Изобретение относится к области антенной техники, а именно, к устройствам получения информации о форме, топологии и других свойствах поверхности объекта и предназначено для использования в системах радиолокации, радио-, оптической и фотонной связи, лазерных радарах от ультрафиолетового до терагерцового диапазона длин волн, а также для измерения криволинейной формы поверхности тел и может быть использовано в средствах радиотехнического и оптического контроля элементов средств обнаружения и пеленгования источников электромагнитного излучения.
Устройство контроля формы произвольной отражающей поверхности антенн активных и пассивных радарных систем применяется в автономных системах измерения формы, отражающей электромагнитное излучение, поверхности рефлекторов параболических и другого типа антенн и контроля неравномерности их рельефа путем сканирования по некоторой траектории их поверхности, пространственно ограниченным пучком излучения, в средствах неразрушающего контроля состояния поверхности, включая динамику их изменения, по принципу локации.
Известно устройство контроля и управления формой отражающей поверхности антенной системы зеркального типа (RU №2576493, кл. H01Q 3/01, опубл. 05.02.2016), включающее рефлектор, оборудованный корпусом, набором устройств деформации, устройством привода, переключающим устройством, системой управления переключающим устройством, гибкой мембраной с отражателем, сформированным нанесением металлических частиц на поверхность гибкой мембраны, с введенным в систему управления переключающим устройством внешнего контура, ограничивающего отражающую поверхность гибкой мембраны рефлектора, который задают в виде выпуклого многогранника.
Недостаток устройства - малая точность оценки произвольности формы и степени неравномерности отражающей поверхности гибкой мембраны рефлектора, связанная с малым коэффициентом усиления антенны, особенно в области верхних частот, и искажениями формы главного лепестка диаграммы направленности, обусловленными дискретностью структуры и несинфазным сложением полей, фокусируемых различными фрагментами селективной поверхности гибкого отражателя.
Наиболее близким к заявляемому техническому решению является устройство контроля формы отражающей поверхности антенной системы зеркального типа, состоящее из установленных на шасси рефлектора антенны и сканера с системой управления. Рефлектор антенны выполнен в виде приемно-передающего зонда и через переключающее устройство связан с генератором и приемником радиоизлучения, выход которого подключен к первому входу вычислительного устройства, первый выход которого соединен с входом системы управления сканером (Фёдоров И.Б., Слукин Г.П., Митрохин В.Н., Крехтунов В.М. Элементная база зеркальных антенн и фазированных антенных решеток радиотехнических систем. Антенны, 2016, №8(228), с. 87-88).
Недостатками прототипа являются низкие точность, надежность и достоверность измерения зондом из-за неравномерности формы поверхности отражателя, внесенной изменением формы диаграммы направленности (ДН) радиоизлучения, обусловленной высоким уровнем ближних боковых лепестков ДН в плоскостях измерения, особенно внутри пучка радиолучей, вызванных неоднородным изменением амплитуды возбуждения апертуры от излучателя, что приводит к погрешности измерения формы ДН и поверхности рефлектора антенной системы. Кроме того, антенна системы имеет большие размеры, что также существенно снижает точность измерения профиля отражателя, удаленного от излучателя на определенное расстояние.
Технической проблемой изобретения является создание устройства контроля формы отражающей поверхности антенной системы зеркального типа, обеспечивающее возможность идентификации реального профиля формы и неравномерности поверхности, а также асимметрии произвольной криволинейной формы поверхности рефлектора антенны для компенсации в реальном времени погрешностей формирования антенной ДН.
Техническим результатом изобретения является повышение точности и достоверности измерения типа формы и неравномерности произвольной криволинейной отражающей поверхности антенной системы.
Поставленная проблема и технический результат достигаются тем, что устройство контроля криволинейной формы отражающей поверхности антенной системы зеркального типа включает рефлектор антенны и сканер с системой управления, связанный с выходом вычислительного устройства. Согласно изобретению устройство дополнительно содержит источник оптического пучка и оптический приемник, размещенные на сканере, первый и второй квадраторы сигнала, сумматор, блок извлечения корня квадратного из величины, делитель и блок вычисления угла положения оптического пучка на поверхности рефлектора, причем выход источника оптического пучка соединен с входом первого квадратора и первым входом делителя, а второй вход делителя подключен к выходу оптического приемника, связанного с входом второго квадратора, при этом выход второго квадратора соединен с вторым входом сумматора, первый вход которого подключен к выходу первого квадратора, а выход сумматора соединен с входом блока вычисления корня квадратного, причем выходом связанного с первым входом вычислительного устройства, второй вход которого подключен к выходу блока вычисления угла положения оптического пучка, вход которого соединен с выходом делителя.
Отражающая излучение поверхность рефлектора антенной системы может быть любой криволинейной формы и, в частном случае, представлять собой поверхность параболоида или другого криволинейного типа поверхности вращения.
Дополнительное включение в устройство источника оптического пучка и оптического приемника, первого и второго квадраторов сигнала, сумматора, блока извлечения корня квадратного из величины, делителя и блока вычисления угла положения оптического пучка на поверхности рефлектора, позволяет определить форму любого типа криволинейной поверхности рефлектора одновременно с измерением распределения неравномерности отражающей поверхности рефлектора антенной системы с более высокой точностью, сопоставимой с размером оптического пучка, сформированного источником.
Размещение на сканере, разнесенных на определенное расстояние, источника оптического пучка и оптического приемника обеспечивает синхронность облучения, сканирования и измерения одних и тех же элементов произвольного профиля криволинейной поверхности рефлектора оптическим пучком и, смещенным на определенное расстояние, оптическим приемником в одни и те же моменты реального времени, что однозначно повышает достоверность и точность измерения предлагаемым устройством.
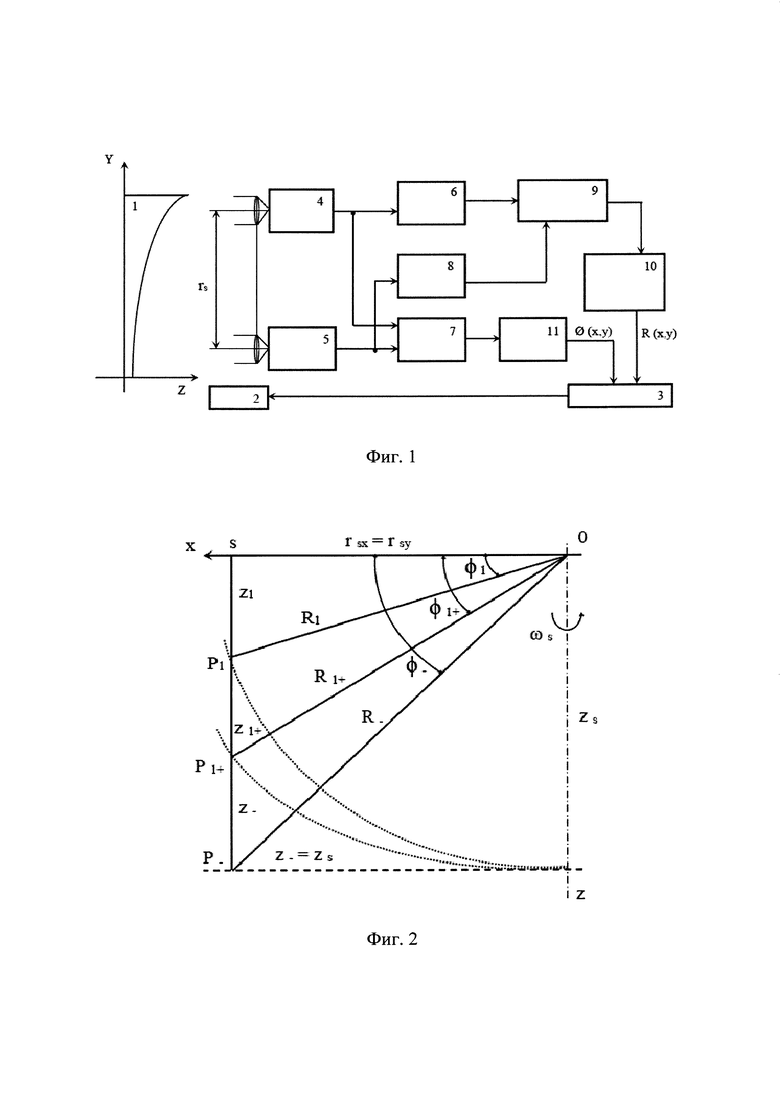
Изобретение иллюстрируется чертежами, где на фиг. 1 представлена схема устройства измерения формы произвольной отражающей поверхности рефлектора антенной системы, а фиг. 2 графически поясняет сущность метода измерения и принципа определения базовых параметров для идентификации формы произвольной отражающей поверхности рефлектора путем синхронного вращения источника и приемника излучения оптического пучка в координатной (х; у) плоскости сканирования ортогональной оси z, являющейся осью симметрии кольцевой траектории сканирования параллельным оси z оптическим пучком поверхности рефлектора антенны.
Устройство контроля формы криволинейной отражающей поверхности антенной системы состоит из рефлектора 1 в виде криволинейной произвольной формы отражающей поверхности рефлектора, в частном случае, плоской поверхности или параболоида вращения и сканера 2 с системой управления, входом связанного с выходом вычислительного устройства 3. Источник оптического пучка 4 и оптический приемник 5, размещенные на сканере 2, разнесенных на расстояние rs, выбранное, исходя из требований необходимой точности проведения измерения, с обеспечением синхронности облучения, сканирования и измерения одного и того же элемента произвольного профиля криволинейной поверхности рефлектора 1 оптическим пучком источника 4 и, также расположенном на сканере 2, но смещенным (фиг. 2) относительно положения источника 4 в направлении оси вращения сканера 2, оптическим приемником 5 в одни и те же моменты реального времени сканирования. Выходной электрический сигнал источника 4, характеризующий численное значение расстояния rs источника 4 и оптического приемника 5 на сканере 2, подается на вход первого квадратора 6 и первый вход делителя 7. Второй вход делителя 7 подключен к выходу оптического приемника 5. Выходной сигнал, снимаемый с оптического приемника 5, одновременно с подачей его на второй вход делителя 7, поступает на вход второго квадратора 8, выходом подключенного к второму входу сумматора сигналов 9. Сумматор сигналов 9 осуществляет арифметическую операцию суммирования квадратов выходного сигнала источника 4, подаваемого на первый вход сумматора 9, и квадрата значения выходного сигнала оптического приемника 5, подаваемого на второй вход сумматора 9. Выходной сигнал сумматор 9 подается на вход схемы извлечения корня квадратного 10 из величины этой суммы сигналов. Значение выходного сигнала, формируемого схемой извлечения корня квадратного 10, характеризует расстояние от чувствительной поверхности оптического приемника 5 до изображения оптического пучка источника 4 на поверхности рефлектора 1 антенны. Полученное значение сигнала о расстоянии до места положения изображения оптического пучка источника 4 на поверхности рефлектора 1 антенны поступает на первый вход вычислительного устройства 3, где используется для контроля динамики изменения этого расстояния и идентификации типа и формы произвольной отражающей поверхности рефлектора 1 антенны. Второй вход вычислительного устройства 3 соединен с выходом блока 11 вычисления угла положения изображения оптического пучка источника 4 на поверхности рефлектора 1. Блок 11 вычисления угла положения изображения оптического пучка определяет вторую координату, а именно, угол расположения изображения оптического пучка источника 4, наблюдаемого оптическим приемником 5 на поверхности рефлектора 1. Вторая координата определяется в полярной системе координат кольцевой траектории сканирования оптическим пучком источника 4 поверхности рефлектора 1 определения. Выход вычислительного устройства 3 подключен к входу сканера 2 с системой управления сканером. Таким образом, предложенное устройство контроля формы отражающей поверхности антенной системы формирует основные параметры однозначного определения координат расположения изображения оптического пучка источника 4 в полярной системе координат, движущегося по кольцевой траектории сканирования по криволинейной поверхности рефлектора 1 антенной системы.
На фиг. 2 изображен график, поясняющий принцип и сущность метода контроля и идентификации формы криволинейной отражающей поверхности рефлектора антенной системы путем сканирования в плоскости XY оптическим пучком отражающей поверхности рефлектора по кольцевой траектории сканирования с круговой частотой ω "радиус-векторной разверткой" поверхности рефлектора.
На фиг. 2 введены следующие обозначения:
0х - ось расположения источника оптического пучка 4 и оптического приемника 5 на сканере 2 с системой управления сканером;
rs=rsx=rsy - расстояние разноса по оси 0х координат мест расположения источника 4 и оптического приемника 5 на сканере 2 с системой управления сканером, определяющих расположение осей симметрии оптического пучка, поля его наблюдения оптическим приемником 5 и размер кольцевой траектории сканирования параллельным оси z оптическим пучком поверхности рефлектора 1 антенны;
0z - ось симметрии кольцевой траектории сканирования параллельным оси z оптическим пучком поверхности рефлектора 1 антенны;
ω - круговая частота траектории кольцевого сканирования оптическим пучком - "радиус-векторной развертки" поверхности рефлектора 1 антенны;
zs - расстояние между XY плоскостью расположения источника 4 и оптического приемника 5 на сканере 2, осуществляющем вращательное движение источника 4 и поля зрения оптического приемника 5 по траектории кольцевого сканирования оптическим пучком и нижней центральной точкой (x=0;.у=0) поверхности рефлектора 1, проходящей через ось вращения, являющейся осью симметрии XY-плоскости расположения поверхности рефлектора 1 антенны и кольцевой траектории сканирования параллельной оси z оптического пучка источника 4;
S - точка (х; у; z) координат расположения источника оптического пучка 4 и оси симметрии оптического пучка на сканере 2;
Р - точка (х; у; z) положения центра оптического пучка источника 4 на поверхности рефлектора 1 антенны с радиусами кривизны: P1(x; у, z) - радиуса R1(x; у; z); Р1+(х; у; z) - радиуса R1+(x; у; z); Р_(х; у; z) - радиуса R_(x; у; z) соответствующего плоской поверхности рефлектора антенны;
R1(х; у; z) - расстояние от оптического приемника 5 до расположения оптического пучка на отражающей поверхности рефлектора некоторого произвольного радиуса кривизны поверхности рефлектора антенны;
R1+(x; y; z)>R1(x; у; z) - расстояние от оптического приемника 5 до расположения оптического пучка на отражающей поверхности рефлектора имеющего больший радиус кривизны отражающей поверхности рефлектора антенны, чем в случае R1(x; у; z);
R_(х; у; z) - расстояние от оптического приемника 5 до расположения оптического пучка на отражающей поверхности рефлектора, имеющего значительно больший (стремящийся к →∞) радиус кривизны отражающей поверхности рефлектора антенны, чем в случае R1(x; у; z) и R1+(x; у; z), в пределе соответствующий рефлектору антенны с плоской поверхностью;
ϕ1(x; у; z) - угол наблюдения оптическим приемником 5 положения оптического пучка на отражающей поверхности рефлектора, находящегося на расстоянии R1(x; у; z) от оптического приемника 5 в плоскости (х; у; z1) на кольцевой траектории сканирования;
ϕ1+(x; y; z) - угол наблюдения оптическим приемником 5 положения оптического пучка на отражающей поверхности рефлектора, находящегося на расстоянии R1+(x; у; z)>R1(x; у; z) в плоскости (х; у; z1+) на кольцевой траектории сканирования;
ϕ_(x; у; z) - угол наблюдения оптическим приемником 5 положения оптического пучка на отражающей поверхности плоского рефлектора, находящегося на расстоянии R_(jc; у; z) в плоскости (х; у; zs), соответствующий антенне с плоской поверхностью z=zs на кольцевой траектории сканирования поверхности рефлектора оптическим пучком.
Устройство контроля формы криволинейной отражающей поверхности рефлектора антенной системы работает следующим образом.
Оптический пучок источника 4 и смещенный от него на выбранное по требованиям измерений расстояние оптический приемник 5, установленные на сканере 2 с системой управления, под действием сигналов, сформированных вычислительным устройством 3 и поступающих в сканер 2 с системой управления, в плоскости (х, у), находящейся на расстоянии zs от нижней опорной точки отражающей поверхности рефлектора, синхронно осуществляют по кольцевой траектории радиус-векторной развертки сканирование оптическим пучком источника 4 и полем зрения оптического приемника 5 отражающей поверхности рефлектора 1 антенной системы. В зависимости от радиуса кривизны отражающей поверхности рефлектора оптический пучок будет освещать поверхность рефлектора на разной высоте относительно уровня 0z исходной XY плоскости расположения источника 4 и оптического приемника 5 на сканере 2. Если отражающая поверхность рефлектора плоская, то ее радиус кривизны как плоской поверхности стремится к →∞) и расстояние от оптического приемника 5 до расположения оптического пучка на отражающей поверхности плоского рефлектора, удаленной на расстояние z_ от уровня 0z исходной XY плоскости положения источника 4 и оптического приемника 5 на сканере 2, составит R_(x; у; z).
Источник оптического пучка 4 и оптический приемник 5, установленные на сканере 2, а вместе с ними оптический пучок и поле наблюдения приемника, перемещаются в (х, у) - плоскости 0z сканирования в пределах кольцевой траектории радиус-векторной развертки сканирования со скоростью ω, установленной вычислительным устройством 3.
Таким образом, можно записать следующие соотношения для определения основных параметров форм криволинейной отражающей поверхности рефлекторов антенной системы:
расстояние от оптического приемника 5 до расположения оптического пучка на отражающей поверхности рефлектора некоторого произвольного радиуса кривизны поверхности рефлектора антенны, формируется схемой извлечения корня квадратного 10, из сигнала сумматора 9, на основе выходных сигналов источника оптического пучка 4 и оптического приемника 5, поступающих на входы сумматора 9 с первого квадратора 6 и второго квадратора 8, на основе алгоритма описываемого формулой:

угол наблюдения оптическим приемником 5 положения оптического пучка на отражающей поверхности рефлектора, находящегося на расстоянии Ri(x; у; z) от оптического приемника 5 в плоскости (х; у; zi) на кольцевой траектории сканирования, определяется на основе выходных сигналов источника оптического пучка 4 и оптического приемника 5, поступающих на входы блока 11 вычисления угла положения изображения оптического пучка источника 4 на поверхности рефлектора 1 с делителя 7, на основе алгоритма описываемого формулой:

величина отклонения криволинейного профиля отражающей поверхности рефлектора 1 антенны от уровня zs R_(x; у; z) плоскости XY положения отражающей поверхности плоского рефлектора определяется вычислительным устройством 3 по значениям R(x; y; z) и ϕi(x; y; z), подаваемых на его первый и второй входы и получаемых в блоке извлечения корня квадратного 10 и блоке 11 вычисления угла положения оптического пучка источника 4 на отражающей поверхности рефлектора 1 на основе выходных сигналов источника оптического пучка 4 и оптического приемника 5, по формуле:

На основе полученного в (3) значения ΔR~(x; у; z) определяются βi(x; у; z) - половинное значение центрального угла, охватываемого сектором отражающей поверхности криволинейного рефлектора 1, ограниченного координатой положения оптического пучка источника 4 на отражающей поверхности рефлектора 1 в плоскости (х; у; zi) при сканировании поверхности рефлектора по кольцевой траектории

в результате получаем значение R~(x; у; z) - радиуса кривизны отражающей поверхности криволинейного рефлектора 1, ограниченного координатой положения оптического пучка источника 4 на отражающей поверхности рефлектора 1 в плоскости (х; у; z,) при сканировании поверхности рефлектора оптическим пучком по кольцевой траектории 
при большом радиусе кривизны отражающей поверхности рефлектора, близкой по параметрам к плоской поверхности антенн, когда (zs-zi(x; y; z)=Δz(x; y; z) является весьма малой величиной, то используя свойство функции синуса, а именно, «синус малых углов равен значению самого угла», то есть, при

получим формулу для определения параметров рефлектора с малым градиентом кривизны отражающей поверхности или радиуса кривизны поверхности рефлектора большого диаметра с малым градиентом кривизны:

Измерения и контроль формы отражающей поверхности рефлектора антенны проводятся в системе координат, начало которой располагается в вершине отражающей поверхности, совмещенной с центром симметрии плоской или криволинейной поверхности исследуемого рефлектора 1. Расстояние удаления поверхности рефлектора 1 до плоскости сканирования 0z выбирают на основе требований работы процедуры измерения оптическим пучком источника 4 профиля отражающей поверхности рефлектора 1 в плоскости (х; у; zi).
Поскольку сканирование оптическим пучком источника 4 и полем зрения оптического приемника 5 поверхности рефлектора 1 ведется в плоскости сканирования (х; у; zi) синхронно по одной и той же кольцевой траектории сканирования с центром симметрии совмещенной с z - осью симметрии (х; у; zi) плоской или криволинейной отражающей поверхности рефлектора 1 трехмерной системы измерения (х, у, z), то области элементов изображения оптического пучка источника 4 и области наблюдения оптического приемника 5 синхронно с одной и той же скоростью в пределах погрешности их совмещения проходят по одним элементам поверхности (х; у; zi) плоской или криволинейной отражающей поверхности рефлектора 1 антенны.
Данные о профиле отражающей поверхности рефлектора 1, положении изображения оптического пучка источника 4 на плоской или криволинейной отражающей поверхности рефлектора 1, области наблюдения оптического приемника 5, принятого оптическим приемником 5 сигнала и расстояния разноса положений источника 4 и оптического приемника 5 в плоскости сканирования 0z и плоскости (x; y;zi) передаются в блоки 6-11 устройства (фиг. 1) и в вычислительное устройство 3 (спецпроцессор, персональный компьютер), которое обрабатывает получаемую информацию по установленным в устройстве 3 алгоритмам, изложенным выше в настоящем описании.
Для получения численной оценки выигрыша в точности и чувствительности измерения формы профиля криволинейной поверхности рефлектора 1 антенны от применения предлагаемого устройства контроля формы отражающей поверхности антенной системы и для компенсации в реальном времени погрешностей формирования антенной ДН поверхности рефлектора примем оптический приемник 5 линейным, содержащим Nэ элементов числом от 103 до 104 элементов в строке. Размеры элемента современных приемников лежат в диапазоне от 1 мкм=10-6м до 10 мкм=10-5м. Таким образом, например, принимая масштаб передачи измеряемого параметра zi=zs равным единице, можно утверждать, что в самом простейшем случае координата zs может быть измерена с точностью до размера элемента, то есть с точностью, равной 1 мкм=10-6м, что в угловой мере измерения угла ϕi и βi как тангенса угла, охватываемого одним элементом, размером составит 1 мкм=10-6 м на базе разноса rs(x; y; 0) оптического пучка источника 4 и оптического приемника 5 равного 10 см=10-1 м составит величину примерно равную Δ=10-6м/10-1м=10-5 радиан или Δ=10-5рад=216000⋅10-5=2,16 угл.сек. Применение метода определения координат положения центра тяжести изображения оптического пучка позволяет на порядок повысить точность определения координат изображения пучка, то есть определять угловую меру измерения углов ϕi и βi с погрешностью измерения, равной доли угловой секунды, то есть не хуже Δ=10-6 рад=216000⋅10-6=0,216 угл.сек. Такое значение указанной точности обеспечивает измерение параметров криволинейного профиля отражающей поверхности рефлектора в относительной мере составляющей порядка (0,01…0,001)% от значения измеряемого параметра.
Практическое использование предлагаемого устройства контроля формы отражающей поверхности антенной системы зеркального типа, обеспечивающее возможность идентификации реальной кривизны профиля формы поверхности и асимметрии криволинейной формы произвольной поверхности рефлектора антенны для компенсации в реальном времени погрешностей формирования диаграммы направленности антенной возможно в любом типе антенных полигонов; применение устройства обеспечивает восстановление исходных параметров карт профиля поверхности отражателя рефлекторов практически любого радиодиапазона с повышенной точностью оценки профиля криволинейной поверхности антенн.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство контроля диаграммы направленности и формы отражающей поверхности антенной системы | 2019 |
|
RU2725514C1 |
| Устройство контроля формы отражающей поверхности антенной системы зеркального типа | 2019 |
|
RU2718127C1 |
| УСТРОЙСТВО И СПОСОБ ОПТИЧЕСКОГО ОСВЕЩЕНИЯ | 2008 |
|
RU2510060C2 |
| Способ калибровки лазерного сканера, предназначенного для оценки качества поверхности сварного шва | 2023 |
|
RU2821171C1 |
| Портальный сканер | 2018 |
|
RU2718776C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ РАДИОТЕХНИЧЕСКИХ ХАРАКТЕРИСТИК КРУПНОГАБАРИТНЫХ АНТЕНН ДЛЯ КОСМИЧЕСКИХ АППАРАТОВ БЕЗ ИХ НЕПОСРЕДСТВЕННЫХ ИЗМЕРЕНИЙ | 2013 |
|
RU2541206C2 |
| СИСТЕМА И МЕТОД СКАНИРОВАНИЯ ЛУЧОМ УЛЬТРАКОРОТКОГО ИМПУЛЬСНОГО ИЗЛУЧЕНИЯ | 2013 |
|
RU2629547C2 |
| Устройство для идентификации параметров систем управления | 1979 |
|
SU885976A1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ НА ИСТОЧНИК ЗВУКА | 2011 |
|
RU2476898C1 |
| Устройство для измерения амплитудно-фазового распределения поля антенны в ближней зоне | 1987 |
|
SU1478157A1 |
Изобретение относится к области метрологии, а именно к устройствам получения информации о форме, топологии и других свойствах поверхности объекта. Устройство контроля криволинейной формы отражающей поверхности антенной системы зеркального типа включает рефлектор антенны и сканер с системой управления, связанный с выходом вычислительного устройства. Устройство дополнительно содержит источник оптического пучка и оптический приемник, размещенные на сканере, первый и второй квадраторы сигнала, сумматор, блок извлечения корня квадратного из величины, делитель и блок вычисления угла положения оптического пучка на поверхности рефлектора, причем выход источника оптического пучка соединен с входом первого квадратора и первым входом делителя, а второй вход делителя подключен к выходу оптического приемника, связанного с входом второго квадратора, при этом выход второго квадратора соединен с вторым входом сумматора, первый вход которого подключен к выходу первого квадратора, а выход сумматора соединен с входом блока вычисления корня квадратного, причем выходом связанного с первым входом вычислительного устройства, второй вход которого подключен к выходу блока вычисления угла положения оптического пучка, вход которого соединен с выходом делителя. Технический результат - повышение точности и достоверности измерения типа формы и неравномерности произвольной криволинейной отражающей поверхности антенной системы. 2 ил.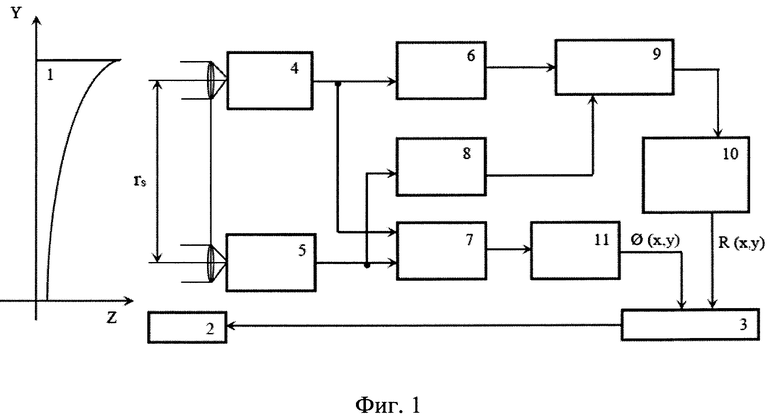
Устройство контроля формы криволинейной отражающей поверхности рефлектора антенной системы, включающее рефлектор антенны и сканер с системой управления, связанный с выходом вычислительного устройства, отличающееся тем, что устройство дополнительно содержит источник оптического пучка и оптический приемник, размещенные на сканере, первый и второй квадраторы сигнала, сумматор, блок извлечения корня квадратного из величины, делитель и блок вычисления угла положения оптического пучка на поверхности рефлектора, причем выход источника оптического пучка соединен с входом первого квадратора и первым входом делителя, а второй вход делителя подключен к выходу оптического приемника, связанного с входом второго квадратора, при этом выход второго квадратора соединен с вторым входом сумматора, первый вход которого подключен к выходу первого квадратора, а выход сумматора соединен с входом блока вычисления корня квадратного, причем выходом связанного с первым входом вычислительного устройства, второй вход которого подключен к выходу блока вычисления угла положения оптического пучка, вход которого соединен с выходом делителя.
| JP 3252513 A, 11.11.1991 | |||
| JP 3251708 A, 11.11.1991 | |||
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ФОРМЫ ПОВЕРХНОСТИ | 1990 |
|
SU1708053A1 |
| Цифровое устройство селекции движущихся целей | 1984 |
|
SU1841294A1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ КООРДИНАТ МЕСТОПОЛОЖЕНИЯ ГИДРОСАМОЛЕТА НА ПОВЕРХНОСТИ МОРЯ | 1990 |
|
RU1797300C |
| Электрическая печь для плавки металлов | 1949 |
|
SU80638A1 |
| АДАПТИВНЫЙ ИЗМЕРИТЕЛЬ ПАРАМЕТРОВ НЕПРЕРЫВНЫХ ШИРОКОПОЛОСНЫХ СИГНАЛОВ | 2007 |
|
RU2349923C1 |
| Автоматическое устройство для поглощения гидравлических ударов в трубопроводах | 1949 |
|
SU82343A1 |
| US 4618261 21.10.1986 A1 | |||
| US 8895911 25.11.2014 B2 | |||
| CN 0106323478 18.01.2019 B | |||
| US 4225240 30.09.1980 A1 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ НА ИСТОЧНИК ОПТИЧЕСКОГО ИЗЛУЧЕНИЯ ПО РАССЕЯННОЙ В АТМОСФЕРЕ СОСТАВЛЯЮЩЕЙ И УСТРОЙСТВО ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2285275C1 |

