Область техники, к которой относится изобретение
Изобретение относится к робототехническим комплексам и области радиоизмерений, обеспечивающих высокоточное позиционирование технологического средства по четырем координатам в пространстве.
Уровень техники
Из уровня техники известно устройство измерения ширины и высоты транспортного средства, например, грузовика (см. [1] полезная модель Китая № 203501986, МПК G01B 11/04, опубл. 26.03.2014), содержащее инфракрасную световую завесу, портальную раму с установленными на ней сканерами для определения высоты и ширины транспортного средства, компьютера и шкафа бля сбора информации. Недостатком данного аналога является неподвижная конструкция портальной рамы, отсутствие возможности замены сканера на другие технологические устройства для замеров физических величин, что сужает область использования устройства.
Из уровня техники известен высокоточный робот для планарного сканера (см. [2] патент США № 6545440, МПК B25J 9/02, опубл. 04.08.2003), содержащий базовый элемент, расположенный вдоль оси Х, поперечный элемент, установленный с возможностью перемещения на базовом элементе и расположенный вдоль оси Y, поперечной оси Х. Робот имеет Y-каретку для измерительного зонда, подвижно закрепленного на поперечном элементе вдоль оси Y. Оси X, Y и Z определяют декартову систему координат. Робот имеет инновационную структуру, которая обеспечивает высокую точность относительно оси Z, обеспечивая плоскую и устойчивую опорную поверхность вдоль оси Y (вертикальная ось). Положение Y-каретки относительно оси является предсказуемой функцией измеренного положения Y-каретки на опорной поверхности, и наклон твердого тела опорной поверхности. Высокая точность достигается за счет использования гранитной плиты для обеспечения плоской эталонной поверхности, расположенной вдоль оси Y для поперечного элемента. Гранитная плита поддерживается структурной рамой, и измерительный зонд может быть установлена на Y-каретку, которая подвижно крепятся к опорной поверхности плиты гранита. Декартовский робот особенно подходит для антенных измерительных сканеров ближнего поля, которые требуют высокой точности, таких как сканеры для высокочастотной антенны.
Наиболее близким аналогом заявленного изобретения, взятым за прототип, является планарный сканер (см. [3] авторское свидетельство СССР № 1841123, МПК G01R 29/10, опубл. 27.04.2016), содержащий пару горизонтальных направляющих, относительно которых вдоль оси ОХ перемещается горизонтальная тележка. На опорной ферме, установленной на горизонтальной тележке, закреплена первая вертикальная направляющая, опирающаяся своим верхним концом на опорную полосу. Параллельно первой вертикальной направляющей введены вторая и третья, установленные на одной прямой, перпендикулярной области сканирования. Вторая и третья вертикальные направляющие закреплены на опорной ферме посредством элементов регулирования прямолинейности направляющих. Вдоль вертикальных направляющих перемещается вертикальная каретка с зондом, подключенным к тракту передачи сигнала. Вертикальная каретка установлена на вертикальных направляющих посредством восьми опор, выполненных в виде узлов подшипников качения. Механизм перемещения зонда состоит из ползуна и кулисы. Горизонтальная тележка и вертикальная каретка механически сочленены с координатным приводом, связанным с датчиком кодов разметки матрицы. Кроме того, устройство содержит систему юстировки вертикальных направляющих, включающую в себя датчик неплоскостности, буферный накопитель, генератор кодов адреса, вычислитель среднеарифметического отклонения, сумматор, индикатор отклонения, связанный с исполнительным механизмом.
Недостатком аналогов и прототипа является отсутствие возможности объемного измерения исследуемого объекта (например, параболические антенны, АФАР и др.) из-за невозможности наклонного перемещения технологического устройства. Также аналог и прототип не могут производить корректные измерения с изделиями, различия в высоте которых более 3 м (значение перемещения по оси Z).
Сущность изобретения
Задачей заявленного изобретения является устранении указанных недостатков прототипа и аналогов.
Техническим результатом является расширение функциональных возможностей сканера за счет возможности измерения радиотехнических и геометрических характеристик объекта различных размеров от 0,1 до 4 метров с различными методиками сканирования, включающими планарное горизонтальное, вертикальное, наклонное и сферическое сканирование; а также снижение времени наладки объекта перед измерениями за счет возможности наклонных движений с подстройкой под расположение объекта.
Поставленная задача решается, а технический результат достигается за счет портального сканера содержащего две приводные Х-тележки, установленные с возможностью перемещения вдоль оси Х на двух горизонтальных направляющих, две приводных Z-тележки, установленные с возможностью перемещения вдоль оси Z, и приводная Y-тележка с технологическим средством, установленная с возможностью перемещения вдоль оси Y, причем две горизонтальные направляющие выполнены в виде двух Х-слайдеров, две приводные Z-тележки установлены на соответствующих двух Z-слайдерах, каждый из которых закреплен на вертикальной ферме, причем каждая вертикальная ферма закреплена на соответствующей приводной Х-тележке, а вертикальные фермы, в верхней части, соединены между собой при помощи горизонтальной фермы для увеличения жесткости конструкции, при этом к приводным Z-тележкам прикреплен Y-слайдер, на котором установлена приводная Y-тележка с технологическим средством.
Также технический результат достигается за счет того, что Х-тележки, Y-тележка и Z-тележки снабжены приводом для перемещения по осям X, Y и Z на соответствующих слайдерах.
Также технический результат достигается за счет того, что технологическое устройство выполнено в виде лазерного датчика и/или антенны зонда или оптического измерительного устройства.
Также технический результат достигается за счет того, что технологическое средство выполнено с возможностью движения по линейной траектории.
Также технический результат достигается за счет того, что технологическое средство выполнено с возможностью движения по сферической траектории.
Краткое описание чертежей
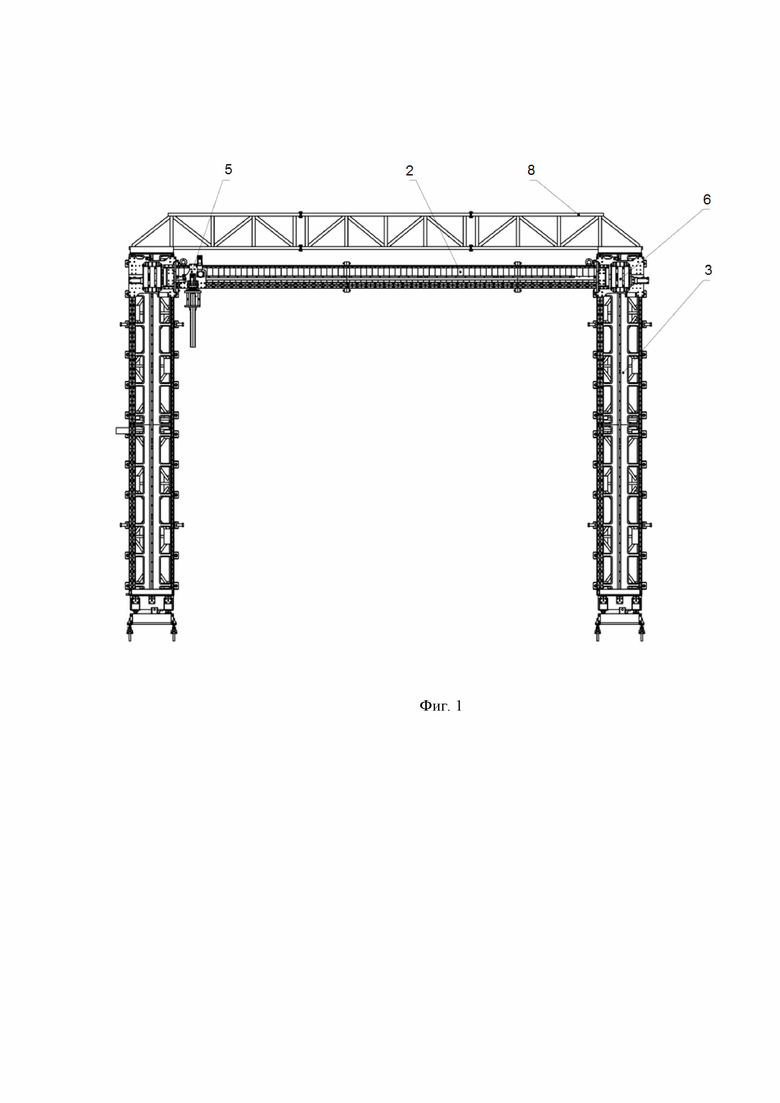
Фигура 1. Вид спереди портального сканера.
Фигура 2. Вид сбоку портального сканера.
Фигура 3. Вид сверху портального сканера.
На фигурах обозначены следующие позиции:
1 — Х-слайдер; 2 – Y-слайдер; 3 – Z-слайдер; 4 – приводная X-тележка; 5 – приводная Y-тележка; 6 – приводная Z-тележка; 7 – вертикальная ферма; 8 – горизонтальная ферма; 9 – технологическое средство.
Осуществление изобретения
Созданное решение позволяет проводить измерения радиотехнических и геометрических характеристик объектов.
Портальный сканер состоит из пары горизонтальных направляющих, выполненных в виде двух Х-слайдеров (1), на каждом из которых закреплена приводная Х-тележка (4) с возможностью перемещения по оси Х. На каждой приводной Х-тележке (4) закреплена вертикальная ферма (7), на каждой из которой установлен Z-слайдер (3) с приводной Z-тележкой (6), выполненных с возможностью перемещения по оси Z. Вертикальные фермы (7), в верхней части, соединены между собой при помощи горизонтальной фермы (8), для увеличения жесткости конструкции. На Z-тележках (6) закреплен Y-слайдер (2) с приводной Y-тележкой (5). На приводной Y-тележке (5) установлено технологическое средство (9), например, лазерного датчика и/или антенны зонда или оптического измерительного устройства и др., позволяющее выполнять высокоточные бесконтактные измерения. Х-тележки, Y-тележка и Z-тележки снабжены приводом для перемещения по осям X, Y и Z на соответствующих слайдерах.
Полезный объем области перемещения технологическое средство (9) существенно увеличивается за счет вертикального перемещения Y-слайдера. В этом случае нет необходимости установки на Y-тележку ползуна - вертикального слайдера с тележкой для перемещения по оси Z на базе отдельного конструктивного элемента. Увеличиваются динамические характеристики за счет отсутствия массивного ползуна на Y-тележке.
Портальный сканер позволяет применять интерполяцию траекторий движения конструкции, что позволяет работать с объектами исследования без особого стапельного крепления – сканер автоматически корректирует траекторию движения в зависимости от наклона объекта.
Сканер имеет мостовую (портальную) конструкцию с двумя тандемными осями – по координате горизонтального перемещения (движение X-слайдеров вперед-назад), а также вертикального перемещения (движения Y-слайдера вверх-вниз), с функцией линейной 3-осевой интерполяции движения и функции калибровки для повышения точности перемещения. Сканер обеспечивает высокоточное позиционирование технологического средства (антенны, лазерного датчика) по четырем координатам в пространстве: горизонтальное, вертикальное, наклонное и сферическое, что позволяет выполнять высокоточное сканирование геометрических характеристик исследуемого объекта (параболические антенны, АФАР или другие объекты).
В заявленном портальном сканере новым является возможность движения вверх-вниз Y-слайдера портала для осуществления движения вдоль оси Z (вверх-вниз).
Заявленный портальный сканер позволяет произвести высокоточное позиционирование технологического устройства (антенны-зонда, оптической измерительной машины) по четырем координатам в пространстве. Технологические устройства перемещается на закрепленной тележке над установленным объектом для исследования или проведения технологических операций. Для данных объектов сканер позволяет измерить диаграммы направленности, коэффициента усиления и произвести настройку антенных систем. Измерения амплитуды и фазы радиочастотного сигнала антенн производятся на векторном анализаторе цепей (любых производителей).
Также объектом для исследования могут быть крупногабаритные изделия, которые требует контроля геометрических характеристик (параболические антенны, АФАР или другие объекты). Для данных объектов сканер является высокоточной бесконтактной координатно-измерительной машиной (с установленной оптической измерительной машиной).
Кинематическая схема сканера представляет собой портальную систему с перемещающейся колонной и перемещающейся перемычкой. Перемещение осуществляется по трем линейным координатам X, Y, Z (влево/вправо, вперед/назад, вверх/вниз) и одну поворотную оси для вращения технологического средства (измерительного устройства).
В статике устройство представляет собой П-образный портал. При подаче команд перемещение устройство позволяет задать любую координату в пространстве рабочей зоны сканера, определяемой зоной перемещения по каждой линейной оси, для позиционирования технологического средства (антенны-зонда или оптической измерительной машины). В рабочей зоне сканера устанавливается объект для исследования (измеряемая антенна или другой объект) и при перемещении технического средства происходит сканирование для выявления создаваемого электромагнитного поля в радиочастотном спектре при работе с антенной-зондом либо геометрических характеристик объекта.
Пример 1 – измерение амплитудно-фазового распределения поля антенн.
Оператор устанавливает измеряемую антенну в объеме сканера. Установка возможно непосредственно на пол или специальной оснастке (стапель, телега и др.) так, чтобы апертура антенны была ориентирована в сторону Y-слайдера и находилась в пределах перемещений X и Y тележки. Далее оператор подключает антенну коаксиальным кабелем к анализатору цепей. Перед запуском оператор задает область перемещения тележек сканера. После этого оператор подает команду на запуск измерительного процесса. После запуска Х, Y, Z-тележки перемещаются в стартовое положение и затем начинают синхронное движение по заданной оператором траектории. Установленное на сканере технологическое средство (для измерения параметров антенн это антенна-зонд) производит прием или передачу радиочастотного сигнала на анализатор цепей. Сканер фиксирует данные текущего положения технологического средства и данные амплитуды, и фазы радиочастотного сигнала, полученного с анализатора цепей. Получив данные во всем заданном диапазоне перемещений сохраняется амплитудно-фазовое распределение поле измеряемой антенны.
Пример 2 – измерение плоскости плоских щелевых фазированных антенных решеток.
Оператор устанавливает измеряемую плоскую щелевую фазированную антенную решетку в объеме сканера. Установка возможно непосредственно на пол или специальной оснастке (стапель, телега и др.) так, чтобы апертура антенны была ориентирована в сторону Y-слайдера и находилась в пределах перемещений X и Y тележки. Далее оператор подключает оптическое измерительное устройство (например, лазерный датчик измерения расстояния) к сканеру. Перед запуском оператор задает область перемещения тележек сканера. После этого оператор подает команду на запуск измерительного процесса. После запуска Х, Y, Z-тележки перемещаются в стартовое положение и затем начинают синхронное движение по заданной оператором траектории. Установленное на сканере технологическое средство производит измерение расстояния до антенной решетки. Сканер фиксирует данные текущего положения технологического средства и данные расстояния до антенной решетки. Получив данные во всем заданном диапазоне перемещений сохраняется данные о плоскостности антенной решетки. Если отклонения от допусков плоскостности антенной решетки превышают заданные производителем данной решетки показатели, то принимается решение о доработки антенной решетки или ее отбраковке.
Представленные ранее изделия на рынке для осуществления движения вдоль оси Z имели ползун, который перемещался по Y-слайдеру, т.е. ползун — это та же тележка с закрепленной на нем балкой, которая перемещается вверх-вниз вдоль оси Z, однако размер этой балки определяет длину перемещения вдоль оси Z, а в заявленном изобретении размер перемещения вдоль оси Z определяется размером вертикальных ферм, которые могут быть существенно выше. Данный ползун может осуществлять движение вверх-вниз только в рамках своих габаритов, при этом при движении вверх его габариты существенно расширяют занимаемую сканером область по высоте конструкции, что выявляет строгую необходимость увеличивать высоту потолков. Также при увеличении ходов перемещения по оси Z ползун должен быть увеличен пропорционально, что приводит к возрастанию массы ползуна, соответственно увеличивая нагрузку на перемычку портала. Повышение нагрузки на перемычку приводит к ее прогибам, а значит к уменьшению точности перемещения, а также снижению динамических характеристик (скорости перемещения). На практике ползун не делают с ходом перемещения вдоль оси Z более 3 метров. В заявленном сканере величина перемещения может доходить до 4 метров. Это позволяет работать как с плоскими объектами, так и с высокими объектами в диапазоне от 0,1 до 4 метров.
Техническое решение является уникальным не только в плане идеи движимой перемычки, но и реализации данной идеи. Реализовать данную идею возможно только в случае выдерживания очень строгих допусков на базу портала, по которой движется портал (П-образная конструкция – колонны и перемычка). Если база будет иметь существенные отклонения от горизонта и крены, то портал будет деформироваться, и перемычка не сможет перемещаться вверх-вниз.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЛАНАРНЫЙ СКАНЕР | 1989 |
|
SU1841123A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ АМПЛИТУДНО-ФАЗОВОГО РАСПРЕДЕЛЕНИЯ ПОЛЯ АНТЕННЫ | 1991 |
|
SU1841106A1 |
| ИНТЕГРИРОВАННАЯ СИСТЕМА И СПОСОБ ДЛЯ ТРЕХОСЕВОГО СКАНИРОВАНИЯ НА МЕСТЕ И ОБНАРУЖЕНИЯ ДЕФЕКТОВ В ОБЪЕКТЕ ПРИ СТАТИЧЕСКОМ И ЦИКЛИЧЕСКОМ ИСПЫТАНИИ | 2017 |
|
RU2703496C1 |
| АДАПТИВНЫЙ ПНЕВМОГИДРАВЛИЧЕСКИЙ РОБОТ | 2002 |
|
RU2224637C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ СВАРКИ ТИТАНОВЫХ СПЛАВОВ В КАМЕРЕ С КОНТРОЛИРУЕМОЙ АТМОСФЕРОЙ | 2020 |
|
RU2746506C1 |
| ПЕРЕДВИЖНОЙ РАЗГРУЗОЧНЫЙ КОМПЛЕКС | 2005 |
|
RU2414410C2 |
| КОМБИНИРОВАННЫЙ МАНИПУЛЯТОР РОБОТОХИРУРГИЧЕСКОГО КОМПЛЕКСА | 2019 |
|
RU2721485C1 |
| МОДУЛЬ ФАСОННОГО РАСКРОЯ ПРОФИЛЬНОГО ПРОКАТА | 1991 |
|
RU2028902C1 |
| СПОСОБ ДЛЯ СОПОСТАВЛЕНИЯ ПОКАЗАТЕЛЕЙ ИЗМЕРЕНИЙ ПОЗИЦИИ И ПРОФИЛЯ ДЛЯ ГРУЗОПОДЪЕМНОГО УСТРОЙСТВА | 2021 |
|
RU2795358C2 |
| КООРДИНАТНЫЙ СТОЛ (ВАРИАНТЫ) | 2003 |
|
RU2244617C1 |


Изобретение относится к робототехническим комплексам и области радиоизмерений, обеспечивающих высокоточное позиционирование технологического средства по четырем координатам в пространстве. Портальный сканер содержит две приводные Х-тележки, установленные с возможностью перемещения вдоль оси Х на двух горизонтальных направляющих, две приводные Z-тележки, установленные с возможностью перемещения вдоль оси Z, и приводную Y-тележку с технологическим средством, установленную с возможностью перемещения вдоль оси Y. Две горизонтальные направляющие выполнены в виде двух Х-слайдеров, две приводные Z-тележки установлены на соответствующих двух Z-слайдерах, каждый из которых закреплен на вертикальной ферме. Каждая вертикальная ферма закреплена на соответствующей приводной Х-тележке, а в верхней части вертикальные фермы соединены между собой с помощью горизонтальной фермы. К приводным Z-тележкам прикреплен Y-слайдер, на котором установлена приводная Y-тележка с технологическим средством. В результате расширяются функциональные возможности сканера и снижается время наладки объекта перед измерениями. 4 з.п. ф-лы, 3 ил., 2 пр. 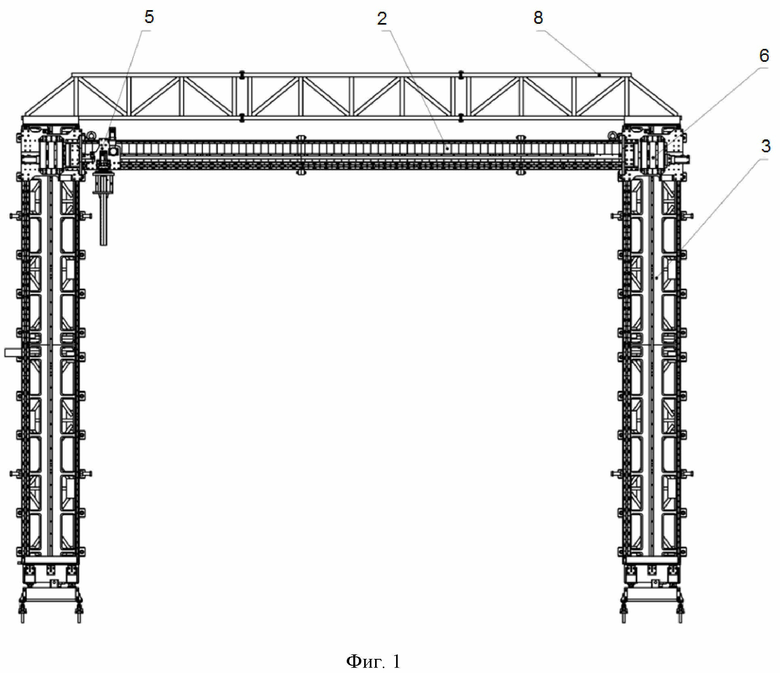
1. Портальный сканер, содержащий две приводные Х-тележки, установленные с возможностью перемещения вдоль оси Х на двух горизонтальных направляющих, две приводных Z-тележки, установленные с возможностью перемещения вдоль оси Z, и приводная Y-тележка с технологическим средством, установленная с возможностью перемещения вдоль оси Y, отличающийся тем, что две горизонтальные направляющие выполнены в виде двух Х-слайдеров, две приводные Z-тележки установлены на соответствующих двух Z-слайдерах, каждый из которых закреплен на вертикальной ферме, причем каждая вертикальная ферма закреплена на соответствующей приводной Х-тележке, а в верхней части вертикальные фермы соединены между собой с помощью горизонтальной фермы с обеспечением жесткости конструкции, при этом к приводным Z-тележкам прикреплен Y-слайдер, на котором установлена приводная Y-тележка с технологическим средством.
2. Портальный сканер по п. 1, отличающийся тем, что Х-тележки, Y-тележка и Z-тележки снабжены приводом для перемещения по осям X, Y и Z на соответствующих слайдерах.
3. Портальный сканер по п. 1, отличающийся тем, что технологическое устройство выполнено в виде лазерного датчика и/или антенны-зонда или оптического измерительного устройства.
4. Портальный сканер по п. 1, отличающийся тем, что технологическое средство выполнено с возможностью движения по линейной траектории.
5. Портальный сканер по п. 1, отличающийся тем, что технологическое средство выполнено с возможностью движения по сферической траектории.
| ПЛАНАРНЫЙ СКАНЕР | 1989 |
|
SU1841123A1 |
| Способ получения полистирола | 1955 |
|
SU105466A1 |
| Способ получения эмульсии для замасливания шерстяного и полушерстяного лоскута, перерабатываемого в искусственную шерсть | 1950 |
|
SU94714A1 |
| US 6545440 B2, 08.04.2003. | |||

