(54) УСТРОЙСТВО ДЛЯ ИДЕНТИФИКАЦИИ ПАРАМЕТЮВ СИСТЕМ УПРАВЛЕНИЯ
| название | год | авторы | номер документа |
|---|---|---|---|
| Идентификатор параметров и состояния систем управления | 1981 |
|
SU962863A1 |
| Самонастраивающаяся система управления | 1978 |
|
SU746415A1 |
| Самонастраивающаяся система управления | 1977 |
|
SU650053A1 |
| Устройство для оптимального управления работой инерционного объекта с присоединенным упругим элементом | 1989 |
|
SU1659981A2 |
| Самонастраивающаяся система управления | 1984 |
|
SU1171755A1 |
| Адаптивная система управления | 1980 |
|
SU980070A1 |
| Система автоматического управления | 1984 |
|
SU1168897A1 |
| Система идентификации параметров линейных объектов | 1988 |
|
SU1534429A1 |
| Устройство для индентификации линейного объекта | 1978 |
|
SU744455A1 |
| Система последовательного финитного управления конечным состоянием линейных стационарных динамических объектов | 1987 |
|
SU1467534A1 |
1
Изобретение относится к автоматическому (управлению и регулированию и предназначено для .идентификации неизвестных параметров электромеханических, электрических и радиотехнических систем различного назначения.
Известны устройства идентификации параметров систем управления, содержащие модель, .блоки сравнения, сумматоры, интеграторы и умножители 1.
Известные устройства идентификации обладают недостаточно высокой точностью вычисления неизвестных параметров при изменении вида (амплитуды и формы) управляющего воздействия в условиях неполной информации о фазовых координатах объекта управления (т.е. когда некоторые фазовые координаты недоступнь приборному измерению).
Наиболее близким к предлагаемому является устройство, содержащее последовательно соединенные интеграторы, входы первого соединены с выходами соответствующих интеграторов и выходом объекта, который подключен к первому входу блока сравнения ко второму входу которого подсоединен через модель вход
объекта, матричный делитель, выходы которого соединены с первыми входами первых умножителей, выходы которых присоединены ко входам соответствующих сумматоров 2J.
Недостатком известного устройства является невысокая точность идентификации параметров при неполной информации о фазовых координатах объекта.
Цель изобретения - повышение точности идентификации параметров при неполной ин10формации о фазовых координатах объекта.
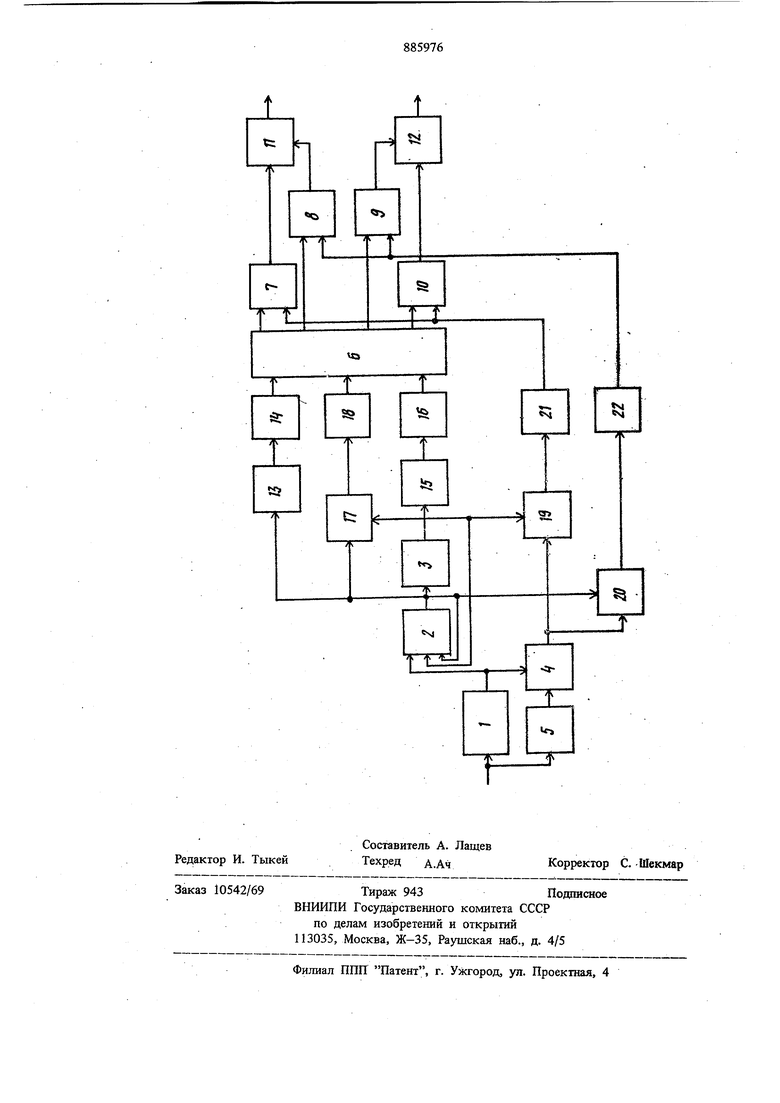
Поставленная цель достигается тем, что в устройство для идентификации параметров систем управления введены вторые и третьи умножители, квадраторы и дополнительные интегра15торы, причем выходы интеграторов через соответствующие последовательно соединенные квадратор и дополнительный интегратор подключены к соответствующим входам матричного делителя, выходы каждой пары интеграто20ров соединены со входами соответствующих вторых умножителей, выходы которых через соответствующие дополнительные интеграторы подключены ко входам матричного делителя. выходы интеграторов подключены к первым входам третьих умножителей, ко вторым входам которых подключен выход блока сравнения, а выходы третьих умножителей через соответству ющие дополнительные интеграторы подключены ко вторым входам соответствующих первых умножителей. На чертеже представлено устройство для идентификации параметров объекта, дифференциальные уравнения которого имеют второй порядок и 2. Устройство содержит объект 1 управления, который соединен с первым интегратором 2, последовательно соединенным с интегратором 3 Выходы интеграторов 2 и 3 соединены с соответствующими входами интегратора 2. Выход объекта 1 соединен также с первым входом блока 4 сравнения, ко второму входу которого подключен выход модели 5. Вход модели соединен с входом объекта 1. Выход матричного дели теля б соединен с первыми входами первых умножителей 7, 8, 9 и 1U. Выходы первых умножителей 7 и 8 соединены со входами сумматора 11, выходы первых умножителей 9 и 10 - со входами сумматора 12. Выходы сумматоров И и 12 являются выходами устройства для идентификации napaMiSTpoB. Выход интегратора 2 соединен со входами квадратора 13, выход которого через дополнительный интегратор 14 соединен со входом матричного делителя 6. Вы ход интегратора 3 соединен со входом квадрат ра 15, выход которого через дополнительный интегратор 16 соединен с матричным делителем 6. Выходы пары интеграторов 2 и 3 соединены с соответствующими входами второго умножит ля 17, выход которого через дополнительньш интегратор 18 соединен со входом матричного делителя 6. Выход блока 4 сравнения соединен с первыми входами третьих умножителей 19 и 20. Со вторым входом третьего умножителя 19 соединен выход интегратора 3, а со вторым входом третьего умножителя 20 соединен выход интегратора 2. Выход третьего умножителя 19 через дополнительный интегратор 21 соединен со вторыми входами первых умножителей 9 и 7, а выход третьего умножителя 20 через дополнительный интегратор 22 соединен со вторыми входами первых умножителей 1Q и 8. Работу устройства идентификации параметров систем управления описывают уравнения, где введены следующие обозначе1гия: х i (t) - выходная координата объекта 1 управления; yi(t) - выходная коорди шта модели 5; f J (t) - выходная координата блока сравнения 4; rii(t), r2i(t) - выходные координаты интеграторов 2 и 3; W , W,j,, iZ- вы ходные координаты матричного делителя 6; ai, аг - выходные сигналы сумматоров 11 и 12; f(t) - входное воздействие; С. вестные постоянные коэффициенты. k(t) А x(t) +F(t), х(0) х„ (1) где x(t)(t), ..., Xn(t) - (nxl) - вектор фазовых координат объекта 1 управления; А - (п п) - матрица параметров объекта 1 управления: в которой постоянные коэффициенты aj, ...ар Авляются неизвестными; F{t) ...0f(t)- (nxl) - вектор выходного воздействия. Приборно измеряются входное воздействие f(t) и одна выходная координата x,(t) вектора x(t) , (t),..., Xn(t), в то время как остальные фазовые координаты Х2 (t),...,xn(t) не доступны прямому измерению. Уравнение модели 5 y(t)C y(t) + F(t), у(0) хс,, (3) где y(t)(t),..., yn(t)l - (n.x 1) - векС - известтор фазовых координат модели 5; ная матрица размера пкп (t) x(t)-y(t),(t) -у, (t),... Xn(t)-yn(t)l(5) удовлетворяет дифференциальному уравнению e(t) C8(t) +.(A-C)x(t), е(0)0. ИЛИ e(t) cg(t) -ь z(t)a; е (О)о (6), в (6) (гг л п) - матрица Z(t) и () - вектор а, содержащий неизвестные параметры объекта 1 управления вычисляются из соотнощения . (A-C)x(t)Z(t) а Из последнего следует, что а «nl cof{c,-a,,...cn-an) Выходная координата g(t) X, (t) -у, (t) блока 4 сравнения, удовлетворяет уравнению e(t) RT(t) а,(10) RI (t)(t), Г2,.{1),... rni(t) (11) - столбец, образованный из выходных координат интеграторов 2 н 3. Неизвестный вектор а в (10) вычисляется по формуле f . « Г rR.(t).E (t)-a t(12) В (12) r SR,(t). R (t)-at(13) На выходах квадраторов 13, 15 и второго умножителя 17 образуется произведение Ri(t)-RT(t),(14) фигурирующее под знаком интеграла в (13), , а на выходах третьих умножителей 19 и 20 произведениеRi(t)-(t), (15) являющееся подинтегральным выражением в (12). Дополнительные интеграторы 14, 18, 16, 21 и 22 осуществляют интегрирование полученных произведений (14) и (15). Матричный делитель 6 образует координаты Wii, ... Wnn в соответствии с формулой W Г-(16) . ил - . где - матрица, обратная к Г. Искомые неизвестные параметры ai, ,„ а, объекта 1 управления образуются на выходах сумматоров 11и 12, которые выполняют операции сложения по формулам а,..., ац ,(17) Устройство работает следующим образом. У объекта 1 управления параметры аi и aj в матрице (2) суть неизвестные постоянные. Приборному измерению доступно входное воздействие f(t) и одна выходная координата Х (t) объекта 1 управления. Остальные фазовы координаты X2(t), ..., Xn(t) не доступны jmn измерения. Неизвестнь е параметры ai, aj в процессе функционирования объекта измерены быть не могут. Устройство предназначено для определения численных значений неизвестных параметров л, &г в процессе реального функционирования объекта при неполной информации о-фазовых координатах объекта 1 управле ния, т.е. по измерениям входного воздействия f(t) и одной лишь выходной координаты Xi (t Для идентификации неизвестных параметров выходная координата xi (t) объекта 1 управле ния сравнивается с выходной координатой У (t) модели 5 на блоке 4 сравнения по формуле (9). Выходная координата Xi(t) объекта 1 управления соединена со входом первого нтегратора 2, стоящего в цепи из двух послеовательно соединенных интеграторов 2 и 3. . На выходах интеграторов 2 и 3 фо|мнрун тся сигналы rii(t) и rji(;t), .образующие первую строку Ri(t) (столбец) симметрической матридыR(tKll,(i:),R2CiV..,RhH) r«()r-i4(.(t) V:,,Ci)5iW...yi) Оказывается, что решение дифференцнальть го уравнения (6) при f (0)0 может быть представлено в виде произведения (пхп) - матрицы R (t) и (п XI) - вектора неизвестных параметров а, т.е, e(t) R(t).e(19) При этом матрица R(t) удовлетворяет дифференциальному уравнению R(t)CR(t) + Z(t), R(0)-0, (20) где матрица Z(t) задается формулЫ (7). Нетрудно убедиться, что R(t) - омметрическая матрица. В самом деле, каждый ее столбец R i (t) (i 1, ..., п) удовлетворяет уравнению. Ri(t) CRj(t) + Zi(t), R| (0)-в, (21) где Ri(t)coflr,i(t)r2i(t)... rni(t)l/ /22) Zi(t), Xj(t). При 3TOM в силу того, что матрицы А я С имеют вид (2) и (4) фазовые координаты xi(t) (i 1, ..., n-0 и rki(t) (k t, ... n-1) связаны соотнощеняем ii(t) xj,(t)(23) fkj(t) ,i(t)(24) Дифференцируя обе части уравнения (21) о времени, получаем Ri(t) CRi(t) - Zj(t). то с учетом (23) н (24) ддет R-,+,(t) CRu.(t) + Zi,(t, (25) тсюда следует, что матрица R(t), выражающаяя формулой (18)может быть представлена таке в следующем виде R(t) tRi(t), R2(t), Rn(t)l tR,(t), Ri(t), ... R,)l Теперь, учитывая (23), (24), (25) и (26). ясно, что матрица R(t) действительно симметрическая. Это обстоятельство ; является весьма существенным для идентификации неизвестных параметров при отсутствии приборных измерений фазовых координат Xj (t), ..., Xn (t) объекта 1 управления. Для отыскания численных значений неизвестных парамет.ров решается уравнение (10) по формуле (12 Выходы интеграторов 2 и 3 так ссединяются со входами квадраторов 13 и 15 и второго умножителя 17, чтобы сформировать произведение (14), которое затем интегриру-, ется с помощью дополнительных интеграторов 14, 16 и 18 с целью получения формулы (13 При зтом интегрирование ведется в течение конечного времени. Третьи умножители 19 и 20 формируют произведение (15), последую щее интегрирование которого осуществляется интеграторами 21 и 22. Матричный делитель 6 выполняет обращение матрицы Г заданной формулой (13). В силу линейной независимости столбцов матрицы (14) на любых конечны интервалах времени матрица Г является невырйжденной при любом 70, как матрица Грама для (14). Поэтому обратная матрица всегда существует и может быть вычислена по известной формуле где det Г;определитель матрицы Г ; Adj Гприсоединенная матрица к матрице Г . Выходные координаты Wi j , Wi j матричного делителя 6 и выходы дополнительных интеграторов 21 и 22 присоеди нены ко входам соответствующих первых умножителей, выходы которых подключены ко входам соответствующих сумматоров 11 и 12 таким образом, чтобы реализовать вычисления по формулам (12) и (17). На выходах сумматоров И и 12 образуются сигналы, численно равные соответствующим неизве ным параметрам ai, aj Изобретение может найти применение в те областях техники, где известные устройства идентификации ранее -не применялись. Оно позволяет существенно повысить точность управления за счет наперед заданного времени определения неизвестных параметров при неполной информации о векторе состояния сис темы. Кроме повышения точности и рас8 ширения области применения, предлагаемое устройство идентификации дает возможность упростить первоначальную наладку систем управления и снизить эксплуатационные расходы. Формула изобретения Устройство для идентификации параметров систем управления, содержащее последовательно соединенные интеграторы, входы первого соединены с выходами соответствующих интеграторов и выходом объекта, который подключен к первому входу блока сравнения, ко второму входу которого подсоединен через модель вход объекта, матричный делитель, выходы которого соединены с первыми входами первых умножителей, выходы которых присоединены ко входам соответствующих сумматоров, отличающееся тем, что, с целью повышения точности идентифика ции параметров при неполной информации о фазовых координатах объекта, в него введены вторые и третьи умножители, квадраторы и дополнительные интеграто{)ы, причем выходы интеграторов через соответствующие последовательно соединенные квадратор и дополнительный интегратор подключены к соответствующим входам матричного делителя, выходы каждой пары интеграторов соединены со входами соответствующих вторых умножителей, выходы которых через соответствующие дополнительные интеграторы подключены ко входам матричного делителя, выходы интеграторов подключены к первым входам третьих умножителей, ко вторым входам которых подключен выход блока сравнения, а выходы третьих умножителей через соответствующие дополнительные интеграторы подключены ко вторым входам соответствующих первых умножителей. Источники информации, принятые во внимание при экспертизе 1. Кику А. Г. и др. Адаптивные системы идентификации. К., Наукова думка, 1975, с. 5-23. 2. Авторское свидетельство СССР № 650053, кл. G 05 В 17/00, 1979 (прототип).
