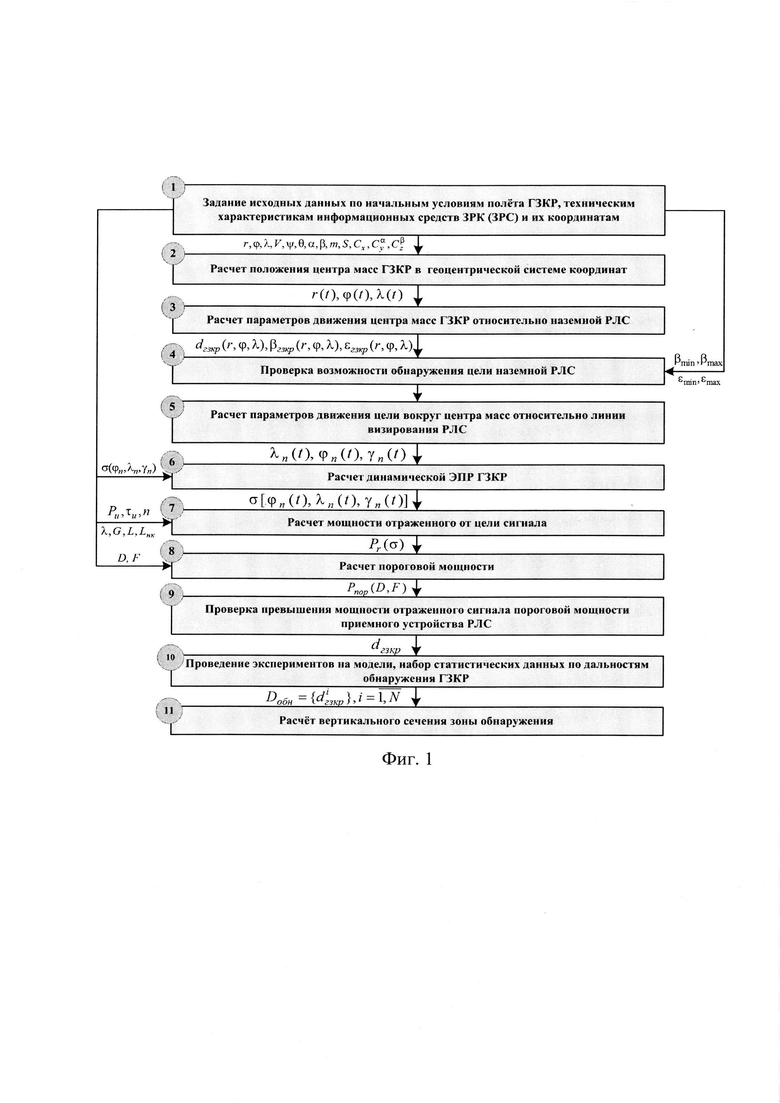
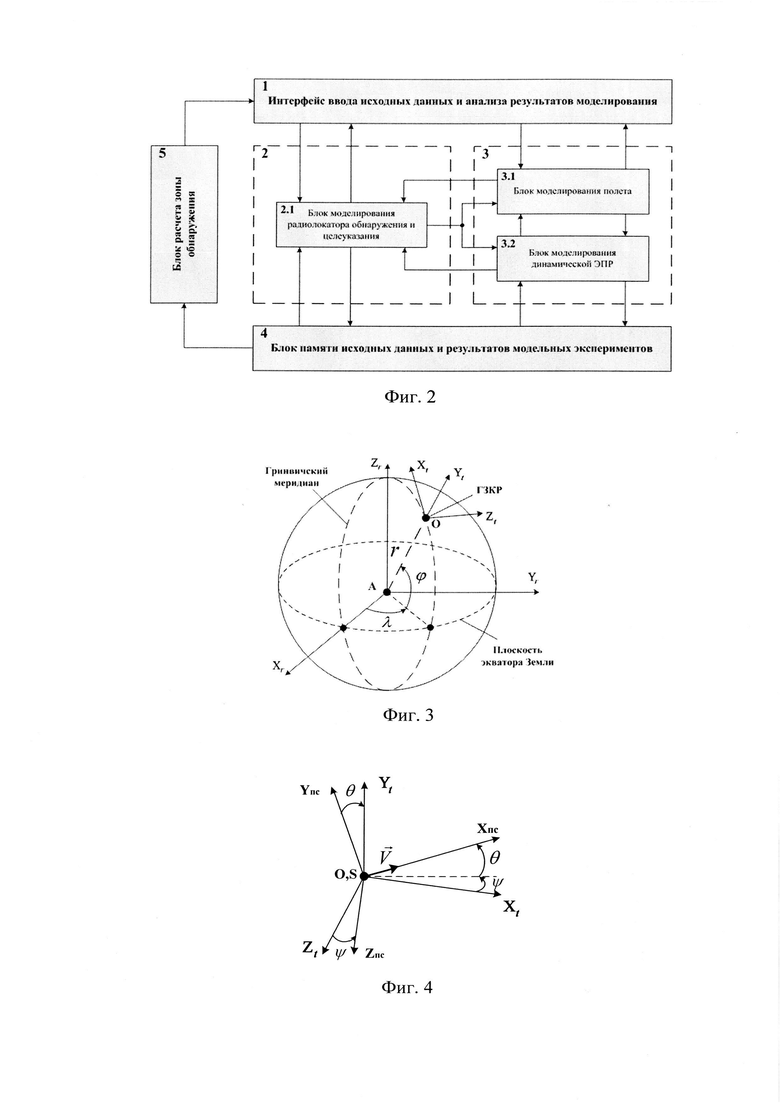
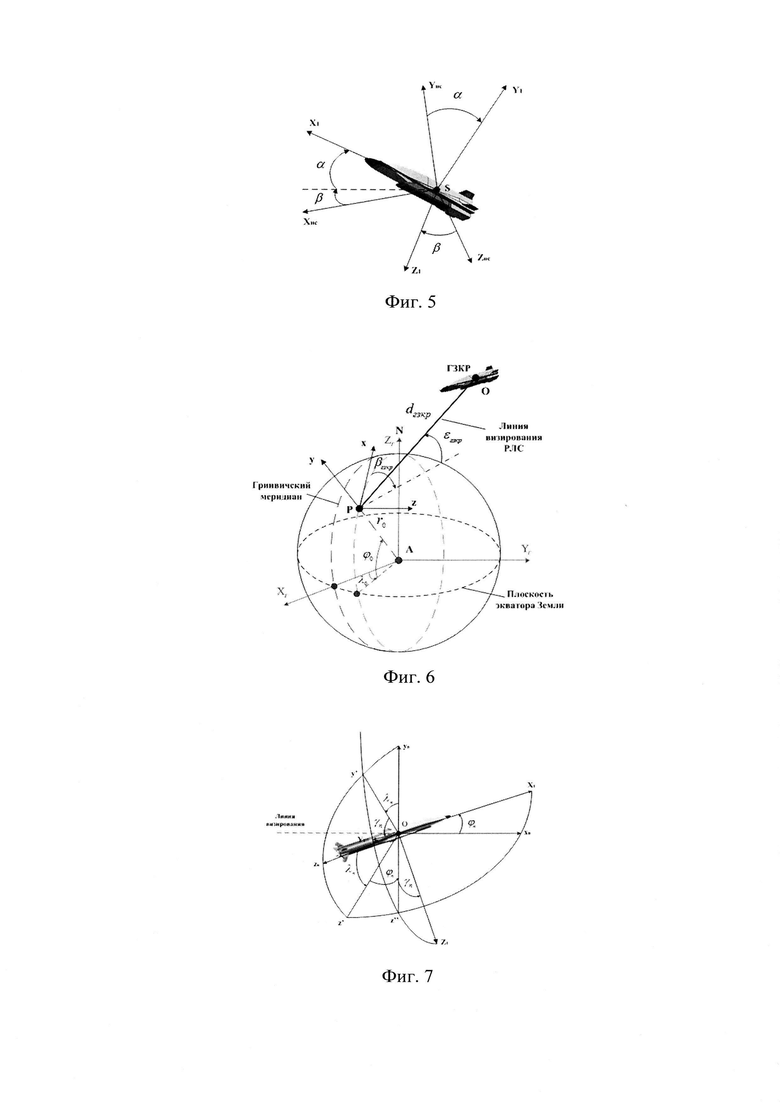
На фиг. 1 представлена структурная схема способа оценки эффективности информационных средств ЗРК (ЗРС) при обнаружении ГЗКР с учетом динамической ЭПР цели; на фиг. 2 - устройство, реализующее данный способ; на фиг. 3 - взаимная ориентация геоцентрической и местной географической систем координат; на фиг. 4 - взаимная ориентация местной географической и полускоростной систем координат; на фиг. 5 - взаимная ориентация полускоростной и связанной систем координат; на фиг. 6 - топоцентрическая (измерительная) система координат; на фиг. 7 - взаимная ориентация визирной и связанной систем координат; на фиг. 8 - дальности обнаружения ГЗКР при заданном угле места цели; на фиг. 9 - дальности и высоты обнаружения при различных углах места цели; на фиг. 10 - вертикальное сечение зоны обнаружения.
Устройство, реализующее способ оценки эффективности информационных средств ЗРК (ЗРС) при обнаружении ГЗКР с учетом динамической ЭПР цели содержит соединенные между собой цифровыми линиями связи интерфейс 1 ввода исходных данных и анализа результатов моделирования, модель 2 ЗРК (ЗРС), модель 3 ГЗКР, блок 4 памяти исходных данных и результатов моделирования, блок 5 расчета зоны обнаружения.
Интерфейс 1 ввода исходных данных и анализа результатов моделирования выполнен на базе персональной ЭВМ с оконным интерфейсом стандарта Windows и содержит процессор, оперативное запоминающее устройство (ОЗУ), перепрограммируемое запоминающее устройство, вводно-выводное устройство (ВВУ) и дисплей. Программы выполнены с возможностью поочередного вывода графических данных или выборочно в соответствии с потребностями исследователя. Вызов необходимых параметров осуществляется по вызову соответствующих кнопок интерфейса.
В состав модели 2 ЗРК (ЗРС) входит блок 2.1 моделирования радиолокатора обнаружения, соединенный по сигналам управления и коммутации с блоком 3.2 моделирования полета ГЗКР, блоком 3.1 моделирования динамической эффективной поверхности рассеяния ГЗКР, интерфейсом 1 ввода исходных данных и анализа результатов моделирования, блоком 4 памяти исходных данных и результатов моделирования.
В состав модели 3 ГЗКР входит блок 3.1 моделирования динамической эффективной поверхности рассеяния ГЗКР, блок 3.2 моделирования полета ГЗКР, установленные на общей шине сопряжения и соединенные по сигналам управления и коммутации с блоком 2.1 моделирования радиолокатора обнаружения и целеуказания, интерфейсом 1 ввода исходных данных и анализа результатов моделирования, блоком 4 памяти исходных данных и результатов моделирования.
Блок 4 памяти содержит в цифровой форме наборы данных: по тактико-техническим характеристикам радиолокационных средств ЗРК (ЗРС) и ГЗКР, диаграммам обратного отражения ГЗКР и соединен по сигналам коммутации с интерфейсом 1 ввода исходных данных и анализа результатов моделирования, моделью 2 ЗРК (ЗРС) и моделью 3 ГЗКР.
Блок 5 расчета зоны обнаружения соединен по сигналам коммутации с интерфейсом 1 ввода исходных данных и анализа результатов моделирования и блоком 4 памяти исходных данных и результатов моделирования.
Сущность способа оценки эффективности информационных средств ЗРК (ЗРС) при обнаружении гиперзвуковой крылатой ракеты и функционирование устройства, реализующего данный способ заключается в следующем.
На первом этапе способа пользователем осуществляется задание исходных данных для моделирования с помощью интерфейса 1 ввода исходных данных и анализа результатов моделирования и их запись в блок 4 памяти исходных данных и результатов моделирования:
- положение центра масс ГЗКР в геоцентрической системе координат (r,λ,ϕ), скорость полета ГЗКР (V) и ориентация вектора скорости относительно местной географической системы координат (углы ψ и θ), ориентация ГЗКР относительно полускоростной системы координат (углы α и β), масса ГЗКР (m) и площадь миделевого сечения ГЗКР (S),  - аэродинамические коэффициенты, диаграмма обратного рассеяния ГЗКР σ(ϕn,λn,γn);
- аэродинамические коэффициенты, диаграмма обратного рассеяния ГЗКР σ(ϕn,λn,γn);
- координаты объекта удара (точечная цель) в геоцентрической системе координат (rц,λц,ϕц) и направление линии пикирования на цель (углы ψц и θц);
- координаты наземной РЛС обнаружения в геоцентрической системе координат (r0,ϕ0,λ0), высота антенны РЛС (h), темп обзора пространства (T), границы сектора обзора по углу места (εmin,εmax) и азимуту (βmin,βmax), длительность зондирующего сигнала (τи), количество импульсов в пачке (n), коэффициент шума приемника (kШ), импульсная мощность передатчика (Ри), длина волны (λ), коэффициент усиления антенны (G), вероятность ложных тревог (F), вероятность правильного обнаружения (Р), потери в связи с неоптимальностью приема (L), потери на некогерентное накопление (Lнк).
- условия полета: угловая скорость вращения Земли (ωз) gr и gω - проекции ускорения силы притяжения Земли на радиус-вектор  и вектор
и вектор  (gr,gω), плотность атмосферы (ρ), коэффициент сжатия Земли
(gr,gω), плотность атмосферы (ρ), коэффициент сжатия Земли  эффективный радиус Земли (Rэ).
эффективный радиус Земли (Rэ).
На втором этапе способа осуществляется расчет положения центра масс ГЗКР в геоцентрической системе координат по методу требуемых ускорений [Системы управления летательными аппаратами (баллистическими ракетами и их головными частями): Учебник для вузов / Г.Н. Разоренов, Э.А. Бахрамов, Ю.Ф. Титов; Под ред. Г.Н. Разоренова. М.: Машиностроение, 2003. - 584 с.]. Для этого из блока памяти 4 в блок 3.1 моделирования полета модели 3 ГЗКР поступают координаты начального положения центра масс ГЗКР:
- радиус r, углы λ и ϕ (геоцентрические долгота и широта), определяющие взаимную ориентацию осей геоцентрической гринвичской прямоугольной AXГYГZГ и местной географической системы координат OXtYtZt (фиг. 3).
- модуль скорости V и углы ψ и θ (угол поворота траектории и угол наклона траектории), определяющие взаимную ориентацию осей местной географической и полускоростной SXПСYПСZПС системы координат (фиг. 4).
- углы атаки α и скольжения β, определяющие взаимную ориентацию осей полускоростной и связанной системы координат SX1Y1Zl (фиг. 5).
Расчет траектории полета ГЗКР в блоке 3.1 моделирования полета осуществляется путем интегрирования с заданным постоянным шагом по времени dt системы дифференциальных уравнений:






Составляющие полной аэродинамической силы в проекциях на оси полускоростной системы координат (X,Y,Z) рассчитываются по формулам:



Параметры управления определяются следующими выражениями:














На третьем этапе способа в блоке 3.1 моделирования полета осуществляется расчет параметров движения центра масс ГЗКР относительно наземной РЛС обнаружения. Для этого, на каждом шаге моделирования осуществляется пересчет координат r, λ и ϕ в геоцентрическую гринвичскую прямоугольную систему координат:



Затем рассчитываются координаты центра масс ГЗКР в топоцентрической (измерительной) системе координат РЛС (фиг. 6), сначала в прямоугольной по формулам (31-34), потом в сферической по формулам (35-37):







Координаты РЛС в геоцентрической гринвичской прямоугольной системе координат (Xрлс,Yрлс,Zрлс) рассчитываются аналогично формулам (28-30) в соответствии с координатами r0,ϕ0,λ0, которые поступают в блок 3.1 моделирования полета из блока 4 памяти.
На четвертом этапе способа в блоке 3.1 моделирования полета по координатам ГЗКР в топоцентрической сферической системе dгзкр, εгзкр, βгзкр проверяется возможность обнаружения цели РЛС.
Для этого рассчитывается дальность прямой видимости цели:


Далее проверяются условия (40-42) для определения возможности обнаружения ГЗКР наземной РЛС:



Границы сектора обзора РЛС по углу места и азимуту (εmin, εmax, βmin, βmax), поступают в блок 3.1 из блока 4 памяти.
При выполнении условий (40-42) текущие координаты ГЗКР dгзкр,x,у,α,β,θ,ψ,ϕ,λ и координаты РЛС В0, L0 поступают в блок 3.2 моделирования динамической ЭПР, в противном случае осуществляется расчет следующего положения центра масс ГЗКР (возврат ко второму этапу способа).
На пятом этапе способа в блоке 3.2 моделирования динамической ЭПР производится расчет параметров движения цели вокруг центра масс относительно РЛС и ее линии визирования - углов нутации ϕn(t), прецессии λn(t) и собственного вращения γn(t) (фиг. 7).
Для этого рассчитывается матрица направляющих косинусов между связанной и визирной системами координат:

В которой S - матрица перехода от полускоростной системы координат к связанной:

L - матрица перехода от местной географической системы координат к полускоростной [Лебедев А.А., Чернобровкин Л.С. Динамика полета беспилотных летательных аппаратов. Учебное пособие для вузов. Изд. 2-е, переработанное и доп. - М.: «Машиностроение», 1973. - 616 с.]:

Р - матрица перехода от местной географической системы к геоцентрической гринвичской прямоугольной системе координат [Военная кибернетика: методология обоснования направлений развития зенитного ракетного вооружения и синтеза зенитных ракетных систем. Под ред. А.С. Сумина, Ю.И. Арепина. - М.: ВИМИ, 1997. - 399 с.]:

N - матрица перехода от геоцентрической гринвичской прямоугольной системы координат к топоцентрической системе [Основы теории полета космических аппаратов. Под ред. д-ра физ.-мат. наук Г.С. Нариманова и д-ра техн. наук М.К. Тихонравова. - М.: «Машиностроение», 1972. - 608 с.]:

С - матрица перехода от топоцентрической системы координат к визирной [Радиолокационные характеристики летательных аппаратов / М.Е. Варганов, Ю.С. Зиновьев, Л.Ю. Астанин и др.; Под ред. Л.Т. Тучкова. - М.: Радио и связь, 1985. - 236 с.]:

Углы ϕn, λn и γn рассчитываются из матрицы М:



где m11, m12, m21 - соответствующие элементы матрицы М.
На шестом этапе способа в соответствии с полученными углами ϕn, λn, γn и заданной в исходных данных диаграммой обратного рассеяния ГЗКР σ(ϕn,λn,γn) рассчитывается значение эффективной поверхности рассеяния ГЗКР на текущем шаге по времени в зависимости от ориентации цели относительно линии визирования РЛС σ[ϕn(t),λn(t),γn(t)] (динамическая ЭПР).
На седьмом этапе способа текущее значение ЭПР ГЗКР σ[ϕn(t),λn(t),γn(t)] передается из блока 3.2 расчета динамической ЭПР в блок 2.1 моделирования РЛС обнаружения и целеуказаний. Кроме того, из блока 4 памяти в блок 2.1 поступают технические характеристики РЛС обнаружения h, Т, τи, n, kШ, Ри, λ, G, L, Lнк и требуемые показатели качества обнаружения P и F.
В блоке 2.1 производится расчет мощности отраженного от цели сигнала на входе приемного устройства РЛС.
Для этого рассчитывается мощность, подводимая приемной антенной к ее нагрузке [Справочник по радиолокации. Под ред. М. Сколника. Нью-Йорк, 1970. Пер. с англ. (в четырех томах) под общей ред. К.Н. Трофимова. Том 1. Основы радиолокации. Под ред. Я.С. Ицхоки. - М.: «Сов. радио», 1976. - 456 с.]:


На восьмом этапе способа в блоке 2.1 рассчитывается минимальная мощность сигнала на входе приемника, при которой он обнаруживается с заданными вероятностями правильного обнаружения Р и ложной тревоги F (пороговая мощность).
По заданным в исходных данных характеристикам обнаружения Р и F определяют qпор, которое для пачки некогерентных радиоимпульсов при отсутствии флуктуаций амплитуды рассчитывается по формуле [Бакулев П.А. Радиолокационные системы. Учебник для вузов. Изд. 3-е, перераб. и доп. - М.: Радиотехника, 2015. - 440 с.]:


Далее рассчитывается пороговая мощность для пачки некогерентных радиоимпульсов:

На девятом этапе способа в блоке 2.1 моделируется обнаружение цели.
Проверяется условие превышения мощности отраженного от цели сигнала пороговой мощности на входе приемного устройства РЛС:

При выполнении условия (49) ГЗКР считается обнаруженной и в блок 4 памяти записывается дальность dгзкр, угол места εгзкр и показатели качества обнаружения Р и F. В противном случае осуществляется возврат ко второму этапу.
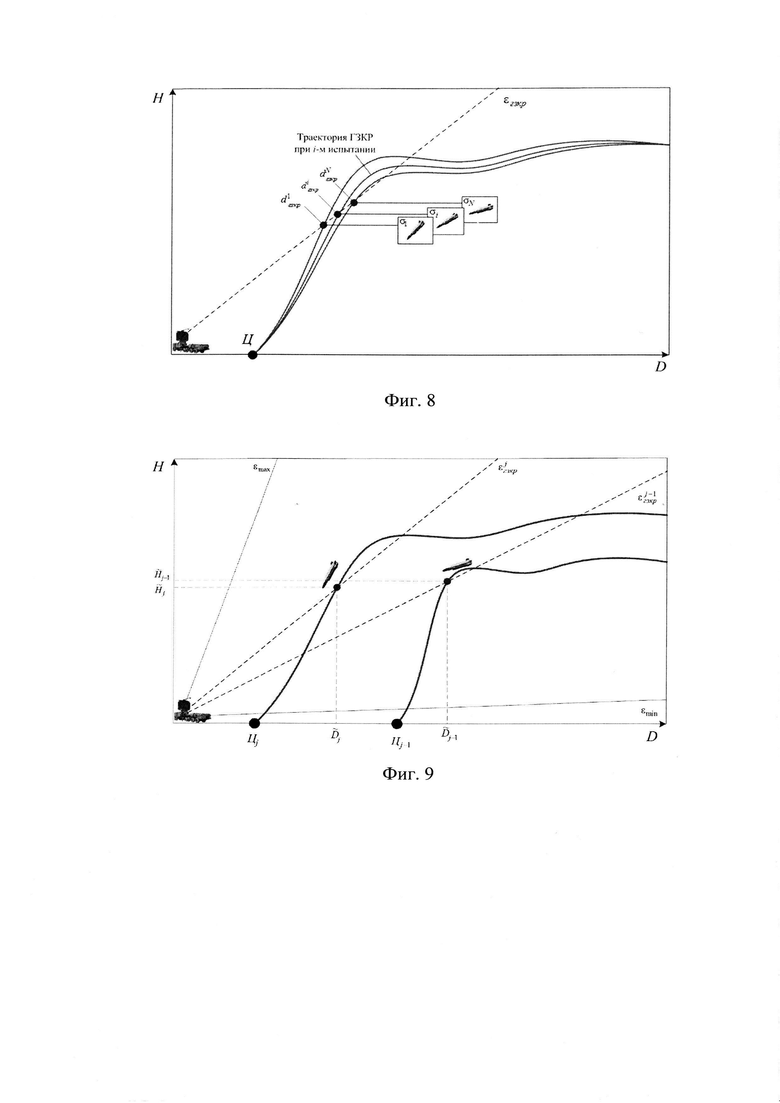
На десятом этапе способа, используя метод статистического моделирования [Сирота А.А. Компьютерное моделирование и оценка эффективности сложных систем. - Москва: Техносфера, 2006. - 280 с.], (при этом начальные условия моделирования (положение центра масс ГЗКР, ориентация относительно вектора скорости, скорость и ориентация вектора скорости цели) должны изменяться случайным образом в заданном диапазоне) проводится необходимое количество испытаний N на устройстве (этапы 1-9 способа) для получения статистических данных по дальностям обнаружения ГЗКР  ,
,  при заданном угле места цели εгзкр (фиг. 8).
при заданном угле места цели εгзкр (фиг. 8).
Для набора статистических данных по дальностям обнаружения при других значениях угла места цели  ,
,  соответствующим образом изменяются координаты цели
соответствующим образом изменяются координаты цели  при задании исходных данных для моделирования (фиг. 9).
при задании исходных данных для моделирования (фиг. 9).
После чего на одиннадцатом этапе способа в блоке 5 расчета зоны обнаружения осуществляется расчет оценки математического ожидания дальности и высоты обнаружения ГЗКР на каждом направлении по углу места  ,
,  с заданным шагом Δε:
с заданным шагом Δε:

где  - дальность обнаружения ГЗКР, полученная при i-м испытании при угле места
- дальность обнаружения ГЗКР, полученная при i-м испытании при угле места  , N - общее число испытаний на устройстве при угле места
, N - общее число испытаний на устройстве при угле места  .
.

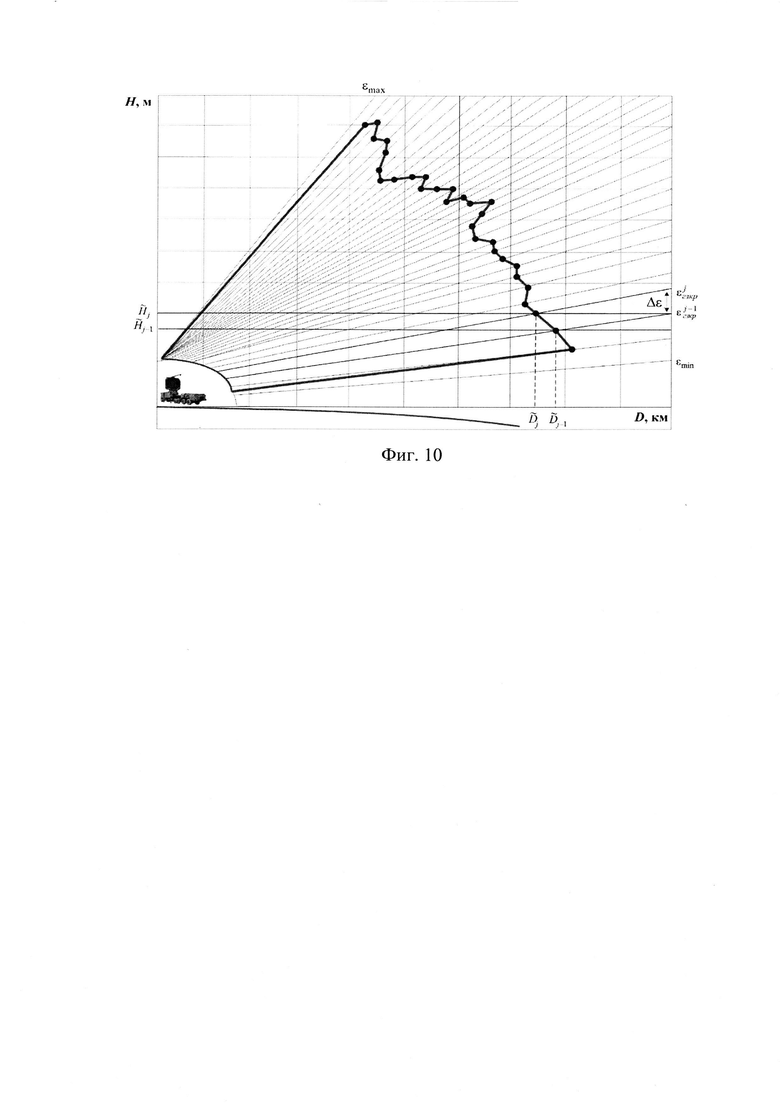
Далее осуществляется расчет вертикального сечения зоны обнаружения ГЗКР путем нанесения на координатную сетку полученных значений  по каждому угломестному направлению
по каждому угломестному направлению  и построения замкнутой кривой, ограничивающей зону обнаружения (фиг. 10).
и построения замкнутой кривой, ограничивающей зону обнаружения (фиг. 10).
Результаты расчетов выводятся на дисплей интерфейса 1 ввода исходных данных и анализа результатов моделирования.
Таким образом, представленный способ позволяет оценить эффективность информационных средств ЗРК (ЗРС) при обнаружении ГЗКР с учетом динамической ЭПР цели и может быть использован при формировании характеристик и сравнении альтернативных вариантов перспективных РЛС.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ДИНАМИЧЕСКОЙ ЭФФЕКТИВНОЙ ПЛОЩАДИ РАССЕЯНИЯ ГИПЕРЗВУКОВОЙ КРЫЛАТОЙ РАКЕТЫ | 2019 |
|
RU2724781C1 |
| Способ определения географических координат источников радиоизлучения в многоцелевой обстановке | 2021 |
|
RU2773307C1 |
| Способ обзора пространства и средство управления зенитно-ракетной системы для его осуществления | 2018 |
|
RU2685556C1 |
| УСТРОЙСТВО ОПТИМИЗАЦИИ ВЕСОВЫХ КОЭФФИЦИЕНТОВ СЛЕДЯЩЕЙ ФИЛЬТРАЦИИ | 2022 |
|
RU2805171C1 |
| СИСТЕМА НАВЕДЕНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ | 2006 |
|
RU2329454C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЙ С БОРТА ЛЕТАТЕЛЬНОГО АППАРАТА | 2016 |
|
RU2619915C1 |
| Имитатор радиолокационных целей | 2021 |
|
RU2787576C1 |
| КОМАНДНЫЙ ПУНКТ ЗЕНИТНОЙ РАКЕТНОЙ СИСТЕМЫ | 2019 |
|
RU2746087C1 |
| СПОСОБ ФОРМИРОВАНИЯ ПРОСТРАНСТВЕННО-РАСПРЕДЕЛЕННОЙ СИСТЕМЫ МАСКИРОВКИ ВЫСОКОСКОРОСТНОГО ОБЪЕКТА | 2020 |
|
RU2739903C1 |
| Способ обзора пространства (варианты) | 2018 |
|
RU2692076C1 |
Изобретение относится к области моделирования. Технический результат заключается в обеспечении возможности оценки эффективности информационных средств ЗРК (ЗРС) при обнаружении гиперзвуковой крылатой ракеты с учетом динамической ЭПР цели. Такой результат достигается тем, что осуществляется расчет вертикального сечения зоны обнаружения, задают исходные данные для моделирования, рассчитываются положение центра масс ГЗКР в геоцентрической системе координат, параметры движения центра масс ГЗКР относительно наземной РЛС обнаружения, проверяется возможность обнаружения цели РЛС, производится расчет параметров движения цели вокруг центра масс относительно РЛС и ее линии визирования, рассчитывается значение эффективной поверхности рассеяния ГЗКР на текущем шаге по времени в зависимости от ориентации цели относительно линии визирования РЛС, производится расчет мощности отраженного от цели сигнала на входе приемного устройства РЛС, рассчитывается минимальная мощность сигнала на входе приемника, при которой он обнаруживается с заданными вероятностями правильного обнаружения Р и ложной тревоги F, моделируется обнаружение цели, проводится необходимое количество испытаний на устройстве для получения статистических данных по дальностям обнаружения ГЗКР при различных углах места цели, осуществляется расчет оценки математического ожидания дальности и высоты обнаружения ГЗКР на каждом направлении по углу места с заданным шагом. 10 ил.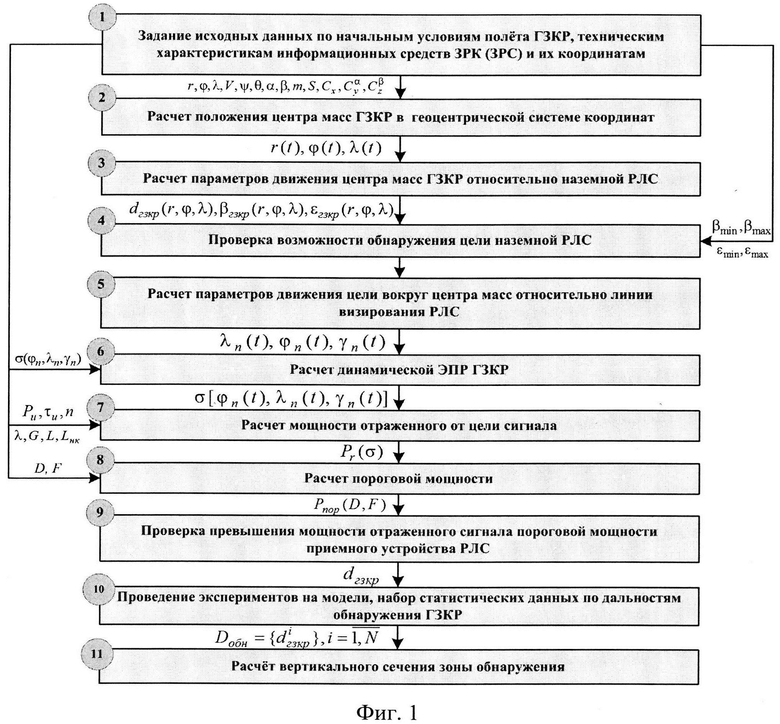
Способ оценки эффективности информационных средств ЗРК (ЗРС) при обнаружении гиперзвуковой крылатой ракеты, заключающийся в том, что осуществляется расчет вертикального сечения зоны обнаружения, отличающийся от существующих тем, что с целью обеспечения возможности учета динамической эффективной поверхности рассеяния гиперзвуковой крылатой ракеты задают исходные данные для моделирования, рассчитываются положение центра масс ГЗКР в геоцентрической системе координат, параметры движения центра масс ГЗКР относительно наземной РЛС обнаружения, проверяется возможность обнаружения цели РЛС, производится расчет параметров движения цели вокруг центра масс относительно РЛС и ее линии визирования, рассчитывается значение эффективной поверхности рассеяния ГЗКР на текущем шаге по времени в зависимости от ориентации цели относительно линии визирования РЛС, производится расчет мощности отраженного от цели сигнала на входе приемного устройства РЛС, рассчитывается минимальная мощность сигнала на входе приемника, при которой он обнаруживается с заданными вероятностями правильного обнаружения Р и ложной тревоги F, моделируется обнаружение цели, проводится необходимое количество испытаний на устройстве для получения статистических данных по дальностям обнаружения ГЗКР при различных углах места цели, осуществляется расчет оценки математического ожидания дальности и высоты обнаружения ГЗКР на каждом направлении по углу места с заданным шагом.
| СПОСОБ ОПРЕДЕЛЕНИЯ ЭФФЕКТИВНОСТИ МНОГОПОЗИЦИОННОЙ ГИДРОАКУСТИЧЕСКОЙ СИСТЕМЫ | 2015 |
|
RU2611556C1 |
| Индукционный датчик для непрерывного регулирования плотности протекающей жидкости | 1957 |
|
SU109870A1 |
| СПОСОБ ОЦЕНКИ ХАРАКТЕРИСТИК РАДИОЛОКАЦИОННОЙ СТАНЦИИ ПРИ ДЕЙСТВИИ АКТИВНЫХ ШУМОВЫХ ПОМЕХ | 2000 |
|
RU2193782C2 |
| СПОСОБ РАСПОЗНАВАНИЯ ЦЕЛИ (ВАРИАНТЫ) | 2013 |
|
RU2549192C1 |
| US 6161434 A, 19.12.2000. | |||

